- Структурный анализ механизма

Содержание
- 2. Требуется: 1. Построить структурную схему механизма; 2. Провести классификацию звеньев механизма; 3. Провести классификацию кинематических пар;
- 3. Решение 1. Структурная схема механизма
- 4. 2. Классификация звеньев механизма Таблица 1
- 5. (продолжение таблицы 1)
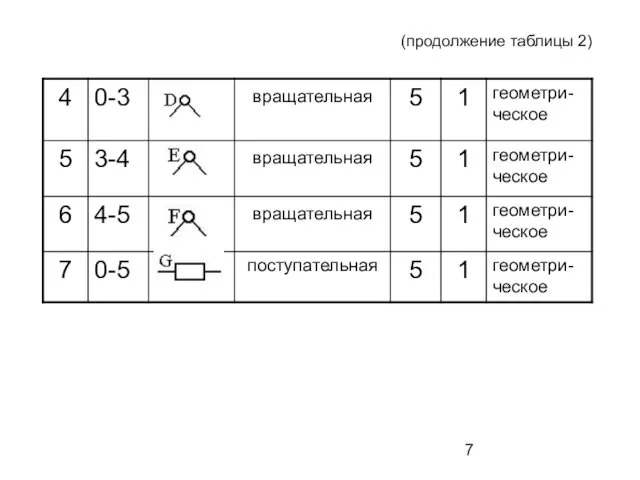
- 6. 3. Классификация кинематических пар Таблица 2 № звеньев, образующих пару Подвижность Класс Замыкание Условное обозначение
- 7. (продолжение таблицы 2)
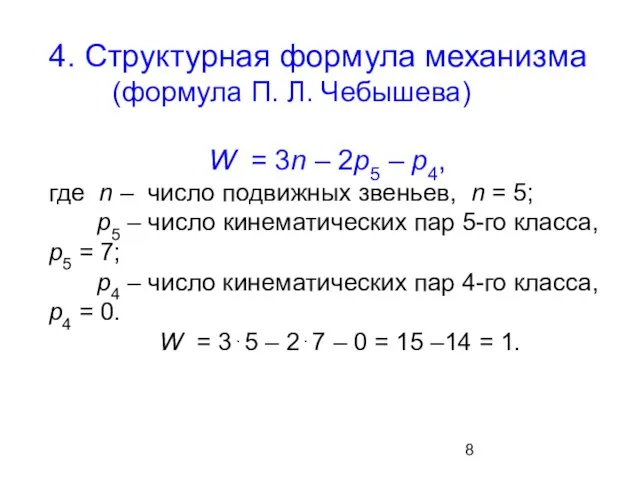
- 8. 4. Структурная формула механизма (формула П. Л. Чебышева) W = 3n – 2р5 – р4, где
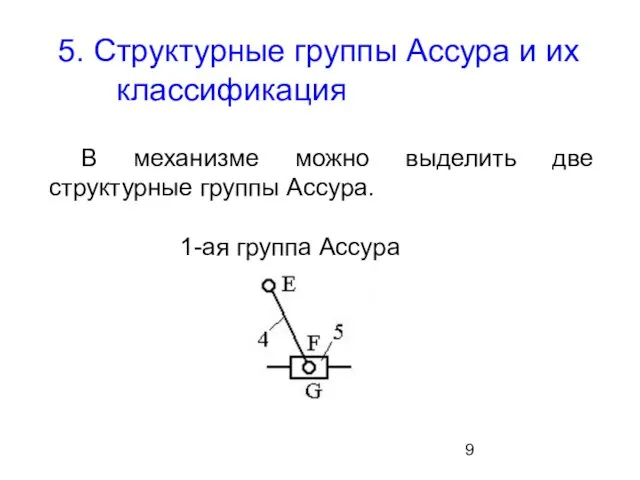
- 9. 5. Структурные группы Ассура и их классификация В механизме можно выделить две структурные группы Ассура. 1-ая
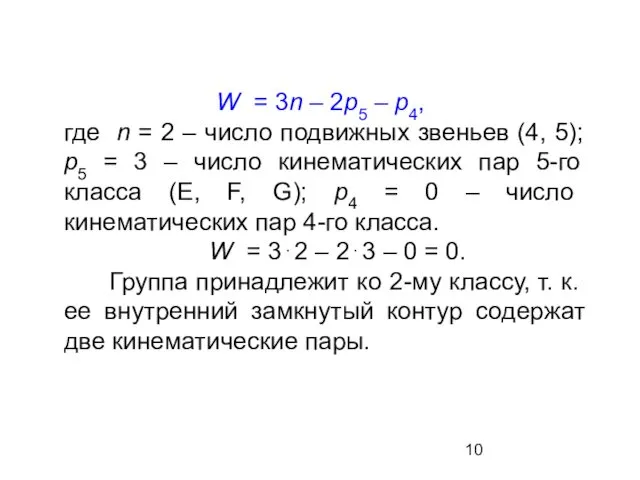
- 10. W = 3n – 2р5 – р4, где n = 2 – число подвижных звеньев (4,
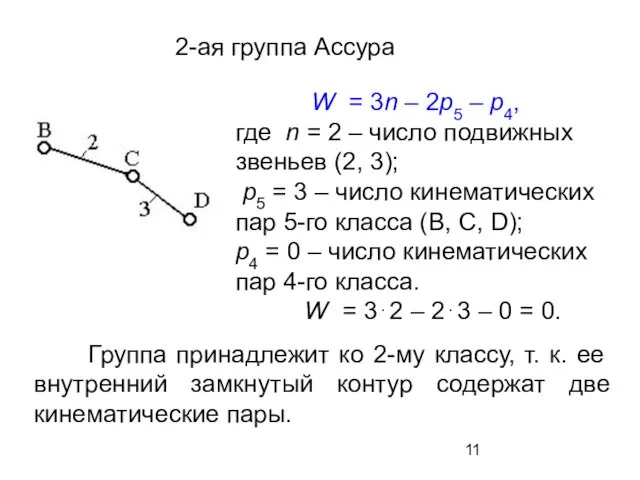
- 11. 2-ая группа Ассура W = 3n – 2р5 – р4, где n = 2 – число
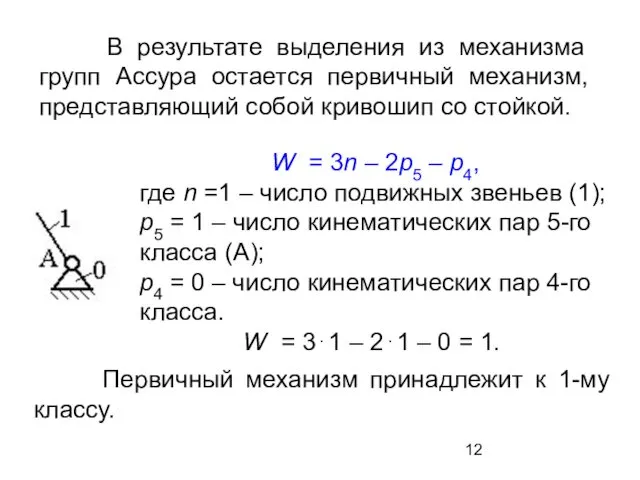
- 12. В результате выделения из механизма групп Ассура остается первичный механизм, представляющий собой кривошип со стойкой. W
- 14. Скачать презентацию
Требуется:
1. Построить структурную схему механизма;
2. Провести классификацию звеньев
Требуется:
1. Построить структурную схему механизма;
2. Провести классификацию звеньев
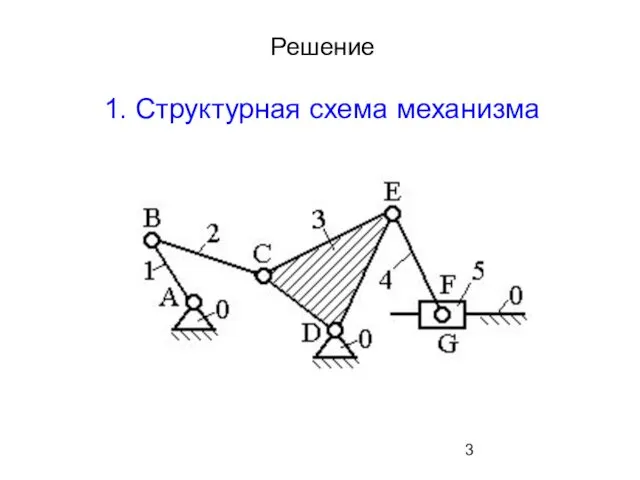
Решение
1. Структурная схема механизма
Решение
1. Структурная схема механизма
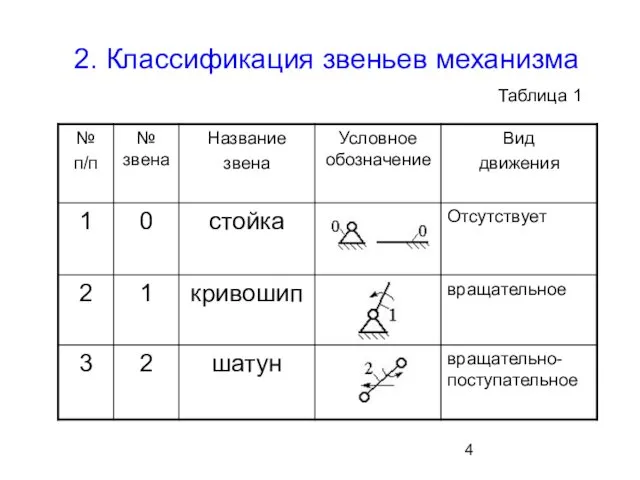
2. Классификация звеньев механизма
Таблица 1
