- Статика. Основные понятия и определения

Содержание
- 2. Уравновешивающей называется сила F, равная по модулю равнодействующей и направленная по линии ее действия в противоположную
- 3. Статика. Аксиомы статики. 1. Аксиома равновесия двух сил. Абсолютно твердое тело находится в равновесии под действием
- 4. Статика. Аксиомы статики. 3. Аксиома параллелограмма сил. Равнодействующая двух сил, пересекающихся в точке, приложена в той
- 5. Статика. Связи и их реакции. Связи и их реакции. 1. Гладкая поверхность. 2. Плоский шарнир. Шарнирно
- 6. Статика. Связи и их реакции. 3. Гибкая нить. 4. Невесомые стержни. 5. Сферический шарнир. 6. Жесткая
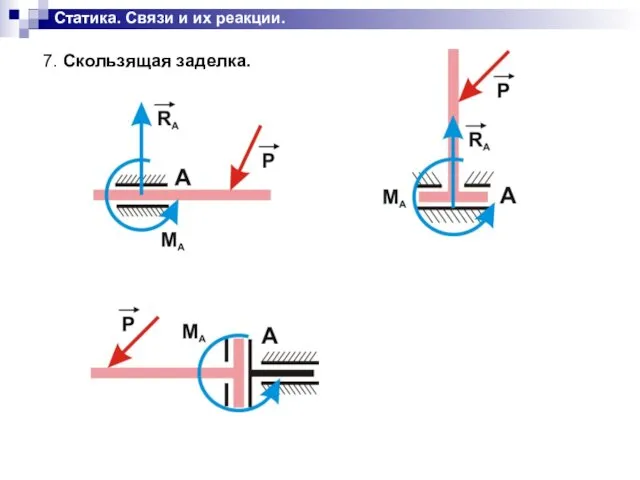
- 7. Статика. Связи и их реакции. 7. Скользящая заделка.
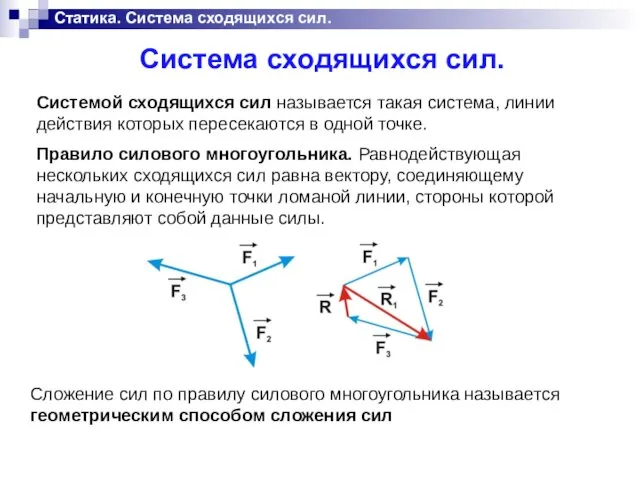
- 8. Статика. Система сходящихся сил. Системой сходящихся сил называется такая система, линии действия которых пересекаются в одной
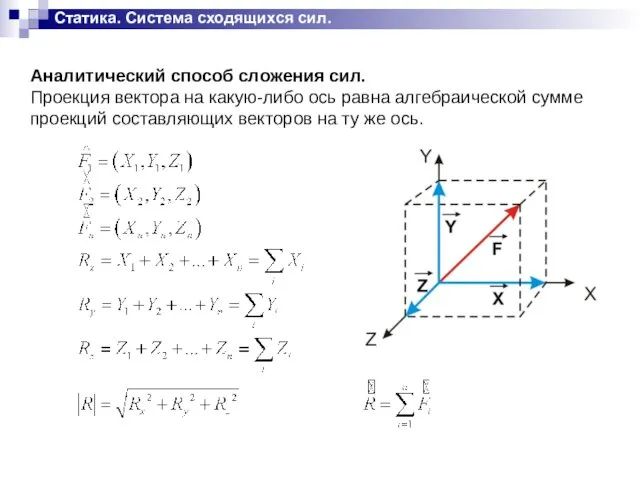
- 9. Статика. Система сходящихся сил. Аналитический способ сложения сил. Проекция вектора на какую-либо ось равна алгебраической сумме
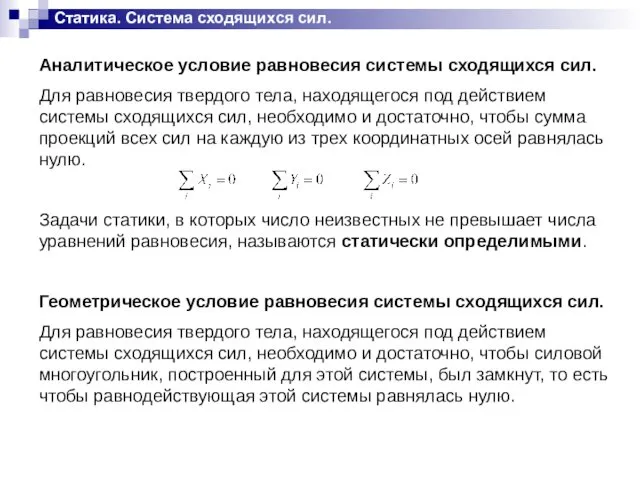
- 10. Статика. Система сходящихся сил. Аналитическое условие равновесия системы сходящихся сил. Для равновесия твердого тела, находящегося под
