- Плоская система произвольно расположенных сил

Содержание
- 2. Перечень вопросов: Приведение силы к данной точке. Теорема Пуансо. Приведение системы сил к данной точке. Свойства
- 3. Плоская система произвольно расположенных сил - это система, у которой силы расположены в одной плоскости и
- 4. 1.Приведение силы к данной точке.Теорема Пуансо. Из аксиом статики мы знаем, что силу можно переносить по
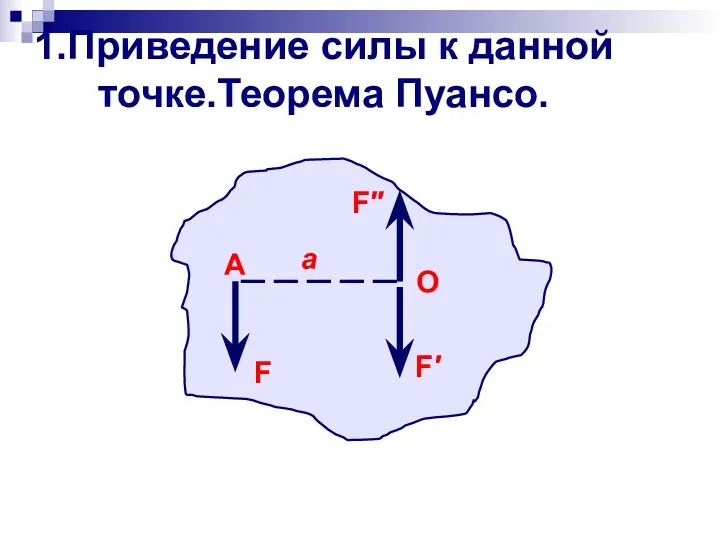
- 5. 1.Приведение силы к данной точке.Теорема Пуансо. А О F a F″ F′
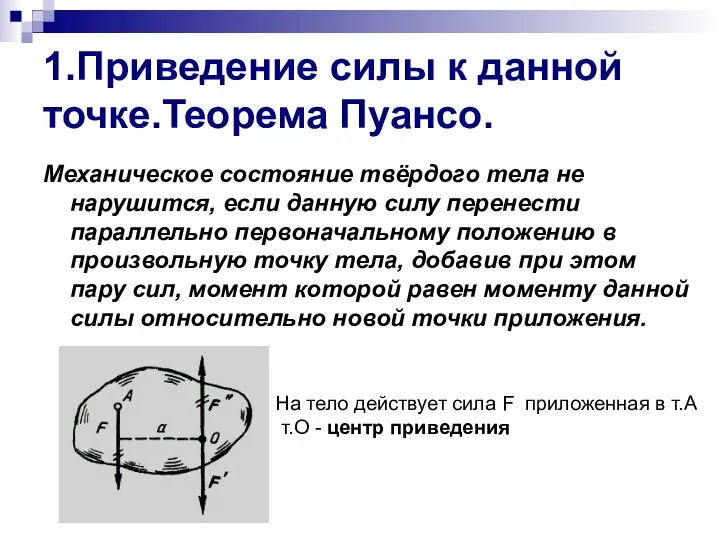
- 6. 1.Приведение силы к данной точке.Теорема Пуансо. Механическое состояние твёрдого тела не нарушится, если данную силу перенести
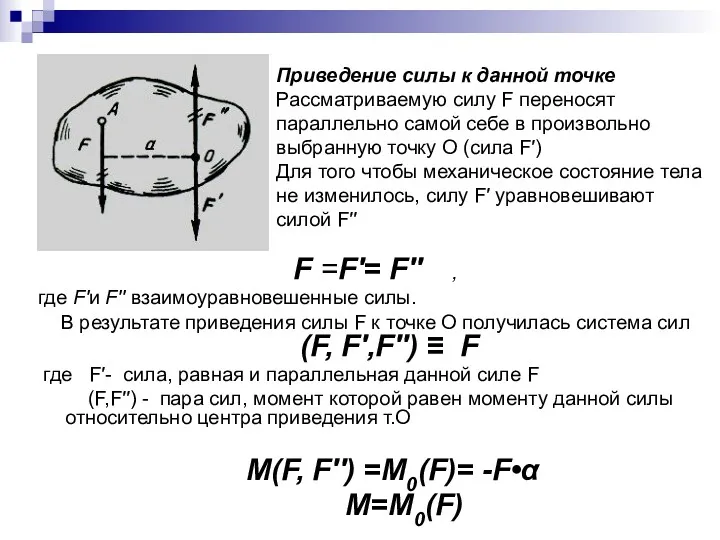
- 7. F =F′= F′′ , где F′и F′′ взаимоуравновешенные силы. В результате приведения силы F к точке
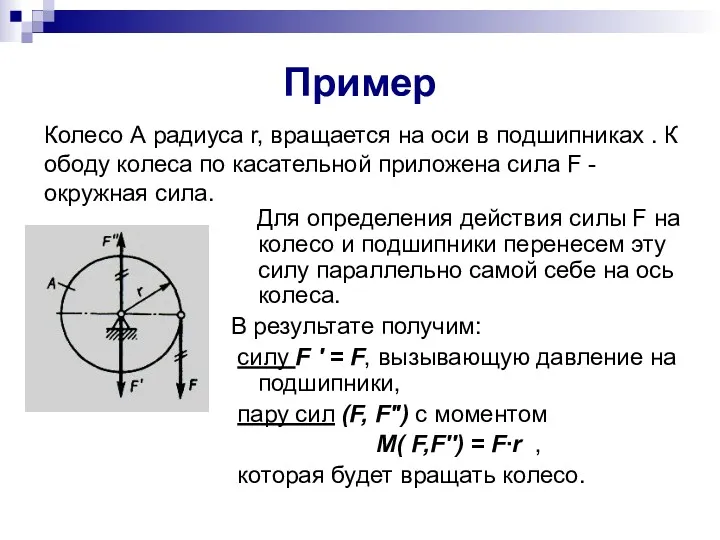
- 8. Пример Для определения действия силы F на колесо и подшипники перенесем эту силу параллельно самой себе
- 9. 2.Приведение системы сил к данной точке. Приведением системы сил называется замена её другой системой, эквивалентной первой,
