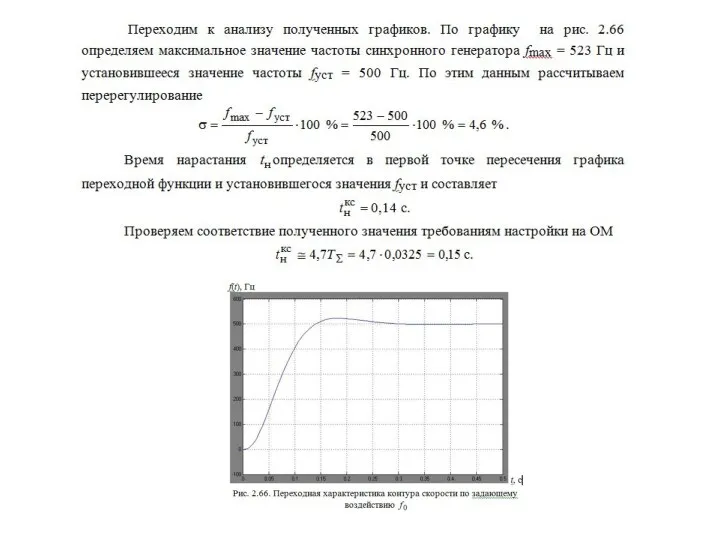
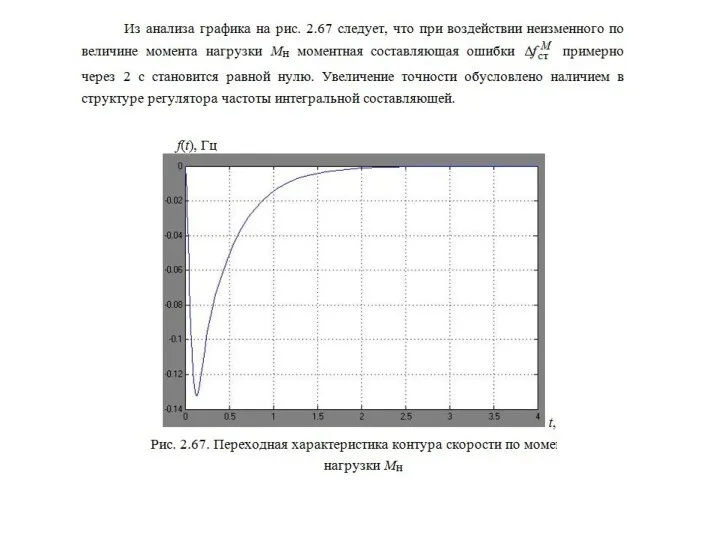
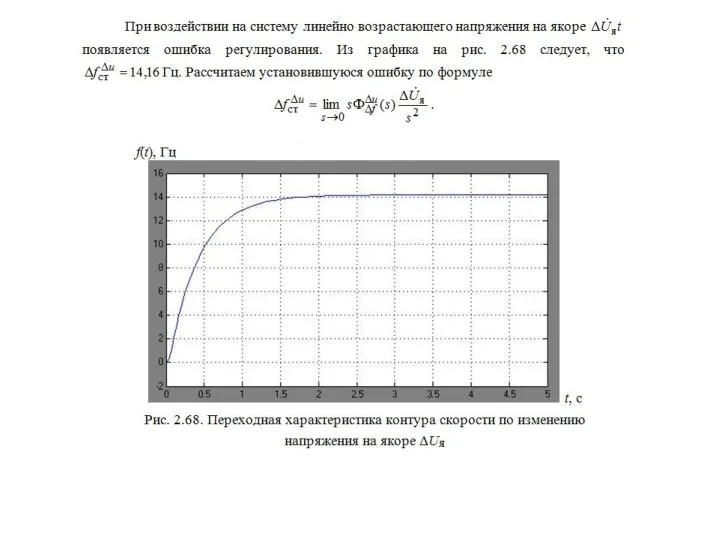
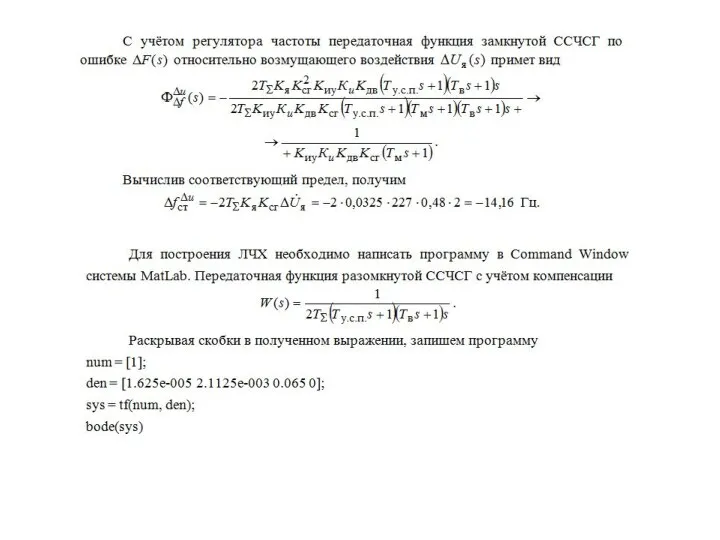
- Стандартные настройки САР и их применение

Содержание
- 2. Синтез САУ заключается в выборе структуры и параметров системы с целью обеспечения заданных требований к показателям
- 3. На втором этапе устанавливается общая структурная схема САУ. В связи с общепринятым делением синтезируемая система разделяется
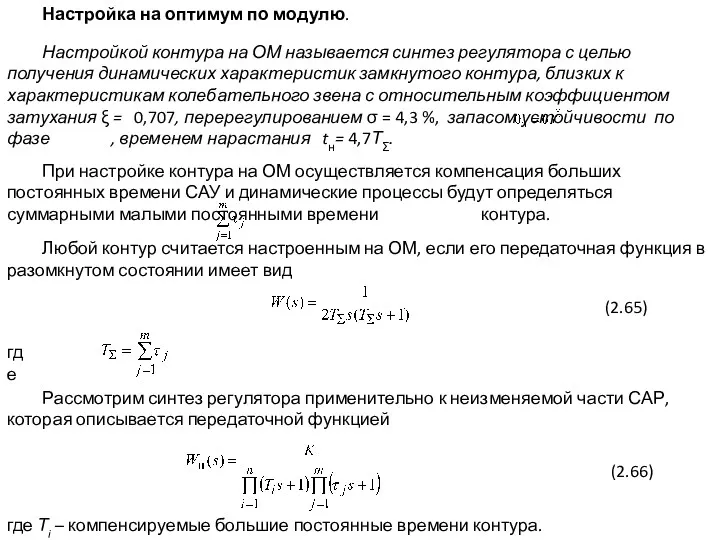
