Статически определимые системы (свойства, классификция). Многопролётные статически определимые балки презентация
- Статически определимые системы (свойства, классификция). Многопролётные статически определимые балки

Содержание
- 2. Статически определимой называется система, в которой для нахождения всех силовых факторов (реакций внешних и внутренних связей
- 3. РЕЗЮМЕ О СТАТИЧЕСКОЙ ОПРЕДЕЛИМОСТИ В строгом смысле, свойством статической определимости (или неопределимости) обладает не сама система,
- 4. Общие свойства статически определимых систем (СОС) 1. Все силовые факторы в статически определимой системе могут быть
- 5. ОСНОВНЫЕ ТИПЫ СТАТИЧЕСКИ ОПРЕДЕЛИМЫХ СИСТЕМ Многопролётные балки Фермы Арки Рамы Трёхшарнирные системы К о м б
- 6. МНОГОПРОЛЁТНЫЕ СТАТИЧЕСКИ ОПРЕДЕЛИМЫЕ БАЛКИ
- 7. Многопролётная балка – это геометрически неизменяемая система, состоящая из прямолинейных стержней – одного или нескольких, шарнирно
- 8. Основные структурные схемы многопролётных СО балок …ш-ш – о-о – ш-ш – о-о… …ш – о
- 9. Особенности работы МСОБ под нагрузками 1) нагрузка, приложенная к главной части, вызывает усилия (изгибающие моменты и
- 10. 1) нагрузка, приложенная к главной части, вызывает усилия (изгибающие моменты и поперечные силы) только в загруженной
- 11. Расчёт МСОБ на действие неподвижной (постоянной) нагрузки – п р и м е р ГЧ1 УГЧ2