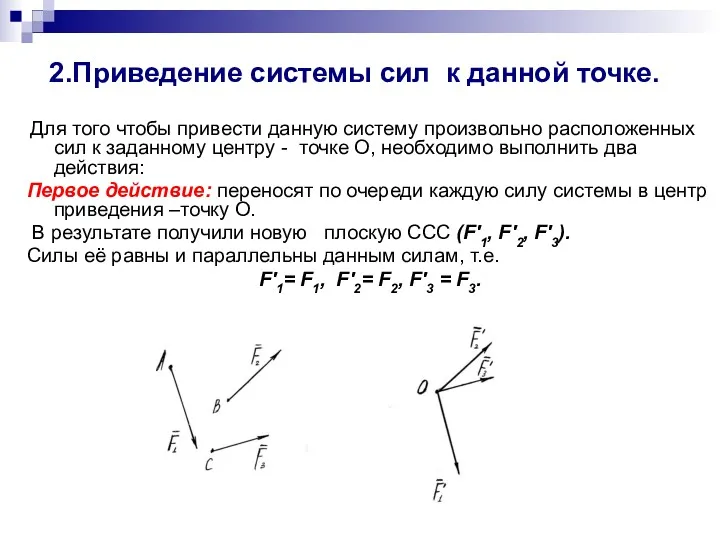
- 10. 2.Приведение системы сил к данной точке. Для того чтобы привести данную систему произвольно расположенных сил к
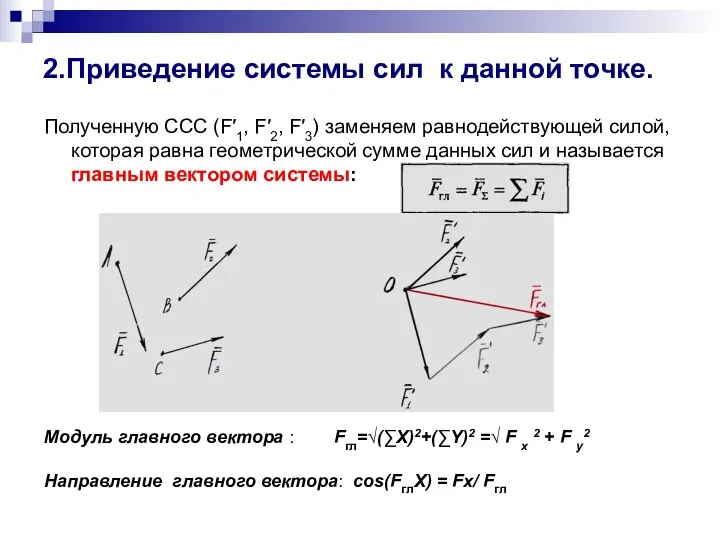
- 11. 2.Приведение системы сил к данной точке. Полученную ССС (F′1, F′2, F′3) заменяем равнодействующей силой, которая равна
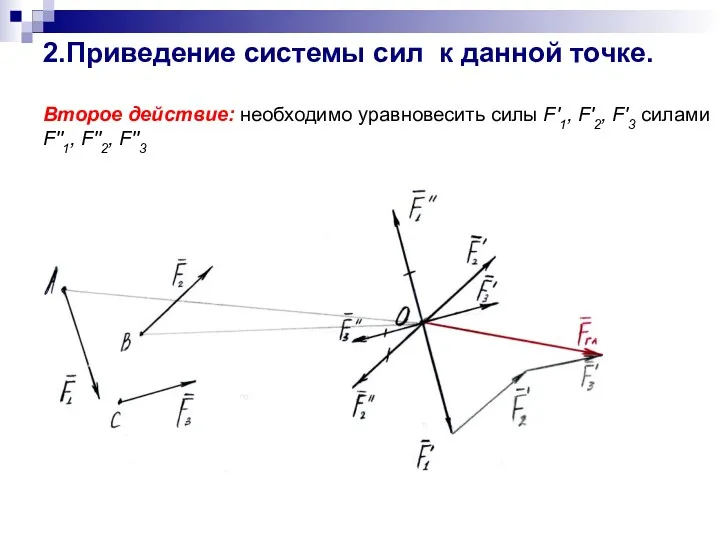
- 12. 2.Приведение системы сил к данной точке. Второе действие: необходимо уравновесить силы F′1, F′2, F′3 силами F′′1,
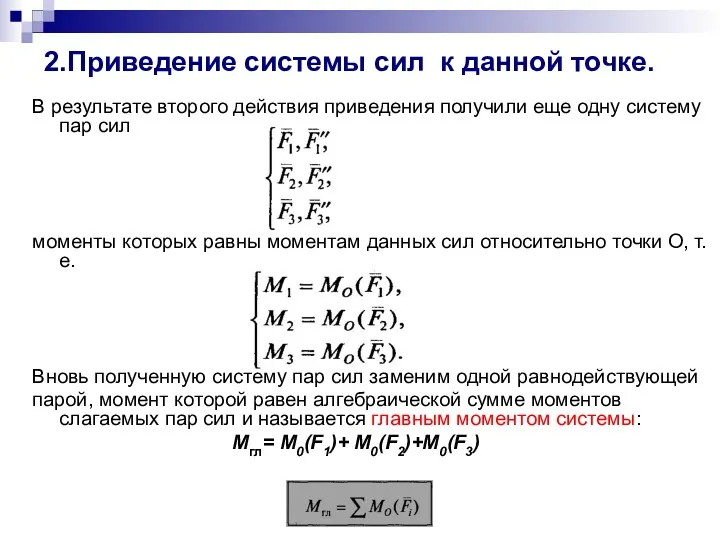
- 13. 2.Приведение системы сил к данной точке. В результате второго действия приведения получили еще одну систему пар
- 14. 2.Приведение системы сил к данной точке. Следовательно, в общем случае плоская система сил в результате приведения
- 15. 3. Свойства главного вектора и главного момента 1.Модуль и направление главного вектора не зависят от выбора
- 16. 3.Свойства главного вектора и главного момента 3. Главный вектор и равнодействующая системы сил векторно равны, но
- 17. 4.Теорема о моменте равнодействующей относительно точки (Теорема Вариньона) Момент равнодействующей силы относительно, какой либо точки, расположенной