- 4. Настройка на оптимум по модулю. Настройкой контура на ОМ называется синтез регулятора с целью получения динамических
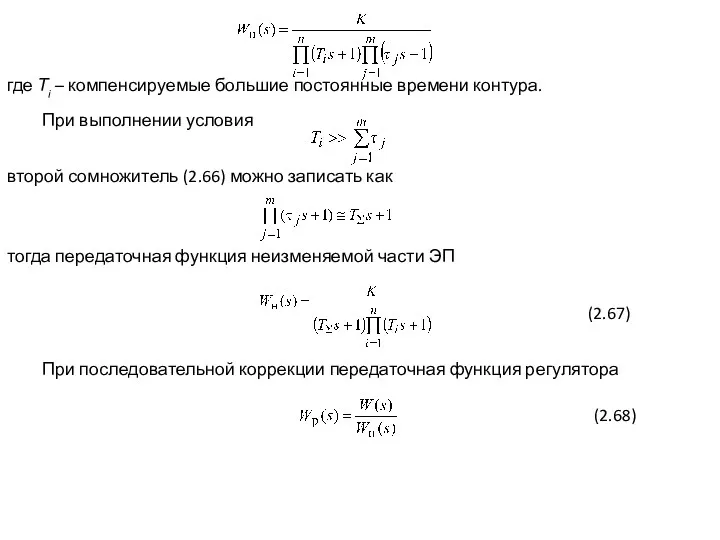
- 5. При выполнении условия второй сомножитель (2.66) можно записать как где Тi – компенсируемые большие постоянные времени
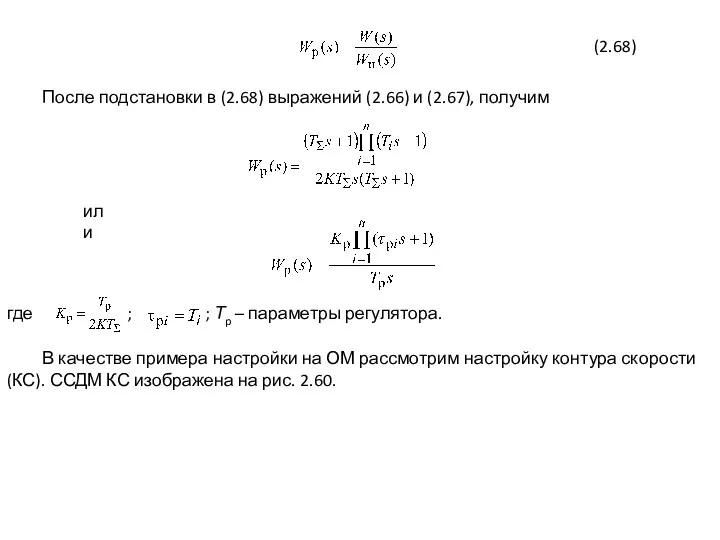
- 6. (2.68) После подстановки в (2.68) выражений (2.66) и (2.67), получим или где ; ; Тp –
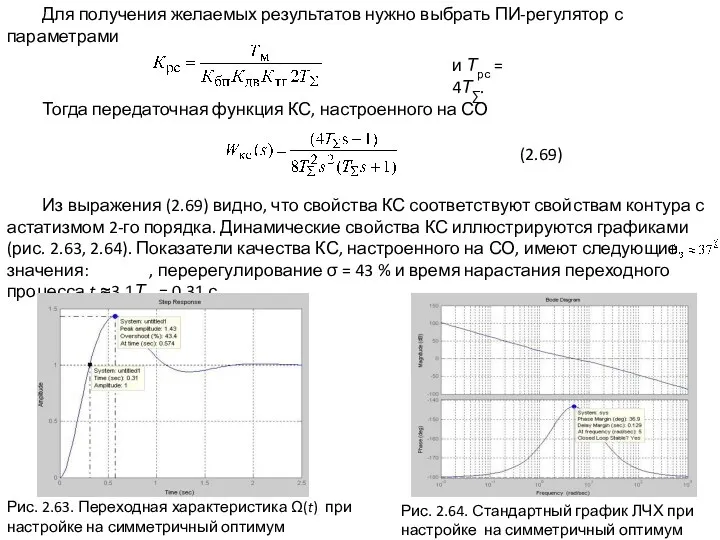
- 7. Рис. 2.60. Структурная схема динамической модели контура скорости Передаточная функция неизменяемой части КС запишется в виде
