- Sensors and actuators

Содержание
- 2. Sensors and Transducers (definition) Pr. Nazim Mir-Nasiri Sensors are used for an element which produces a
- 3. Sensors performance terminology and specifications Pr. Nazim Mir-Nasiri Range and span Range defines the limits between
- 4. Sensors performance terminology and specifications Pr. Nazim Mir-Nasiri Accuracy is the extend to which the value
- 5. Sensors performance terminology and specifications Pr. Nazim Mir-Nasiri Sensitivity is relationship indicating how much output you
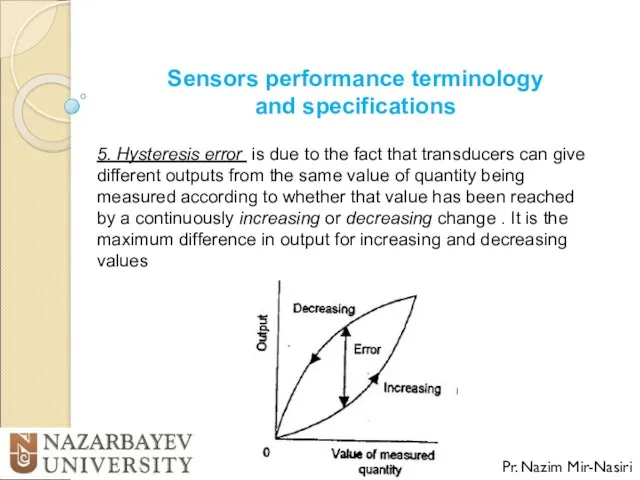
- 6. Sensors performance terminology and specifications Pr. Nazim Mir-Nasiri 5. Hysteresis error is due to the fact
- 7. Sensors performance terminology and specifications Pr. Nazim Mir-Nasiri 6. Non-linearity error is due to the fact
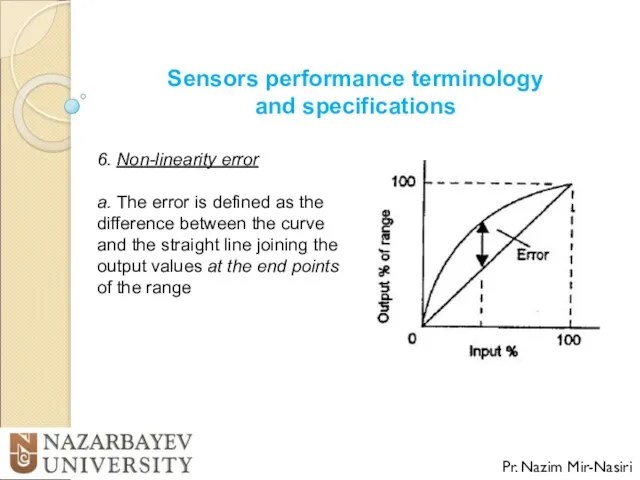
- 8. Sensors performance terminology and specifications Pr. Nazim Mir-Nasiri 6. Non-linearity error a. The error is defined
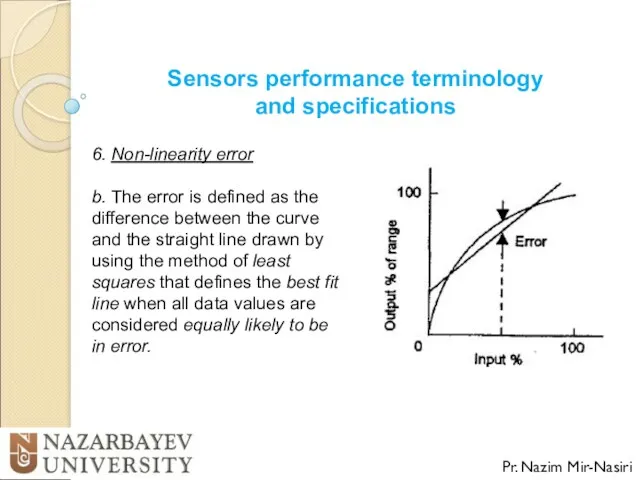
- 9. Sensors performance terminology and specifications Pr. Nazim Mir-Nasiri 6. Non-linearity error b. The error is defined
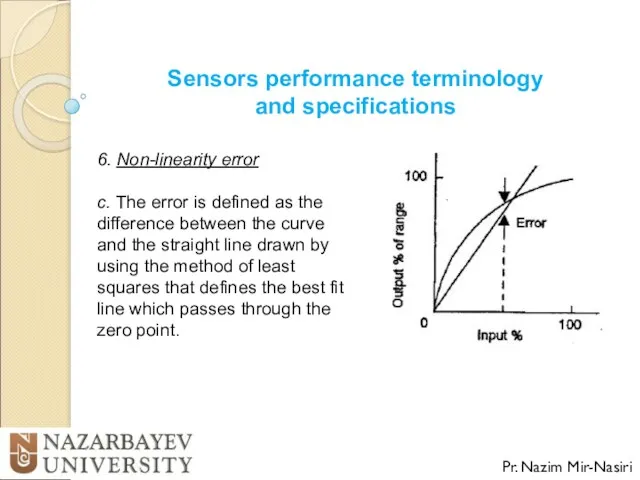
- 10. Sensors performance terminology and specifications Pr. Nazim Mir-Nasiri 6. Non-linearity error c. The error is defined
- 11. Sensors performance terminology and specifications Pr. Nazim Mir-Nasiri 7. Repeatability/reproducibility of a transducer are used to
- 12. Sensors performance terminology and specifications Pr. Nazim Mir-Nasiri 8. Stability of a transducer is its ability
- 13. Sensors performance terminology and specifications Pr. Nazim Mir-Nasiri 9. Dead band/time of a transducer is the
- 14. Sensors performance terminology and specifications Pr. Nazim Mir-Nasiri 10. Resolution. When the input varies continuously over
