- Случаи приведения и уравнения равновесия систем сил

Содержание
- 2. ТЕОРЕМА ПУАНСО (ОСНОВНАЯ ТЕОРЕМА СТАТИКИ) Основная теорема статики Произвольная система сил эквивалентна силе, равной главному вектору
- 3. ТЕОРЕМА ПУАНСО (ОСНОВНАЯ ТЕОРЕМА СТАТИКИ) Основная теорема статики Произвольная система сил эквивалентна силе, равной главному вектору
- 4. СТАТИЧЕСКИЕ ИНВАРИАНТЫ Статические инварианты – характеристики системы сил, не зависящие от центра приведения Статические инварианты позволяют
- 5. СТАТИЧЕСКИЕ ИНВАРИАНТЫ Главный момент не является статическим инвариантом. Как он зависит от центра приведения? Определим момент
- 6. СТАТИЧЕСКИЕ ИНВАРИАНТЫ Случаи приведения Умножим равенство скалярно на главный вектор системы Последнее слагаемое равно нулю (почему?)
- 7. СТАТИЧЕСКИЕ ИНВАРИАНТЫ Случаи приведения Второй статический инвариант – минимальный главный момент Получили альтернативное определение Как найти
- 8. ДИНАМИЧЕСКИЙ ВИНТ Случаи приведения Динамический винт – совокупность силы и пары сил, момент которой параллелен силе
