- Профилирование кулачков. Кинематика кулачковых механизмов. (Лекция 19)

Содержание
- 2. Аналитический способ определения центрового профиля кулачка Задача - построение профиля кулачка (центрового, конструктивного) обеспечивающего заданное движение
- 3. Расчетная схема
- 4. Координаты текущей точки : на центровом профиле (в развернутом положении точка ) в полярной системе координат
- 5. Полярный угол точки Углы – корректирующие (вспомогательные) углы. Для каждого положения толкателя из по теореме косинусов
- 6. Определение координат конструктивного профиля кулачка Конструктивный или действительный профиль кулачка – профиль, по которому обкатывается ролик
- 7. Расчетная схема для определения координат точек конструктивного профиля кулачка
- 8. Координаты текущей точки С на конструктивном профиле (в развернутом на угол положении точка ) в полярной
- 9. Полярная координата конструктивного профиля Из , т.е.
- 10. Кинематика кулачковых механизмов Цель кинематического исследования кулачкового механизма – определение функции положения , первой и второй
- 11. Метод обращенного движения: Исследуемому механизму вместе со стойкой мысленно сообщают вращательное движение вокруг оси вращения кулачка
- 12. Графическое построение функции положения
- 13. Требования ко второй передаточной функции В конце фазы удаления т.е. при В фазе удаления (и возврата)
- 14. Законы движения толкателя в фазе удаления
- 15. Графо-аналитический метод кинематического анализа Кулачковый механизм с роликовым качающимся толкателем
- 16. Векторные уравнения определяющие связь между скоростями звеньев или Векторное уравнение, дающее связь между ускорениями – нормальное
- 17. – повернутый план скоростей, построенный в масштабе Величины скоростей: где Тогда
- 19. Скачать презентацию
Аналитический способ определения центрового профиля кулачка
Задача - построение профиля кулачка (центрового,
Аналитический способ определения центрового профиля кулачка
Задача - построение профиля кулачка (центрового,
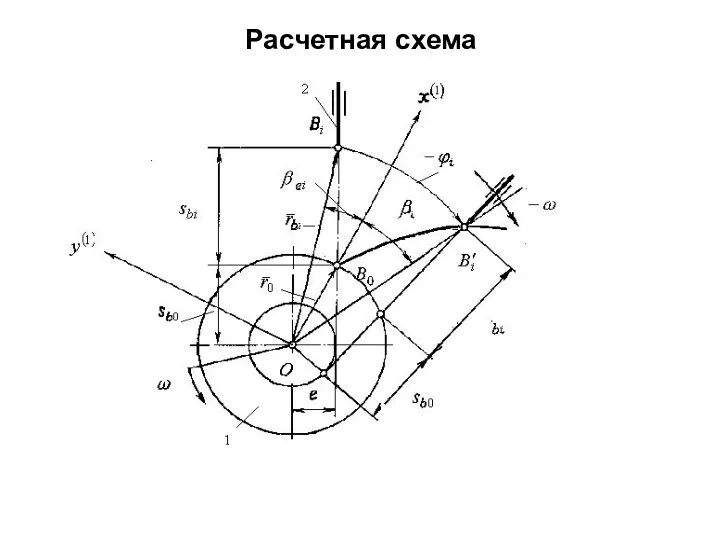
Расчетная схема
Расчетная схема
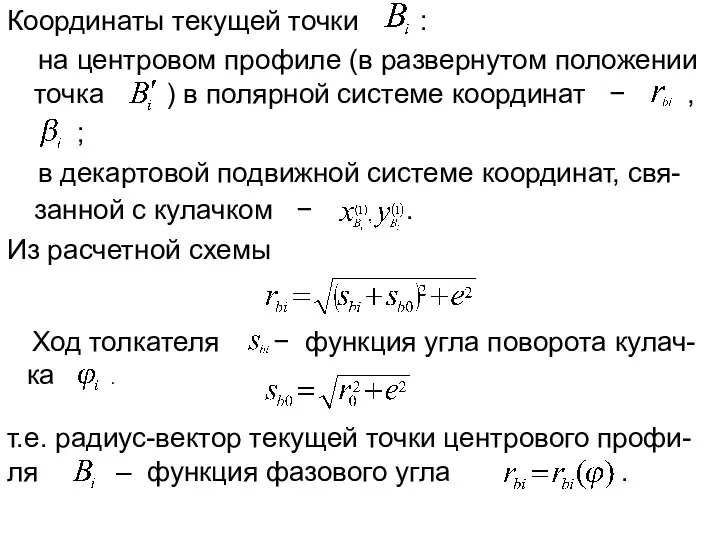
Координаты текущей точки :
на центровом профиле (в развернутом положении точка
Координаты текущей точки :
на центровом профиле (в развернутом положении точка
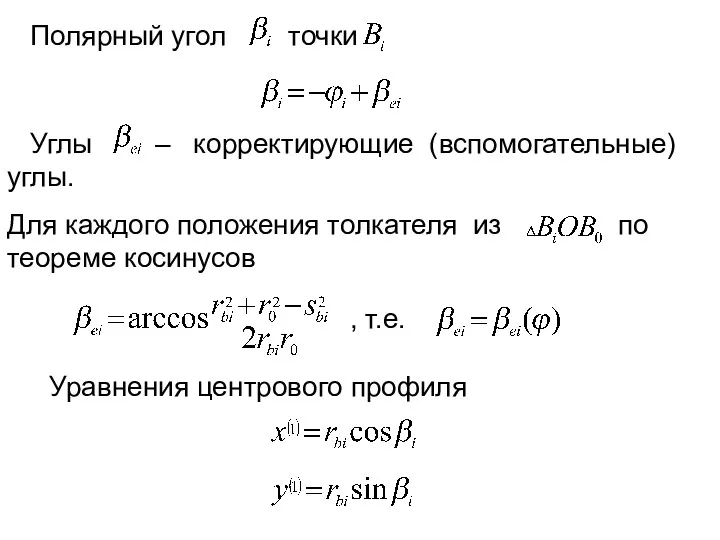