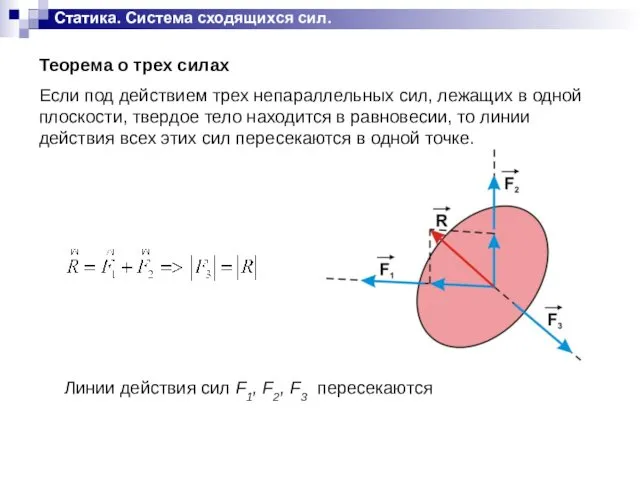
- 11. Статика. Система сходящихся сил. Теорема о трех силах Если под действием трех непараллельных сил, лежащих в
- 12. Статика. Система сходящихся сил. Последовательность решения задач статики: 1. Выделяют тело, равновесие которого должно быть рассмотрено.
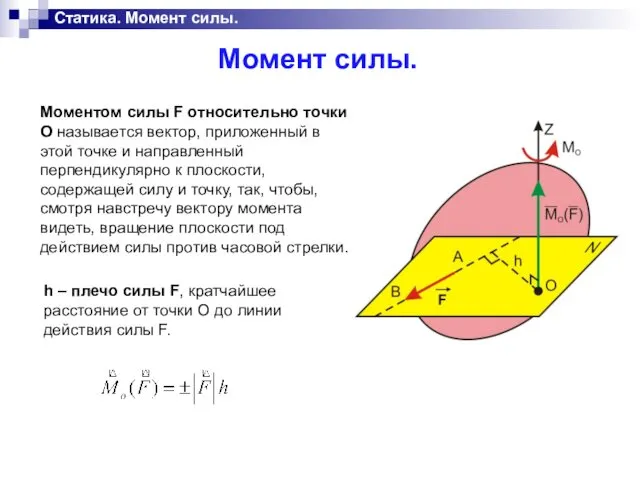
- 13. Статика. Момент силы. Моментом силы F относительно точки О называется вектор, приложенный в этой точке и
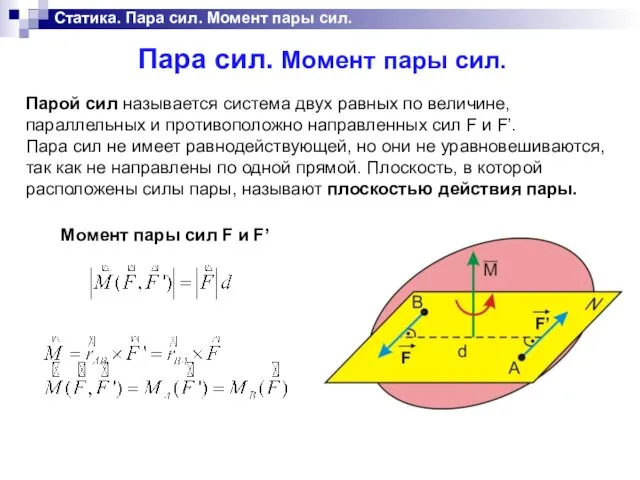
- 14. Статика. Пара сил. Момент пары сил. Парой сил называется система двух равных по величине, параллельных и
- 15. Статика. Пара сил. Момент пары сил. Свойства пар сил Теорема. Пары сил, лежащие в одной плоскости
- 16. Статика. Приведение системы сил. Теорема. Метод Пуансо. Силу, не изменяя ее действия на твердое тело, можно
- 17. Сложение пар сил. Условие равновесия пар. Теорема. Действие на тело нескольких пар сил, лежащих в произвольных
- 18. Статика. Приведение системы сил. Геометрическая сумма всех сил называется главным вектором системы сил. Геометрическая сумма моментов
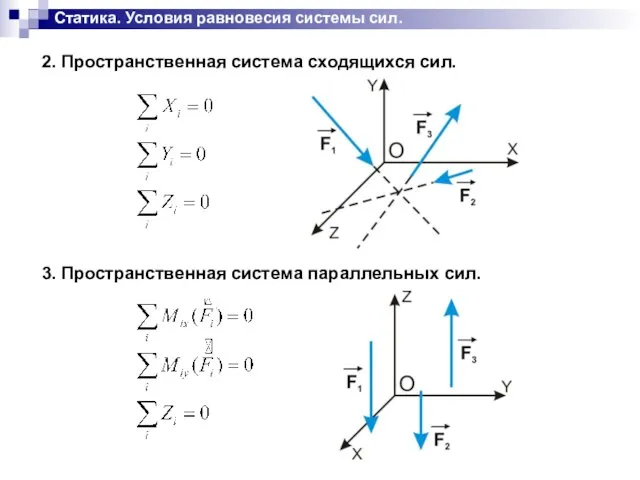
- 19. Статика. Условия равновесия системы сил. 2. Пространственная система сходящихся сил. 3. Пространственная система параллельных сил.
