- Статика

Содержание
- 2. Новосибирский Государственный Архитектурно- Строительный Университет (Сибстрин) Кафедра теоретической механики 2 Лекция 1. Аксиомы статики Механика –
- 3. Владимир Иванович Даль 3
- 4. Цель лекции 4 Формулировка основных понятий статики и ее аксиом План лекции 1.1. Введение 1.2. Основные
- 5. 1.1. Введение
- 6. 1.1.1. Предмет теоретической механики 1.1. ВВЕДЕНИЕ 5 Теоретическая механика изучает движение и равновесие системы материальных тел
- 7. 1.1.2. Курс ТМ включает 1.1. ВВЕДЕНИЕ 6 Кинематику Динамика отвечает на основной вопрос курса – из-за
- 8. Теоретическая механика Гидромеханика Аэромеханика Гидравлика Статистическая механика Аналитическая механика Квантовая механика Механика дефор-мируемого тела Сопротивление материалов
- 9. 1.1.4. Основные задачи статики 1.1. ВВЕДЕНИЕ 8 Есть и другие задачи: (i) определение условий устойчивости движения
- 10. 1.2. Модели и основные понятия
- 11. 1.2.1. Материальная точка и твердое тело 1.2. ОСНОВНЫЕ ПОНЯТИЯ И МОДЕЛИ 1.2. МОДЕЛИ И ОСНОВНЫЕ ПОНЯТИЯ
- 12. Деформируемое тело – система взаимодействующих материальных точек, расстояние между которыми с течением времени меняется Механическая система
- 13. Z Y A O y z 1.2.3. Задание положения точки Положение точки (тела) понятие относительное Чтобы