- 12. Расчёт МСОБ на действие неподвижной (постоянной) нагрузки – п р и м е р ГЧ1 УГЧ2
- 13. Расчёт МСОБ на действие неподвижной (постоянной) нагрузки – п р и м е р ГЧ1 УГЧ2
- 14. Расчёт МСОБ на действие неподвижной (постоянной) нагрузки – п р и м е р ГЧ1 УГЧ2
- 15. Расчёт МСОБ на действие неподвижной (постоянной) нагрузки – п р и м е р ГЧ1 УГЧ2
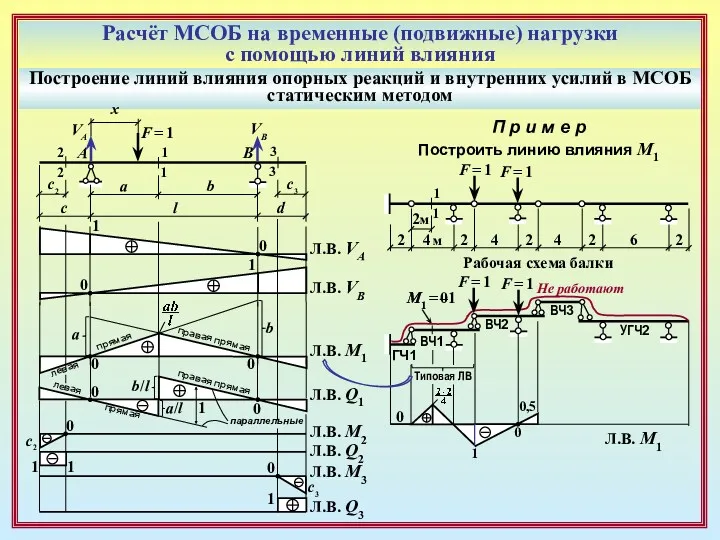
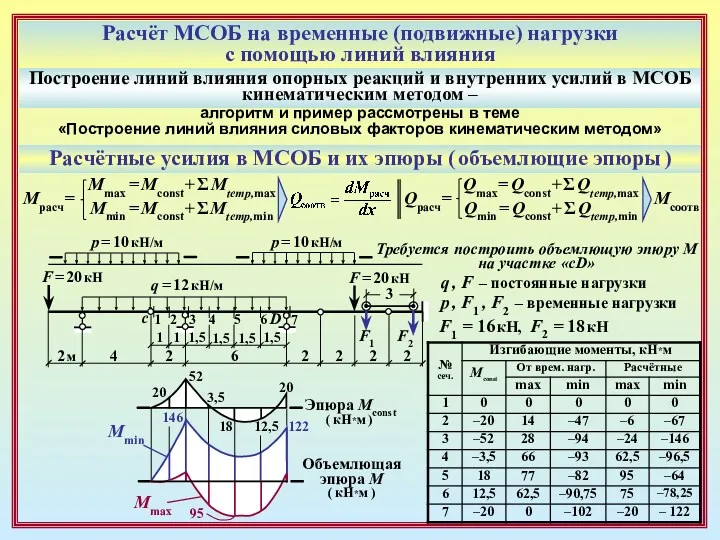
- 16. Расчёт МСОБ на временные (подвижные) нагрузки с помощью линий влияния Построение линий влияния опорных реакций и
- 17. Расчёт МСОБ на временные (подвижные) нагрузки с помощью линий влияния Построение линий влияния опорных реакций и
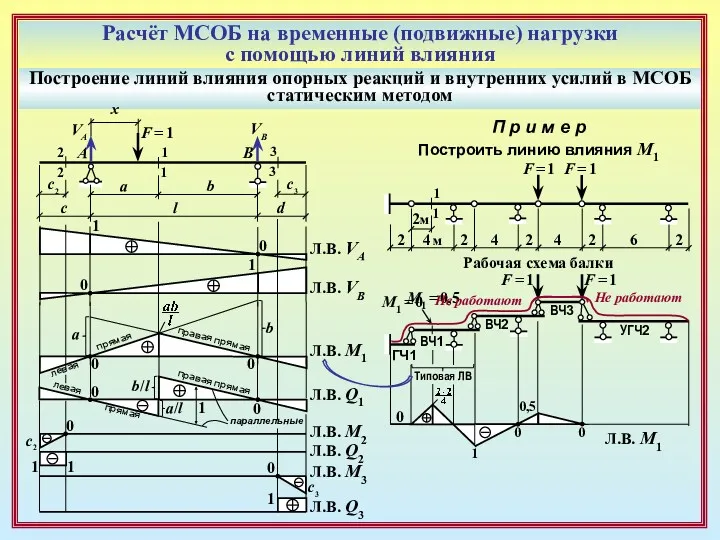
- 18. Расчёт МСОБ на временные (подвижные) нагрузки с помощью линий влияния Построение линий влияния опорных реакций и
- 19. Расчёт МСОБ на временные (подвижные) нагрузки с помощью линий влияния Построение линий влияния опорных реакций и
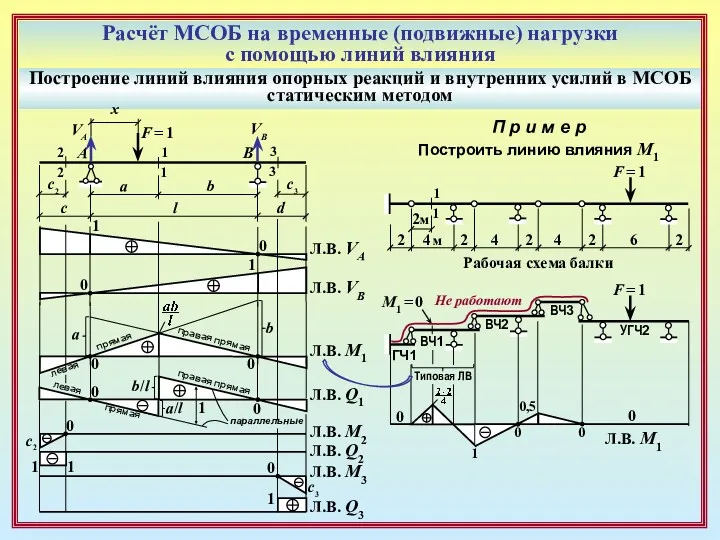
- 20. Расчёт МСОБ на временные (подвижные) нагрузки с помощью линий влияния Построение линий влияния опорных реакций и
- 21. Расчёт МСОБ на временные (подвижные) нагрузки с помощью линий влияния Построение линий влияния опорных реакций и
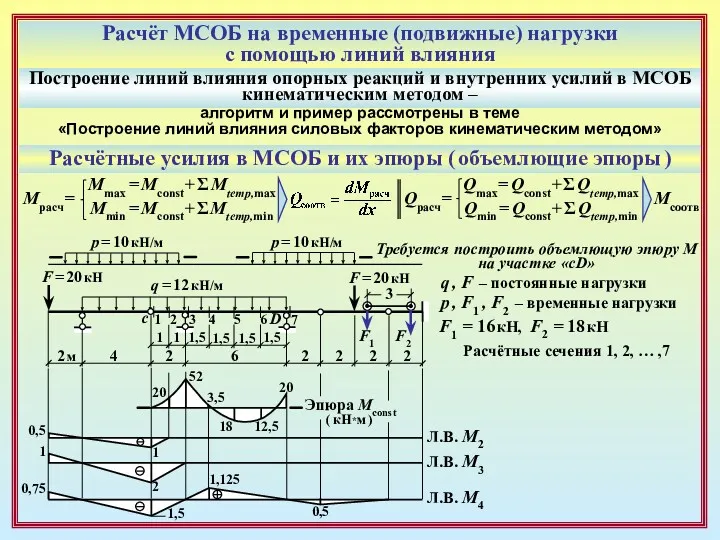
