- Приведение системы сил к данному центру

Содержание
- 2. Опр. Точку, относительно которой берется момент силы называют моментной точкой (или центром момента). Различают следующие виды
- 3. Опр. Векторным моментом силы относительно центра О называется скалярная величина равная взятому с соответствующим знаком произведению
- 4. и знак минус – когда по ходу часовой стрелки Алгебраический момент имеет знак плюс, если сила
- 5. 2. Найти момент наклонной силы Примеры вычисления алгебраических моментов сил. 1. Найти моменты сил относительно точки
- 6. Опр. Проекция вектора относительно оси z равен алгебраическому моменту проекции этой силы на плоскость, перпендикулярную оси
- 7. Момент силы относительно оси равен 0, если сила лежит в одной плоскости с осью. Знак момента
- 8. Задание Задание По ребрам прямоугольного параллелепипеда направлены силы. Момент силы относительно оси ОХ равен... ВАРИАНТЫ ОТВЕТОВ:
- 9. Задание Задание Сила ВАРИАНТЫ ОТВЕТОВ: 1) F c sinα 2) F а sinα 4) F c
- 10. Система сил образующих пару сил, не находится в равновесии (эти силы не направлены вдоль одной прямой).
- 11. Виды момента пары. а) векторный момент; Различают следующие два вида моментов пары сил: б) алгебраический момент.
- 12. Выводы: В дальнейшем на чертеже пару сил будем изображать ее векторным моментом. 2. Две пары сил,
- 13. где – момент равнодействующей пары. Теоремы о сложении пар Теорема 1. Действие на твердое тело двух
- 14. При равновесии системы пар момент равнодействующей пары будет равен нулю, то есть Условие равновесия системы пар
- 15. Знак момента пары определяется также как и знак момента силы. Момент пары определяется по формуле m1
- 16. Задание Задание Даны пары сил, у которых F = 3Н, h = 6м, Q = 2Н,
- 17. Векторный момент этой пары Пусть на тело действует сила , приложенная в точке А. В Теорема
- 18. равная геометрической сумме моментов всех сил относительно центра О, называется главным моментом системы сил, то есть
- 19. Замеч1. Сила Заменим «ёжик» сил не является равнодействующей данной системы сил, так как заменяет систему сил
- 20. Частные случаи приведения системы сил к центру. Если для данной системы сил Замеч2. Значение сила то
- 22. Скачать презентацию

Опр. Точку, относительно которой берется момент силы называют моментной точкой (или
Опр. Точку, относительно которой берется момент силы называют моментной точкой (или

Опр. Векторным моментом силы
относительно центра О называется скалярная величина
Опр. Векторным моментом силы
относительно центра О называется скалярная величина

и знак минус – когда по ходу часовой стрелки
Алгебраический момент имеет
и знак минус – когда по ходу часовой стрелки
Алгебраический момент имеет

2. Найти момент наклонной
силы
Примеры вычисления алгебраических моментов сил.
1. Найти
2. Найти момент наклонной
силы
Примеры вычисления алгебраических моментов сил.
1. Найти

Опр. Проекция вектора
относительно оси z равен алгебраическому моменту проекции этой
Опр. Проекция вектора
относительно оси z равен алгебраическому моменту проекции этой

Момент силы относительно оси равен 0, если сила лежит в одной
Момент силы относительно оси равен 0, если сила лежит в одной

Задание
Задание
По ребрам прямоугольного параллелепипеда направлены силы.
Момент силы относительно оси ОХ равен...
ВАРИАНТЫ ОТВЕТОВ:
Задание
Задание
По ребрам прямоугольного параллелепипеда направлены силы.
Момент силы относительно оси ОХ равен...
ВАРИАНТЫ ОТВЕТОВ:

Задание
Задание
Сила
ВАРИАНТЫ ОТВЕТОВ:
1) F c sinα
2) F а sinα
4) F c cosα
Задание
Задание
Сила
ВАРИАНТЫ ОТВЕТОВ:
1) F c sinα
2) F а sinα
4) F c cosα

Система сил
образующих пару сил, не находится в равновесии (эти силы
Система сил
образующих пару сил, не находится в равновесии (эти силы

Виды момента пары.
а) векторный момент;
Различают следующие два вида моментов пары сил:
б)
Виды момента пары.
а) векторный момент;
Различают следующие два вида моментов пары сил:
б)

Выводы:
В дальнейшем на чертеже пару сил будем изображать ее векторным моментом.
2.
Выводы:
В дальнейшем на чертеже пару сил будем изображать ее векторным моментом.
2.

где
– момент равнодействующей пары.
Теоремы о сложении пар
Теорема 1. Действие на
где
– момент равнодействующей пары.
Теоремы о сложении пар
Теорема 1. Действие на

При равновесии системы пар момент равнодействующей пары будет равен нулю, то
При равновесии системы пар момент равнодействующей пары будет равен нулю, то

Знак момента пары определяется также как и знак момента силы. Момент
Знак момента пары определяется также как и знак момента силы. Момент

Задание
Задание
Даны пары сил, у которых F = 3Н, h = 6м,
Задание
Задание
Даны пары сил, у которых F = 3Н, h = 6м,

Векторный момент этой пары
Пусть на тело действует сила
, приложенная
Векторный момент этой пары
Пусть на тело действует сила
, приложенная

равная геометрической сумме моментов всех сил относительно центра О, называется
равная геометрической сумме моментов всех сил относительно центра О, называется

Замеч1. Сила
Заменим «ёжик» сил
не является равнодействующей данной системы сил, так
Замеч1. Сила
Заменим «ёжик» сил
не является равнодействующей данной системы сил, так