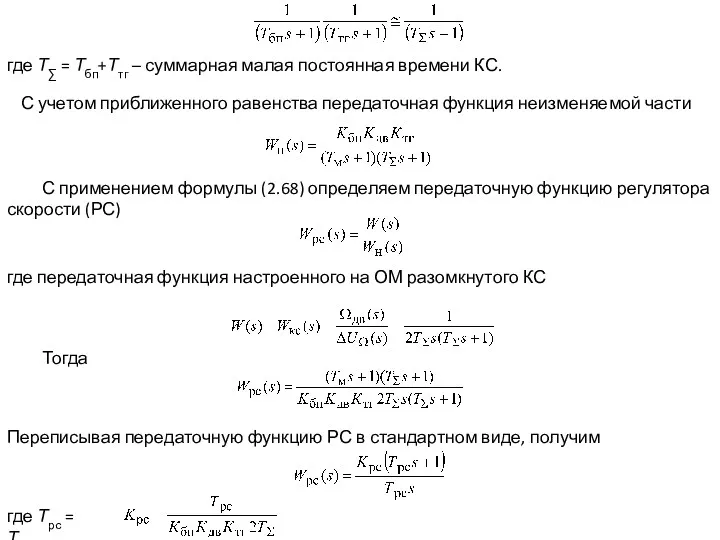
- 8. С учетом приближенного равенства передаточная функция неизменяемой части где Т∑ = Тбп+Ттг – суммарная малая постоянная
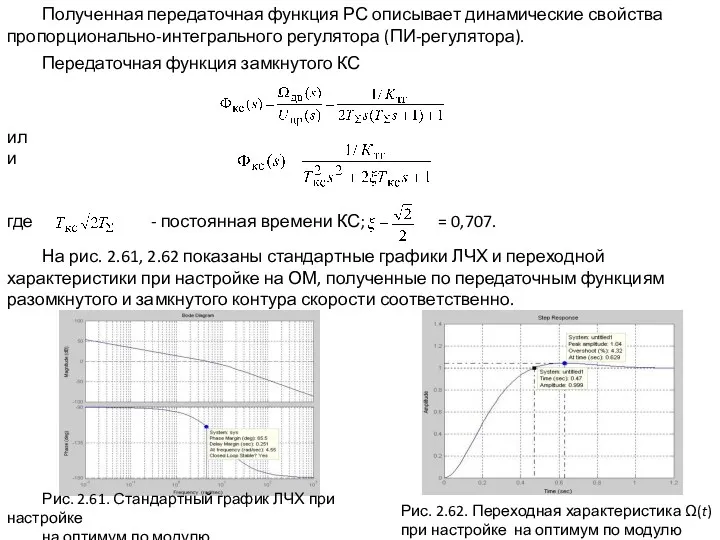
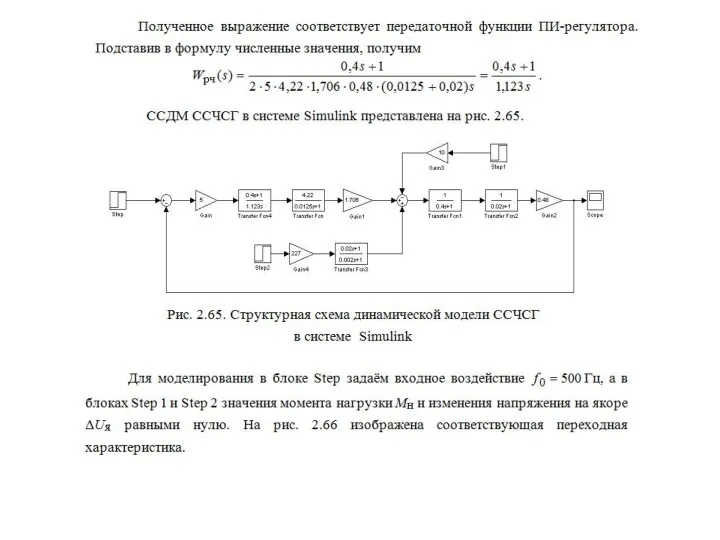
- 9. Полученная передаточная функция РС описывает динамические свойства пропорционально-интегрального регулятора (ПИ-регулятора). Передаточная функция замкнутого КС или где
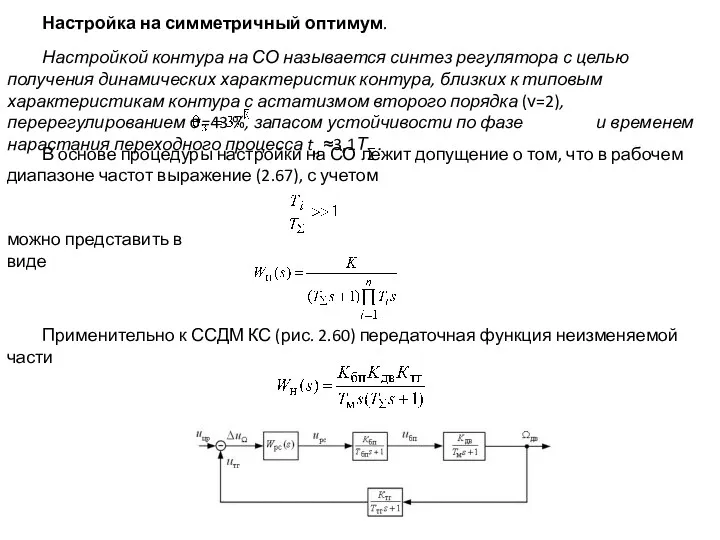
- 10. Рис. 2.61. Стандартный график ЛЧХ при настройке на оптимум по модулю Рис. 2.62. Переходная характеристика Ω(t)