- 15. Sensors performance terminology and specifications Pr. Nazim Mir-Nasiri 11. Output impedance When a sensor giving an
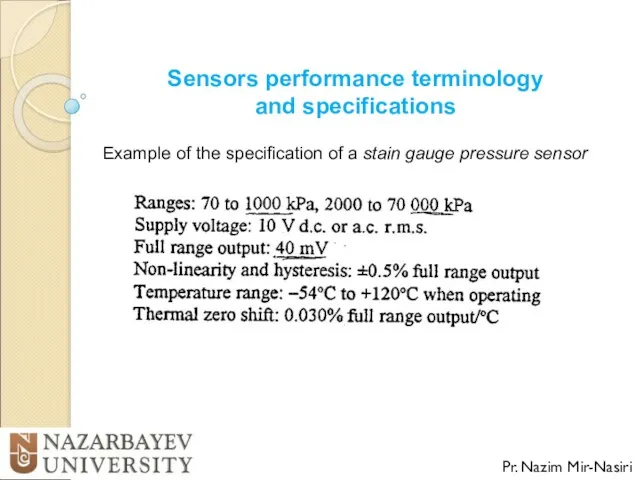
- 16. Sensors performance terminology and specifications Pr. Nazim Mir-Nasiri Example of the specification of a stain gauge
- 17. Static and Dynamic Characteristics of Sensors Pr. Nazim Mir-Nasiri The static characteristics are the values given
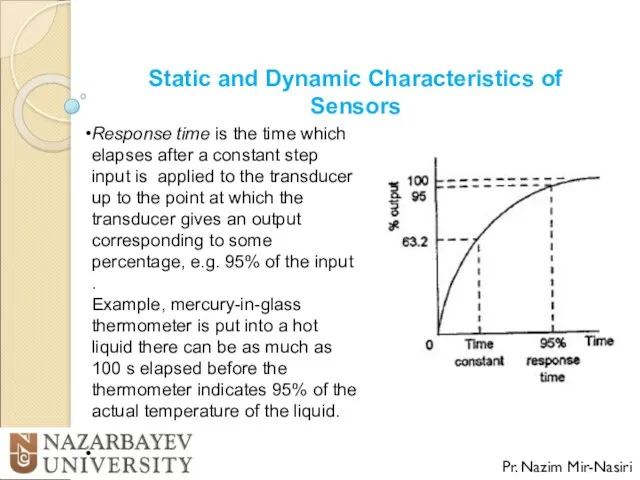
- 18. Static and Dynamic Characteristics of Sensors Pr. Nazim Mir-Nasiri Response time is the time which elapses
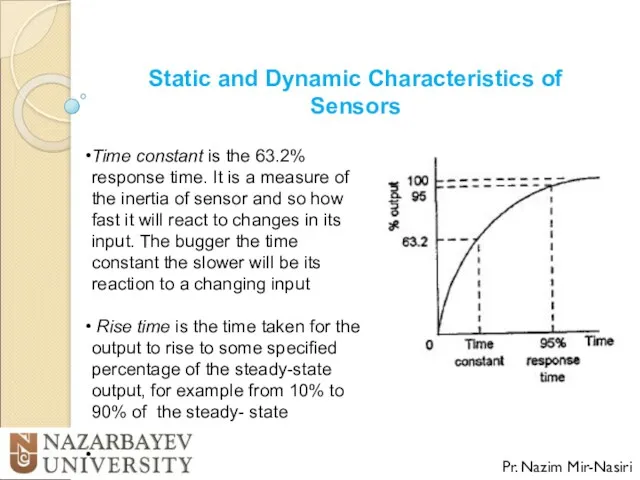
- 19. Static and Dynamic Characteristics of Sensors Pr. Nazim Mir-Nasiri Time constant is the 63.2% response time.
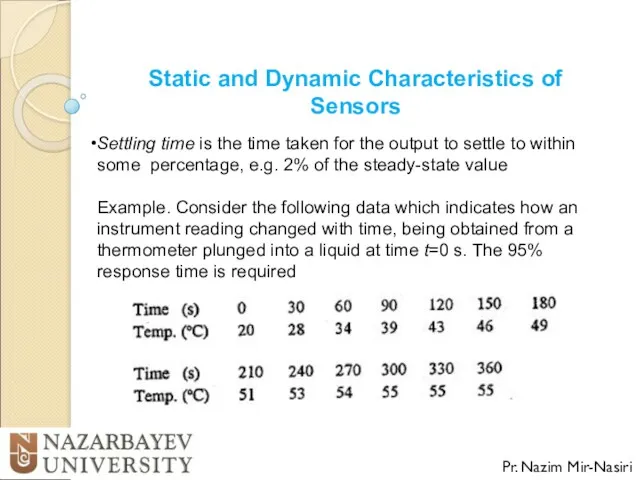
- 20. Static and Dynamic Characteristics of Sensors Pr. Nazim Mir-Nasiri Settling time is the time taken for
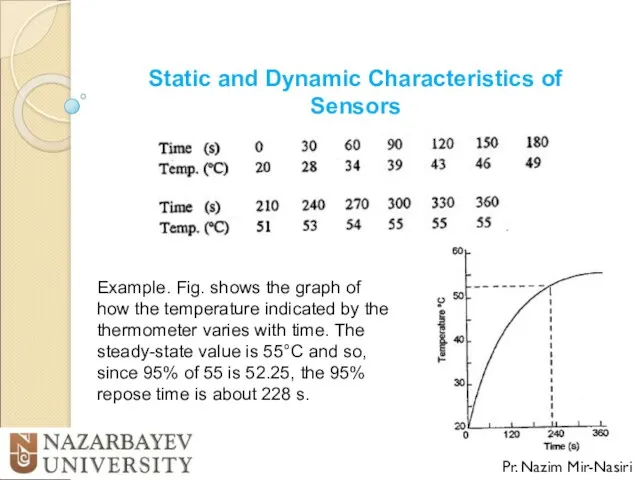
- 21. Static and Dynamic Characteristics of Sensors Pr. Nazim Mir-Nasiri Example. Fig. shows the graph of how
- 23. Скачать презентацию
Sensors and Transducers
(definition)
Pr. Nazim Mir-Nasiri
Sensors are used for an element
Sensors and Transducers
(definition)
Pr. Nazim Mir-Nasiri
Sensors are used for an element
Sensors performance terminology and specifications
Pr. Nazim Mir-Nasiri
Range and span
Sensors performance terminology and specifications
Pr. Nazim Mir-Nasiri
Range and span
Sensors performance terminology and specifications
Pr. Nazim Mir-Nasiri
Accuracy is the extend
Sensors performance terminology and specifications
Pr. Nazim Mir-Nasiri
Accuracy is the extend
Sensors performance terminology and specifications
Pr. Nazim Mir-Nasiri
Sensitivity is relationship indicating
Sensors performance terminology and specifications
Pr. Nazim Mir-Nasiri
Sensitivity is relationship indicating
Sensors performance terminology and specifications