Частные случаи приведения системы сил к центру.
Если для данной системы сил
Частные случаи приведения системы сил к центру.
Если для данной системы сил
 Линейные антенные решетки
Линейные антенные решетки Энергия электрического поля. Тема 6
Энергия электрического поля. Тема 6 Элементы гемодинамики
Элементы гемодинамики Метрология. Допуски и посадки шпоночных и шлицевых соединений
Метрология. Допуски и посадки шпоночных и шлицевых соединений Динамика механической системы
Динамика механической системы тепловые явления в юрте
тепловые явления в юрте Силовий трансформатор ЧС-4
Силовий трансформатор ЧС-4 Особливості будови систем та механізмів автомобіля ГАЗ-66
Особливості будови систем та механізмів автомобіля ГАЗ-66 Введение. Общие сведения о машинах и механизмах
Введение. Общие сведения о машинах и механизмах Зубчатые передачи
Зубчатые передачи Теоретическая механика. Статика абсолютно твердого тела
Теоретическая механика. Статика абсолютно твердого тела Diesel and petrol power
Diesel and petrol power Буксирное устройство судна и его техническая эксплуатация
Буксирное устройство судна и его техническая эксплуатация Пневмотранспорт, виды и применение. Достоинства и недостатки. Тема 14
Пневмотранспорт, виды и применение. Достоинства и недостатки. Тема 14 Методическая разработка для урока по теме Поперечность световых волн.
Методическая разработка для урока по теме Поперечность световых волн. Разборка и сборка тормозных колодок автобуса ЛИАЗ-5256
Разборка и сборка тормозных колодок автобуса ЛИАЗ-5256 Блок - разновидность простого механизма
Блок - разновидность простого механизма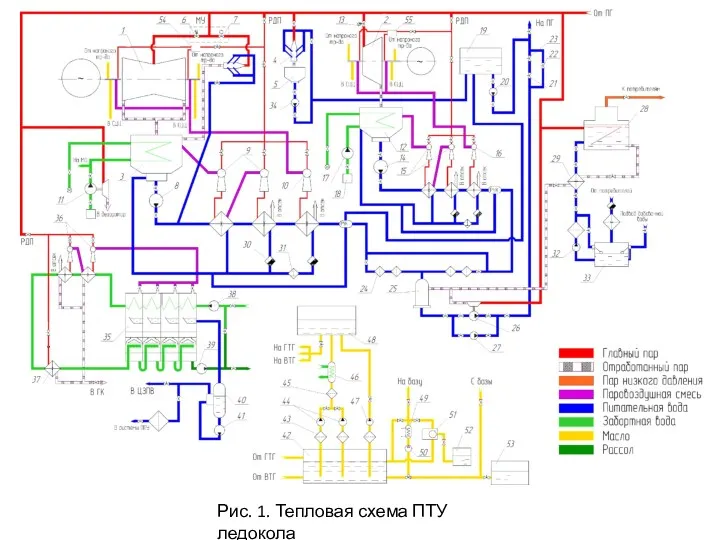 Системы ПТУ 2
Системы ПТУ 2 Гидродинамика. Поток жидкости и его основные понятия
Гидродинамика. Поток жидкости и его основные понятия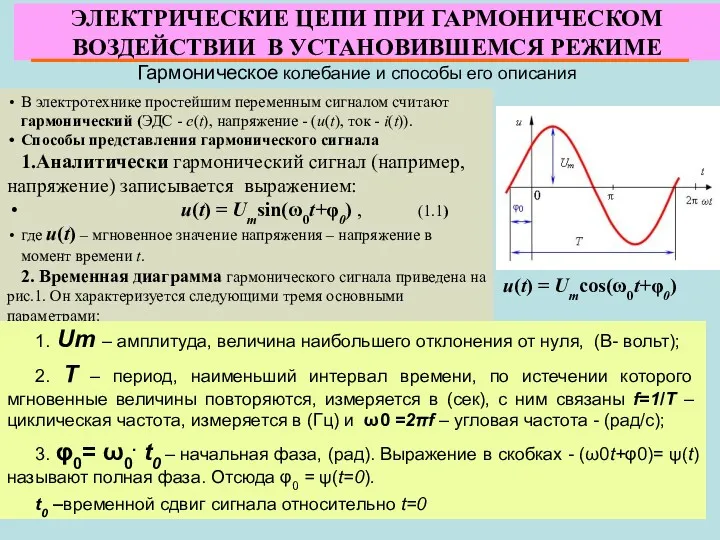 Электрические цепи при гармоническом воздействии в установившемся режиме
Электрические цепи при гармоническом воздействии в установившемся режиме Уравнение Менделеева - Клапейрона
Уравнение Менделеева - Клапейрона Урок по физике в 7классе на тему Плотность вещества. Решение задач
Урок по физике в 7классе на тему Плотность вещества. Решение задач Tiristor GTO
Tiristor GTO Электротехника. Резонанс в электрических цепях. (Лекция 9)
Электротехника. Резонанс в электрических цепях. (Лекция 9) Измерение параметров инфракрасного и терагерцового излучения ч.2 Схемы измерения параметров
Измерение параметров инфракрасного и терагерцового излучения ч.2 Схемы измерения параметров Спектры. Виды спектров
Спектры. Виды спектров Инструментальные методы анализа
Инструментальные методы анализа Реализация проблемного метода обучения на уроках физики с помощью интерактивных компьютерных моделей
Реализация проблемного метода обучения на уроках физики с помощью интерактивных компьютерных моделей