- 9. ТЕОРЕМА О ДИНАМИЧЕСКОМ ВИНТЕ Случаи приведения Если статические инварианты системы сил отличны от нуля, то система
- 10. СЛУЧАИ ПРИВЕДЕНИЯ СИСТЕМ СИЛ Случаи приведения динамический винт равнодействующая пара сил система сил уравновешена
- 11. УСЛОВИЯ РАВНОВЕСИЯ ТЕЛА Условия равновесия система сил уравновешена АНАЛИТИЧЕСКОЕ ОПРЕДЕЛЕНИЕ ГЛАВНОГО ВЕКТОРА И ГЛАВНОГО МОМЕНТА
- 12. УРАВНЕНИЯ РАВНОВЕСИЯ Условия равновесия 1. Произвольная система сил
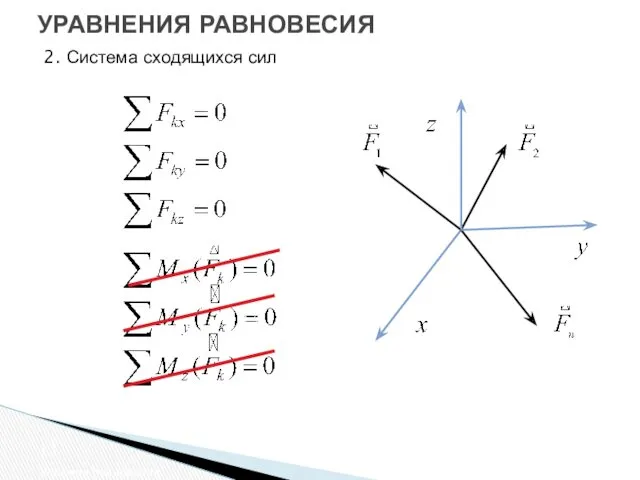
- 13. УРАВНЕНИЯ РАВНОВЕСИЯ Условия равновесия 2. Система сходящихся сил
- 14. УРАВНЕНИЯ РАВНОВЕСИЯ Условия равновесия 3. Система параллельных сил
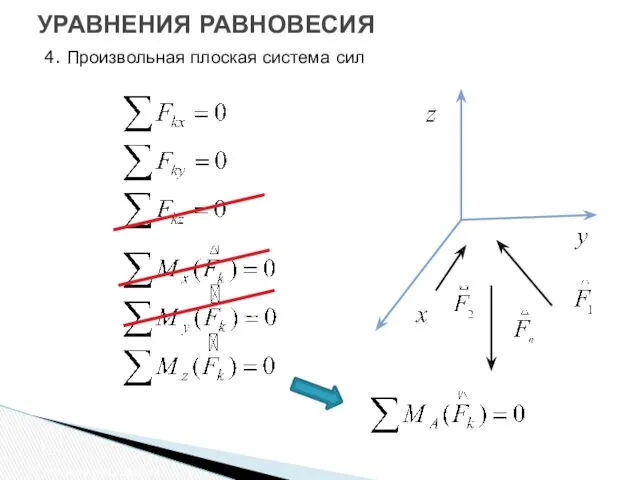
- 15. УРАВНЕНИЯ РАВНОВЕСИЯ Условия равновесия 4. Произвольная плоская система сил
- 16. РЕШЕНИЕ ЗАДАЧ НА РАВНОВЕСИЕ ТЕЛ. ФЕРМА Условия равновесия Опоры ЛЭП Мосты Подъемные краны Металлические каркасы зданий
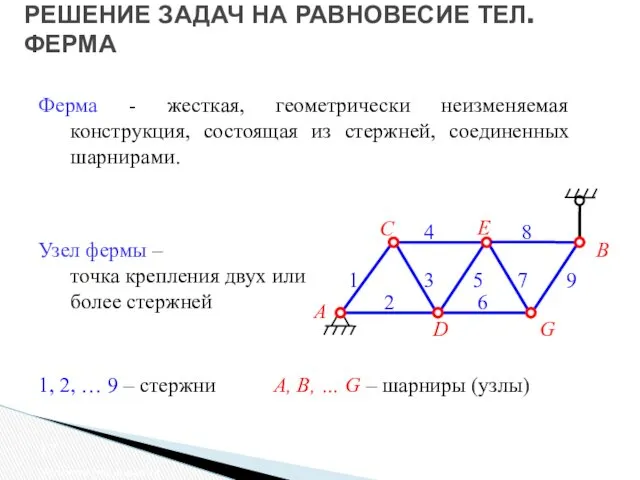
- 17. РЕШЕНИЕ ЗАДАЧ НА РАВНОВЕСИЕ ТЕЛ. ФЕРМА Условия равновесия Ферма - жесткая, геометрически неизменяемая конструкция, состоящая из
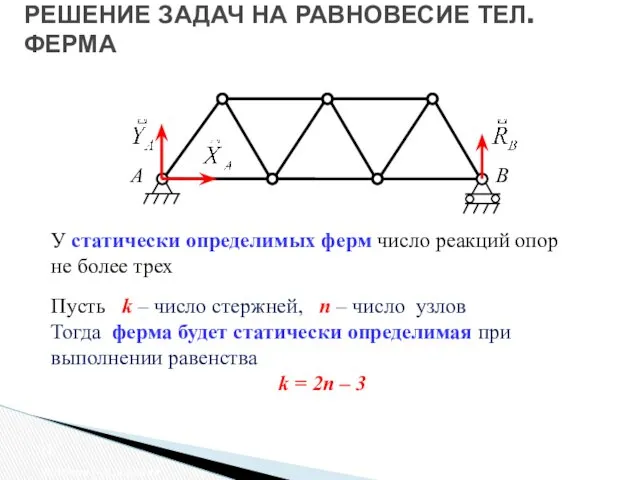
