- Радиолокация. История развития радиолокации

Содержание
- 2. Радиолокация (от латинских слов «radio» -излучаю и «lokatio» – расположение) Радиолокация – обнаружение и точное определение
- 3. В сентябре 1922 г . в США, Х.Тейлор и Л. Янг проводили опыты по радиосвязи на
- 4. Шотландский физик Роберт Уотсон-Уатт первый в 1935 г. построил радарную установку, способную обнаружить самолеты на расстоянии
- 5. Первые опытные установки 3 января 1934 года в СССР был успешно проведён эксперимент по обнаружению самолёта
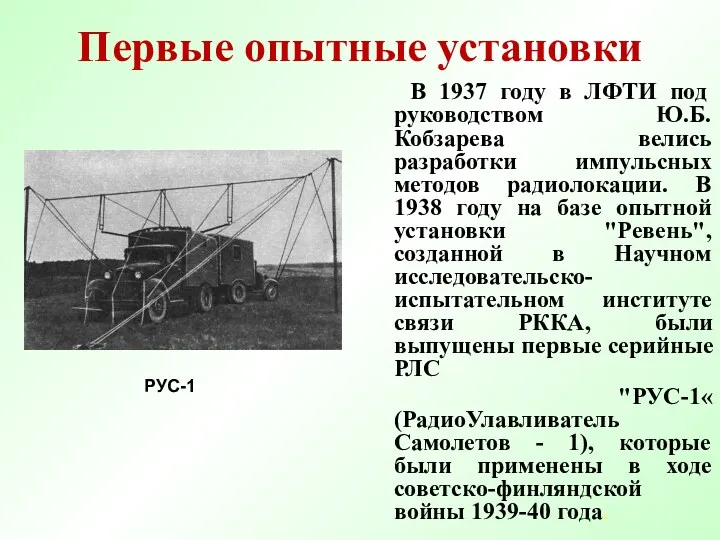
- 6. Первые опытные установки В 1937 году в ЛФТИ под руководством Ю.Б.Кобзарева велись разработки импульсных методов радиолокации.
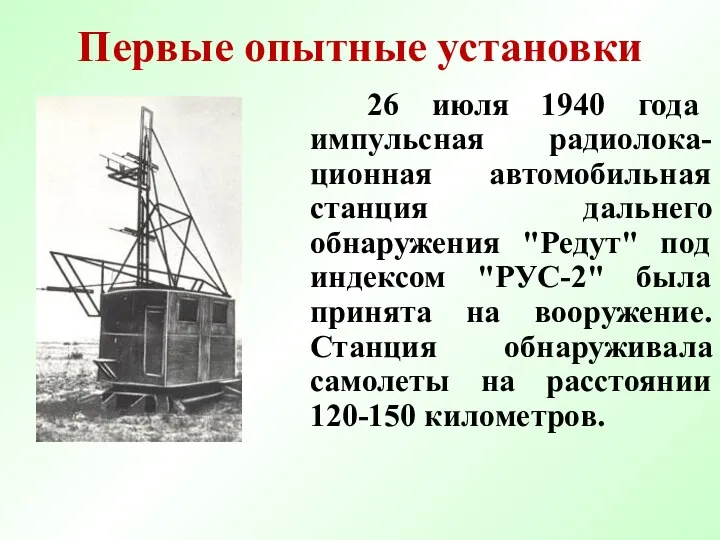
- 7. Первые опытные установки 26 июля 1940 года импульсная радиолока-ционная автомобильная станция дальнего обнаружения "Редут" под индексом