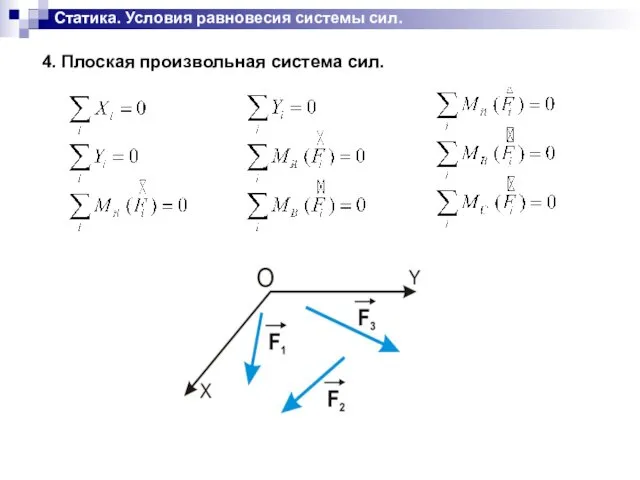
- 20. Статика. Условия равновесия системы сил. 4. Плоская произвольная система сил.
- 21. Статика. Условия равновесия системы сил. 5. Плоская система сходящихся сил. 6. Плоская система параллельных сил.
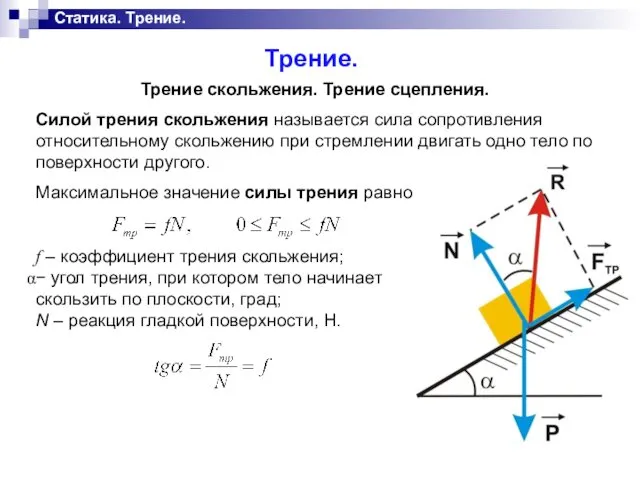
- 22. Статика. Трение. Трение. Трение скольжения. Трение сцепления. Силой трения скольжения называется сила сопротивления относительному скольжению при
- 23. Статика. Трение. Трение. Трение качения. Парой сил (моментом) сопротивления качению называют токай момент, который возникает при
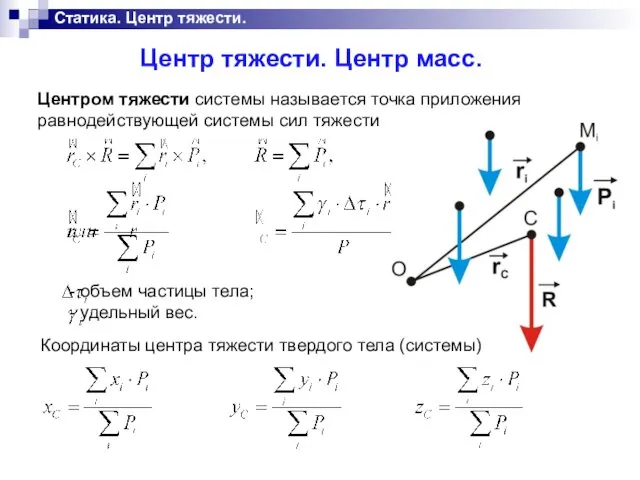
- 24. Статика. Центр тяжести. Центр тяжести. Центр масс. Центром тяжести системы называется точка приложения равнодействующей системы сил
- 25. Динамика. Динамика. Основные понятия и определения. Динамика материальной точки.
