- Теория механизмов и машин. Кинематический анализ механизмов

Содержание
- 2. Основные задачи кинематического анализа механизмов Определение положений звеньев, включая и определение траекторий отдельных точек звеньев Определение
- 3. Кинематический анализ состоит в определении движения звеньев механизма по заданному движению начальных звеньев. Начальное звено –
- 4. Методы кинематического анализа Графический Графо-аналитический Аналитический
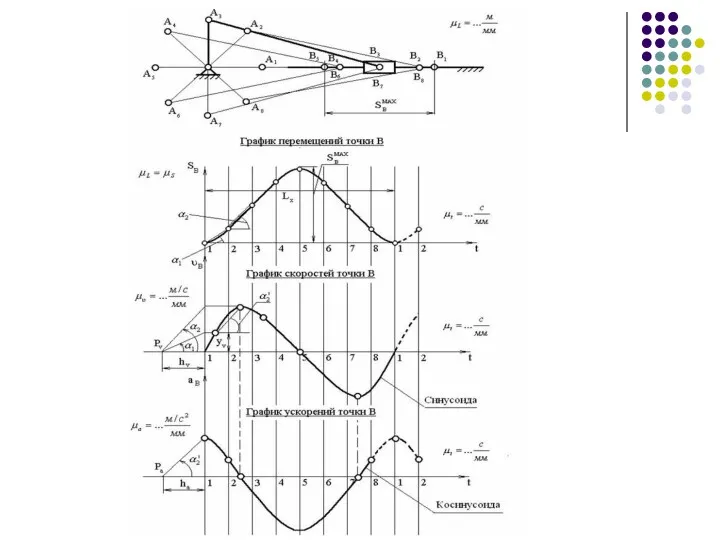
- 5. Графические методы Графические методы основаны на непосредственном построении траекторий движения наиболее характерных точек механизма, графическом дифференцировании
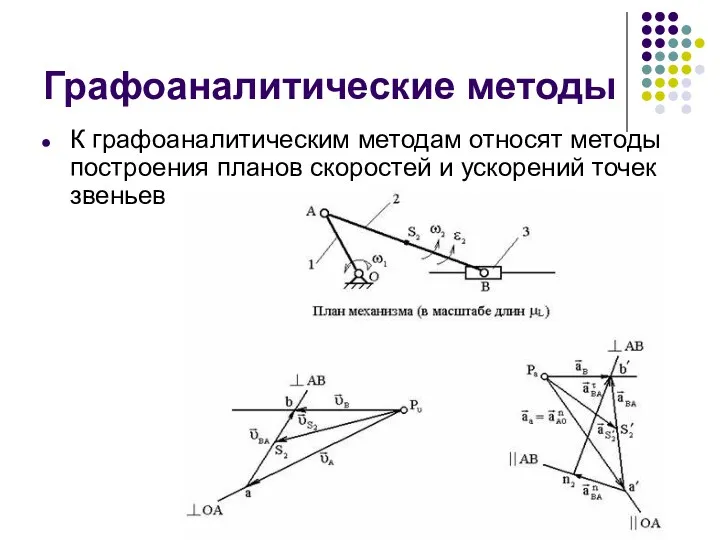
- 7. Графоаналитические методы К графоаналитическим методам относят методы построения планов скоростей и ускорений точек звеньев.