- 11. Настройка на симметричный оптимум. Настройкой контура на СО называется синтез регулятора с целью получения динамических характеристик
- 12. Для получения желаемых результатов нужно выбрать ПИ-регулятор с параметрами и Трс = 4Т∑. Тогда передаточная функция
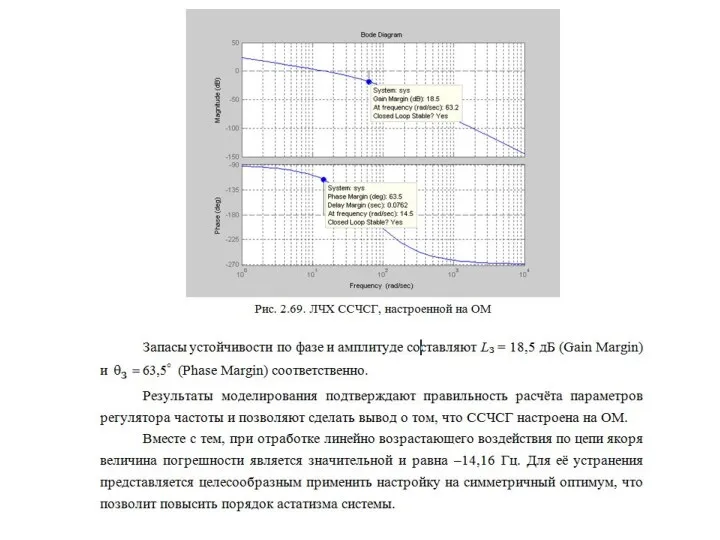
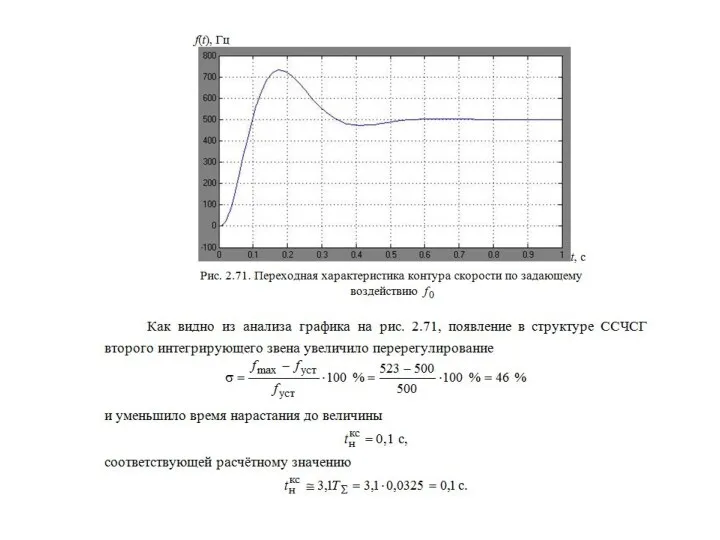
- 13. Пример 2.21. Синтезировать регулятор частоты, обеспечивающий настройку ССЧСГ на ОМ. Данные для расчёта принять из примера
- 23. Согласно ССДМ ССЧСГ принять следующие исходные данные: Киу = 5 В/Гц; Кu = 4,22; Ту.с.п. =
- 24. Рис. 2.70. Структурная схема динамической модели ССЧСГ, настроенной на симметричный оптимум
- 29. Скачать презентацию
Синтез САУ заключается в выборе структуры и параметров системы с целью
Синтез САУ заключается в выборе структуры и параметров системы с целью
На втором этапе устанавливается общая структурная схема САУ. В связи с
На втором этапе устанавливается общая структурная схема САУ. В связи с
Настройка на оптимум по модулю.
Настройкой контура на ОМ называется синтез регулятора
Настройка на оптимум по модулю.