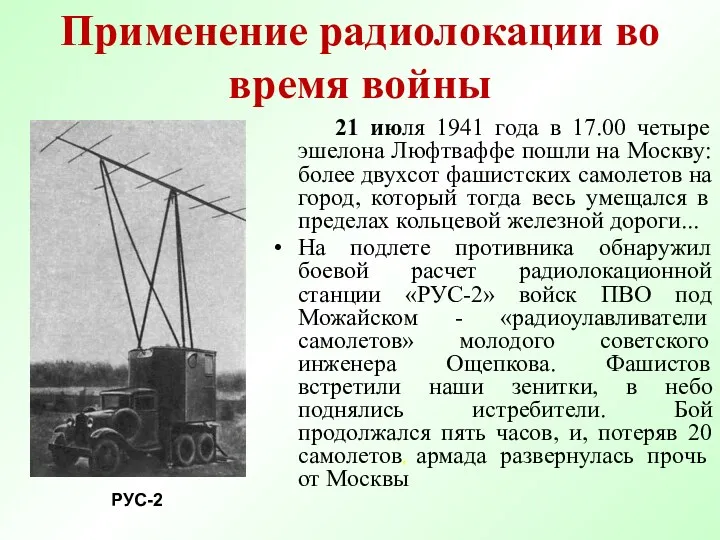
- 8. Применение радиолокации во время войны 21 июля 1941 года в 17.00 четыре эшелона Люфтваффе пошли на
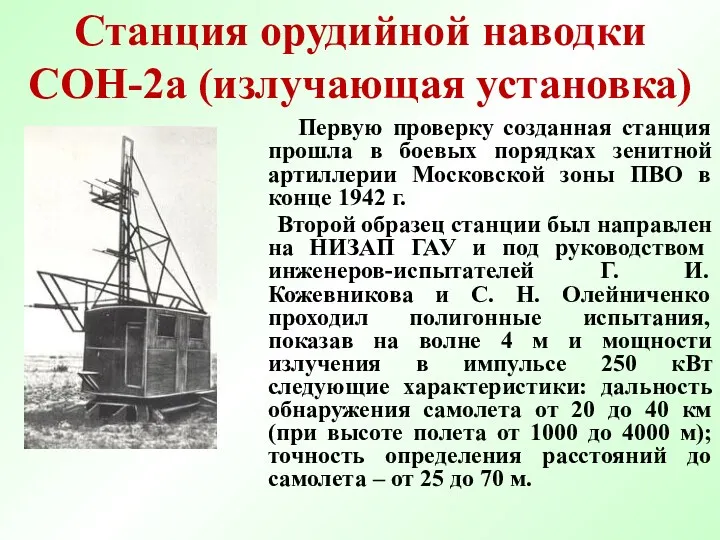
- 9. Станция орудийной наводки СОН-2a (излучающая установка) Первую проверку созданная станция прошла в боевых порядках зенитной артиллерии
- 10. Эффективность применения СОН -2а …Бомбардировщики 2-й воздушной армии люфтваффе шли на Москву с юго-запада со стороны
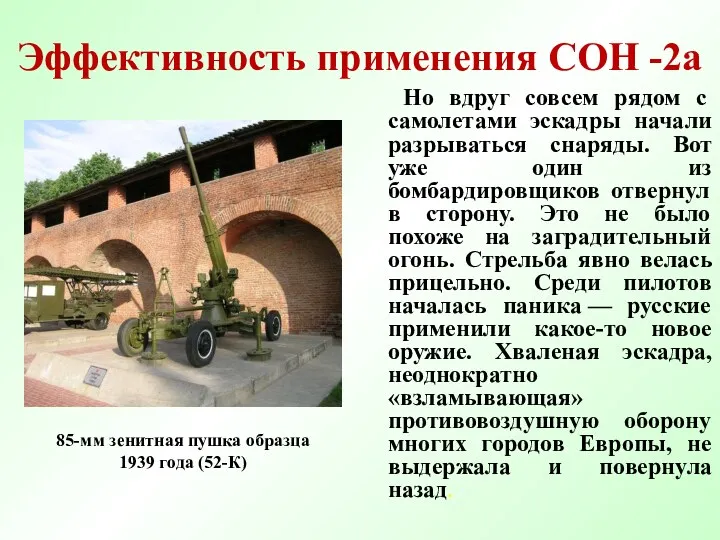
- 11. Эффективность применения СОН -2а Но вдруг совсем рядом с самолетами эскадры начали разрываться снаряды. Вот уже
- 12. Промышленное производство приборов радиообнаружения 17 января 1942 г. ГАУ и Наркомат электропромышленности (НКЭП) СССР совместно внесли
- 13. Выделяют два вида радиолокации: Пассивная радиолокация основана на приёме собственного излучения объекта ; Активная радиолокация: радар