- 26. Динамика. Основные понятия и определения. Закон независимости действия сил. Несколько одновременно действующих на материальную точку сил
- 27. Динамика. Основные задачи динамики. Основные задачи динамики: Прямая задача – зная уравнение движение материальной точки или
- 28. Динамика. Основные задачи динамики. Последовательность решения задач динамики: 1. Выделяют тело, движение которого должно быть рассмотрено.
- 29. Динамика механической системы. Динамика механической системы. Динамика механической системы.
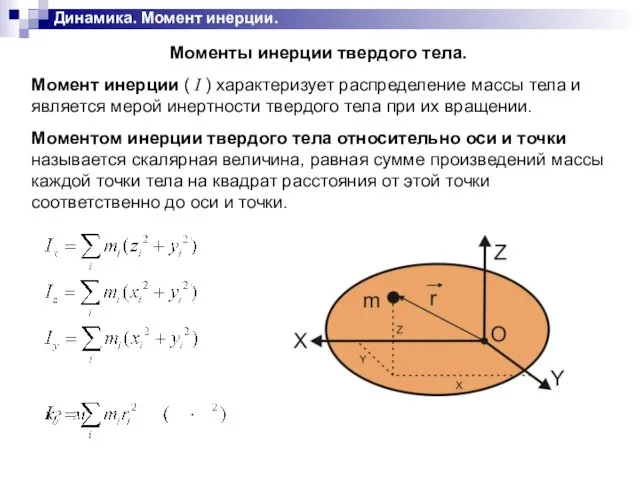
- 30. Динамика. Момент инерции. Моменты инерции твердого тела. Момент инерции ( I ) характеризует распределение массы тела
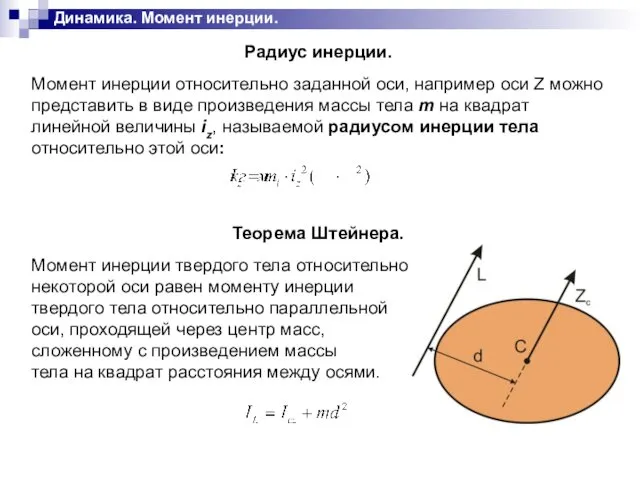
- 31. Динамика. Момент инерции.
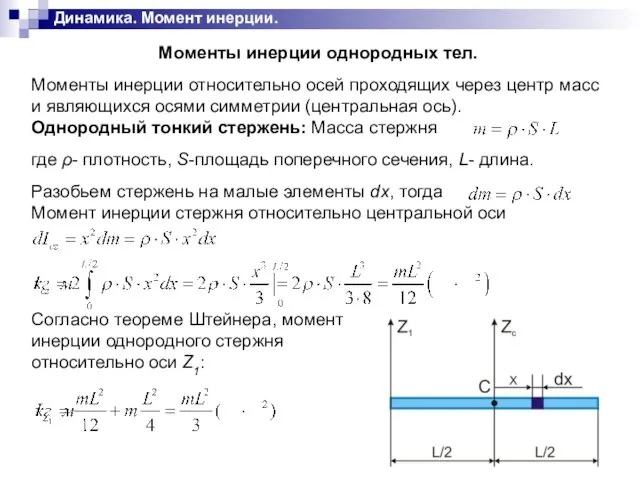
- 32. Динамика. Момент инерции.