Pr. Nazim Mir-Nasiri
5. Hysteresis error is
Sensors performance terminology and specifications
Pr. Nazim Mir-Nasiri
5. Hysteresis error is
Sensors performance terminology and specifications
Pr. Nazim Mir-Nasiri
6. Non-linearity error is
Sensors performance terminology and specifications
Pr. Nazim Mir-Nasiri
6. Non-linearity error is
Sensors performance terminology and specifications
Pr. Nazim Mir-Nasiri
6. Non-linearity error
a. The
Sensors performance terminology and specifications
Pr. Nazim Mir-Nasiri
6. Non-linearity error
a. The
Sensors performance terminology and specifications
Pr. Nazim Mir-Nasiri
6. Non-linearity error
b. The
Sensors performance terminology and specifications
Pr. Nazim Mir-Nasiri
6. Non-linearity error
b. The
Sensors performance terminology and specifications
Pr. Nazim Mir-Nasiri
6. Non-linearity error
c. The
Sensors performance terminology and specifications
Pr. Nazim Mir-Nasiri
6. Non-linearity error
c. The
Sensors performance terminology and specifications
Pr. Nazim Mir-Nasiri
7. Repeatability/reproducibility of a
Sensors performance terminology and specifications
Pr. Nazim Mir-Nasiri
7. Repeatability/reproducibility of a
Sensors performance terminology and specifications
Pr. Nazim Mir-Nasiri
8. Stability of a
Sensors performance terminology and specifications
Pr. Nazim Mir-Nasiri
8. Stability of a
Sensors performance terminology and specifications
Pr. Nazim Mir-Nasiri
9. Dead band/time of
Sensors performance terminology and specifications
Pr. Nazim Mir-Nasiri
9. Dead band/time of
Sensors performance terminology and specifications
Pr. Nazim Mir-Nasiri
10. Resolution.
When the input
Sensors performance terminology and specifications
Pr. Nazim Mir-Nasiri
10. Resolution.
When the input
Sensors performance terminology and specifications
Pr. Nazim Mir-Nasiri
11. Output impedance
When