- 22. Расчёт МСОБ на временные (подвижные) нагрузки с помощью линий влияния Построение линий влияния опорных реакций и
- 23. Расчёт МСОБ на временные (подвижные) нагрузки с помощью линий влияния Построение линий влияния опорных реакций и
- 24. Расчёт МСОБ на временные (подвижные) нагрузки с помощью линий влияния Построение линий влияния опорных реакций и
- 25. К о н т р о л ь н ы е в о п р о
- 27. Скачать презентацию

Статически определимой называется система,
в которой для нахождения всех силовых факторов
Статически определимой называется система,
в которой для нахождения всех силовых факторов
РЕЗЮМЕ О СТАТИЧЕСКОЙ ОПРЕДЕЛИМОСТИ
В строгом смысле, свойством статической определимости
(или неопределимости)
РЕЗЮМЕ О СТАТИЧЕСКОЙ ОПРЕДЕЛИМОСТИ
В строгом смысле, свойством статической определимости
(или неопределимости)
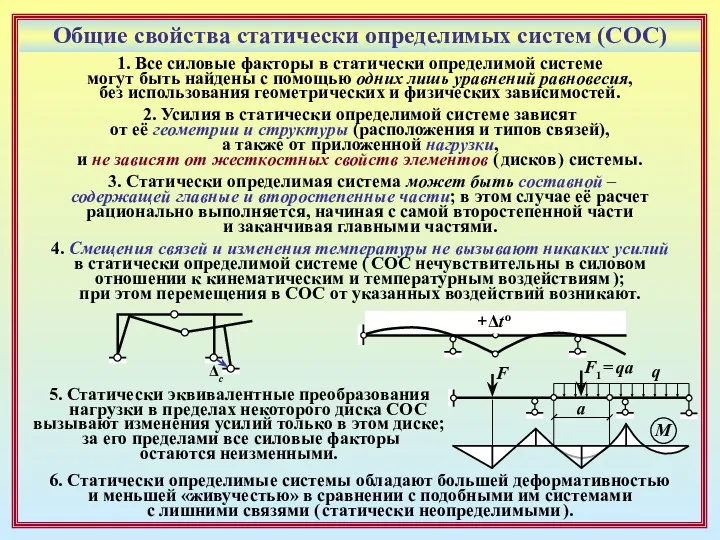
Общие свойства статически определимых систем (СОС)
1. Все силовые факторы в статически
Общие свойства статически определимых систем (СОС)
1. Все силовые факторы в статически
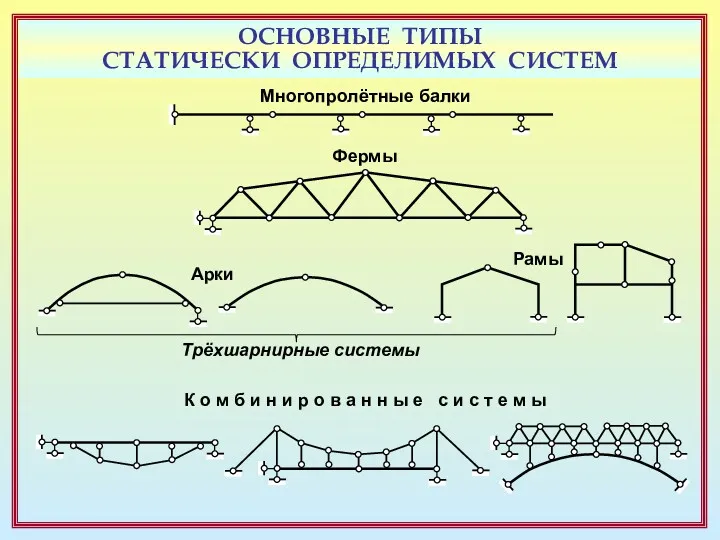
ОСНОВНЫЕ ТИПЫ
СТАТИЧЕСКИ ОПРЕДЕЛИМЫХ СИСТЕМ
Многопролётные балки
Фермы
Арки
Рамы
Трёхшарнирные системы
К о м б и
ОСНОВНЫЕ ТИПЫ
СТАТИЧЕСКИ ОПРЕДЕЛИМЫХ СИСТЕМ
Многопролётные балки
Фермы
Арки
Рамы
Трёхшарнирные системы
К о м б и
МНОГОПРОЛЁТНЫЕ
СТАТИЧЕСКИ ОПРЕДЕЛИМЫЕ
БАЛКИ
МНОГОПРОЛЁТНЫЕ
СТАТИЧЕСКИ ОПРЕДЕЛИМЫЕ