- 14. Радиолокация основана на явлении отражения радиоволн от различных объектов. Заметное отражение возможно от объектов в том
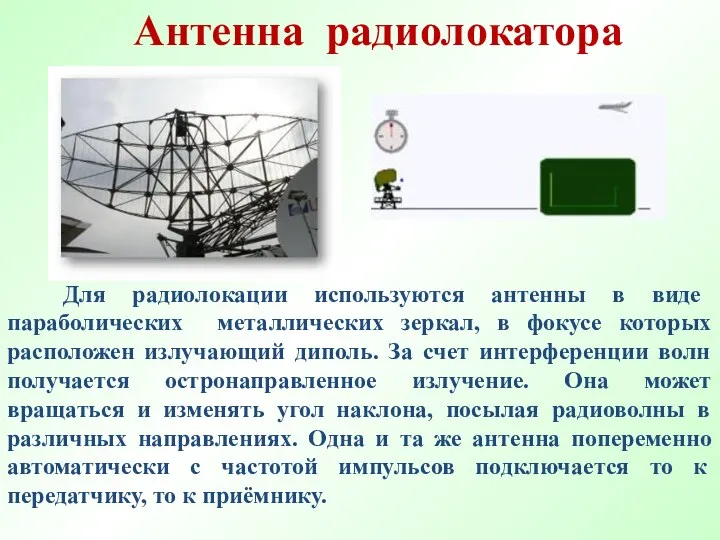
- 15. Антенна радиолокатора Для радиолокации используются антенны в виде параболических металлических зеркал, в фокусе которых расположен излучающий
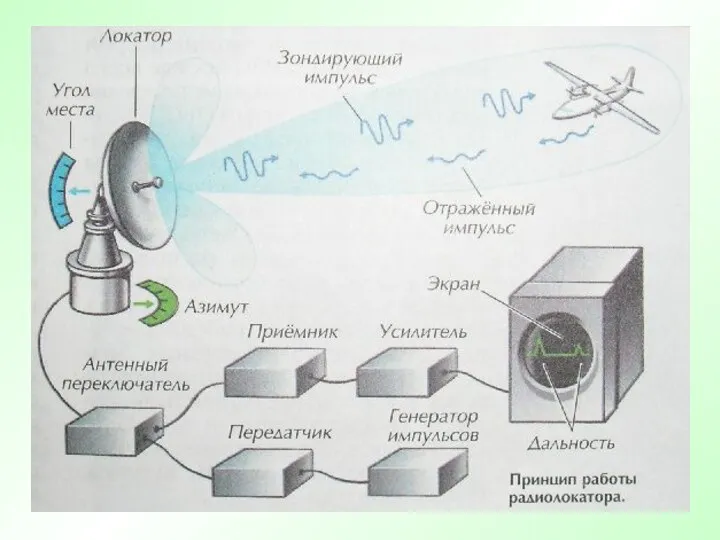
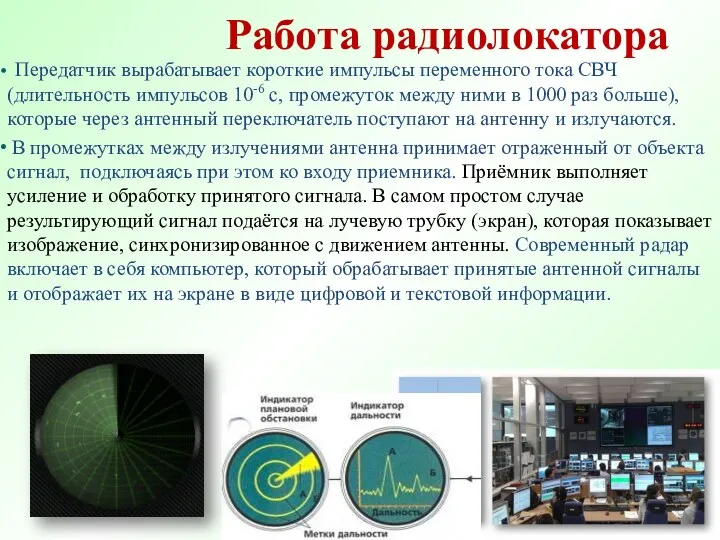
- 17. Работа радиолокатора Передатчик вырабатывает короткие импульсы переменного тока СВЧ (длительность импульсов 10-6 с, промежуток между ними
- 18. S – расстояние до объекта, t – время распространения радиоимпульса к объекту и обратно Определение расстояния
- 19. . . .Различные РЛС… например такие огромные . . .
- 20. . . . передвижные . . .
- 21. . . . ну и совсем портативные.