- 14. Сила – векторная величина, характеризующая меру взаимодействия материальных объектов (тел) Силы возникают при непосредственном контакте тел
- 15. Z Y O 1.2.5. Аналитическое задание силы 1.2. ОСНОВНЫЕ ПОНЯТИЯ И МОДЕЛИ X
- 16. 1.2.6. Система сил 1.2. ОСНОВНЫЕ ПОНЯТИЯ И МОДЕЛИ Совокупность нескольких сил, , называется системой сил Если
- 17. 1.2.7. Эквивалентные силы 1.2. ОСНОВНЫЕ ПОНЯТИЯ И МОДЕЛИ Два произвольных вектора равны, если они параллельны направлены
- 18. 1.3. Аксиомы статики
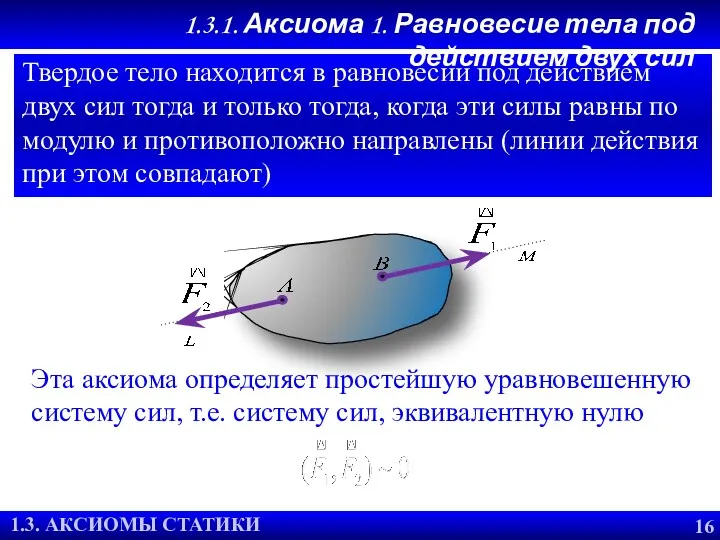
- 19. 1.3.АКСИОМЫ СТАТИКИ Твердое тело находится в равновесии под действием двух сил тогда и только тогда, когда
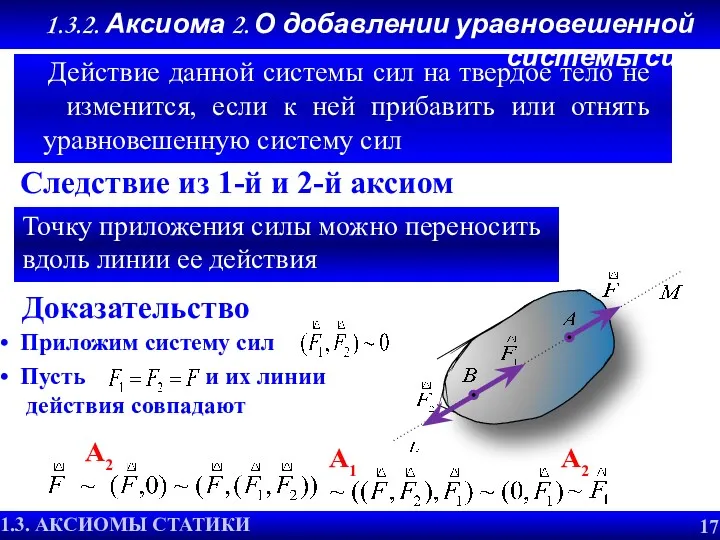
- 20. 1.3. АКСИОМЫ СТАТИКИ 1.3.2. Аксиома 2. О добавлении уравновешенной системы сил Действие данной системы сил на
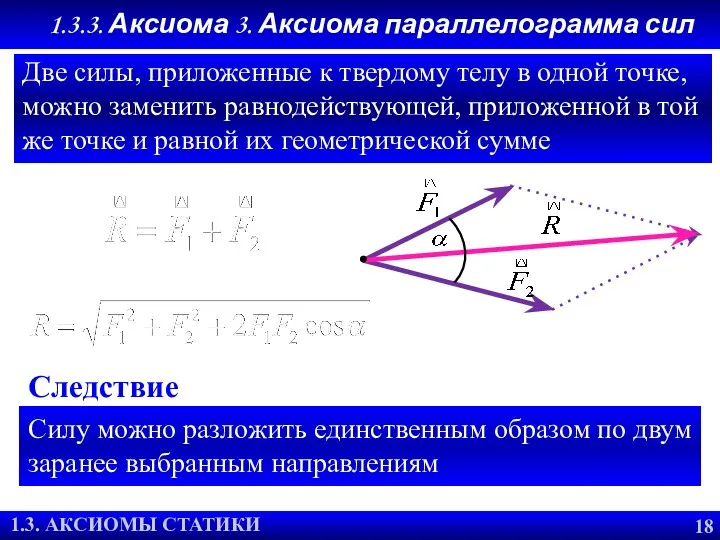
- 21. 1.3. АКСИОМЫ СТАТИКИ Две силы, приложенные к твердому телу в одной точке, можно заменить равнодействующей, приложенной
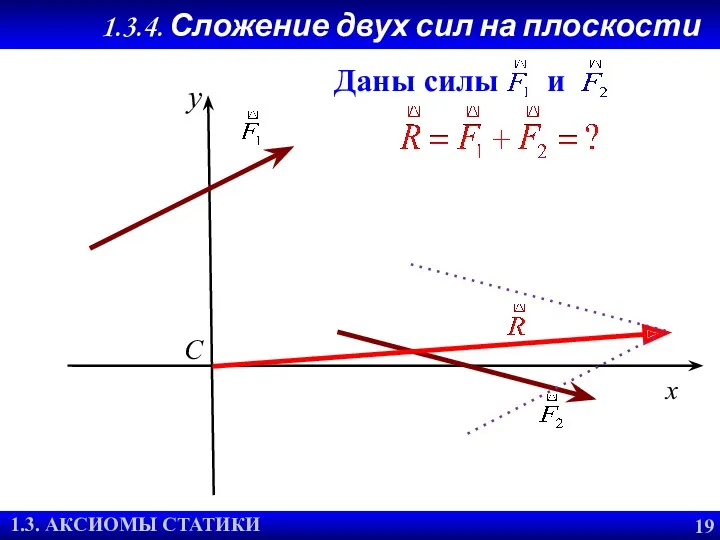
- 22. у 1.3.4. Сложение двух сил на плоскости 1.3. АКСИОМЫ СТАТИКИ C x Даны силы и
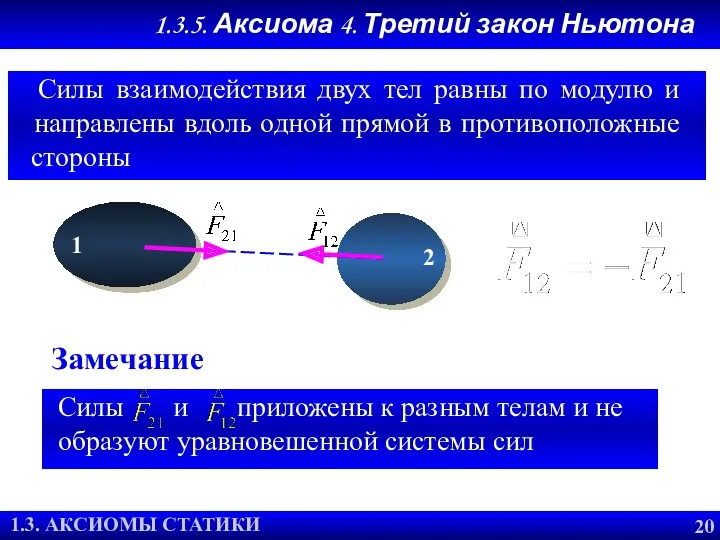
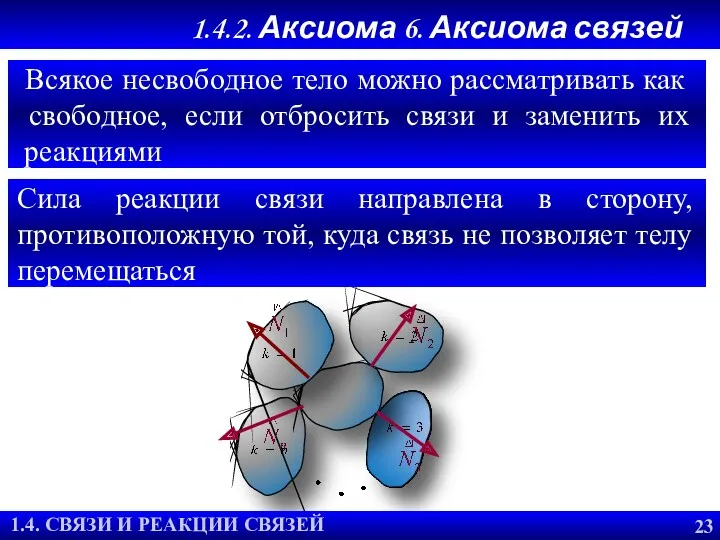
- 23. 1.3. АКСИОМЫ СТАТИКИ Силы взаимодействия двух тел равны по модулю и направлены вдоль одной прямой в
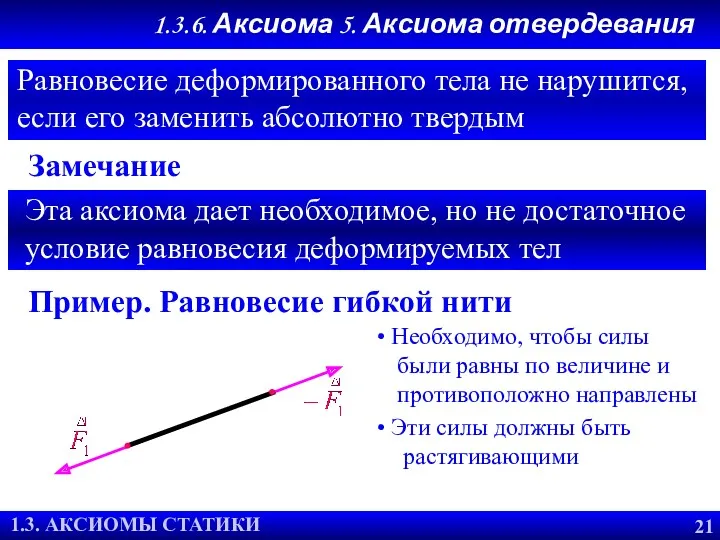
- 24. 1.3. АКСИОМЫ СТАТИКИ Равновесие деформированного тела не нарушится, если его заменить абсолютно твердым Пример. Равновесие гибкой