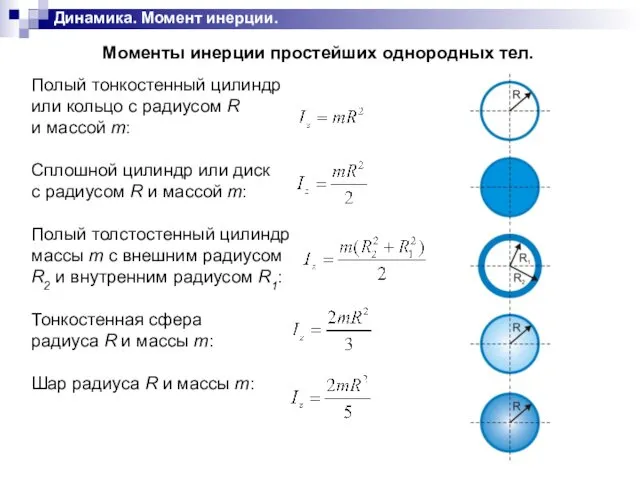
- 33. Динамика. Момент инерции.
- 34. Динамика. Работа силы.
- 35. Динамика. Работа силы.
- 36. Динамика. Работа силы.
- 37. Работа сил, приложенных к твердому телу. Скорость при произвольном движении тела: Элементарная работа равнодействующей сил: Элементарная
- 38. Динамика. Кинетическая энергия. Кинетическая энергия. Кинетическая энергия точки определяется как половина произведения массы на квадрат величины
- 39. Динамика. Кинетическая энергия. Кинетическая энергия твердого тела. Кинетическая энергия – мера механического движения, поэтому вид формул
- 40. Динамика. Кинетическая энергия. Если плоское движение представить в виде вращательного вокруг мгновенного центра скоростей, то согласно
- 41. Динамика. Кинетическая энергия. Теорема об изменении кинетической энергии материальной точки. Изменение кинетической энергии материальной точки на
- 42. Динамика. Кинетическая энергия. Теорема об изменении кинетической энергии механической системы. Изменение кинетической энергии механической энергии на
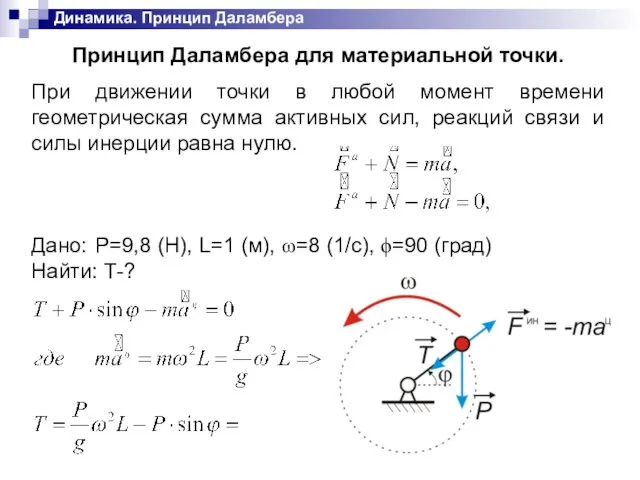
- 43. Динамика. Принцип Даламбера Принцип Даламбера для материальной точки. При движении точки в любой момент времени геометрическая
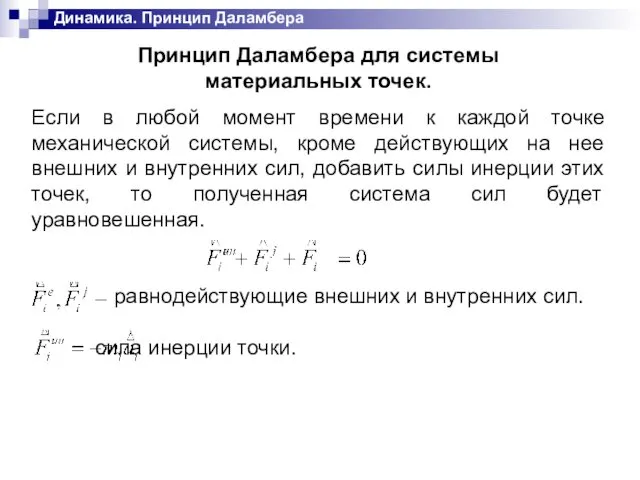
- 44. Динамика. Принцип Даламбера Принцип Даламбера для системы материальных точек. Если в любой момент времени к каждой
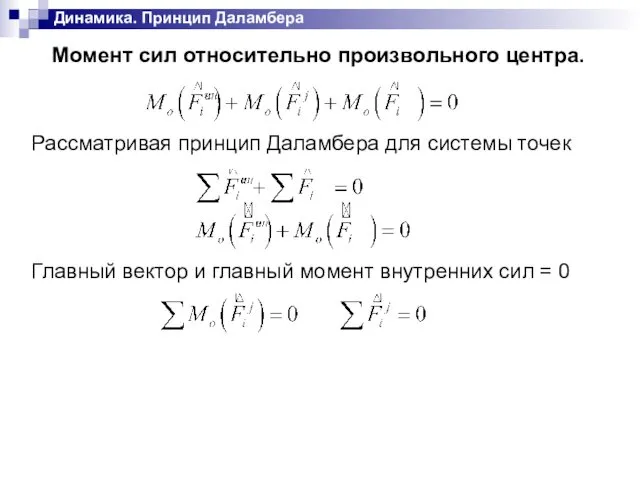
- 45. Динамика. Принцип Даламбера Момент сил относительно произвольного центра. Рассматривая принцип Даламбера для системы точек Главный вектор