2. Классификация звеньев механизма
Таблица 1
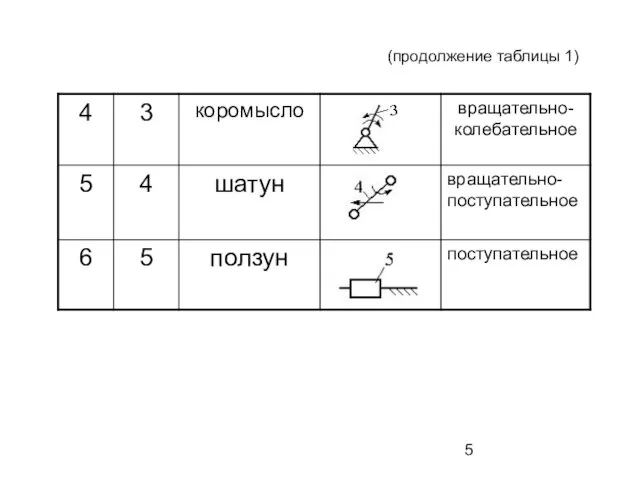
(продолжение таблицы 1)
(продолжение таблицы 1)

3. Классификация кинематических пар
Таблица 2
№ звеньев,
образующих
пару
Подвижность
Класс
Замыкание
Условное
обозначение
3. Классификация кинематических пар
Таблица 2
№ звеньев,
образующих
пару
Подвижность
Класс
Замыкание
Условное
обозначение
(продолжение таблицы 2)
(продолжение таблицы 2)
4. Структурная формула механизма (формула П. Л. Чебышева)
W =
4. Структурная формула механизма (формула П. Л. Чебышева)
W =
5. Структурные группы Ассура и их классификация
В механизме можно
5. Структурные группы Ассура и их классификация
В механизме можно
W = 3n – 2р5 – р4,
где n = 2
W = 3n – 2р5 – р4,
где n = 2
2-ая группа Ассура
W = 3n – 2р5 – р4,
где
2-ая группа Ассура
W = 3n – 2р5 – р4,
где
В результате выделения из механизма групп Ассура остается первичный механизм,
В результате выделения из механизма групп Ассура остается первичный механизм,
 Гидравлика. Физические свойства жидкостей
Гидравлика. Физические свойства жидкостей Жоғары жиілікті сыйымдылықты разрядтың
Жоғары жиілікті сыйымдылықты разрядтың Электронная система зажигания
Электронная система зажигания Переключательные схемы
Переключательные схемы Кинематика. Сложное движение точки. Сложное движение твердого тела
Кинематика. Сложное движение точки. Сложное движение твердого тела Действие жидкости и газа на погруженное в них тело
Действие жидкости и газа на погруженное в них тело Молекулярная физика и термодинамика
Молекулярная физика и термодинамика Подшипники скольжения