БАЛКИ

Многопролётная балка – это геометрически неизменяемая система,
состоящая из прямолинейных стержней
Многопролётная балка – это геометрически неизменяемая система,
состоящая из прямолинейных стержней
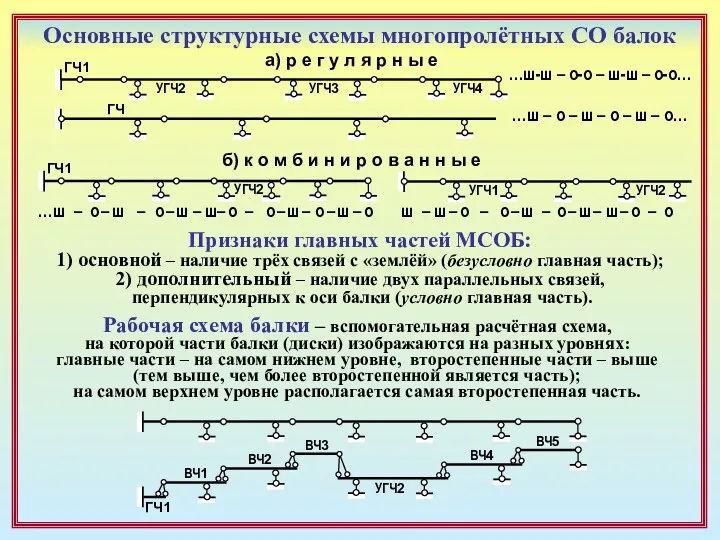
Основные структурные схемы многопролётных СО балок
…ш-ш – о-о – ш-ш –
Основные структурные схемы многопролётных СО балок
…ш-ш – о-о – ш-ш –

Особенности работы МСОБ под нагрузками
1) нагрузка, приложенная к главной части, вызывает
Особенности работы МСОБ под нагрузками
1) нагрузка, приложенная к главной части, вызывает
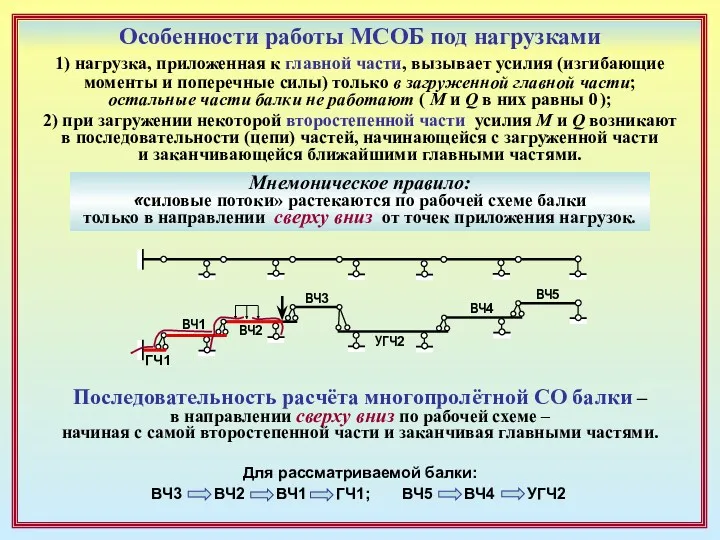
1) нагрузка, приложенная к главной части, вызывает усилия (изгибающие
моменты и поперечные
1) нагрузка, приложенная к главной части, вызывает усилия (изгибающие
моменты и поперечные
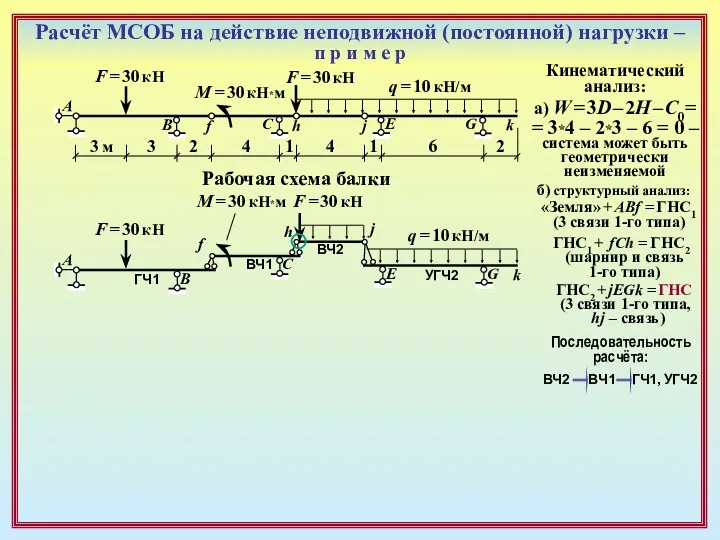
Расчёт МСОБ на действие неподвижной (постоянной) нагрузки – п р и
Расчёт МСОБ на действие неподвижной (постоянной) нагрузки – п р и

Расчёт МСОБ на действие неподвижной (постоянной) нагрузки – п р и
Расчёт МСОБ на действие неподвижной (постоянной) нагрузки – п р и

Расчёт МСОБ на действие неподвижной (постоянной) нагрузки – п р и
Расчёт МСОБ на действие неподвижной (постоянной) нагрузки – п р и

Расчёт МСОБ на действие неподвижной (постоянной) нагрузки – п р и