- 18. РЕШЕНИЕ ЗАДАЧ НА РАВНОВЕСИЕ ТЕЛ. ФЕРМА Условия равновесия Пусть k – число стержней, n – число
- 19. РЕШЕНИЕ ЗАДАЧ НА РАВНОВЕСИЕ ТЕЛ. ФЕРМА Условия равновесия Для расчета ферм необходимо Найти реакции внешних опор
- 21. Скачать презентацию
ТЕОРЕМА ПУАНСО (ОСНОВНАЯ ТЕОРЕМА СТАТИКИ)
Основная теорема статики
Произвольная система сил эквивалентна силе,
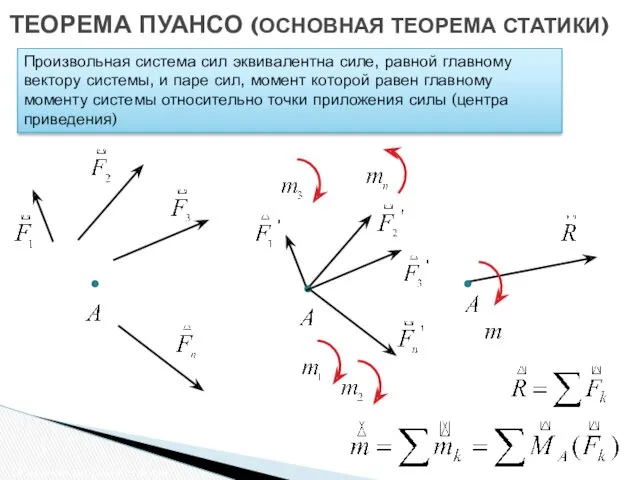
ТЕОРЕМА ПУАНСО (ОСНОВНАЯ ТЕОРЕМА СТАТИКИ)
Основная теорема статики
Произвольная система сил эквивалентна силе,
ТЕОРЕМА ПУАНСО (ОСНОВНАЯ ТЕОРЕМА СТАТИКИ)
Основная теорема статики
Произвольная система сил эквивалентна силе,
ТЕОРЕМА ПУАНСО (ОСНОВНАЯ ТЕОРЕМА СТАТИКИ)
Основная теорема статики
Произвольная система сил эквивалентна силе,
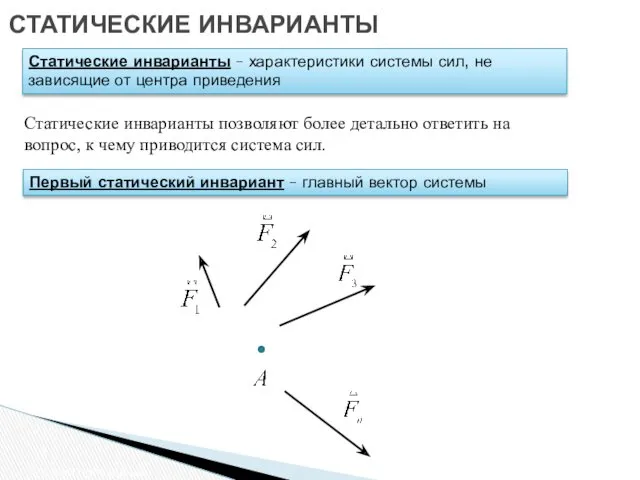
СТАТИЧЕСКИЕ ИНВАРИАНТЫ
Статические инварианты – характеристики системы сил, не зависящие от центра
СТАТИЧЕСКИЕ ИНВАРИАНТЫ
Статические инварианты – характеристики системы сил, не зависящие от центра

СТАТИЧЕСКИЕ ИНВАРИАНТЫ
Главный момент не является статическим инвариантом.
Как он зависит от
СТАТИЧЕСКИЕ ИНВАРИАНТЫ
Главный момент не является статическим инвариантом.