- 22. По сигналам на экранах радиолокаторов диспетчеры аэропортов контролируют движение самолётов по воздушным трассам, а пилоты точно
- 23. Главная задача - наблюдать за воздушным пространством, обнаружить и вести цель, в случае необходимости навести на
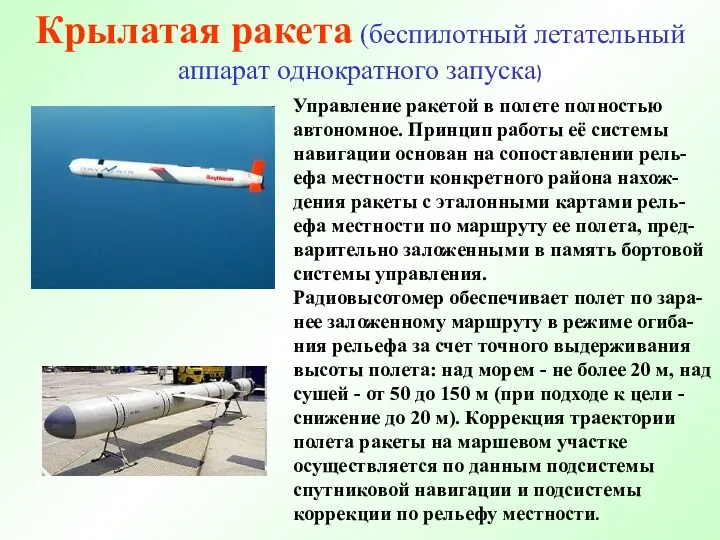
- 24. Крылатая ракета (беспилотный летательный аппарат однократного запуска) Управление ракетой в полете полностью автономное. Принцип работы её
- 25. «Стелс»-технология уменьшает вероятность того, что самолет будет запеленгован противником. Поверхность самолёта собрана из нескольких тысяч плоских
- 26. Одним из важных методов снижения аварийности является контроль скоростного режима движения автотранспорта на дорогах. Первыми гражданскими
- 27. Метеорологические радиолокаторы для прогнозирования погоды. Объектами радиолокационного обнаружения могут быть облака, осадки, грозовые очаги. Можно прогнозировать
- 28. Применение в космосе В космических исследованиях радиолокаторы применяются для управления полётом и слежения за спутниками, межпланетными
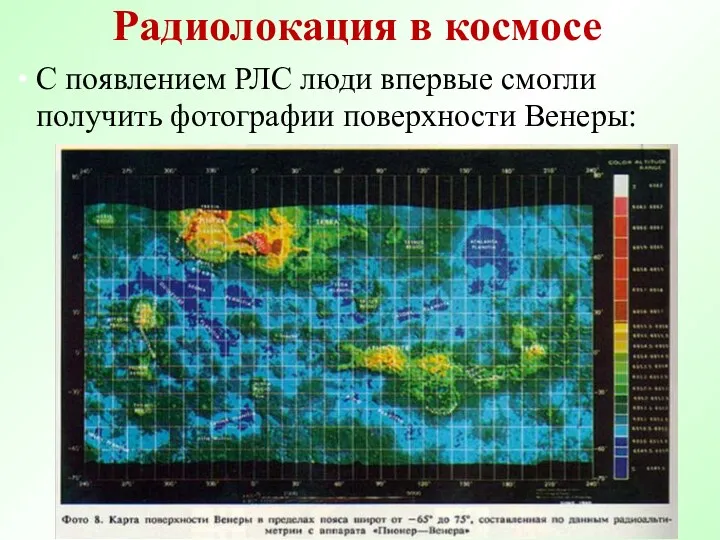
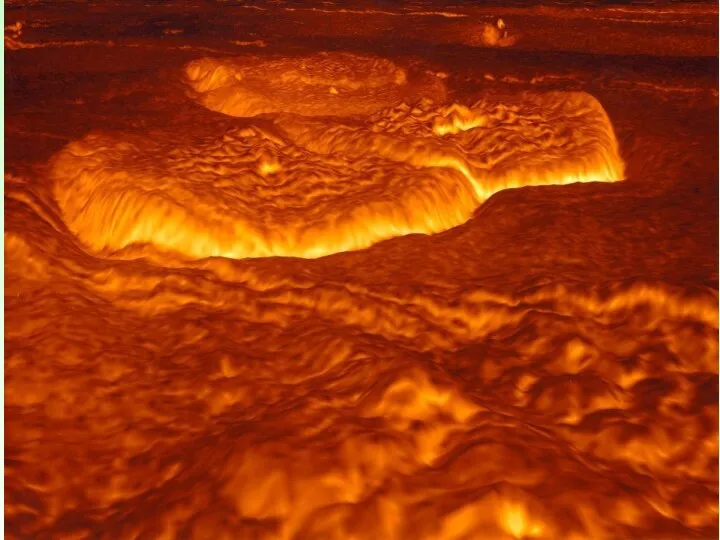
- 29. Радиолокация в космосе С появлением РЛС люди впервые смогли получить фотографии поверхности Венеры: . . .