Расчёт МСОБ на действие неподвижной (постоянной) нагрузки – п р и

Расчёт МСОБ на действие неподвижной (постоянной) нагрузки – п р и
Расчёт МСОБ на действие неподвижной (постоянной) нагрузки – п р и
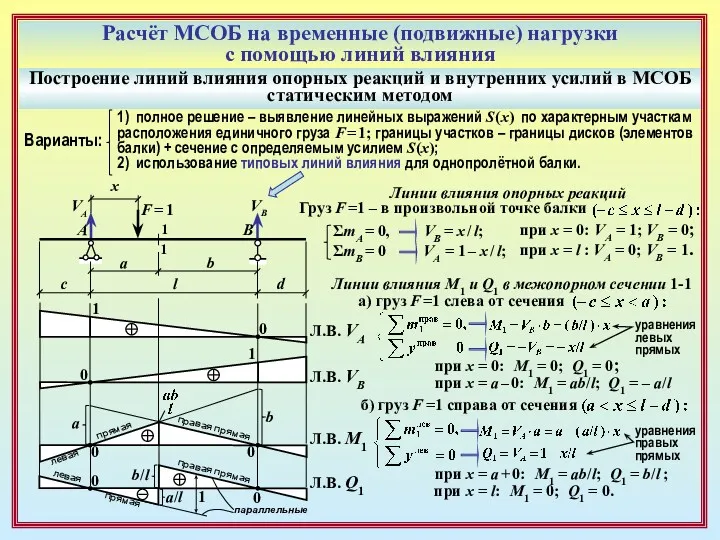
Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий
Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий

Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий
Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий

Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий
Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий
Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий
Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий
Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий
Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий
Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий
Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий
Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий
Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий

Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий
Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий
Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий
Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий
К о н т р о л ь н ы е
К о н т р о л ь н ы е
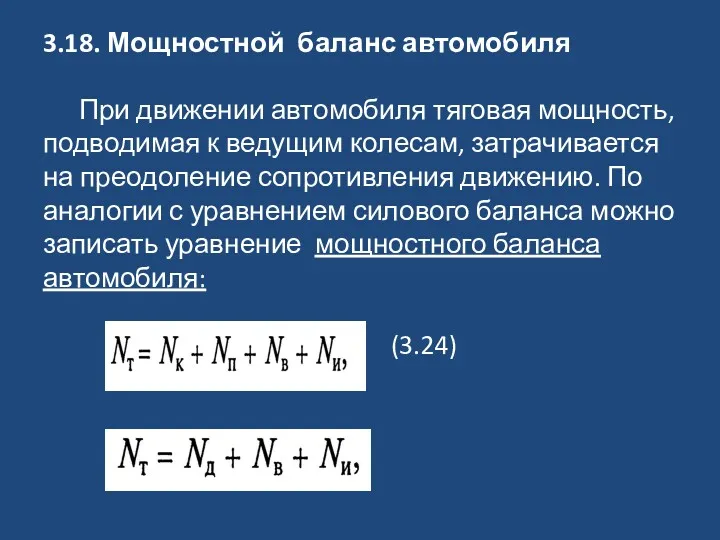 Мощностной баланс автомобиля