- 18. Случаи приведения плоской системы произвольно расположенных сил 1.Fгл≠0, Мгл ≠0,- общий случай. Система сил эквивалентна равнодействующей,
- 19. 5.Условия и уравнения равновесия плоской системы сходящихся сил. Для равновесия плоской системы сил необходимо и достаточно,
- 20. 5.Условия и уравнения равновесия плоской системы сходящихся сил. Для равновесия плоской системы сил необходимо и достаточно,
- 21. Уравнения равновесия 1) ∑Fix =0 2) ∑Fiy =0 3) ∑Mo (Fi) =0 Вторая форма уравнения равновесия
- 22. Уравнения равновесия Вторая форма уравнения равновесия 1) ∑Fix =0 2) ∑MА (Fi ) =0 3) ∑MВ
- 23. Закрепление пройденного материала
- 24. ВОПРОСЫ ДЛЯ САМОКОНТРОЛЯ Зависят ли значение и направление главного вектора от положения центра приведения? А) не
- 27. Сила тяжести стержня равна 150 Н. Определите момент силы тяжести относительно закрепленного конца стержня – точки
- 30. Домашнее задание
- 31. Домашнее задание: [1] стр.27-35; Изучить параграф 17 (стр. 29-30) [1] и найти ошибки в рисунке 30
- 33. Скачать презентацию
Перечень вопросов:
Приведение силы к данной точке. Теорема Пуансо.