- 25. 1.4. Связи и реакции связей
- 26. 1.3. АКСИОМЫ СТАТИКИ Механическая система называется свободной, если ее перемещения (положения и/или скорости) ничем не ограничены
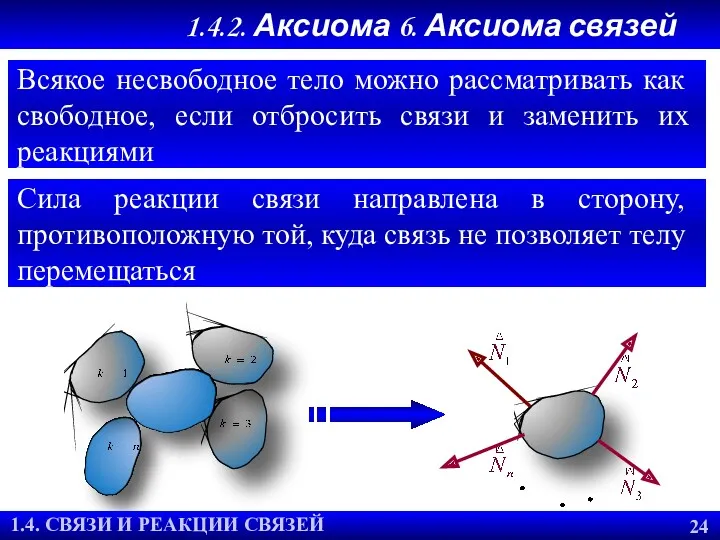
- 27. 1.4. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ 1.4.2. Аксиома 6. Аксиома связей Всякое несвободное тело можно рассматривать как
- 28. 1.4. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ 1.4.2. Аксиома 6. Аксиома связей Всякое несвободное тело можно рассматривать как
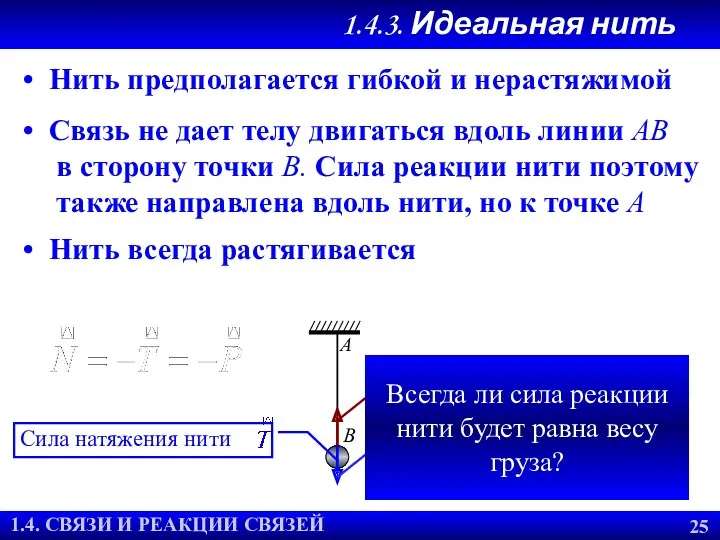
- 29. 1.4.3. Идеальная нить 1.4. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ A B Сила реакции нити Сила натяжения нити
- 30. 1.4.3. Идеальная нить 1.4. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ
- 31. 1.4.4. Гладкая поверхность 1.4. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ Гладкая поверхность не дает перемещаться телу, на которое
- 32. 1.4.5. Гладкая поверхность с угловой точкой 1.4. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ Реакция гладкой поверхности с угловой
- 33. 1.4.6. Подвижная цилиндрическая опора (катки) 1.4. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ В строительной практике широко используется подвижная
- 34. 1.4.7. Неподвижный цилиндрический шарнир 1.4. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ Цилиндрический шарнир в простейшем случае представляет собой