Полярный угол точки
Углы – корректирующие (вспомогательные) углы.
Для
Полярный угол точки
Углы – корректирующие (вспомогательные) углы.
Для
Определение координат конструктивного профиля кулачка
Конструктивный или действительный профиль кулачка –
Определение координат конструктивного профиля кулачка
Конструктивный или действительный профиль кулачка –
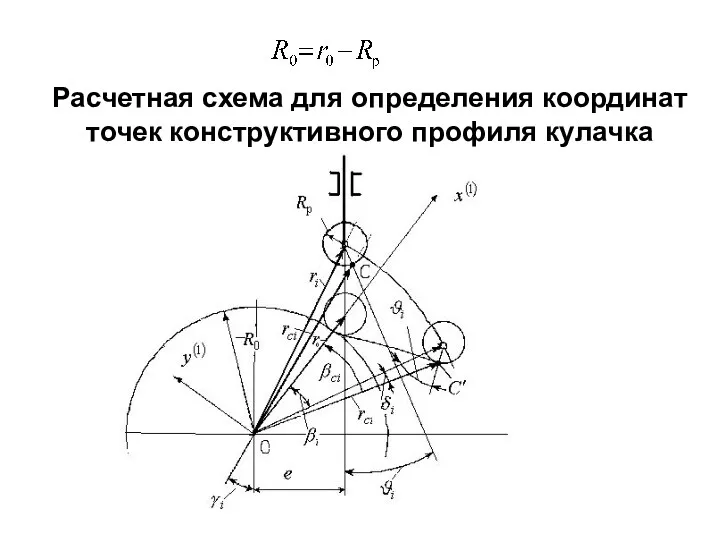
Расчетная схема для определения координат точек конструктивного профиля кулачка
Расчетная схема для определения координат точек конструктивного профиля кулачка
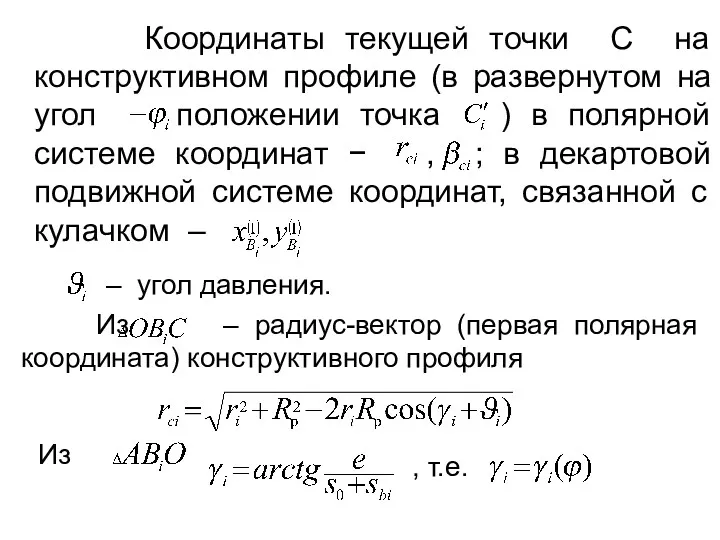
Координаты текущей точки С на конструктивном профиле (в развернутом на
Координаты текущей точки С на конструктивном профиле (в развернутом на
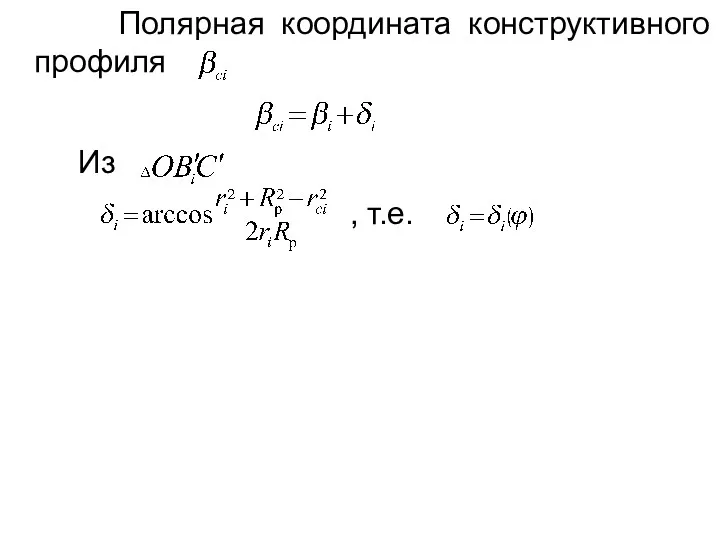
Полярная координата конструктивного профиля
Из
, т.е.
Полярная координата конструктивного профиля
Из
, т.е.
Кинематика кулачковых механизмов
Цель кинематического исследования кулачкового механизма – определение функции
Кинематика кулачковых механизмов
Цель кинематического исследования кулачкового механизма – определение функции
Метод обращенного движения:
