- Расчет характеристик двигателей приводов

Содержание
- 2. Содержание лекции Этапы выбора привода. Режимы работы двигателей. Расчет мощности двигателя. Метод эквивалентных величин. Пример выбора
- 3. Этапы выбора привода - 1 Расчет приводов роботов состоит из основных трех этапов: 1. Методика и
- 4. Режимы работы двигателей - 1 Определение мощности двигателя выполняется в соответствии с нагрузкой на его валу
- 5. Режимы работы двигателей - 2 Режимы работы двигателей представлены на рис. 1. При продолжительном режиме за
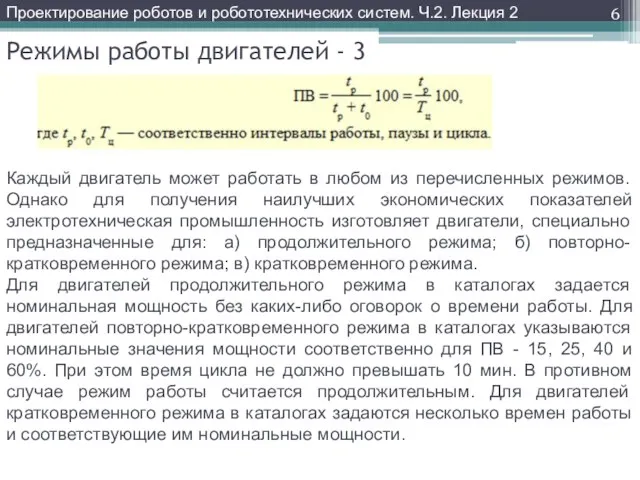
- 6. Режимы работы двигателей - 3 Каждый двигатель может работать в любом из перечисленных режимов. Однако для
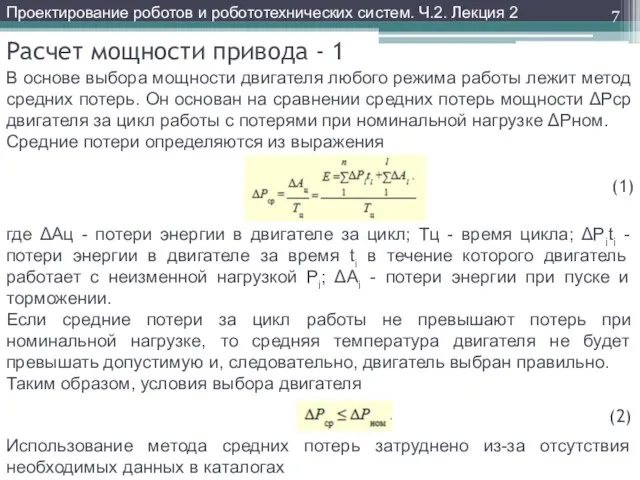
- 7. Расчет мощности привода - 1 В основе выбора мощности двигателя любого режима работы лежит метод средних
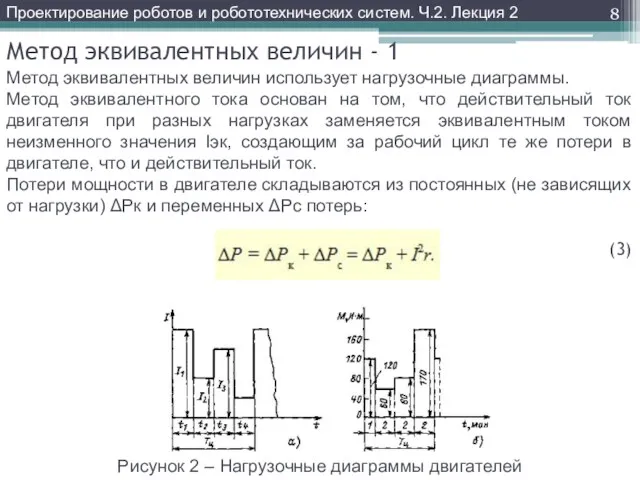
- 8. Метод эквивалентных величин - 1 Метод эквивалентных величин использует нагрузочные диаграммы. Meтод эквивалентного тока основан на