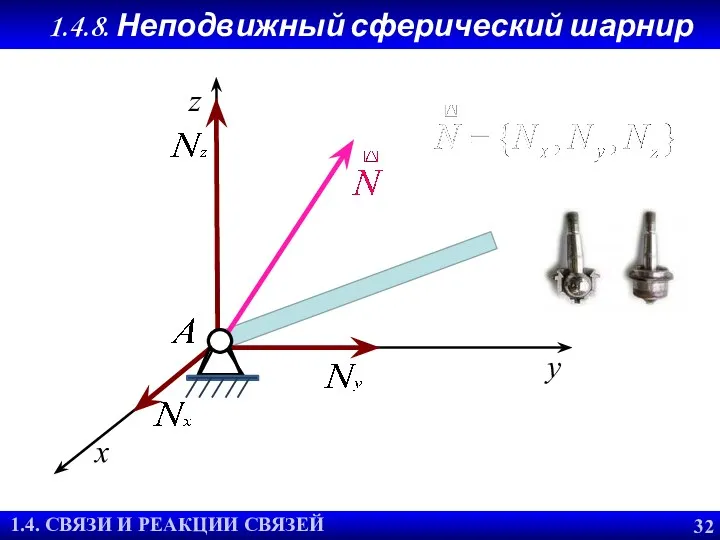
- 35. х у z 1.4.8. Неподвижный сферический шарнир 1.4. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ
- 36. 1.4.9. Подпятник (подшипник с упором) 1.4. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ Сила реакции подшипника может быть как
- 37. 1.4.9. Идеальный стержень В Стержень не позволяет закрепленному с его помощью телу двигаться вдоль него, поэтому
- 38. 1.3. АКСИОМЫ СТАТИКИ Статика – наука аксиоматичная На основе аксиом статики формулируется ряд теорем, которые и
- 39. 1.3. АКСИОМЫ СТАТИКИ Рудяк В.Я., Юдин В.А. Лекции по теоретической механике. Часть I. Статика и кинематика.
- 40. 1.5.3. Тема следующей лекции 1.3. АКСИОМЫ СТАТИКИ СИСТЕМА СХОДЯЩИХСЯ СИЛ
- 42. Скачать презентацию
Новосибирский Государственный Архитектурно-
Строительный Университет (Сибстрин)
Кафедра теоретической механики
2
Лекция 1.
Аксиомы статики
Механика – искусство
Новосибирский Государственный Архитектурно-
Строительный Университет (Сибстрин)
Кафедра теоретической механики
2
Лекция 1.
Аксиомы статики
Механика – искусство
Владимир Иванович Даль
3
Владимир Иванович Даль
3
Цель лекции
4
Формулировка основных понятий статики и ее аксиом
План лекции
1.1.
Цель лекции
4
Формулировка основных понятий статики и ее аксиом
План лекции
1.1.