Исследуемому механизму вместе со стойкой мысленно сообщают вращательное
Метод обращенного движения:
Исследуемому механизму вместе со стойкой мысленно сообщают вращательное
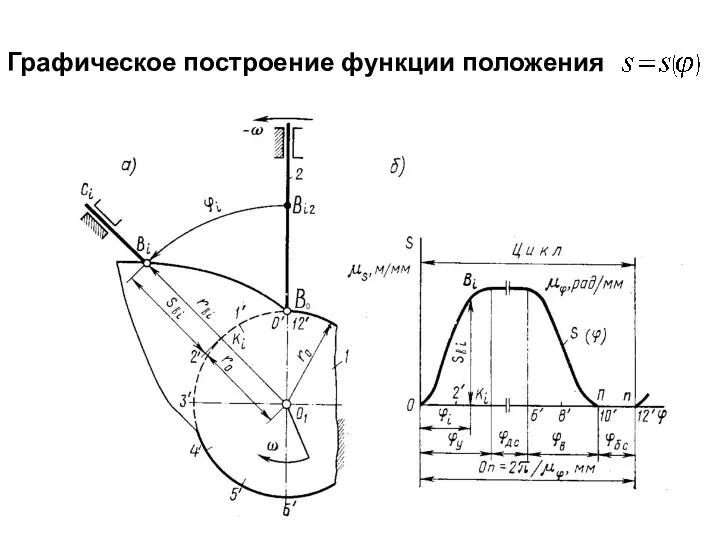
Графическое построение функции положения
Графическое построение функции положения
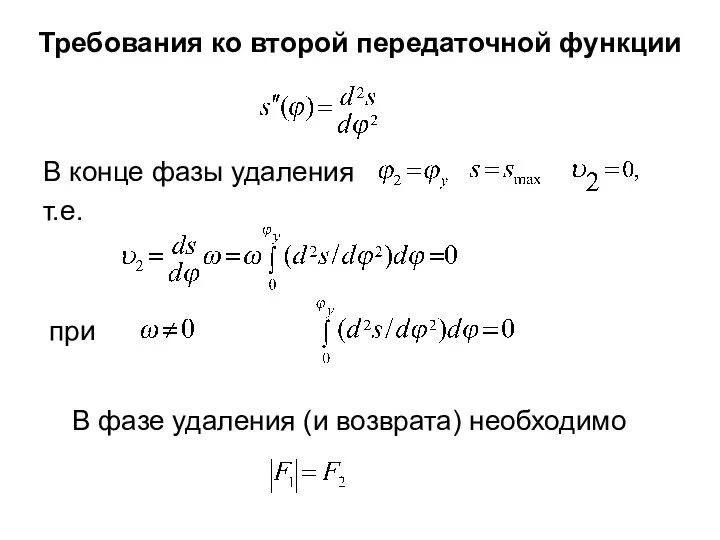
Требования ко второй передаточной функции
В конце фазы удаления
т.е.
при
В фазе удаления (и
Требования ко второй передаточной функции
В конце фазы удаления
т.е.
при
В фазе удаления (и

Законы движения толкателя в фазе удаления
Законы движения толкателя в фазе удаления
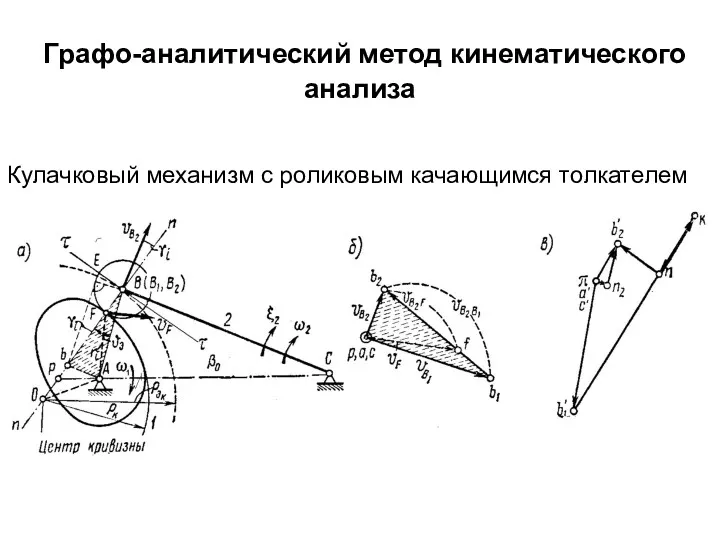
Графо-аналитический метод кинематического анализа
Кулачковый механизм с роликовым качающимся толкателем
Графо-аналитический метод кинематического анализа
Кулачковый механизм с роликовым качающимся толкателем
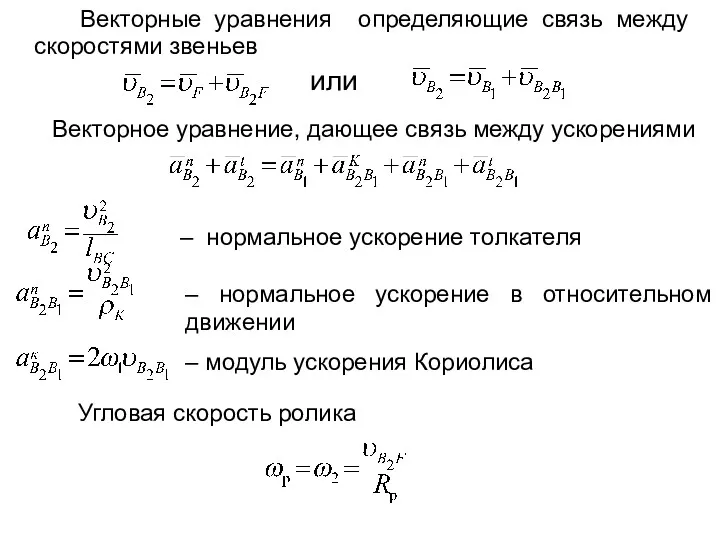
Векторные уравнения определяющие связь между скоростями звеньев
или
Векторное уравнение, дающее
Векторные уравнения определяющие связь между скоростями звеньев
или
Векторное уравнение, дающее
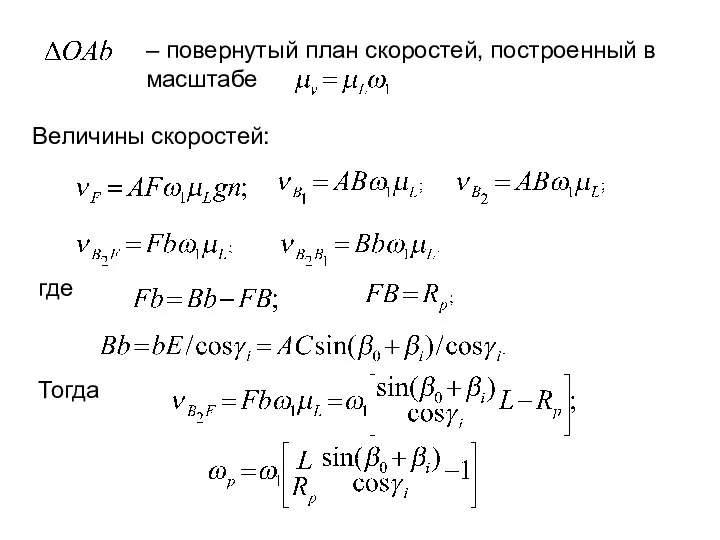