- 8. Свойства планов скоростей и ускорений Планом скоростей (ускорений) механизма называется чертеж, на котором изображены в виде
- 9. Аналитические методы Метод преобразования координат (метод Ю.Ф.Морошкина) Метод замкнутого векторного контура (метод В.А.Зиновьева)
- 10. Понятия и определения Функция положения - это аналитическая зависимость положения или координаты К-го звена (φk, ХК
- 11. Аналог ускорения. Угловая скорость К-го звена определяется зависимостью, получаемой дифференцированием уравнения (3) по dt: При дифференцировании
- 12. Величину называют ещё передаточным отношением, так как выражение можно преобразовать, умножив и разделив его на величину
- 14. Метод замкнутых векторных контуров Рассмотрим замкнутый векторный контур. Составим векторное уравнение: Спроектируем векторное уравнение на оси
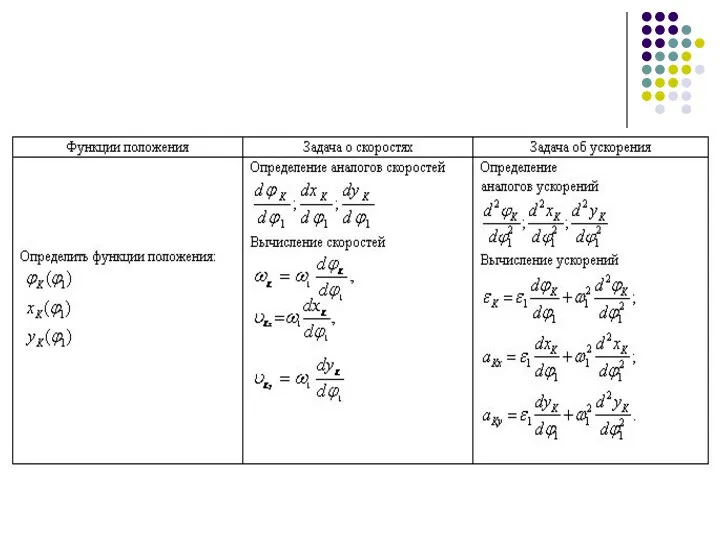
- 15. Решение задачи о положениях Определим функции положения ползуна C и шатуна 2 . Решение задачи о
- 16. Алгоритмический метод векторного анализа Кинематический анализ механизма ведется в следующем порядке: сначала исследуется движение начальных звеньев,
- 17. Алгоритм анализа механизма 1-го класса Дано: Найти:
- 18. Алгоритм для механизма 1 класса φ=ωt dφ/dt=ω
- 19. Алгоритм анализа механизма для группы Ассура 2-го класса Будем считать М=-1, если при обходе тре угольника
- 20. Алгоритм анализа механизма для группы Ассура 2-го класса Для решения задачи о положениях звеньев данной группы
- 21. Алгоритм анализа механизма для группы Ассура 2-го класса Расчет геометрических параметров Проверка условия Если условие не
- 23. Скачать презентацию
Основные задачи кинематического анализа механизмов
Определение положений звеньев, включая и определение траекторий
Основные задачи кинематического анализа механизмов
Определение положений звеньев, включая и определение траекторий
Кинематический анализ состоит в определении движения звеньев механизма по заданному движению