- 32. Радиолокация в устранении экологических катастроф
- 33. Что называется радиолокацией? Какие явления лежат в основе радиолокации? Почему передатчик радиолокационной установки должен излучать волны
- 35. Скачать презентацию
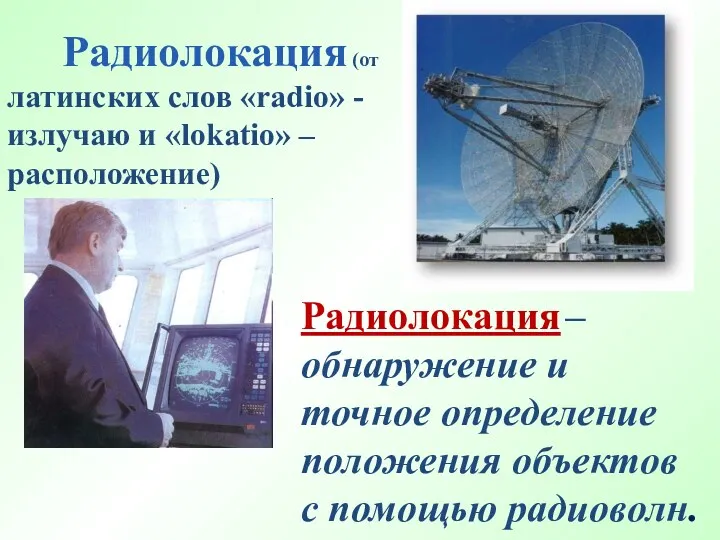
Радиолокация (от латинских слов «radio» -излучаю и «lokatio» – расположение)
Радиолокация (от латинских слов «radio» -излучаю и «lokatio» – расположение)
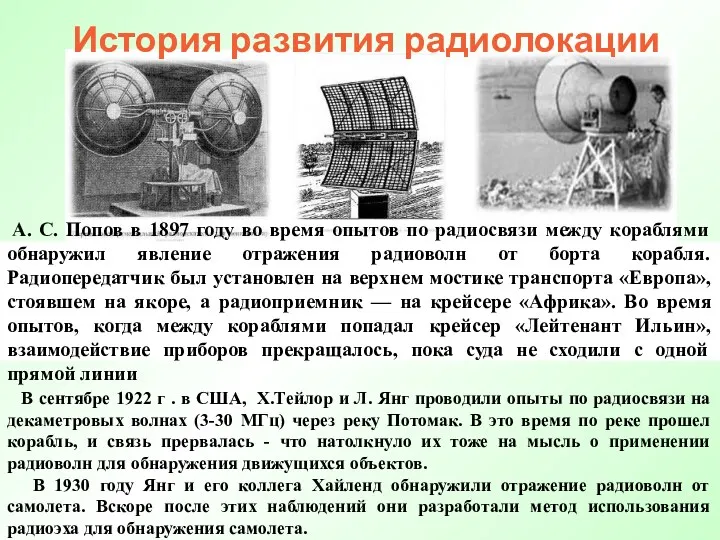
В сентябре 1922 г . в США, Х.Тейлор и Л.
В сентябре 1922 г . в США, Х.Тейлор и Л.
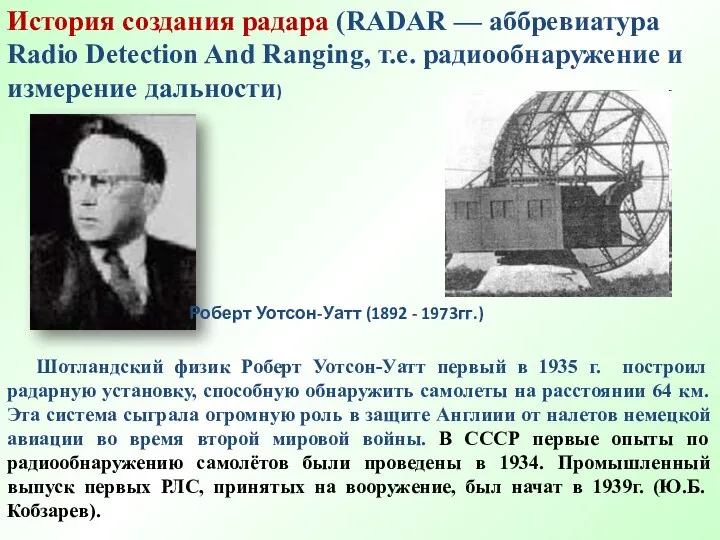
Шотландский физик Роберт Уотсон-Уатт первый в 1935 г. построил радарную установку,
Первые опытные установки
3 января 1934 года в СССР был успешно
Первые опытные установки
3 января 1934 года в СССР был успешно
Первые опытные установки
В 1937 году в ЛФТИ под руководством Ю.Б.Кобзарева
Первые опытные установки
В 1937 году в ЛФТИ под руководством Ю.Б.Кобзарева
Первые опытные установки
26 июля 1940 года импульсная радиолока-ционная автомобильная станция
Первые опытные установки
26 июля 1940 года импульсная радиолока-ционная автомобильная станция
Применение радиолокации во время войны
21 июля 1941 года в 17.00
Применение радиолокации во время войны
21 июля 1941 года в 17.00
Станция орудийной наводки СОН-2a (излучающая установка)
Первую проверку созданная станция прошла
Станция орудийной наводки СОН-2a (излучающая установка)
Первую проверку созданная станция прошла
Эффективность применения СОН -2а
…Бомбардировщики 2-й воздушной армии люфтваффе шли на
Эффективность применения СОН -2а
…Бомбардировщики 2-й воздушной армии люфтваффе шли на