1.1. Введение
1.1. Введение
1.1.1. Предмет теоретической механики
1.1. ВВЕДЕНИЕ
5
Теоретическая механика изучает движение
1.1.1. Предмет теоретической механики
1.1. ВВЕДЕНИЕ
5
Теоретическая механика изучает движение
1.1.2. Курс ТМ включает
1.1. ВВЕДЕНИЕ
6
Кинематику
Динамика отвечает на основной
1.1.2. Курс ТМ включает
1.1. ВВЕДЕНИЕ
6
Кинематику
Динамика отвечает на основной

Теоретическая механика
Гидромеханика
Аэромеханика
Гидравлика
Статистическая механика
Теоретическая механика
Гидромеханика
Аэромеханика
Гидравлика
Статистическая механика
1.1.4. Основные задачи статики
1.1. ВВЕДЕНИЕ
8
Есть и другие задачи: (i)
1.1.4. Основные задачи статики
1.1. ВВЕДЕНИЕ
8
Есть и другие задачи: (i)
1.2. Модели и основные понятия
1.2. Модели и основные понятия
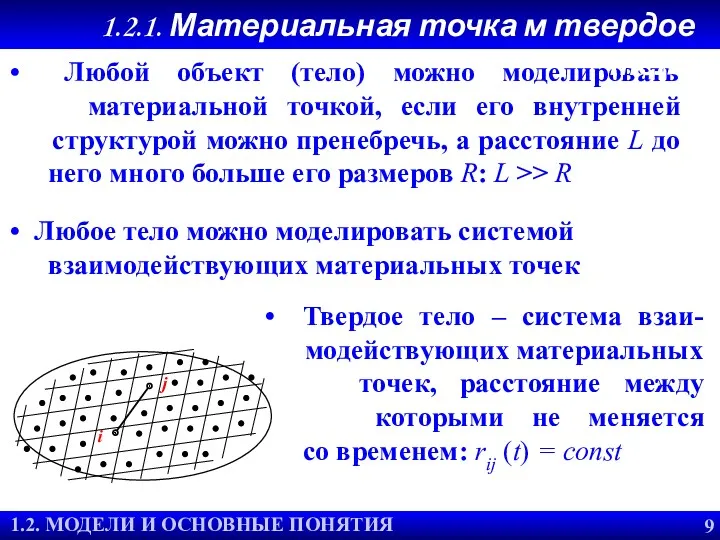
1.2.1. Материальная точка и твердое тело
1.2. ОСНОВНЫЕ ПОНЯТИЯ И МОДЕЛИ
1.2.
1.2.1. Материальная точка и твердое тело
1.2. ОСНОВНЫЕ ПОНЯТИЯ И МОДЕЛИ
1.2.
Деформируемое тело – система взаимодействующих
материальных точек, расстояние между которыми
Деформируемое тело – система взаимодействующих материальных точек, расстояние между которыми
Z
Y
A
O
y
z
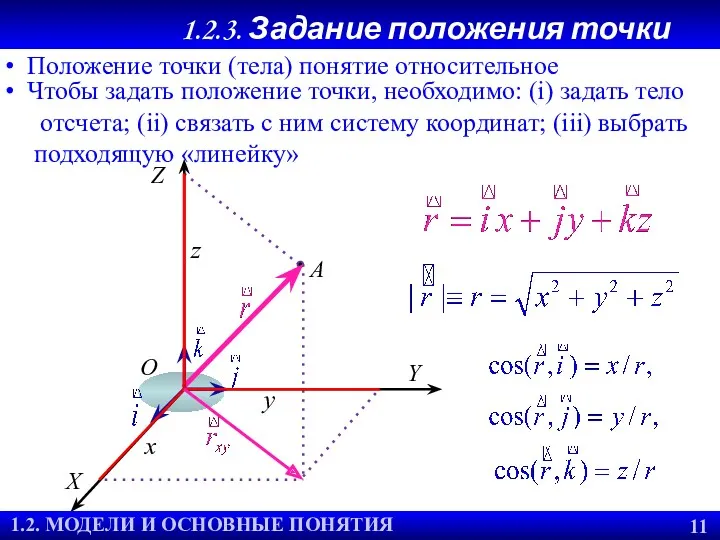
1.2.3. Задание положения точки
Положение точки (тела) понятие относительное
Чтобы задать
Z
Y
A
O
y
z
1.2.3. Задание положения точки
Положение точки (тела) понятие относительное
Чтобы задать
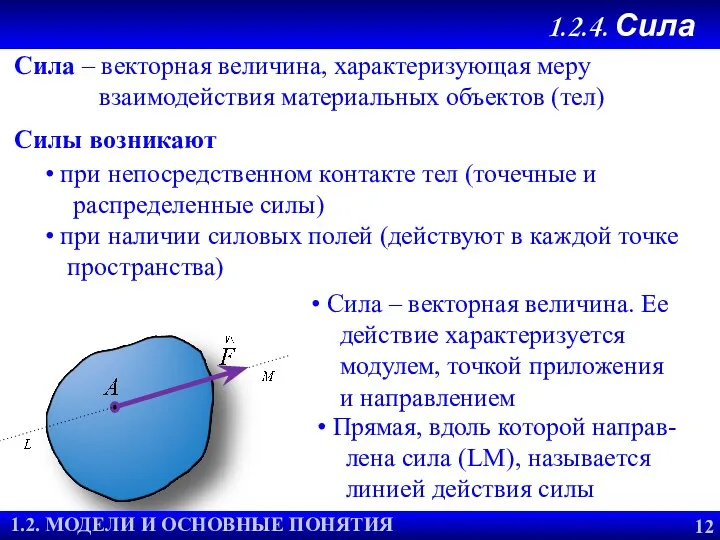
Сила – векторная величина, характеризующая меру
взаимодействия материальных объектов (тел)
Силы возникают
Сила – векторная величина, характеризующая меру
взаимодействия материальных объектов (тел)
Силы возникают
Z
Y
O
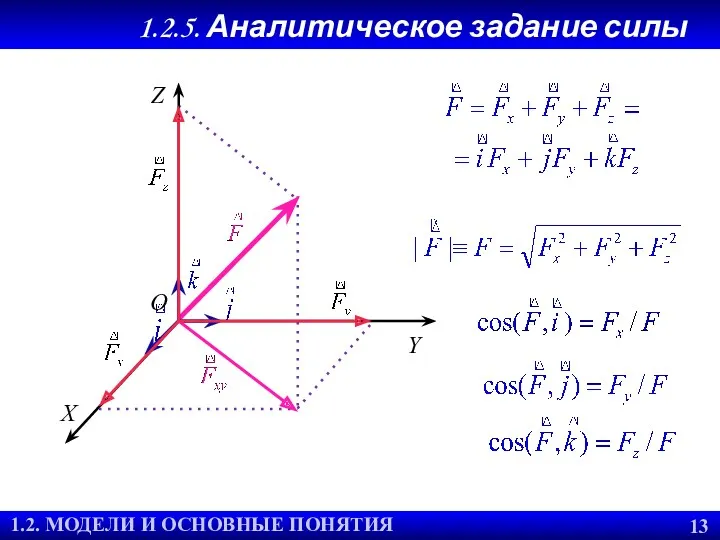
1.2.5. Аналитическое задание силы
1.2. ОСНОВНЫЕ ПОНЯТИЯ И МОДЕЛИ
X
Z
Y
O
1.2.5. Аналитическое задание силы
1.2. ОСНОВНЫЕ ПОНЯТИЯ И МОДЕЛИ
X
1.2.6. Система сил
1.2. ОСНОВНЫЕ ПОНЯТИЯ И МОДЕЛИ
Совокупность нескольких сил, ,
1.2.6. Система сил
1.2. ОСНОВНЫЕ ПОНЯТИЯ И МОДЕЛИ
Совокупность нескольких сил, ,
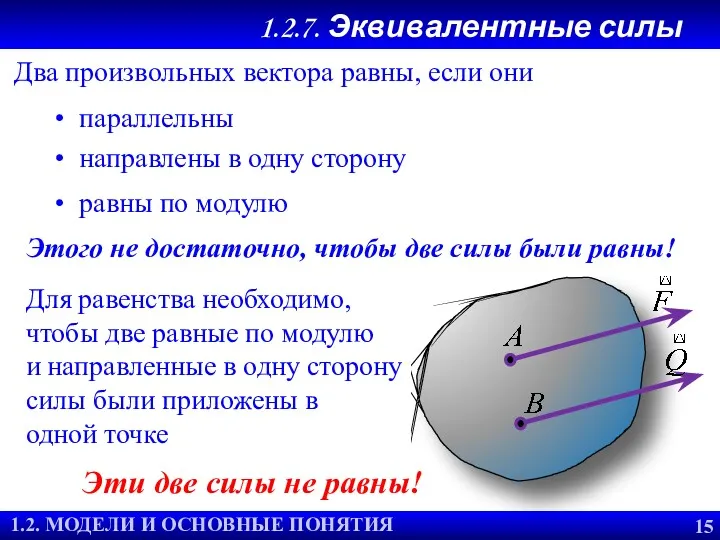
1.2.7. Эквивалентные силы
1.2. ОСНОВНЫЕ ПОНЯТИЯ И МОДЕЛИ
Два произвольных вектора равны, если