Кинематический анализ состоит в определении движения звеньев механизма по заданному движению
Методы кинематического анализа
Графический
Графо-аналитический
Аналитический
Методы кинематического анализа
Графический
Графо-аналитический
Аналитический
Графические методы
Графические методы основаны на непосредственном построении траекторий движения наиболее характерных
Графические методы
Графические методы основаны на непосредственном построении траекторий движения наиболее характерных
Графоаналитические методы
К графоаналитическим методам относят методы построения планов скоростей и ускорений
Графоаналитические методы
К графоаналитическим методам относят методы построения планов скоростей и ускорений
Свойства планов скоростей и ускорений
Планом скоростей (ускорений) механизма называется чертеж, на
Свойства планов скоростей и ускорений
Планом скоростей (ускорений) механизма называется чертеж, на
Аналитические методы
Метод преобразования координат (метод Ю.Ф.Морошкина)
Метод замкнутого векторного контура (метод В.А.Зиновьева)
Аналитические методы
Метод преобразования координат (метод Ю.Ф.Морошкина)
Метод замкнутого векторного контура (метод В.А.Зиновьева)
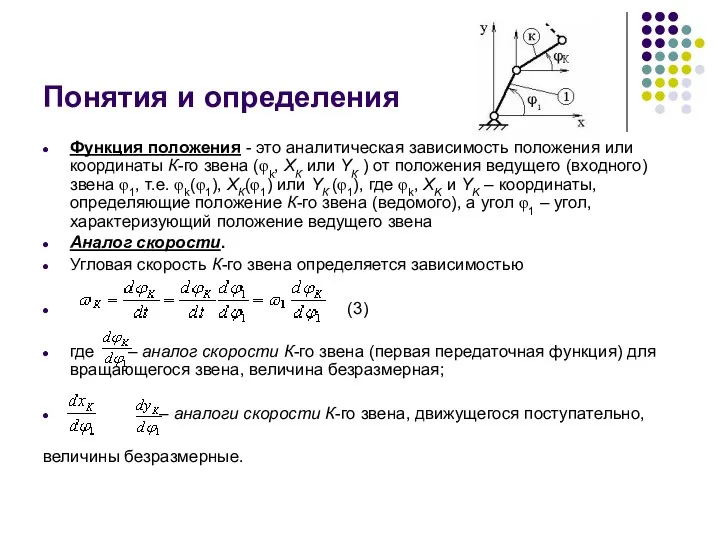
Понятия и определения
Функция положения - это аналитическая зависимость положения или координаты
Понятия и определения
Функция положения - это аналитическая зависимость положения или координаты
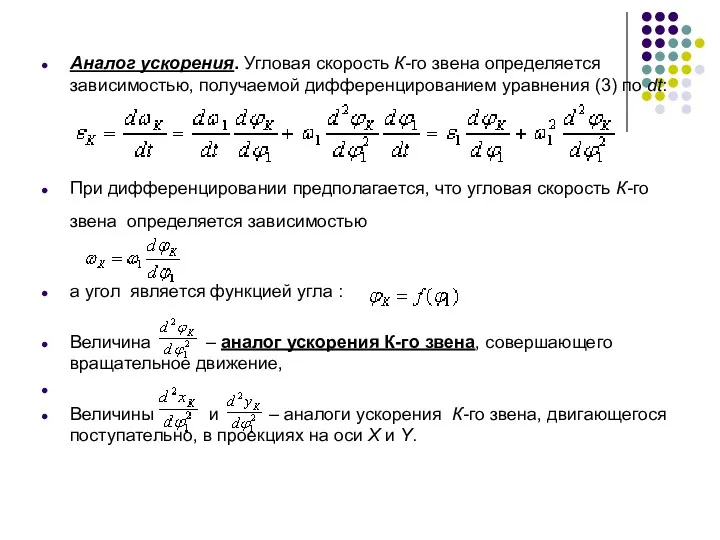
Аналог ускорения. Угловая скорость К-го звена определяется зависимостью, получаемой дифференцированием уравнения
Аналог ускорения. Угловая скорость К-го звена определяется зависимостью, получаемой дифференцированием уравнения
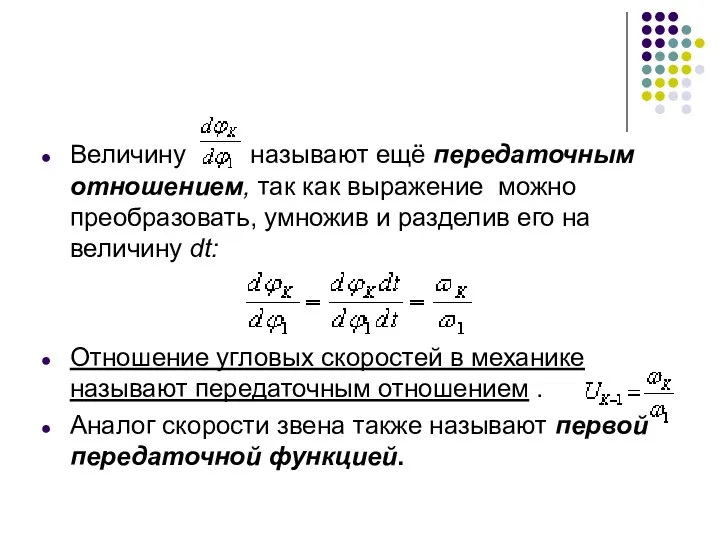
Величину называют ещё передаточным отношением, так как выражение можно преобразовать, умножив
Величину называют ещё передаточным отношением, так как выражение можно преобразовать, умножив
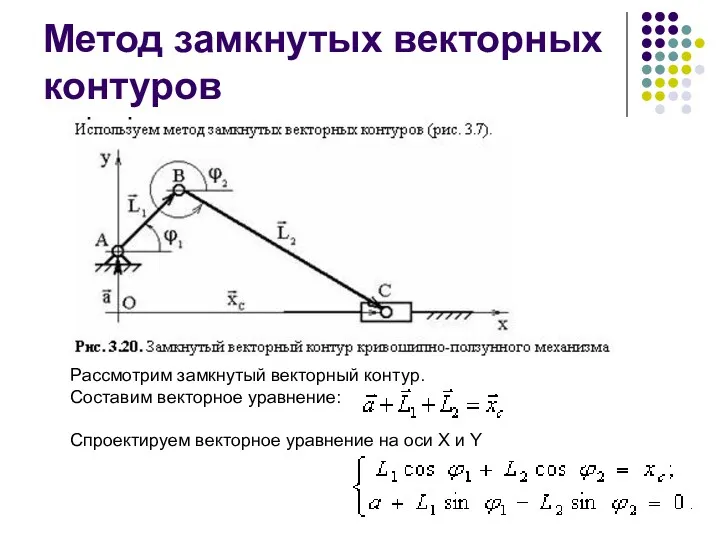
Метод замкнутых векторных контуров
Рассмотрим замкнутый векторный контур.