Подшипники скольжения Самоиндукция. Явление самоиндукции
Самоиндукция. Явление самоиндукции Напряженность электрического поля. Принцип суперпозиции полей
Напряженность электрического поля. Принцип суперпозиции полей Путь к известности
Путь к известности Звуковой резонанс
Звуковой резонанс Строение атома
Строение атома Зеркало
Зеркало Основы технических знаний. Физические основы работы полупроводниковых приборов. Лекция №4
Основы технических знаний. Физические основы работы полупроводниковых приборов. Лекция №4 Физические находки в историческом ракурсе
Физические находки в историческом ракурсе Электр тізбектеріндегі өтпелі үрдістер
Электр тізбектеріндегі өтпелі үрдістер Презентация по физикеРадиация - проблемы и перспективы
Презентация по физикеРадиация - проблемы и перспективы графики плавления и кристаллизации
графики плавления и кристаллизации Види і принципи роботи малих джерел електричного струму та їх утилізація
Види і принципи роботи малих джерел електричного струму та їх утилізація Химические реакторы. Гетерогенно-каталитические химические процессы. Лекция №12
Химические реакторы. Гетерогенно-каталитические химические процессы. Лекция №12 Электрические тали
Электрические тали Середня швидкість. Нерівномірний рух
Середня швидкість. Нерівномірний рух Электрический ток в жидкостях
Электрический ток в жидкостях Условия равновесия тел. Момент силы. Виды равновесия
Условия равновесия тел. Момент силы. Виды равновесия Мир физики
Мир физики Какие батарейки лучше
Какие батарейки лучше Измерение твердости материалов различными методами
Измерение твердости материалов различными методами