Приведение системы сил к
Перечень вопросов:
Приведение силы к данной точке. Теорема Пуансо.
Приведение системы сил к
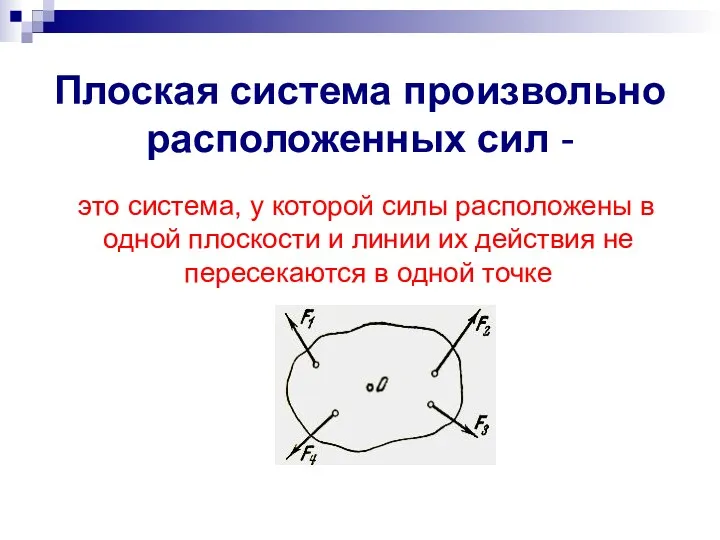
Плоская система произвольно расположенных сил -
это система, у которой силы
Плоская система произвольно расположенных сил -
это система, у которой силы
1.Приведение силы к данной точке.Теорема Пуансо.
Из аксиом статики мы знаем, что
1.Приведение силы к данной точке.Теорема Пуансо.
Из аксиом статики мы знаем, что
1.Приведение силы к данной точке.Теорема Пуансо.
А
О
F
a
F″
F′
1.Приведение силы к данной точке.Теорема Пуансо.
А
О
F
a
F″
F′
1.Приведение силы к данной точке.Теорема Пуансо.
Механическое состояние твёрдого тела не нарушится,
1.Приведение силы к данной точке.Теорема Пуансо.
Механическое состояние твёрдого тела не нарушится,
F =F′= F′′ ,
где F′и F′′ взаимоуравновешенные силы.
В результате приведения
F =F′= F′′ ,
где F′и F′′ взаимоуравновешенные силы.
В результате приведения
Пример
Для определения действия силы F на колесо и подшипники
Пример
Для определения действия силы F на колесо и подшипники
2.Приведение системы сил к данной точке.
Приведением системы сил называется
2.Приведение системы сил к данной точке.
Приведением системы сил называется
2.Приведение системы сил к данной точке.
Для того чтобы привести данную
2.Приведение системы сил к данной точке.
Для того чтобы привести данную
2.Приведение системы сил к данной точке.
Полученную ССС (F′1, F′2, F′3) заменяем
2.Приведение системы сил к данной точке.
Полученную ССС (F′1, F′2, F′3) заменяем
2.Приведение системы сил к данной точке.