Составим векторное уравнение:
Спроектируем векторное уравнение
Метод замкнутых векторных контуров
Рассмотрим замкнутый векторный контур.
Составим векторное уравнение:
Спроектируем векторное уравнение
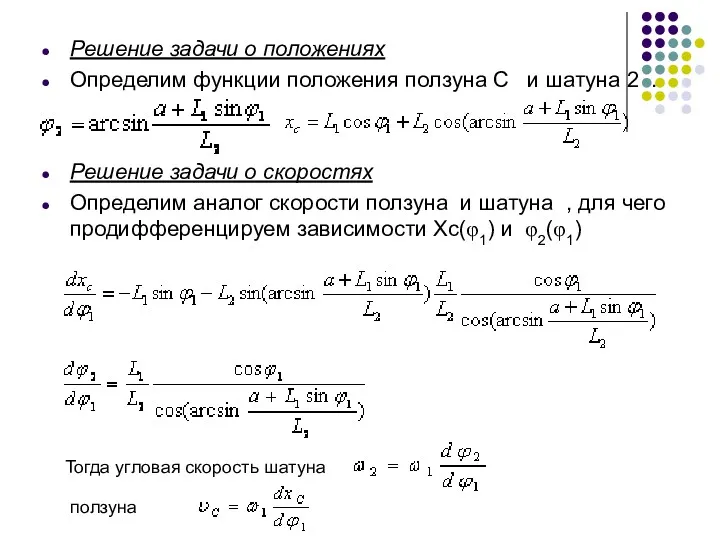
Решение задачи о положениях
Определим функции положения ползуна C и шатуна 2
Решение задачи о положениях
Определим функции положения ползуна C и шатуна 2
Алгоритмический метод векторного анализа
Кинематический анализ механизма ведется в следующем порядке: сначала
Алгоритмический метод векторного анализа
Кинематический анализ механизма ведется в следующем порядке: сначала
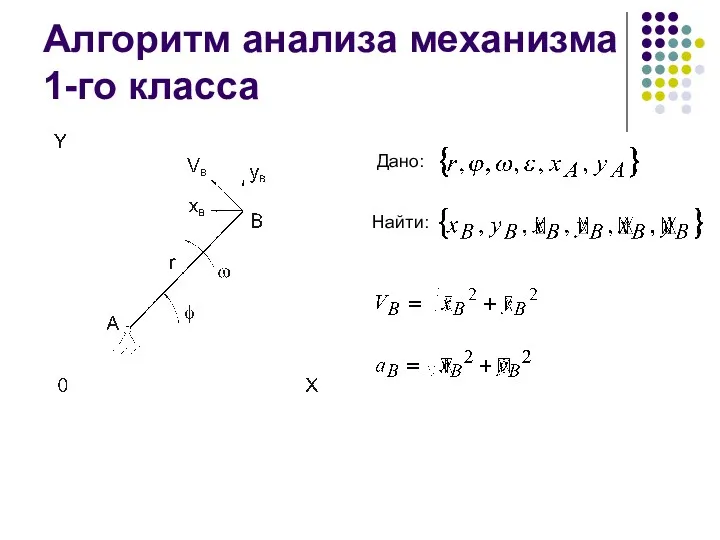
Алгоритм анализа механизма 1-го класса
Дано:
Найти:
Алгоритм анализа механизма 1-го класса
Дано:
Найти:
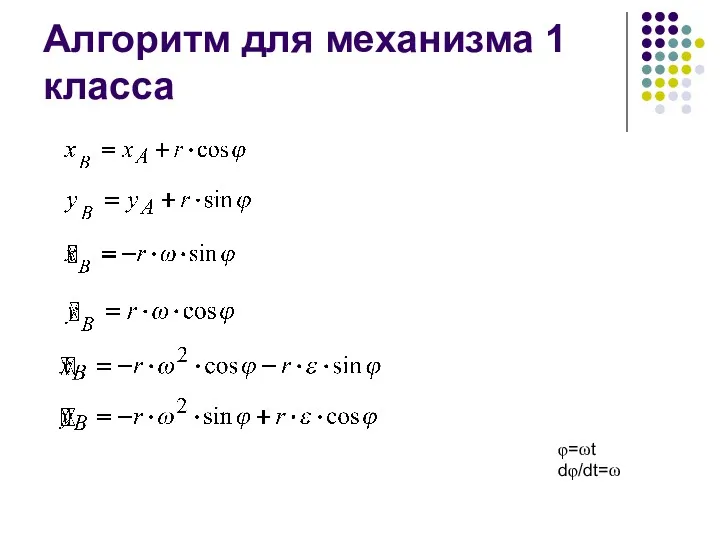
Алгоритм для механизма 1 класса
φ=ωt
dφ/dt=ω
Алгоритм для механизма 1 класса
φ=ωt
dφ/dt=ω
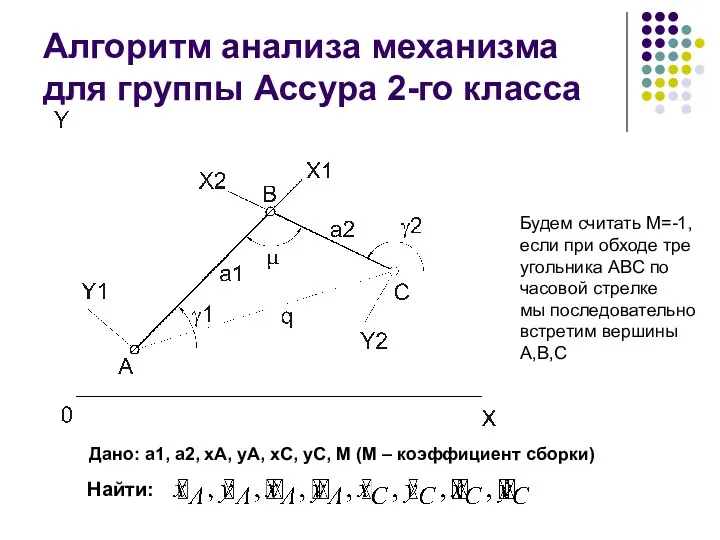
Алгоритм анализа механизма для группы Ассура 2-го класса
Будем считать М=-1,
если при
Алгоритм анализа механизма для группы Ассура 2-го класса
Будем считать М=-1,
если при
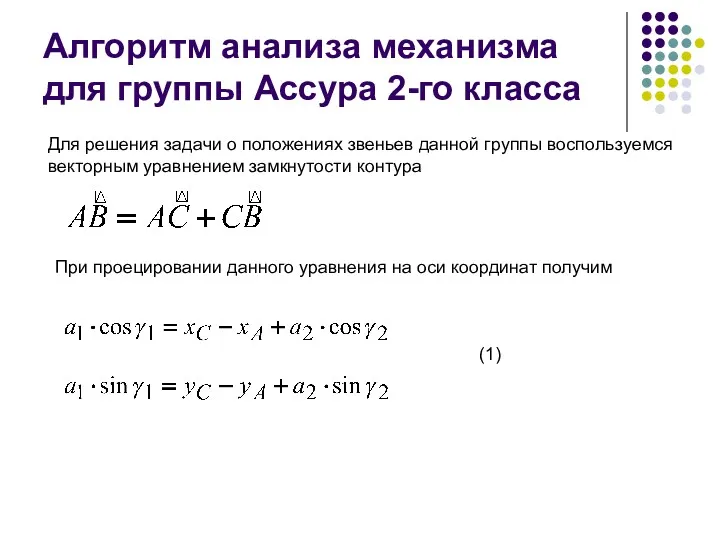
Алгоритм анализа механизма для группы Ассура 2-го класса
Для решения задачи о