– повернутый план скоростей, построенный в масштабе
Величины скоростей:
– повернутый план скоростей, построенный в масштабе
Величины скоростей:
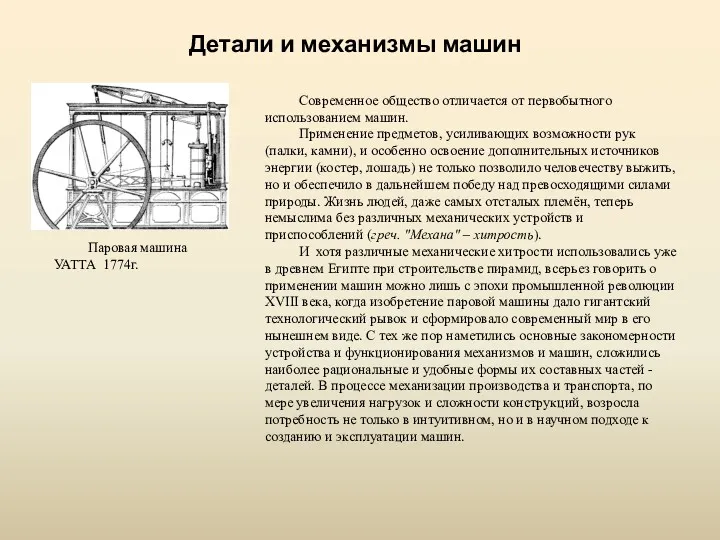 Детали и механизмы машин. Паровая машина
Детали и механизмы машин. Паровая машина Механические характеристики металлов
Механические характеристики металлов Электротехника и электроника
Электротехника и электроника Уравнения электродинамики для направляемых волн. Лекция 10
Уравнения электродинамики для направляемых волн. Лекция 10 Презентация Легенда об Архимеде
Презентация Легенда об Архимеде Справочник по физике
Справочник по физике Вільне падіння. Прискорення вільного падіння
Вільне падіння. Прискорення вільного падіння Здоровьесберегающие технологии на уроках физики в 10-11 классах
Здоровьесберегающие технологии на уроках физики в 10-11 классах Датчики давления
Датчики давления Архимед күші
Архимед күші Детали и соединения в технической механике
Детали и соединения в технической механике Определение свободной поверхностной энергии тонких пленок оксидов
Определение свободной поверхностной энергии тонких пленок оксидов Действия электрического тока