Второе действие: необходимо уравновесить силы F′1,
2.Приведение системы сил к данной точке. Второе действие: необходимо уравновесить силы F′1,
2.Приведение системы сил к данной точке.
В результате второго действия приведения получили
2.Приведение системы сил к данной точке.
В результате второго действия приведения получили
2.Приведение системы сил к данной точке.
Следовательно, в общем случае плоская
2.Приведение системы сил к данной точке.
Следовательно, в общем случае плоская
3. Свойства главного вектора и главного момента
1.Модуль и направление главного
3. Свойства главного вектора и главного момента
1.Модуль и направление главного

3.Свойства главного вектора и главного момента
3. Главный вектор и равнодействующая системы
3.Свойства главного вектора и главного момента
3. Главный вектор и равнодействующая системы
4.Теорема о моменте равнодействующей относительно точки
(Теорема Вариньона)
Момент равнодействующей силы относительно,
4.Теорема о моменте равнодействующей относительно точки
(Теорема Вариньона)
Момент равнодействующей силы относительно,
Случаи приведения плоской системы произвольно расположенных сил
1.Fгл≠0, Мгл ≠0,-
Случаи приведения плоской системы произвольно расположенных сил
1.Fгл≠0, Мгл ≠0,-
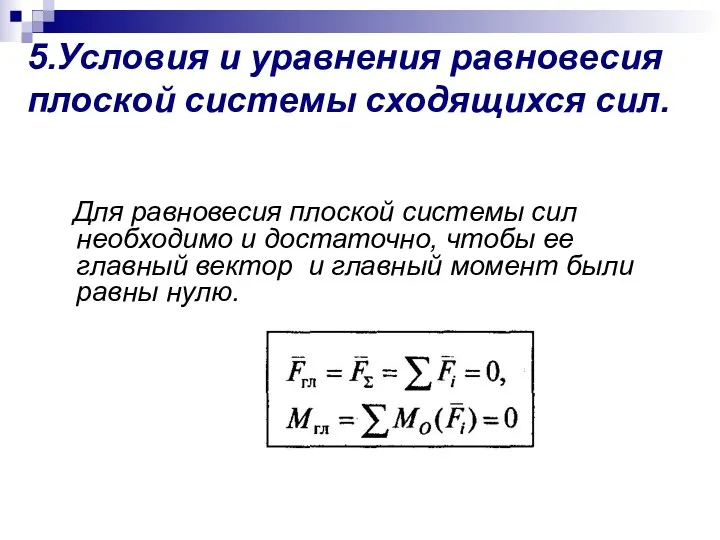
5.Условия и уравнения равновесия плоской системы сходящихся сил.
Для равновесия плоской
5.Условия и уравнения равновесия плоской системы сходящихся сил.
Для равновесия плоской
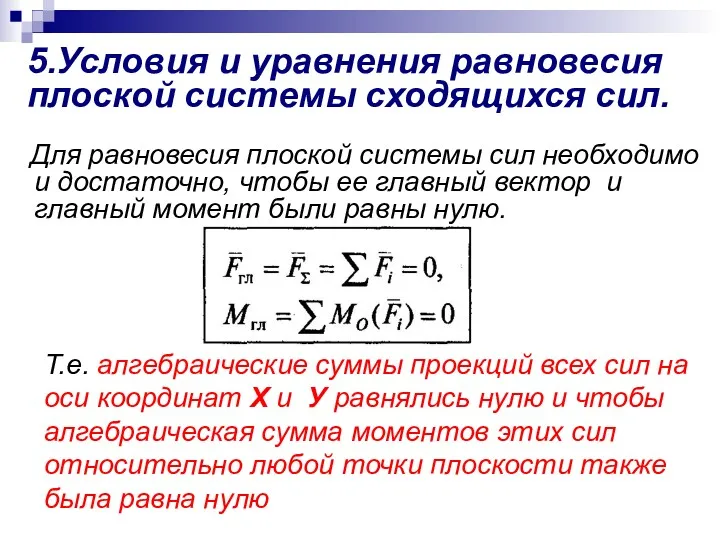
5.Условия и уравнения равновесия плоской системы сходящихся сил.
Для равновесия плоской
5.Условия и уравнения равновесия плоской системы сходящихся сил.