Как он зависит от
СТАТИЧЕСКИЕ ИНВАРИАНТЫ
Случаи приведения
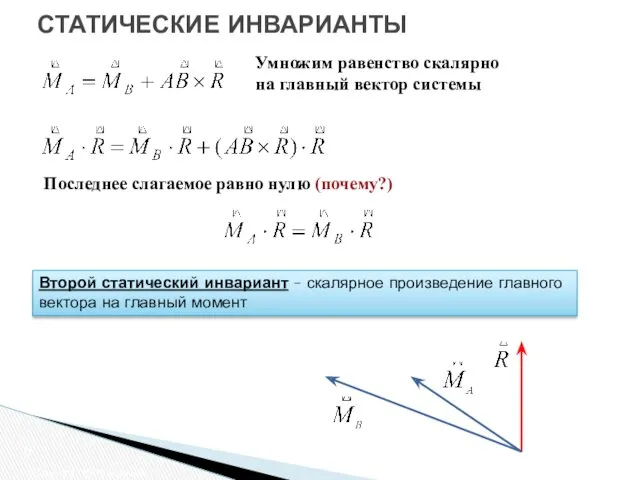
Умножим равенство скалярно
на главный вектор системы
Последнее слагаемое равно
СТАТИЧЕСКИЕ ИНВАРИАНТЫ
Случаи приведения
Умножим равенство скалярно
на главный вектор системы
Последнее слагаемое равно
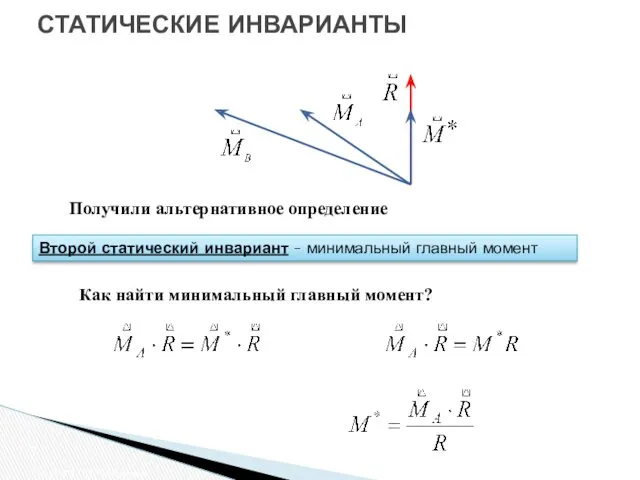
СТАТИЧЕСКИЕ ИНВАРИАНТЫ
Случаи приведения
Второй статический инвариант – минимальный главный момент
Получили альтернативное определение
Как
СТАТИЧЕСКИЕ ИНВАРИАНТЫ
Случаи приведения
Второй статический инвариант – минимальный главный момент
Получили альтернативное определение
Как

ДИНАМИЧЕСКИЙ ВИНТ
Случаи приведения
Динамический винт – совокупность силы и пары сил, момент
ДИНАМИЧЕСКИЙ ВИНТ
Случаи приведения
Динамический винт – совокупность силы и пары сил, момент

ТЕОРЕМА О ДИНАМИЧЕСКОМ ВИНТЕ
Случаи приведения
Если статические инварианты системы сил отличны от
ТЕОРЕМА О ДИНАМИЧЕСКОМ ВИНТЕ
Случаи приведения
Если статические инварианты системы сил отличны от
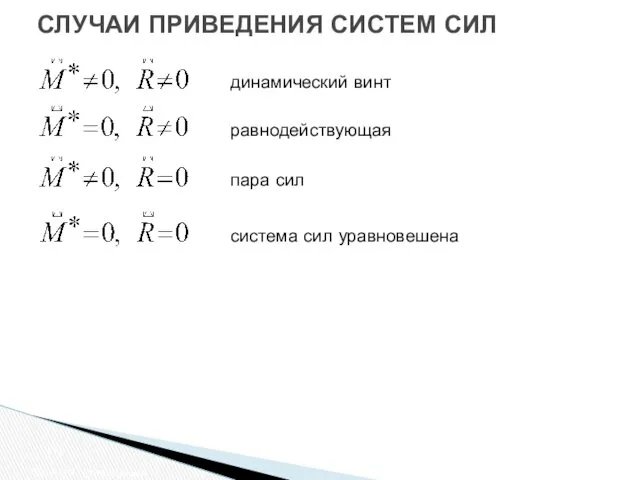
СЛУЧАИ ПРИВЕДЕНИЯ СИСТЕМ СИЛ
Случаи приведения
динамический винт
равнодействующая
пара сил
система сил уравновешена
СЛУЧАИ ПРИВЕДЕНИЯ СИСТЕМ СИЛ
Случаи приведения
динамический винт
равнодействующая
пара сил
система сил уравновешена
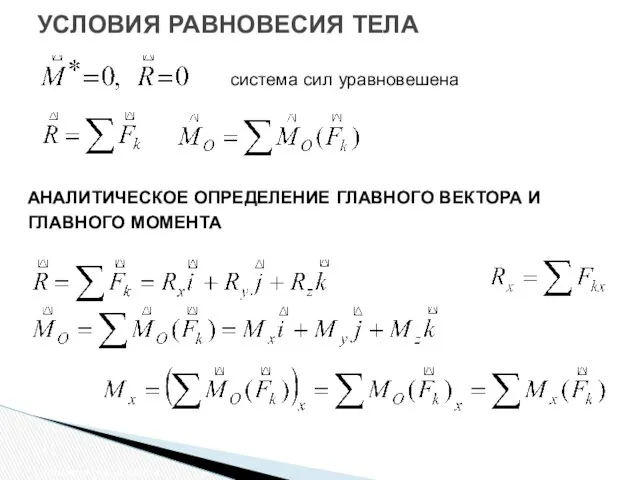
УСЛОВИЯ РАВНОВЕСИЯ ТЕЛА
Условия равновесия
система сил уравновешена
АНАЛИТИЧЕСКОЕ ОПРЕДЕЛЕНИЕ ГЛАВНОГО ВЕКТОРА И
УСЛОВИЯ РАВНОВЕСИЯ ТЕЛА
Условия равновесия
система сил уравновешена
АНАЛИТИЧЕСКОЕ ОПРЕДЕЛЕНИЕ ГЛАВНОГО ВЕКТОРА И
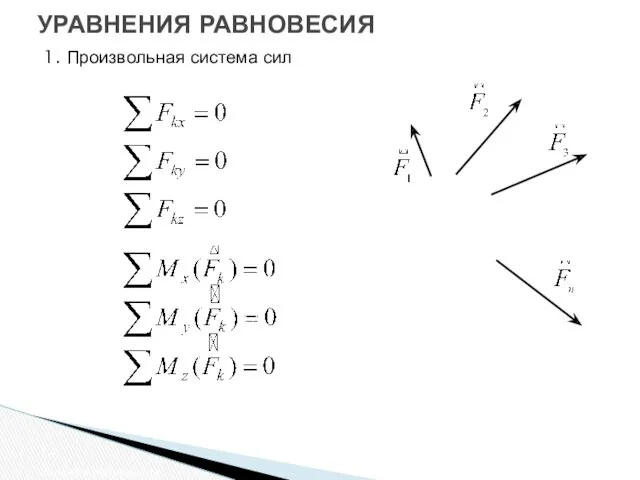
УРАВНЕНИЯ РАВНОВЕСИЯ
Условия равновесия
1. Произвольная система сил
УРАВНЕНИЯ РАВНОВЕСИЯ
Условия равновесия