Действия электрического тока Механика. Внутренние силы
Механика. Внутренние силы Тест. Распространение колебаний в среде. Волны. Продольные и поперечные волны
Тест. Распространение колебаний в среде. Волны. Продольные и поперечные волны Мирный атом. АЭС
Мирный атом. АЭС Презентация к уроку физики в 7 классе
Презентация к уроку физики в 7 классе Люди нашего края Голобоков
Люди нашего края Голобоков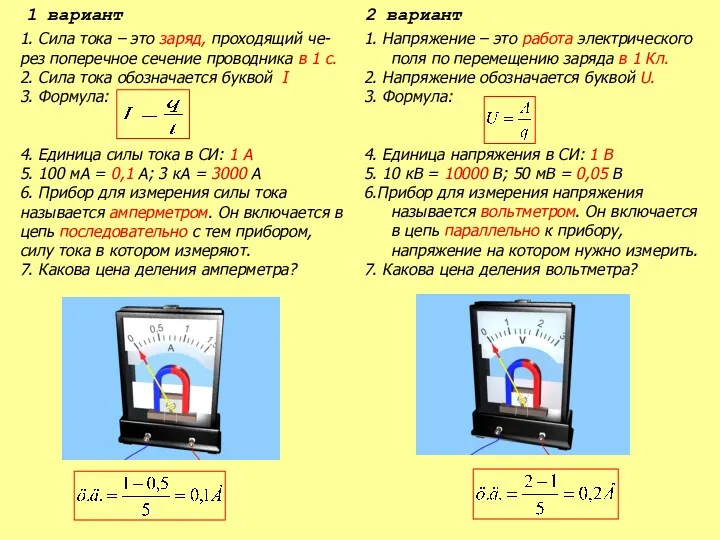 Зависимость силы тока от напряжения. Сопротивление проводника
Зависимость силы тока от напряжения. Сопротивление проводника Тесты по физике для обучающихся
Тесты по физике для обучающихся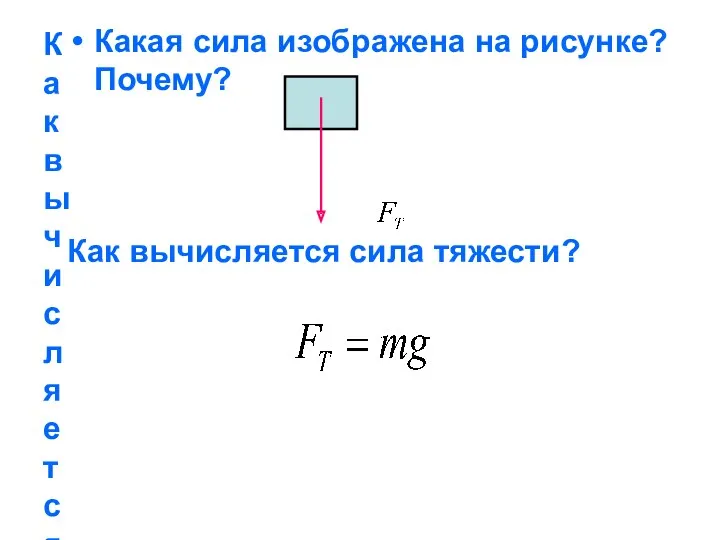 Чему равна сила упругости?
Чему равна сила упругости? Лазеры
Лазеры Цепные передачи
Цепные передачи Газовые законы
Газовые законы Спектры. Качественные задачи
Спектры. Качественные задачи Квазиклассическая теория динамики электрона. Кинетическая теория Больцмана
Квазиклассическая теория динамики электрона. Кинетическая теория Больцмана Звуковые волны
Звуковые волны Основные законы динамики материальной точки (лекция № 2)
Основные законы динамики материальной точки (лекция № 2)