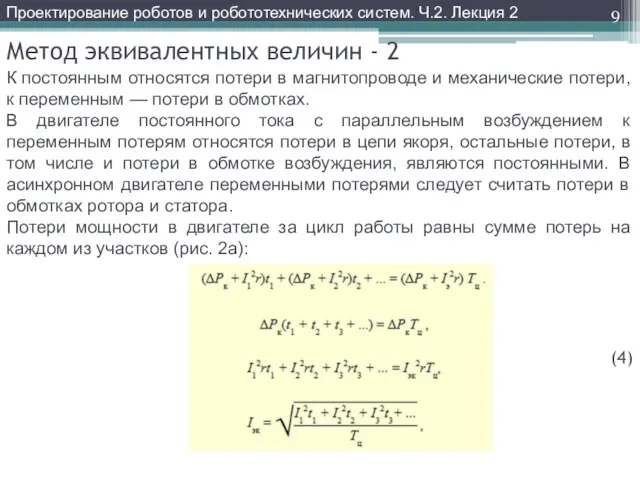
- 9. Метод эквивалентных величин - 2 К постоянным относятся потери в магнитопроводе и механические потери, к переменным
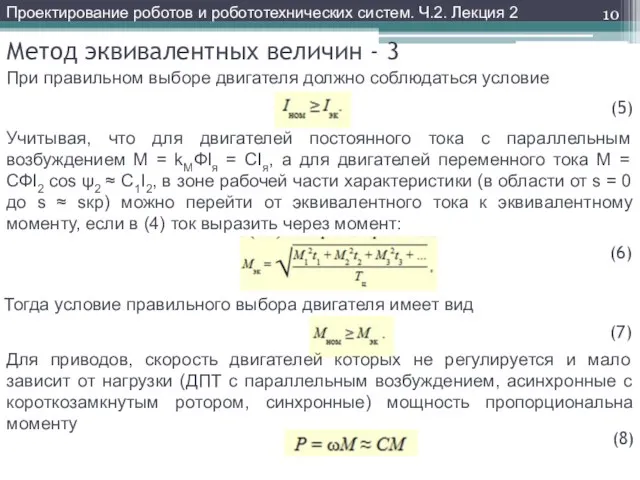
- 10. Метод эквивалентных величин - 3 При правильном выборе двигателя должно соблюдаться условие Проектирование роботов и робототехнических
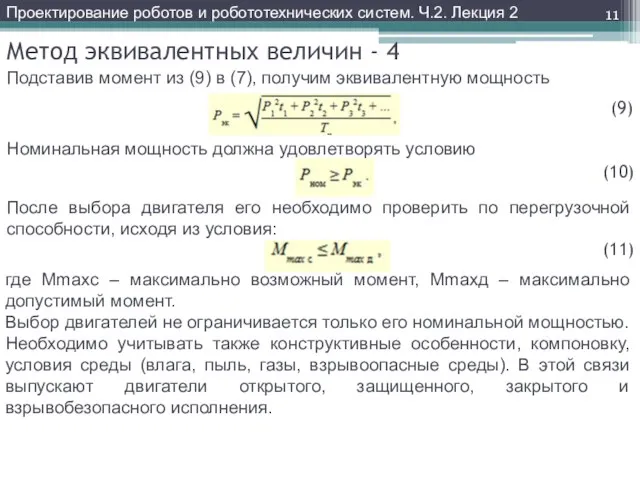
- 11. Метод эквивалентных величин - 4 Подставив момент из (9) в (7), получим эквивалентную мощность Проектирование роботов
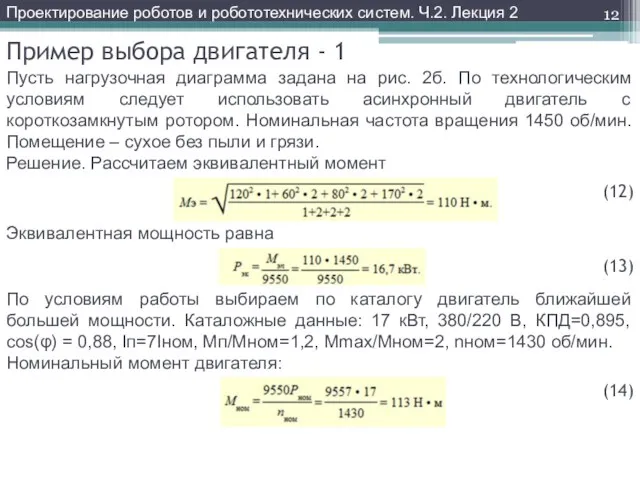
- 12. Пример выбора двигателя - 1 Пусть нагрузочная диаграмма задана на рис. 2б. По технологическим условиям следует
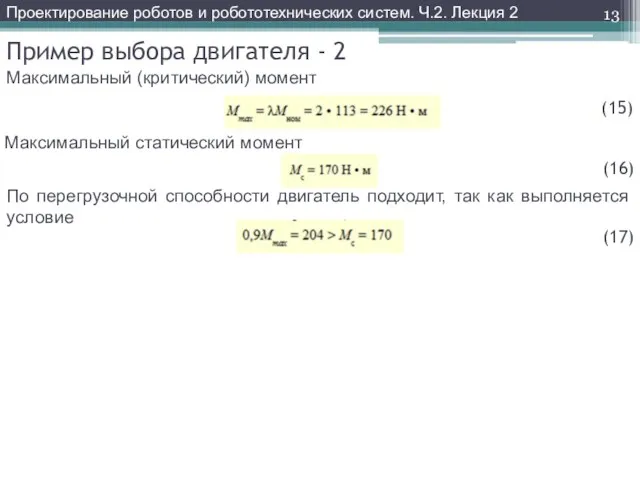
- 13. Пример выбора двигателя - 2 Максимальный (критический) момент Проектирование роботов и робототехнических систем. Ч.2. Лекция 2
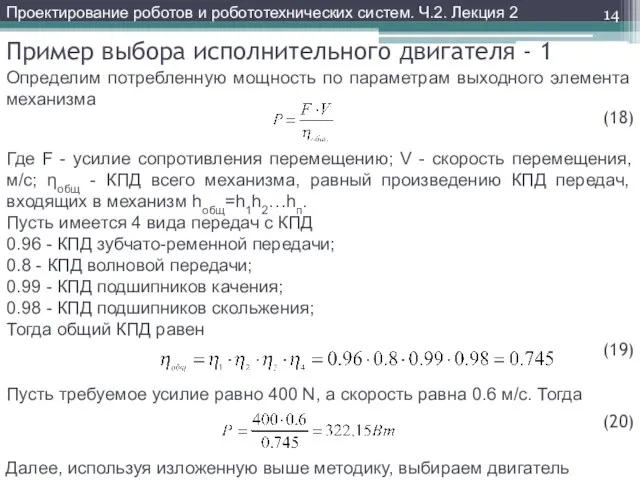
- 14. Пример выбора исполнительного двигателя - 1 Определим потребленную мощность по параметрам выходного элемента механизма Проектирование роботов