Настройкой контура на ОМ называется синтез регулятора
При выполнении условия
второй сомножитель (2.66) можно записать как
где Тi – компенсируемые
При выполнении условия
второй сомножитель (2.66) можно записать как
где Тi – компенсируемые
(2.68)
После подстановки в (2.68) выражений (2.66) и (2.67), получим
или
где ; ;
(2.68)
После подстановки в (2.68) выражений (2.66) и (2.67), получим
или
где ; ;
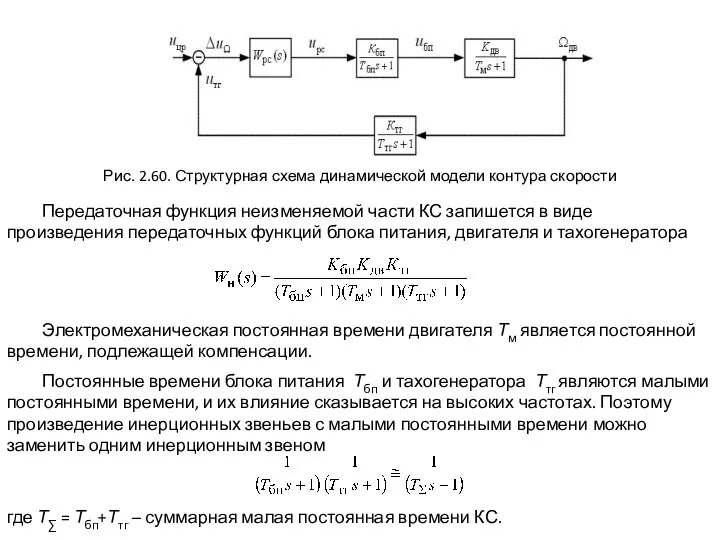
Рис. 2.60. Структурная схема динамической модели контура скорости
Передаточная функция неизменяемой части
Рис. 2.60. Структурная схема динамической модели контура скорости
Передаточная функция неизменяемой части
С учетом приближенного равенства передаточная функция неизменяемой части
где Т∑ = Тбп+Ттг
С учетом приближенного равенства передаточная функция неизменяемой части
где Т∑ = Тбп+Ттг
Полученная передаточная функция РС описывает динамические свойства пропорционально-интегрального регулятора (ПИ-регулятора).
Передаточная функция
Полученная передаточная функция РС описывает динамические свойства пропорционально-интегрального регулятора (ПИ-регулятора).
Передаточная функция
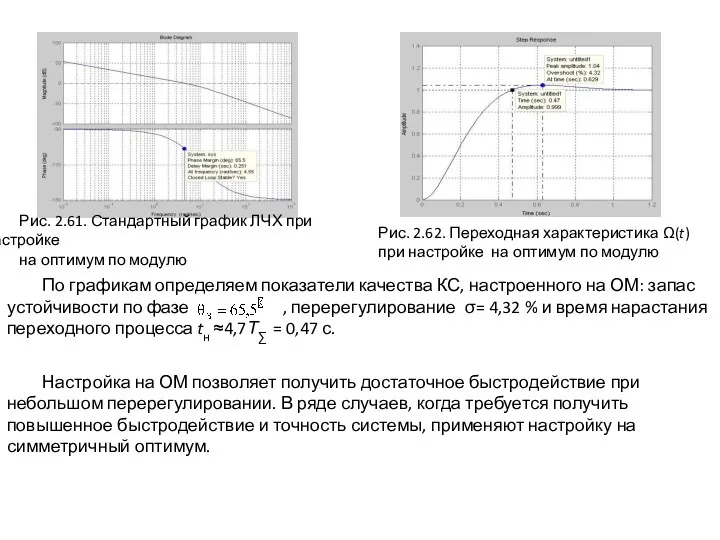
Рис. 2.61. Стандартный график ЛЧХ при настройке
на оптимум по модулю
Рис.
Рис. 2.61. Стандартный график ЛЧХ при настройке
на оптимум по модулю
Рис.
Настройка на симметричный оптимум.
Настройкой контура на СО называется синтез регулятора с
Настройка на симметричный оптимум.