Для равновесия плоской
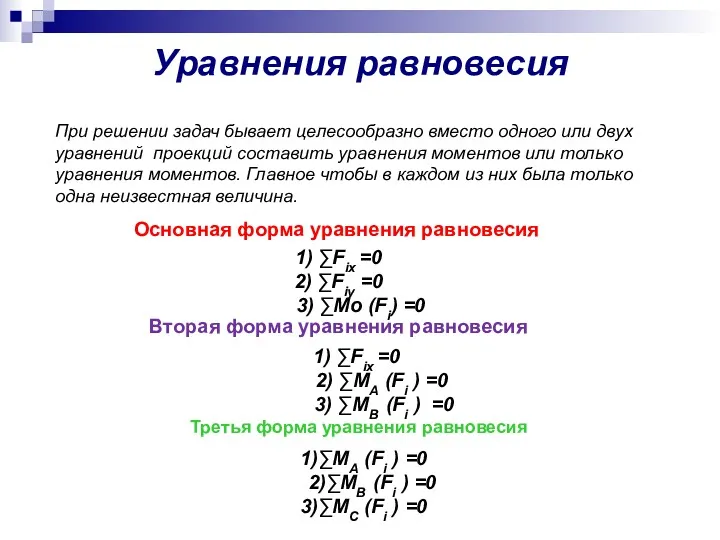
Уравнения равновесия
1) ∑Fix =0
2) ∑Fiy =0
3) ∑Mo (Fi)
Уравнения равновесия
1) ∑Fix =0
2) ∑Fiy =0
3) ∑Mo (Fi)
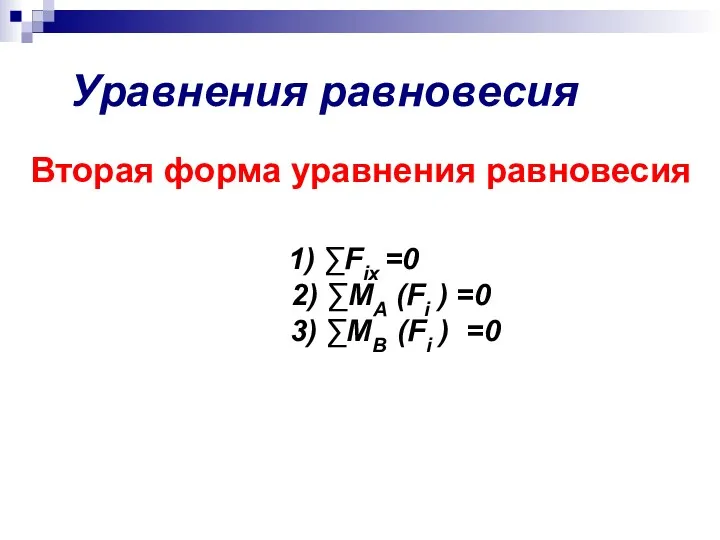
Уравнения равновесия
Вторая форма уравнения равновесия
1) ∑Fix =0
2) ∑MА (Fi )
Уравнения равновесия
Вторая форма уравнения равновесия
1) ∑Fix =0
2) ∑MА (Fi )

Закрепление пройденного материала
Закрепление пройденного материала
ВОПРОСЫ ДЛЯ САМОКОНТРОЛЯ
Зависят ли значение и направление главного вектора от
ВОПРОСЫ ДЛЯ САМОКОНТРОЛЯ
Зависят ли значение и направление главного вектора от
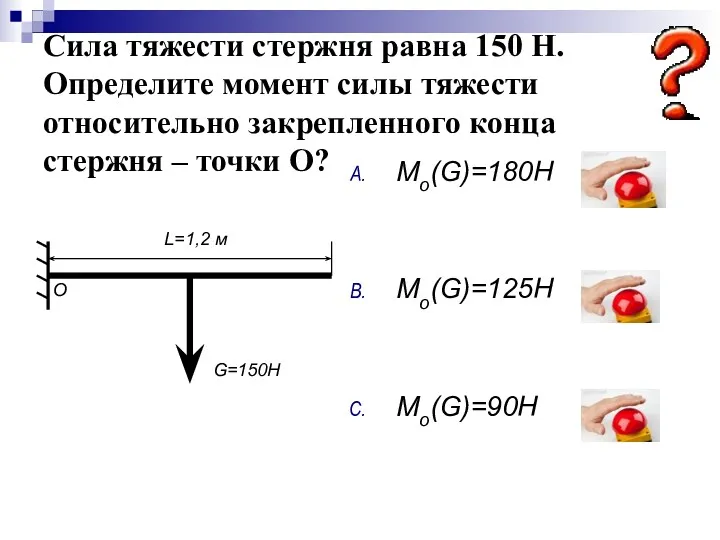
Сила тяжести стержня равна 150 Н. Определите момент силы тяжести относительно
Сила тяжести стержня равна 150 Н. Определите момент силы тяжести относительно
Домашнее задание
Домашнее задание
![Домашнее задание: [1] стр.27-35; Изучить параграф 17 (стр. 29-30) [1]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/289610/slide-30.jpg)
Домашнее задание:
[1] стр.27-35;
Изучить параграф 17 (стр. 29-30) [1] и найти ошибки
Домашнее задание:
[1] стр.27-35;
Изучить параграф 17 (стр. 29-30) [1] и найти ошибки
 Характеристики датчиков
Характеристики датчиков UravneniaMaxvellaEMV2122
UravneniaMaxvellaEMV2122 Работа силы. Значения слова работа
Работа силы. Значения слова работа Оружие ведущее к победе
Оружие ведущее к победе Детектирование нейтронов
Детектирование нейтронов Остойчивость судна в различных условиях плавания
Остойчивость судна в различных условиях плавания Unmanned Combat Air Vehicle System Demonstration Program First Flights and Beyond