Sensors performance terminology and specifications
Pr. Nazim Mir-Nasiri
11. Output impedance
When
Sensors performance terminology and specifications
Pr. Nazim Mir-Nasiri
Example of the specification
Sensors performance terminology and specifications
Pr. Nazim Mir-Nasiri
Example of the specification
Static and Dynamic Characteristics of Sensors
Pr. Nazim Mir-Nasiri
The static characteristics
Static and Dynamic Characteristics of Sensors
Pr. Nazim Mir-Nasiri
The static characteristics
Static and Dynamic Characteristics of Sensors
Pr. Nazim Mir-Nasiri
Response time is
Static and Dynamic Characteristics of Sensors
Pr. Nazim Mir-Nasiri
Response time is
Static and Dynamic Characteristics of Sensors
Pr. Nazim Mir-Nasiri
Time constant is
Static and Dynamic Characteristics of Sensors
Pr. Nazim Mir-Nasiri
Time constant is
Static and Dynamic Characteristics of Sensors
Pr. Nazim Mir-Nasiri
Settling time is
Static and Dynamic Characteristics of Sensors
Pr. Nazim Mir-Nasiri
Settling time is
Static and Dynamic Characteristics of Sensors
Pr. Nazim Mir-Nasiri
Example. Fig. shows
Static and Dynamic Characteristics of Sensors
Pr. Nazim Mir-Nasiri
Example. Fig. shows
 Кулон заңы
Кулон заңы ПРЕЗЕНТАЦИЯ К УРОКУ-ИССЛЕДОВАНИЮ ПОВЕРХНОСТНОЕ НАТЯЖЕНИЕ
ПРЕЗЕНТАЦИЯ К УРОКУ-ИССЛЕДОВАНИЮ ПОВЕРХНОСТНОЕ НАТЯЖЕНИЕ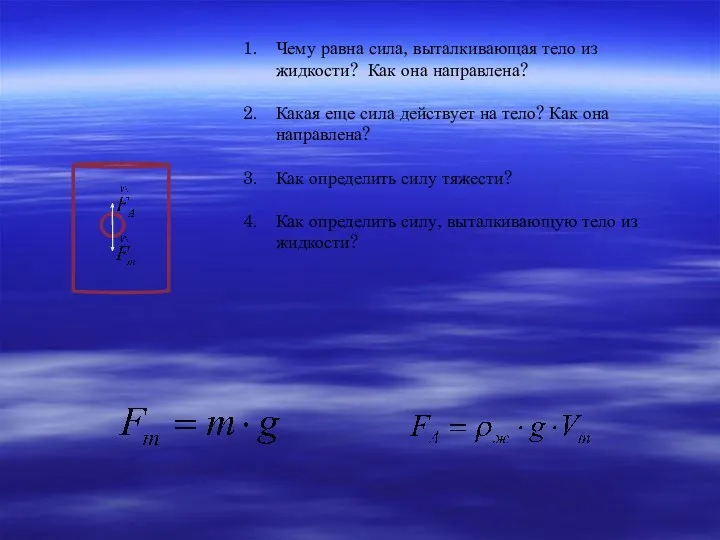 Урок и презентация по теме Плавание тел 7 класс
Урок и презентация по теме Плавание тел 7 класс Статус-отчет по ремонту Сормовский 3060
Статус-отчет по ремонту Сормовский 3060 Электростатическое поле. Закон Кулона. Напряженность электростатического поля
Электростатическое поле. Закон Кулона. Напряженность электростатического поля Как называется коэффициент пропорциональности между энергией кванта и частотой соответствующего электромагнитного излучения?