Алгоритм анализа механизма для группы Ассура 2-го класса
Для решения задачи о
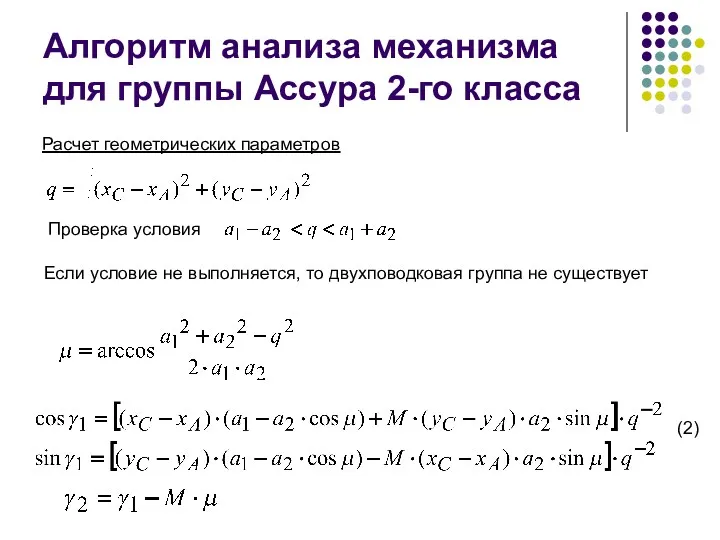
Алгоритм анализа механизма для группы Ассура 2-го класса
Расчет геометрических параметров
Проверка условия
Если
Алгоритм анализа механизма для группы Ассура 2-го класса
Расчет геометрических параметров
Проверка условия
Если
 Передачі між валами, що мають паралельні осі, та осі, які перетинаються та схрещуються. Ремінна, фрикційна, зубчаста передачі
Передачі між валами, що мають паралельні осі, та осі, які перетинаються та схрещуються. Ремінна, фрикційна, зубчаста передачі Механические волны. 9 класс
Механические волны. 9 класс Обработка результатов измерений цепей связи на постоянном токе. (Практическая работа 6)
Обработка результатов измерений цепей связи на постоянном токе. (Практическая работа 6) Комбинированная энергетическая установка
Комбинированная энергетическая установка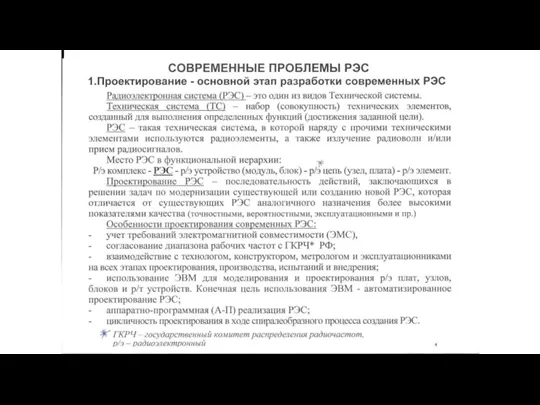 Современные проблемы РЭС
Современные проблемы РЭС Лампочка. Принцип работы лампы накаливания
Лампочка. Принцип работы лампы накаливания Передаточные функции и структурные схемы бокового движения самолета (лекция 9)