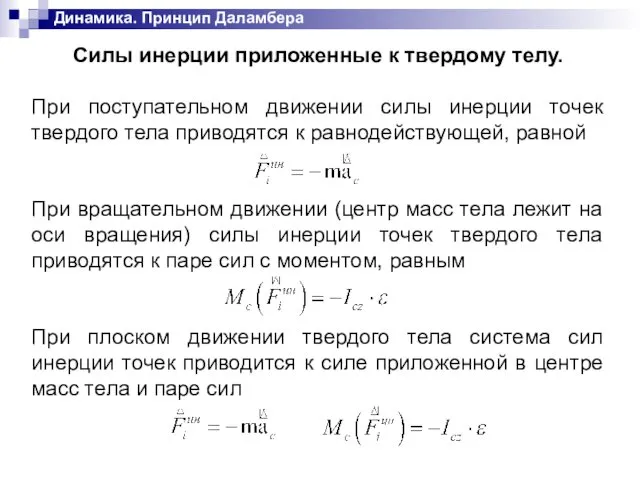
- 46. Динамика. Принцип Даламбера Силы инерции приложенные к твердому телу. При поступательном движении силы инерции точек твердого
- 47. Динамика. Связи и их классификация Связи. Связями в динамике считают любого вида ограничения, которые налагаются на
- 48. Динамика. Связи и их классификация Классификация связей. 1. Связи, не изменяющиеся с течением времени называются стационарными,
- 49. Динамика. Принцип возможных перемещений. Возможные (виртуальные перемещения). Возможным перемещением механической системы называют любую совокупность элементарных перемещений
- 50. Динамика. Принцип возможных перемещений. Возможная работа. Элементарная работа, которая на материальную точку сила могла бы совершать
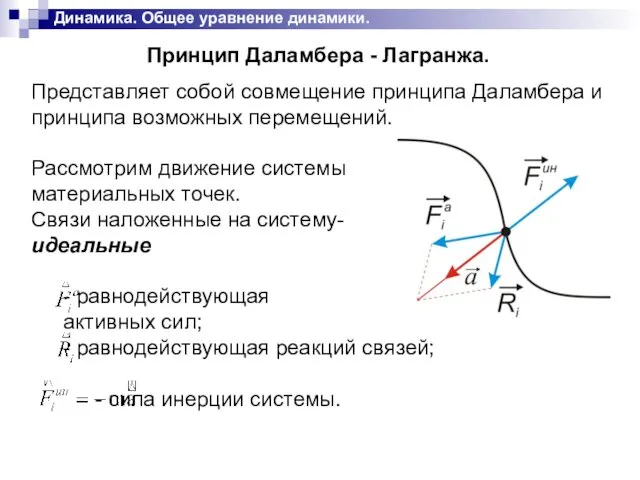
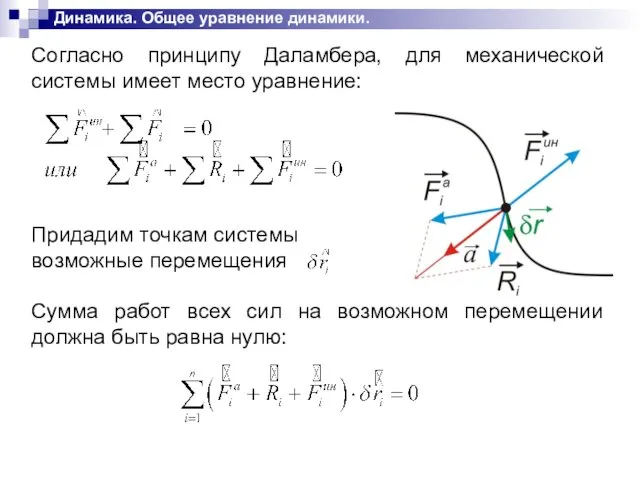
- 51. Динамика. Общее уравнение динамики. Принцип Даламбера - Лагранжа. Представляет собой совмещение принципа Даламбера и принципа возможных
- 52. Динамика. Общее уравнение динамики. Согласно принципу Даламбера, для механической системы имеет место уравнение: Придадим точкам системы
- 53. Динамика. Общее уравнение динамики. Для идеальных связей: Следовательно: - элементарная работа равнодействующей активных сил, приложенных к
- 55. Скачать презентацию
Уравновешивающей называется сила F, равная по модулю равнодействующей и направленная по
Уравновешивающей называется сила F, равная по модулю равнодействующей и направленная по
Статика. Аксиомы статики.