Настройкой контура на СО называется синтез регулятора с
Для получения желаемых результатов нужно выбрать ПИ-регулятор с параметрами
и Трс =
Для получения желаемых результатов нужно выбрать ПИ-регулятор с параметрами
и Трс =
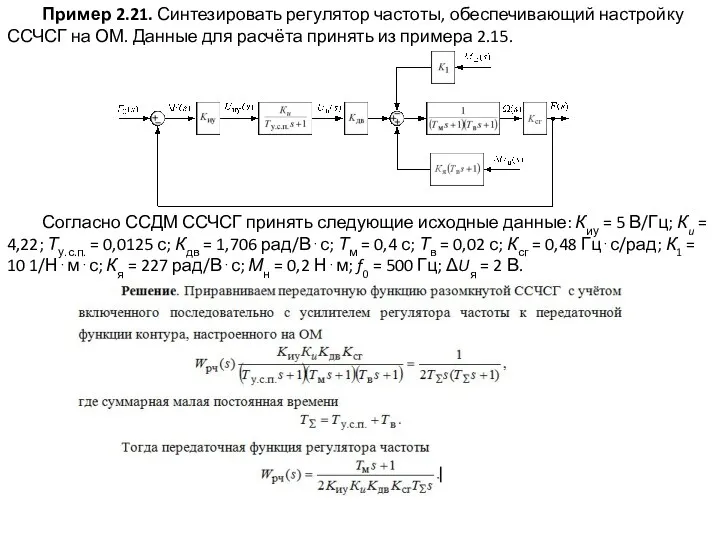
Пример 2.21. Синтезировать регулятор частоты, обеспечивающий настройку ССЧСГ на ОМ. Данные
Пример 2.21. Синтезировать регулятор частоты, обеспечивающий настройку ССЧСГ на ОМ. Данные
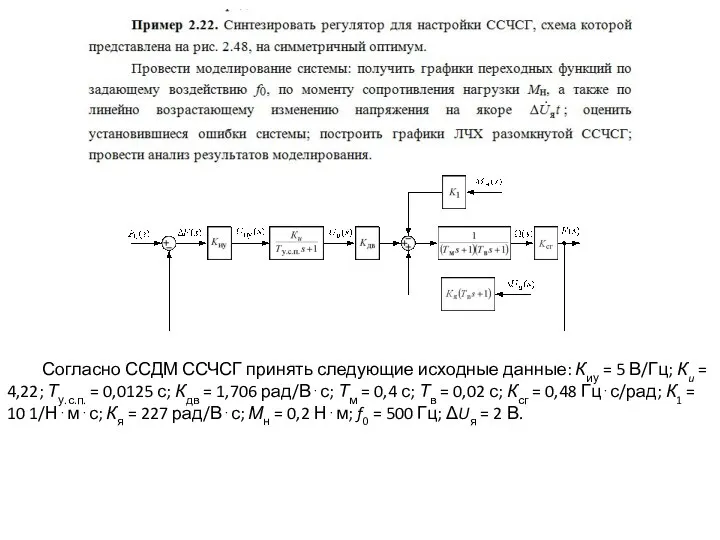
Согласно ССДМ ССЧСГ принять следующие исходные данные: Киу = 5 В/Гц;
Согласно ССДМ ССЧСГ принять следующие исходные данные: Киу = 5 В/Гц;
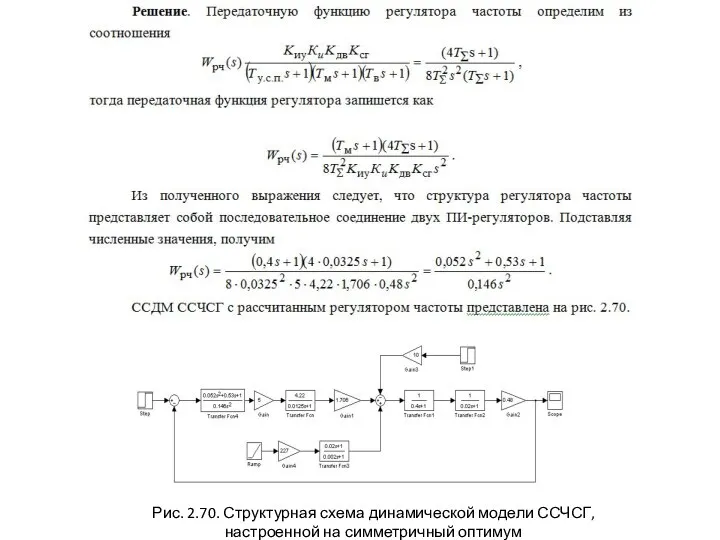
Рис. 2.70. Структурная схема динамической модели ССЧСГ,
настроенной на симметричный оптимум
Рис. 2.70. Структурная схема динамической модели ССЧСГ,
настроенной на симметричный оптимум
 Принцип Гюйгенса. Законы преломления и отражения. Скорость света
Принцип Гюйгенса. Законы преломления и отражения. Скорость света презентация для 9кл- физика
презентация для 9кл- физика КПД простых механизмов. 7 класс
КПД простых механизмов. 7 класс Лазеры: строение, свойства, основные виды
Лазеры: строение, свойства, основные виды Презентация к уроку Изменение агрегатных состояний вещества
Презентация к уроку Изменение агрегатных состояний вещества Детали машин и подъемное оборудование. Цепные передачи
Детали машин и подъемное оборудование. Цепные передачи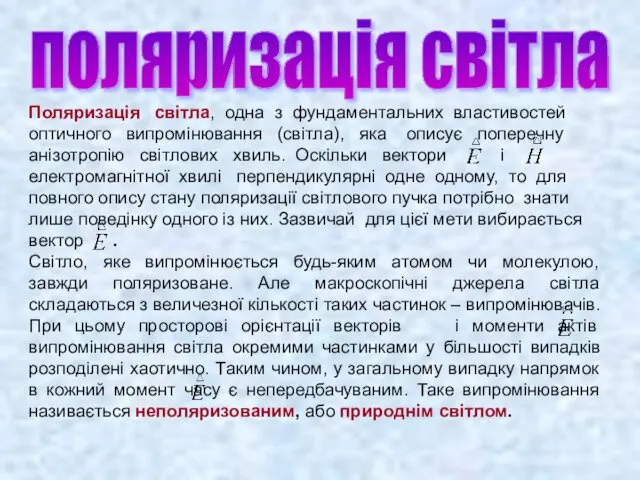 Поляризація світла
Поляризація світла Качественные задачи
Качественные задачи Твердая фаза и поровое пространство почв. Основная гидрофизическая характеристика