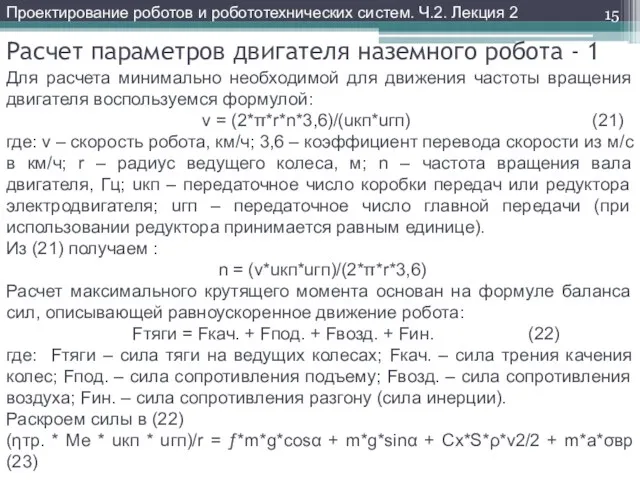
- 15. Расчет параметров двигателя наземного робота - 1 Для расчета минимально необходимой для движения частоты вращения двигателя
- 17. Скачать презентацию
Содержание лекции
Этапы выбора привода.
Режимы работы двигателей.
Расчет мощности двигателя.
Метод эквивалентных величин.
Пример выбора
Содержание лекции
Этапы выбора привода.
Режимы работы двигателей.
Расчет мощности двигателя.
Метод эквивалентных величин.
Пример выбора
Этапы выбора привода - 1
Расчет приводов роботов состоит из основных трех
Этапы выбора привода - 1
Расчет приводов роботов состоит из основных трех
Режимы работы двигателей - 1
Определение мощности двигателя выполняется в соответствии с
Режимы работы двигателей - 1
Определение мощности двигателя выполняется в соответствии с
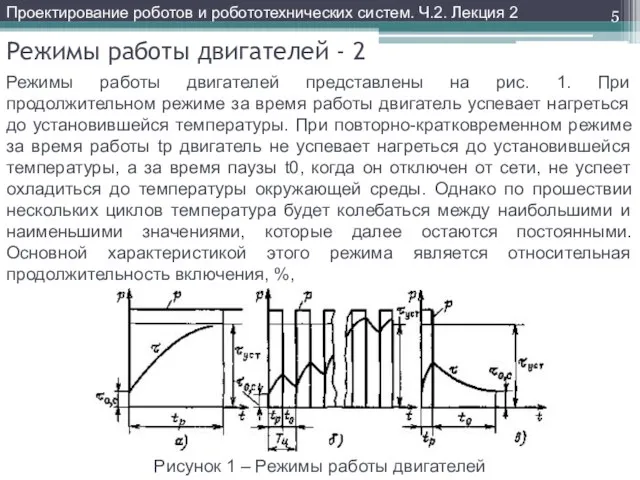
Режимы работы двигателей - 2
Режимы работы двигателей представлены на рис. 1.
Режимы работы двигателей - 2
Режимы работы двигателей представлены на рис. 1.