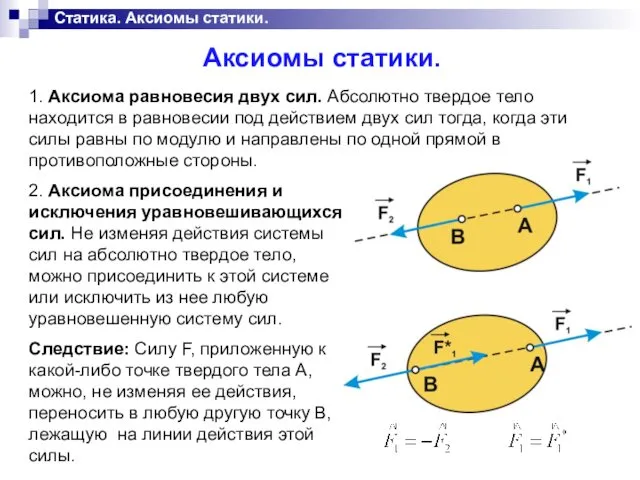
1. Аксиома равновесия двух сил. Абсолютно твердое тело находится
Статика. Аксиомы статики.
1. Аксиома равновесия двух сил. Абсолютно твердое тело находится
Статика. Аксиомы статики.
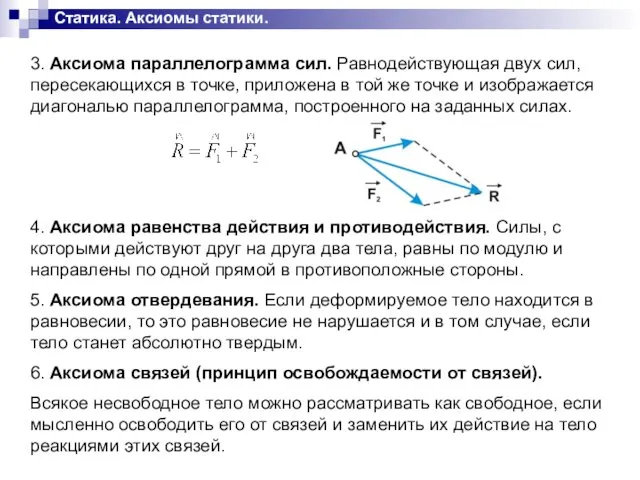
3. Аксиома параллелограмма сил. Равнодействующая двух сил, пересекающихся в
Статика. Аксиомы статики.
3. Аксиома параллелограмма сил. Равнодействующая двух сил, пересекающихся в
Статика. Связи и их реакции.
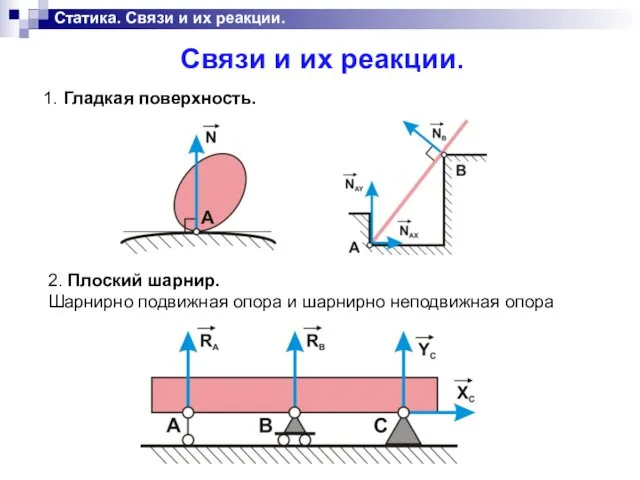
Связи и их реакции.
1. Гладкая поверхность.
2.
Статика. Связи и их реакции.
Связи и их реакции.
1. Гладкая поверхность.
2.

Статика. Связи и их реакции.
3. Гибкая нить.
4. Невесомые стержни.
5. Сферический
Статика. Связи и их реакции.
3. Гибкая нить.
4. Невесомые стержни.
5. Сферический
Статика. Связи и их реакции.
7. Скользящая заделка.
Статика. Связи и их реакции.
7. Скользящая заделка.
Статика. Система сходящихся сил.
Системой сходящихся сил называется такая система, линии действия
Статика. Система сходящихся сил.
Системой сходящихся сил называется такая система, линии действия
Статика. Система сходящихся сил.
Аналитический способ сложения сил.
Проекция вектора на какую-либо ось
Статика. Система сходящихся сил.
Аналитический способ сложения сил.
Проекция вектора на какую-либо ось
Статика. Система сходящихся сил.