Эффективность применения СОН -2а
Но вдруг совсем рядом с самолетами эскадры
Эффективность применения СОН -2а
Но вдруг совсем рядом с самолетами эскадры
Промышленное производство приборов радиообнаружения
17 января 1942 г. ГАУ и Наркомат электропромышленности (НКЭП)
Промышленное производство приборов радиообнаружения
17 января 1942 г. ГАУ и Наркомат электропромышленности (НКЭП)
Выделяют два вида радиолокации:
Пассивная радиолокация основана на приёме собственного излучения объекта
Выделяют два вида радиолокации:
Пассивная радиолокация основана на приёме собственного излучения объекта
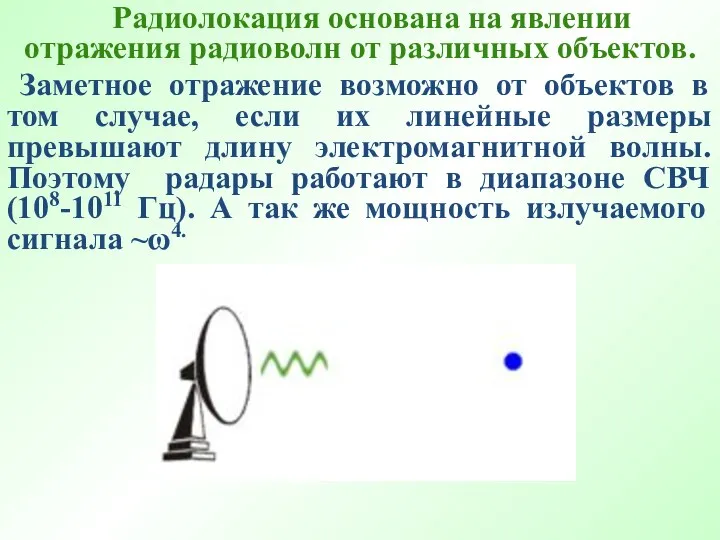
Радиолокация основана на явлении отражения радиоволн от различных объектов.
Радиолокация основана на явлении отражения радиоволн от различных объектов.
Антенна радиолокатора
Для радиолокации используются антенны в виде параболических металлических зеркал,
Антенна радиолокатора
Для радиолокации используются антенны в виде параболических металлических зеркал,
Работа радиолокатора
Передатчик вырабатывает короткие импульсы переменного тока СВЧ (длительность импульсов
Работа радиолокатора
Передатчик вырабатывает короткие импульсы переменного тока СВЧ (длительность импульсов
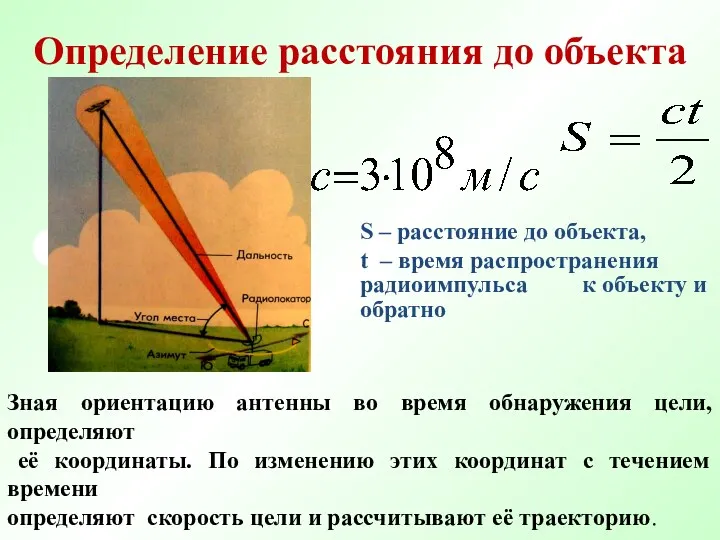
S – расстояние до объекта,
t – время распространения радиоимпульса к объекту
S – расстояние до объекта,
t – время распространения радиоимпульса к объекту

. . .Различные РЛС… например такие огромные . . .
. . .Различные РЛС… например такие огромные . . .

. . . передвижные . . .
. . . передвижные . . .

. . . ну и совсем портативные.
. . . ну и совсем портативные.