1.2.7. Эквивалентные силы
1.2. ОСНОВНЫЕ ПОНЯТИЯ И МОДЕЛИ
Два произвольных вектора равны, если
1.3. Аксиомы статики
1.3. Аксиомы статики
1.3.АКСИОМЫ СТАТИКИ
Твердое тело находится в равновесии под действием двух сил
1.3.АКСИОМЫ СТАТИКИ
Твердое тело находится в равновесии под действием двух сил
1.3. АКСИОМЫ СТАТИКИ
1.3.2. Аксиома 2. О добавлении уравновешенной системы сил
1.3. АКСИОМЫ СТАТИКИ
1.3.2. Аксиома 2. О добавлении уравновешенной системы сил
1.3. АКСИОМЫ СТАТИКИ
Две силы, приложенные к твердому телу в одной
1.3. АКСИОМЫ СТАТИКИ
Две силы, приложенные к твердому телу в одной
у
1.3.4. Сложение двух сил на плоскости
1.3. АКСИОМЫ СТАТИКИ
C
x
Даны силы и
у
1.3.4. Сложение двух сил на плоскости
1.3. АКСИОМЫ СТАТИКИ
C
x
Даны силы и
1.3. АКСИОМЫ СТАТИКИ
Силы взаимодействия двух тел равны по модулю
1.3. АКСИОМЫ СТАТИКИ
Силы взаимодействия двух тел равны по модулю
1.3. АКСИОМЫ СТАТИКИ
Равновесие деформированного тела не нарушится, если его заменить
1.3. АКСИОМЫ СТАТИКИ
Равновесие деформированного тела не нарушится, если его заменить
1.4. Связи и реакции связей
1.4. Связи и реакции связей
1.3. АКСИОМЫ СТАТИКИ
Механическая система называется свободной,
если ее перемещения
1.3. АКСИОМЫ СТАТИКИ
Механическая система называется свободной, если ее перемещения
1.4. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ
1.4.2. Аксиома 6. Аксиома связей
1.4. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ
1.4.2. Аксиома 6. Аксиома связей
1.4. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ
1.4.2. Аксиома 6. Аксиома связей
Всякое несвободное
1.4. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ
1.4.2. Аксиома 6. Аксиома связей
Всякое несвободное
1.4.3. Идеальная нить
1.4. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ
A
B
Сила реакции
1.4.3. Идеальная нить
1.4. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ
A
B
Сила реакции
1.4.3. Идеальная нить
1.4. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ
1.4.3. Идеальная нить
1.4. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ
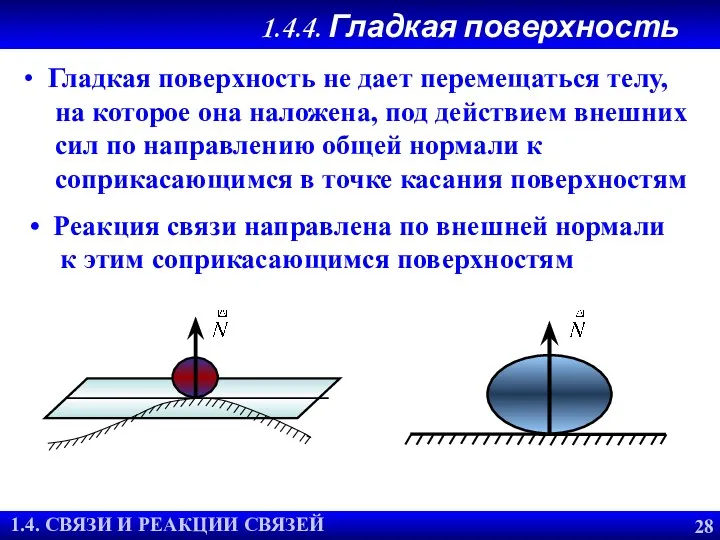
1.4.4. Гладкая поверхность
1.4. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ
Гладкая поверхность не
1.4.4. Гладкая поверхность
1.4. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ
Гладкая поверхность не
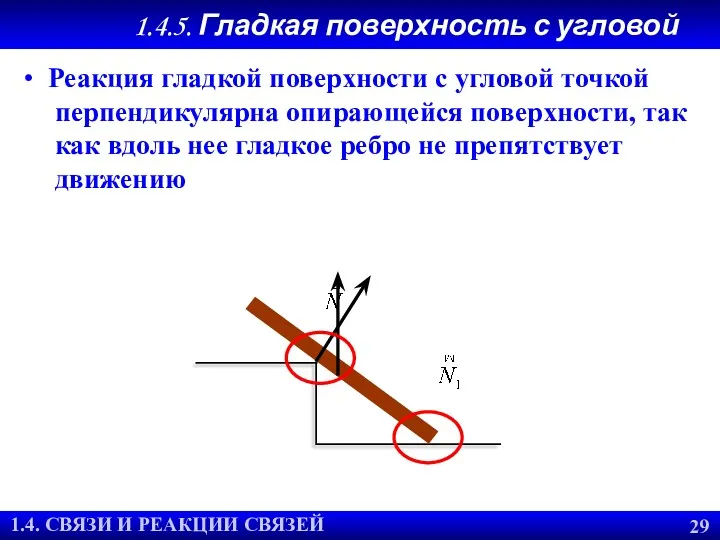
1.4.5. Гладкая поверхность с угловой точкой
1.4. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ
1.4.5. Гладкая поверхность с угловой точкой
1.4. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ

1.4.6. Подвижная цилиндрическая опора (катки)
1.4. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ
1.4.6. Подвижная цилиндрическая опора (катки)
1.4. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ

1.4.7. Неподвижный цилиндрический шарнир
1.4. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ
Цилиндрический шарнир
1.4.7. Неподвижный цилиндрический шарнир
1.4. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ
Цилиндрический шарнир
х
у
z
1.4.8. Неподвижный сферический шарнир
1.4. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ
х
у
z
1.4.8. Неподвижный сферический шарнир
1.4. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ
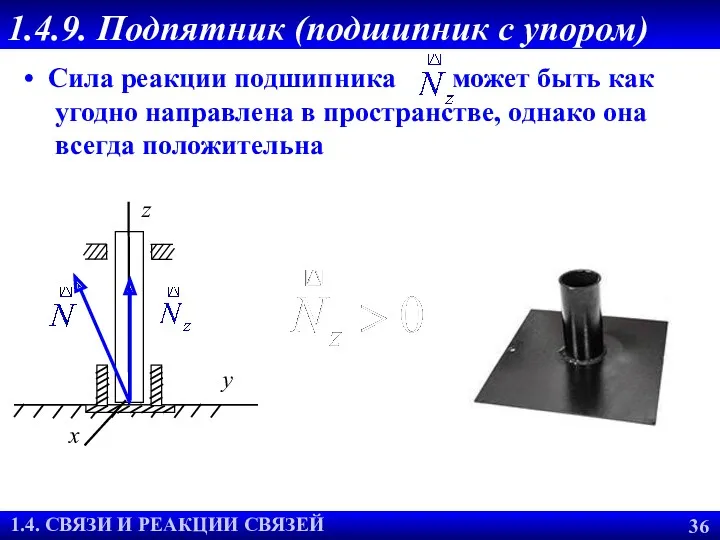
1.4.9. Подпятник (подшипник с упором)
1.4. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ
Сила
1.4.9. Подпятник (подшипник с упором)
1.4. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ
Сила

1.4.9. Идеальный стержень
В
Стержень не позволяет закрепленному с его
помощью телу
1.4.9. Идеальный стержень
В
Стержень не позволяет закрепленному с его помощью телу
1.3. АКСИОМЫ СТАТИКИ
Статика – наука аксиоматичная
На основе
1.3. АКСИОМЫ СТАТИКИ
Статика – наука аксиоматичная
На основе
1.3. АКСИОМЫ СТАТИКИ
Рудяк В.Я., Юдин В.А. Лекции по
теоретической механике.
1.3. АКСИОМЫ СТАТИКИ
Рудяк В.Я., Юдин В.А. Лекции по теоретической механике.
1.5.3. Тема следующей лекции
1.3. АКСИОМЫ СТАТИКИ
СИСТЕМА
СХОДЯЩИХСЯ СИЛ
1.5.3. Тема следующей лекции
1.3. АКСИОМЫ СТАТИКИ
СИСТЕМА
СХОДЯЩИХСЯ СИЛ
 Реактивное движение
Реактивное движение Тест Формулы за 7 класс
Тест Формулы за 7 класс Презентация Метод проектов на уроках физики
Презентация Метод проектов на уроках физики Автосцепное устройство