Передаточные функции и структурные схемы бокового движения самолета (лекция 9) Профессия автомеханик
Профессия автомеханик Энергетические возможности ядерных реакторов различных типов
Энергетические возможности ядерных реакторов различных типов Метод дипольного электрического зондирования
Метод дипольного электрического зондирования Волновые свойства света: интерференция, дифракция
Волновые свойства света: интерференция, дифракция Реактивное движение
Реактивное движение Виды теплопередачи
Виды теплопередачи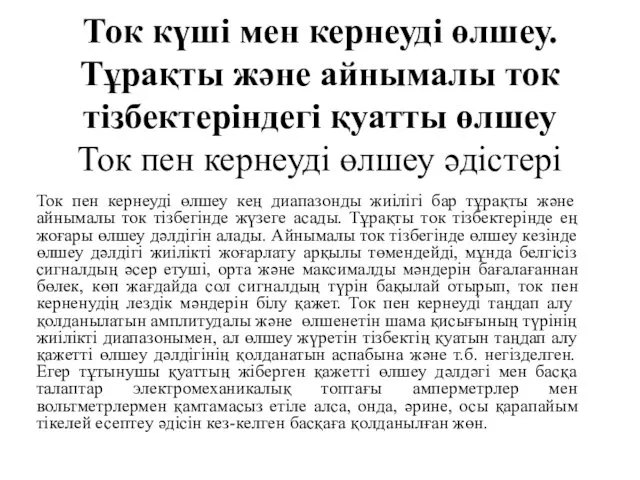 Ток күші мен кернеуді өлшеу. Тұрақты және айнымалы ток тізбектеріндегі қуатты өлшеу. Ток пен кернеуді өлшеу әдістері
Ток күші мен кернеуді өлшеу. Тұрақты және айнымалы ток тізбектеріндегі қуатты өлшеу. Ток пен кернеуді өлшеу әдістері Распределение молекул в поле сил тяжести. Барометрическая формула
Распределение молекул в поле сил тяжести. Барометрическая формула Подшипники скольжения
Подшипники скольжения Сравнительная характеристика полупроводниковых материалов
Сравнительная характеристика полупроводниковых материалов Аэрогазодинамика. Плоские изоэнтропические течения газа (лекции 8, 9)
Аэрогазодинамика. Плоские изоэнтропические течения газа (лекции 8, 9)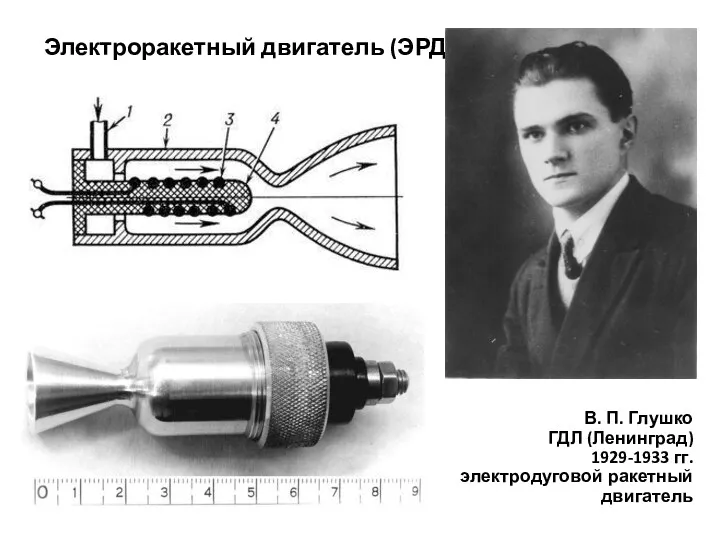 Ракетные двигатели