По сигналам на экранах радиолокаторов диспетчеры аэропортов контролируют движение самолётов по
По сигналам на экранах радиолокаторов диспетчеры аэропортов контролируют движение самолётов по

Главная задача - наблюдать за воздушным пространством, обнаружить и вести
Главная задача - наблюдать за воздушным пространством, обнаружить и вести
Крылатая ракета (беспилотный летательный аппарат однократного запуска)
Управление ракетой в полете полностью
Крылатая ракета (беспилотный летательный аппарат однократного запуска)
Управление ракетой в полете полностью
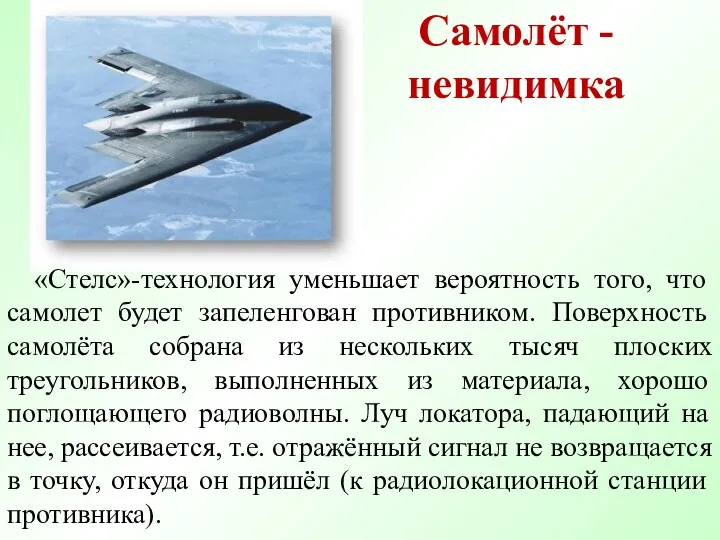
«Стелс»-технология уменьшает вероятность того, что самолет будет запеленгован противником. Поверхность
«Стелс»-технология уменьшает вероятность того, что самолет будет запеленгован противником. Поверхность

Одним из важных методов снижения аварийности является контроль скоростного режима
Одним из важных методов снижения аварийности является контроль скоростного режима
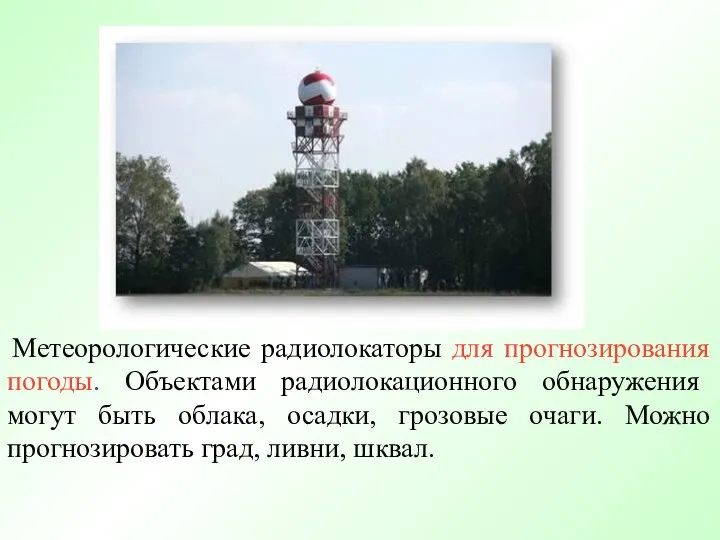
Метеорологические радиолокаторы для прогнозирования погоды. Объектами радиолокационного обнаружения могут быть
Метеорологические радиолокаторы для прогнозирования погоды. Объектами радиолокационного обнаружения могут быть

Применение в космосе
В космических исследованиях радиолокаторы применяются для управления полётом
Применение в космосе
В космических исследованиях радиолокаторы применяются для управления полётом
Радиолокация в космосе
С появлением РЛС люди впервые смогли получить фотографии поверхности
Радиолокация в космосе
С появлением РЛС люди впервые смогли получить фотографии поверхности


Радиолокация в устранении экологических катастроф
Радиолокация в устранении экологических катастроф
Что называется радиолокацией?
Какие явления лежат в основе радиолокации?
Почему передатчик
Что называется радиолокацией?
Какие явления лежат в основе радиолокации?
Почему передатчик
 Линейные антенные решетки
Линейные антенные решетки Энергия электрического поля. Тема 6
Энергия электрического поля. Тема 6 Элементы гемодинамики
Элементы гемодинамики Метрология. Допуски и посадки шпоночных и шлицевых соединений
Метрология. Допуски и посадки шпоночных и шлицевых соединений Динамика механической системы
Динамика механической системы тепловые явления в юрте
тепловые явления в юрте Силовий трансформатор ЧС-4
Силовий трансформатор ЧС-4 Особливості будови систем та механізмів автомобіля ГАЗ-66
Особливості будови систем та механізмів автомобіля ГАЗ-66 Введение. Общие сведения о машинах и механизмах
Введение. Общие сведения о машинах и механизмах Зубчатые передачи
Зубчатые передачи Теоретическая механика. Статика абсолютно твердого тела
Теоретическая механика. Статика абсолютно твердого тела Diesel and petrol power
Diesel and petrol power Буксирное устройство судна и его техническая эксплуатация
Буксирное устройство судна и его техническая эксплуатация Пневмотранспорт, виды и применение. Достоинства и недостатки. Тема 14
Пневмотранспорт, виды и применение. Достоинства и недостатки. Тема 14 Методическая разработка для урока по теме Поперечность световых волн.