Режимы работы двигателей - 3
Каждый двигатель может работать в любом из
Режимы работы двигателей - 3
Каждый двигатель может работать в любом из
Расчет мощности привода - 1
В основе выбора мощности двигателя любого режима
Расчет мощности привода - 1
В основе выбора мощности двигателя любого режима
Метод эквивалентных величин - 1
Метод эквивалентных величин использует нагрузочные диаграммы.
Meтод эквивалентного
Метод эквивалентных величин - 1
Метод эквивалентных величин использует нагрузочные диаграммы.
Meтод эквивалентного
Метод эквивалентных величин - 2
К постоянным относятся потери в магнитопроводе и
Метод эквивалентных величин - 2
К постоянным относятся потери в магнитопроводе и
Метод эквивалентных величин - 3
При правильном выборе двигателя должно соблюдаться условие
Проектирование
Метод эквивалентных величин - 3
При правильном выборе двигателя должно соблюдаться условие
Проектирование
Метод эквивалентных величин - 4
Подставив момент из (9) в (7), получим
Метод эквивалентных величин - 4
Подставив момент из (9) в (7), получим
Пример выбора двигателя - 1
Пусть нагрузочная диаграмма задана на рис. 2б.
Пример выбора двигателя - 1
Пусть нагрузочная диаграмма задана на рис. 2б.
Пример выбора двигателя - 2
Максимальный (критический) момент
Проектирование роботов и робототехнических систем.
Пример выбора двигателя - 2
Максимальный (критический) момент
Проектирование роботов и робототехнических систем.
Пример выбора исполнительного двигателя - 1
Определим потребленную мощность по параметрам выходного
Пример выбора исполнительного двигателя - 1
Определим потребленную мощность по параметрам выходного
Расчет параметров двигателя наземного робота - 1
Для расчета минимально необходимой для
Расчет параметров двигателя наземного робота - 1
Для расчета минимально необходимой для
 Розв’язування задач з теми Закон збереження імпульсу
Розв’язування задач з теми Закон збереження імпульсу Subjects: forces in mechanics. Dynamics. Newton’s laws
Subjects: forces in mechanics. Dynamics. Newton’s laws Световые кванты
Световые кванты Резьбы, резьбовые изделия и соединения. Разъемные соединения. Неразъемные соединения
Резьбы, резьбовые изделия и соединения. Разъемные соединения. Неразъемные соединения Системы смазки и охлаждения двигателя
Системы смазки и охлаждения двигателя Гидростатика. Давление в жидкости
Гидростатика. Давление в жидкости DSI M78 6-Speed A/T. Overseas service team
DSI M78 6-Speed A/T. Overseas service team Геометрическая оптика
Геометрическая оптика Электромагнитное поле
Электромагнитное поле Отдельные электроприемники в однофазной цепи переменного тока
Отдельные электроприемники в однофазной цепи переменного тока Центрифугирование
Центрифугирование Өз құрылымы мен құрамы болмайтын бөлшекті
Өз құрылымы мен құрамы болмайтын бөлшекті Движение заряженной частицы в электрическом и магнитном полях. Лекция 6
Движение заряженной частицы в электрическом и магнитном полях. Лекция 6 Правило буравчика, правило правой руки
Правило буравчика, правило правой руки Кузнечно-сварочная практика. Специальность 190604 Техническое обслуживание и ремонт автомобильного транспорта
Кузнечно-сварочная практика. Специальность 190604 Техническое обслуживание и ремонт автомобильного транспорта Двигатель внутреннего сгорания. Устройство. Схема. Применение
Двигатель внутреннего сгорания. Устройство. Схема. Применение Движение тела под действием силы трения
Движение тела под действием силы трения Устройство токарного станка для обработки древесины. (Технический труд. 6 класс)
Устройство токарного станка для обработки древесины. (Технический труд. 6 класс) Вещества и явления в окружающем мире
Вещества и явления в окружающем мире Дизельный двигатель
Дизельный двигатель Физика в стихах
Физика в стихах Урок Оптические приборы, физика11 класс
Урок Оптические приборы, физика11 класс Отчет об исследовательской работе
Отчет об исследовательской работе Основы молекулярной физики и термодинамики
Основы молекулярной физики и термодинамики Идеальные газы тождественных частиц. Распределение Ферми-Дирака и Бозе-Эйнштейна
Идеальные газы тождественных частиц. Распределение Ферми-Дирака и Бозе-Эйнштейна Схема сверхзвукового обтекания затупленного тела
Схема сверхзвукового обтекания затупленного тела Оптические методы и приборы контроля качества продукции
Оптические методы и приборы контроля качества продукции Равновесные и неравновесные носители зарядов
Равновесные и неравновесные носители зарядов