Автосцепное устройство разработка к уроку на тему Электролизация тел 8 класс
разработка к уроку на тему Электролизация тел 8 класс Применение правила равновесия рычага к блоку
Применение правила равновесия рычага к блоку Кинематика вращательного движения. Плоское движение. Лекция 2
Кинематика вращательного движения. Плоское движение. Лекция 2 Виды излучений. Инфракрасное излучение
Виды излучений. Инфракрасное излучение Интерференция, дифракция, поляризация
Интерференция, дифракция, поляризация Приборы для измерения атмосферного давления. Билет 23. Барометры
Приборы для измерения атмосферного давления. Билет 23. Барометры Решение задач по теме Строение атома, радиоактивные превращения
Решение задач по теме Строение атома, радиоактивные превращения Первичные измерительные преобразователи
Первичные измерительные преобразователи Айналмалы тоқ және трансформатор
Айналмалы тоқ және трансформатор Резание металла слесарной ножовкой
Резание металла слесарной ножовкой Трансмісія Об.447А. Системи гідроуправління та змащення трансмісії. (Тема 3.5)
Трансмісія Об.447А. Системи гідроуправління та змащення трансмісії. (Тема 3.5) Лекция 38. Дисперсия, поляризация света
Лекция 38. Дисперсия, поляризация света Теория механизмов и машин. Кинематический анализ механизмов
Теория механизмов и машин. Кинематический анализ механизмов Управление ядерным реактором
Управление ядерным реактором Свободные электромагнитные колебания
Свободные электромагнитные колебания Пара сил и момент силы относительно точки
Пара сил и момент силы относительно точки Неразветвленные цепи однофазного тока. Лекция №3
Неразветвленные цепи однофазного тока. Лекция №3 Исследование характеристик ККЛ
Исследование характеристик ККЛ Что изучает физика. Физические термины
Что изучает физика. Физические термины Қатты дененің қозғалысы
Қатты дененің қозғалысы дополнение к уроку физики Испарение- вопросы почемучки
дополнение к уроку физики Испарение- вопросы почемучки Силы в механике: сила упругости, сила сухого и вязкого трения.
Силы в механике: сила упругости, сила сухого и вязкого трения. Радиоактивность
Радиоактивность Теплові насоси та кондиціонери
Теплові насоси та кондиціонери