Методическая разработка для урока по теме Поперечность световых волн. Разборка и сборка тормозных колодок автобуса ЛИАЗ-5256
Разборка и сборка тормозных колодок автобуса ЛИАЗ-5256 Блок - разновидность простого механизма
Блок - разновидность простого механизма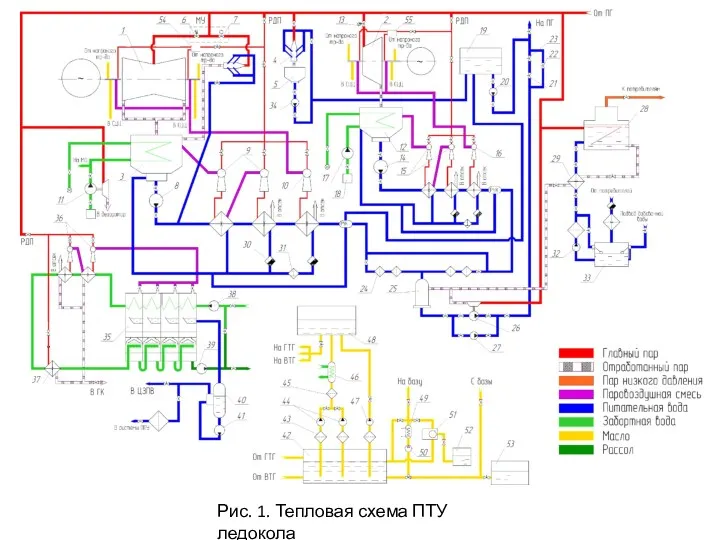 Системы ПТУ 2
Системы ПТУ 2 Гидродинамика. Поток жидкости и его основные понятия
Гидродинамика. Поток жидкости и его основные понятия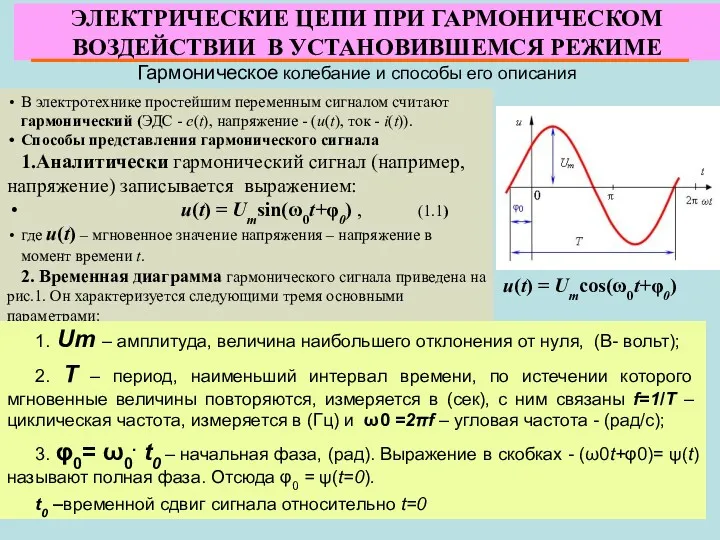 Электрические цепи при гармоническом воздействии в установившемся режиме
Электрические цепи при гармоническом воздействии в установившемся режиме Уравнение Менделеева - Клапейрона
Уравнение Менделеева - Клапейрона Урок по физике в 7классе на тему Плотность вещества. Решение задач
Урок по физике в 7классе на тему Плотность вещества. Решение задач Tiristor GTO
Tiristor GTO Электротехника. Резонанс в электрических цепях. (Лекция 9)
Электротехника. Резонанс в электрических цепях. (Лекция 9) Измерение параметров инфракрасного и терагерцового излучения ч.2 Схемы измерения параметров
Измерение параметров инфракрасного и терагерцового излучения ч.2 Схемы измерения параметров Спектры. Виды спектров
Спектры. Виды спектров Инструментальные методы анализа
Инструментальные методы анализа Реализация проблемного метода обучения на уроках физики с помощью интерактивных компьютерных моделей
Реализация проблемного метода обучения на уроках физики с помощью интерактивных компьютерных моделей