1. Произвольная система сил
УРАВНЕНИЯ РАВНОВЕСИЯ
Условия равновесия
2. Система сходящихся сил
УРАВНЕНИЯ РАВНОВЕСИЯ
Условия равновесия
2. Система сходящихся сил

УРАВНЕНИЯ РАВНОВЕСИЯ
Условия равновесия
3. Система параллельных сил
УРАВНЕНИЯ РАВНОВЕСИЯ
Условия равновесия
3. Система параллельных сил
УРАВНЕНИЯ РАВНОВЕСИЯ
Условия равновесия
4. Произвольная плоская система сил
УРАВНЕНИЯ РАВНОВЕСИЯ
Условия равновесия
4. Произвольная плоская система сил

РЕШЕНИЕ ЗАДАЧ НА РАВНОВЕСИЕ ТЕЛ. ФЕРМА
Условия равновесия
Опоры ЛЭП
Мосты
Подъемные
краны
Металлические
каркасы зданий
РЕШЕНИЕ ЗАДАЧ НА РАВНОВЕСИЕ ТЕЛ. ФЕРМА
Условия равновесия
Опоры ЛЭП
Мосты
Подъемные
краны
Металлические
каркасы зданий
РЕШЕНИЕ ЗАДАЧ НА РАВНОВЕСИЕ ТЕЛ. ФЕРМА
Условия равновесия
Ферма - жесткая, геометрически неизменяемая
РЕШЕНИЕ ЗАДАЧ НА РАВНОВЕСИЕ ТЕЛ. ФЕРМА
Условия равновесия
Ферма - жесткая, геометрически неизменяемая
РЕШЕНИЕ ЗАДАЧ НА РАВНОВЕСИЕ ТЕЛ. ФЕРМА
Условия равновесия
Пусть k – число стержней,
РЕШЕНИЕ ЗАДАЧ НА РАВНОВЕСИЕ ТЕЛ. ФЕРМА
Условия равновесия
Пусть k – число стержней,
РЕШЕНИЕ ЗАДАЧ НА РАВНОВЕСИЕ ТЕЛ. ФЕРМА
Условия равновесия
Для расчета ферм необходимо
Найти реакции
РЕШЕНИЕ ЗАДАЧ НА РАВНОВЕСИЕ ТЕЛ. ФЕРМА
Условия равновесия
Для расчета ферм необходимо
Найти реакции
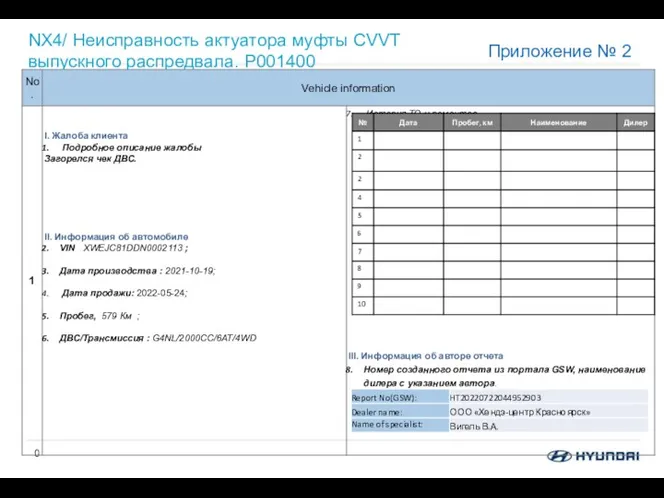 Неисправность актуатора муфты CVVT выпускного распредвала. P001400
Неисправность актуатора муфты CVVT выпускного распредвала. P001400 Wings. Types of Aircraft Wings
Wings. Types of Aircraft Wings Определение зависимости силы трения скольжения от веса тела
Определение зависимости силы трения скольжения от веса тела Школа кота Леопольда
Школа кота Леопольда Зачем физика повару?
Зачем физика повару? Двигатель Cummins ISF 2.8