Твердая фаза и поровое пространство почв. Основная гидрофизическая характеристика Погрузочные работы на судах
Погрузочные работы на судах Физические основы оптической локации
Физические основы оптической локации Статические свойства атомных ядер. Ядерные модели
Статические свойства атомных ядер. Ядерные модели 20240125_ya_i_moy_nastavnik_2_
20240125_ya_i_moy_nastavnik_2_ Датчики температуры
Датчики температуры Сила тока. Измерение силы тока.
Сила тока. Измерение силы тока. Механические передачи. Зубчатые передачи
Механические передачи. Зубчатые передачи Отчет о прохождении производственной практики (по профилю специальности)
Отчет о прохождении производственной практики (по профилю специальности) Инструментальные методы исследования органических веществ
Инструментальные методы исследования органических веществ Физические основы механики
Физические основы механики Электрондық парамагнитті резонанс (ЭПР) әдісі
Электрондық парамагнитті резонанс (ЭПР) әдісі Презентация Характеристики звука.
Презентация Характеристики звука. Процессы переноса
Процессы переноса Физические величины и их математическая размерность
Физические величины и их математическая размерность Презентация к уроку в 5 классе по теме Дефекты зрения и оптические иллюзии
Презентация к уроку в 5 классе по теме Дефекты зрения и оптические иллюзии Реальный газ и его работа. (лекция 5в)
Реальный газ и его работа. (лекция 5в) УФ- и ИКспектроскопические методы анализа
УФ- и ИКспектроскопические методы анализа Петрофизика как прикладная наука
Петрофизика как прикладная наука Резьбовые соединения (РС)
Резьбовые соединения (РС)