Мощностной баланс автомобиля Конденсаторы
Конденсаторы Визуальная, квантовая физика
Визуальная, квантовая физика Техническое обслуживание, диагностирование и ремонт газораспределительного механизма автомобиля
Техническое обслуживание, диагностирование и ремонт газораспределительного механизма автомобиля Электрооборудование автомобилей. Системы автоматического управления оборудованием автомобиля. (Урок 12)
Электрооборудование автомобилей. Системы автоматического управления оборудованием автомобиля. (Урок 12) Влияние предварительной деформации на эффект памяти формы в интерметаллиде TiNi
Влияние предварительной деформации на эффект памяти формы в интерметаллиде TiNi Отличия квантовой статистики от классической
Отличия квантовой статистики от классической Люмінесценція і її застосування. (Тема 1)
Люмінесценція і її застосування. (Тема 1) Конвекция. Ламинарный тепловой погранслой при вынужденном движении жидкости вдоль плоской поверхности. (Тема 2. Лекции 8,9)
Конвекция. Ламинарный тепловой погранслой при вынужденном движении жидкости вдоль плоской поверхности. (Тема 2. Лекции 8,9) Теплообмен излучением
Теплообмен излучением Основы молекулярно-кинетической теории
Основы молекулярно-кинетической теории Применение первого закона термодинамики к различным процессам