Unmanned Combat Air Vehicle System Demonstration Program First Flights and Beyond Дәріс Электротехника курсына кіріспе
Дәріс Электротехника курсына кіріспе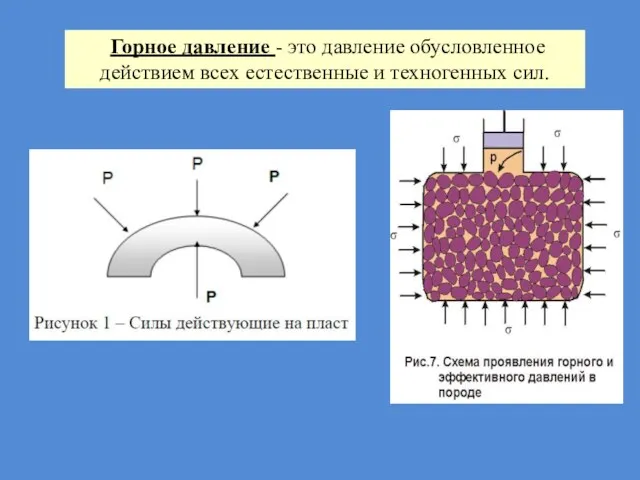 Горное давление
Горное давление Презентация Параллельное и последовательное соединение
Презентация Параллельное и последовательное соединение Применение сообщающихся сосудов
Применение сообщающихся сосудов Датчики температуры
Датчики температуры Система охолодження двигунів автомобіля
Система охолодження двигунів автомобіля Загальна будова легкового автомобіля
Загальна будова легкового автомобіля Знакомство с энциклопедией атомной отрасли
Знакомство с энциклопедией атомной отрасли Электризация тел. Два рода зарядов
Электризация тел. Два рода зарядов Буксы. Типы букс
Буксы. Типы букс Пример решения задачи на расчет цепи постоянного тока с конденсатором
Пример решения задачи на расчет цепи постоянного тока с конденсатором Geschichte der Eisenbahn
Geschichte der Eisenbahn Электрохимические процессы
Электрохимические процессы Статистична інтерпретація хвильової функції. (Лекція 4)
Статистична інтерпретація хвильової функції. (Лекція 4) Классификация очковых линз
Классификация очковых линз Презентация Вселенная
Презентация Вселенная Динамика материальной точки и поступательного движения твердого тела
Динамика материальной точки и поступательного движения твердого тела Структурный анализ механизма
Структурный анализ механизма Строительная механика пластин. Изгиб пластин
Строительная механика пластин. Изгиб пластин Статистические и термодинамические свойства макросистем
Статистические и термодинамические свойства макросистем Международная система единиц – СИ
Международная система единиц – СИ