Двигатель Cummins ISF 2.8 Механізація подрібнення стеблових кормів
Механізація подрібнення стеблових кормів Линза. Построение изображений, даваемых линзой
Линза. Построение изображений, даваемых линзой Динаміка матеріальної точки
Динаміка матеріальної точки Закон Паскаля. Сполучені посудини
Закон Паскаля. Сполучені посудини Магнитные цепи
Магнитные цепи Законы сохранения в механике
Законы сохранения в механике Применение аккумуляторов
Применение аккумуляторов Найзағайдың түрлері
Найзағайдың түрлері Теория судна. Статика. Лекция № 1. Геометрия корпуса судна
Теория судна. Статика. Лекция № 1. Геометрия корпуса судна Наблюдение сплошного и линейчатых спектров
Наблюдение сплошного и линейчатых спектров Нагревание проводников электрическим током. Закон Джоуля – Ленца
Нагревание проводников электрическим током. Закон Джоуля – Ленца Точечные дефекты и их влияние на свойства кристаллов. Равновесные и неравновесные дефекты. Примеси в полупроводниках
Точечные дефекты и их влияние на свойства кристаллов. Равновесные и неравновесные дефекты. Примеси в полупроводниках Дифракционная решетка
Дифракционная решетка Физика вокруг нас
Физика вокруг нас Свтовые кванты
Свтовые кванты Презентация к уроку Свет и цвет
Презентация к уроку Свет и цвет квантовая физика
квантовая физика Переходные процессы
Переходные процессы Количество теплоты. Единицы количества теплоты. Удельная теплоемкость
Количество теплоты. Единицы количества теплоты. Удельная теплоемкость Движение тела под действием силы тяжести
Движение тела под действием силы тяжести Урок по физике в 8 классе на тему Влажность воздуха
Урок по физике в 8 классе на тему Влажность воздуха Молекулярная физика
Молекулярная физика