Применение первого закона термодинамики к различным процессам Проектная деятельность на уроках физики в 7 классе
Проектная деятельность на уроках физики в 7 классе Защита от ионизирующих излучений
Защита от ионизирующих излучений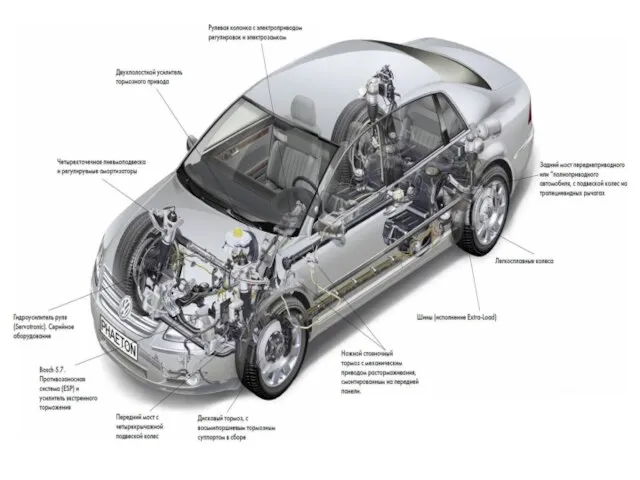 Ходовая автомобиля
Ходовая автомобиля Плотность вещества
Плотность вещества Подшипники качения
Подшипники качения Электронагревательные приборы. Из истории изобретения электрической лампы накаливания
Электронагревательные приборы. Из истории изобретения электрической лампы накаливания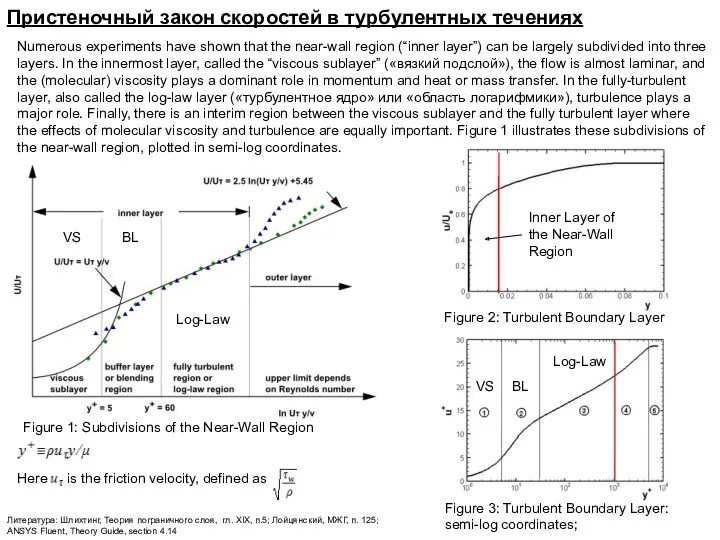 Пристеночный закон скоростей в турбулентных течениях
Пристеночный закон скоростей в турбулентных течениях Аэрогазодинамика. Плоские изоэнтропические течения газа (лекции 8, 9)
Аэрогазодинамика. Плоские изоэнтропические течения газа (лекции 8, 9) Опыт Резерфорда
Опыт Резерфорда Токарно-винторезный станок мод. 16К20
Токарно-винторезный станок мод. 16К20 Рулевое управление. Устройство автомобиля
Рулевое управление. Устройство автомобиля Прості механізми
Прості механізми Хроматография. (Лекция 4)
Хроматография. (Лекция 4) Реактивное движение
Реактивное движение Презентация к уроку в 7 классе по теме Масса тела.Измерение массы тела с помощью весов
Презентация к уроку в 7 классе по теме Масса тела.Измерение массы тела с помощью весов Реактивное движение. Ракеты
Реактивное движение. Ракеты