Ракетные двигатели Тест для 8 класса Электрический ток
Тест для 8 класса Электрический ток Гелиоцентрическая система мира
Гелиоцентрическая система мира Некоторые средства развития познавательного интереса на уроках физики 7-8 классов.
Некоторые средства развития познавательного интереса на уроках физики 7-8 классов. Формирование ключевых компетенций при решении творческих задач на уроках физики
Формирование ключевых компетенций при решении творческих задач на уроках физики Оќыту процессінде композициялыќ жобалау єдісін ќолдану
Оќыту процессінде композициялыќ жобалау єдісін ќолдану Детали машин
Детали машин The adequacy of analysis of linear periodically-time-variable circuits by the frequency symbolic method in the time domain
The adequacy of analysis of linear periodically-time-variable circuits by the frequency symbolic method in the time domain Упругие и квазиупругие силы. Закон Гука. Гармонические колебания: частота, период, амплитуда и фаза колебаний
Упругие и квазиупругие силы. Закон Гука. Гармонические колебания: частота, период, амплитуда и фаза колебаний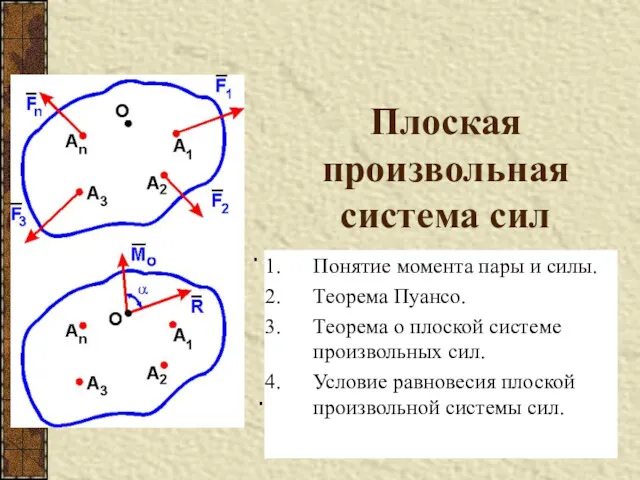 Плоская произвольная система сил
Плоская произвольная система сил