Как называется коэффициент пропорциональности между энергией кванта и частотой соответствующего электромагнитного излучения? Цилиндрические прямозубые передачи
Цилиндрические прямозубые передачи Электромагнитная обстановка на объектах электроэнергетики
Электромагнитная обстановка на объектах электроэнергетики Презентация Через тернии к звёздам
Презентация Через тернии к звёздам Конструирование валов
Конструирование валов Кинематика. Решение задач
Кинематика. Решение задач Нарезание резьбы на металлических деталях
Нарезание резьбы на металлических деталях Реактивное движение и двигатели. Автор Максимова Наталья Сергеевна
Реактивное движение и двигатели. Автор Максимова Наталья Сергеевна Динамика. Законы Ньютона. 10 класс
Динамика. Законы Ньютона. 10 класс Линза. Виды линз
Линза. Виды линз Механические свойства металлов
Механические свойства металлов Альтернативные виды топлива
Альтернативные виды топлива Космические скорости
Космические скорости Приборы и методы радиометрических измерений
Приборы и методы радиометрических измерений Фрикционные передачи
Фрикционные передачи Исследовательская работа Электричество в повседневной жизни
Исследовательская работа Электричество в повседневной жизни Электрические явления.
Электрические явления. Эксплуатация оборудования для ТО и ТР приборов бензиновых систем питания автомобилей (урок 18)
Эксплуатация оборудования для ТО и ТР приборов бензиновых систем питания автомобилей (урок 18) Презентация Звук
Презентация Звук Свойства твердых тел
Свойства твердых тел Начало космической эры и роль ученых нашей страны в изучении вселенной
Начало космической эры и роль ученых нашей страны в изучении вселенной Винаходи під час промислового перевороту в Англії
Винаходи під час промислового перевороту в Англії Типовые примеры сборки узлов и панелей клепанной конструкции
Типовые примеры сборки узлов и панелей клепанной конструкции