Аналитическое условие равновесия системы сходящихся сил.
Для равновесия твердого
Статика. Система сходящихся сил.
Аналитическое условие равновесия системы сходящихся сил.
Для равновесия твердого
Статика. Система сходящихся сил.
Теорема о трех силах
Если под действием трех непараллельных
Статика. Система сходящихся сил.
Теорема о трех силах
Если под действием трех непараллельных
Статика. Система сходящихся сил.
Последовательность решения задач статики:
1. Выделяют тело, равновесие которого
Статика. Система сходящихся сил.
Последовательность решения задач статики:
1. Выделяют тело, равновесие которого
Статика. Момент силы.
Моментом силы F относительно точки О называется вектор,
Статика. Момент силы.
Моментом силы F относительно точки О называется вектор,
Статика. Пара сил. Момент пары сил.
Парой сил называется система двух равных
Статика. Пара сил. Момент пары сил.
Парой сил называется система двух равных
Статика. Пара сил. Момент пары сил.
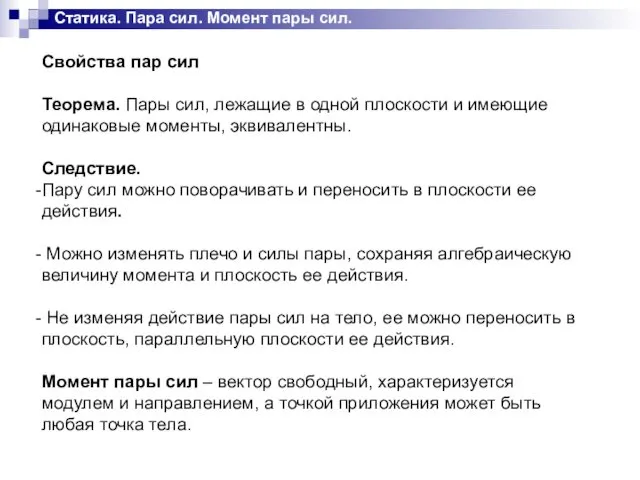
Свойства пар сил
Теорема. Пары сил, лежащие
Статика. Пара сил. Момент пары сил.
Свойства пар сил
Теорема. Пары сил, лежащие
Статика. Приведение системы сил.
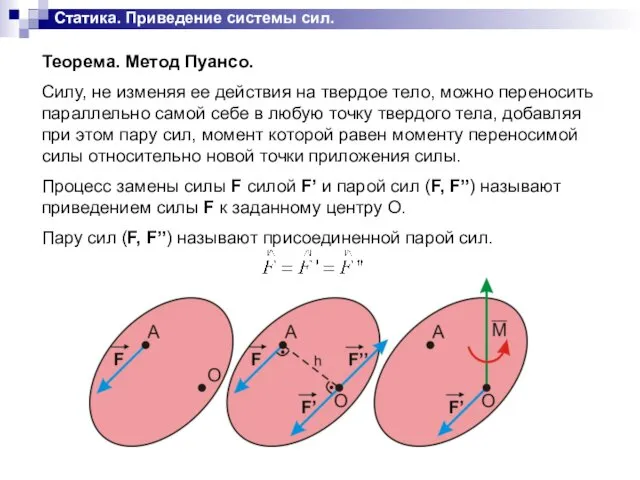
Теорема. Метод Пуансо.
Силу, не изменяя ее действия
Статика. Приведение системы сил.
Теорема. Метод Пуансо.
Силу, не изменяя ее действия
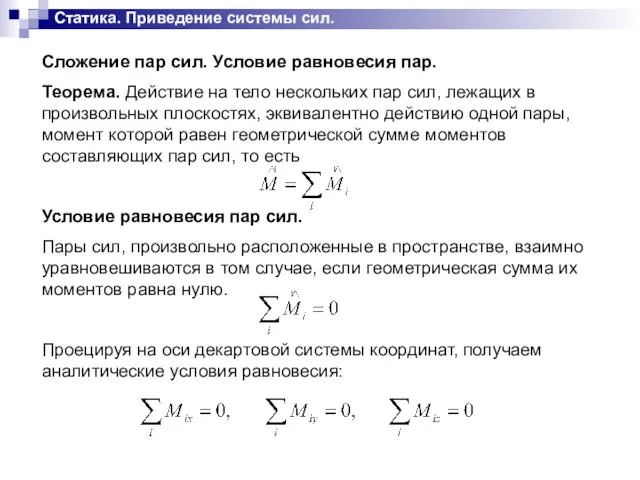
Сложение пар сил. Условие равновесия пар.
Теорема. Действие на тело нескольких пар
Сложение пар сил. Условие равновесия пар.
Теорема. Действие на тело нескольких пар
Статика. Приведение системы сил.
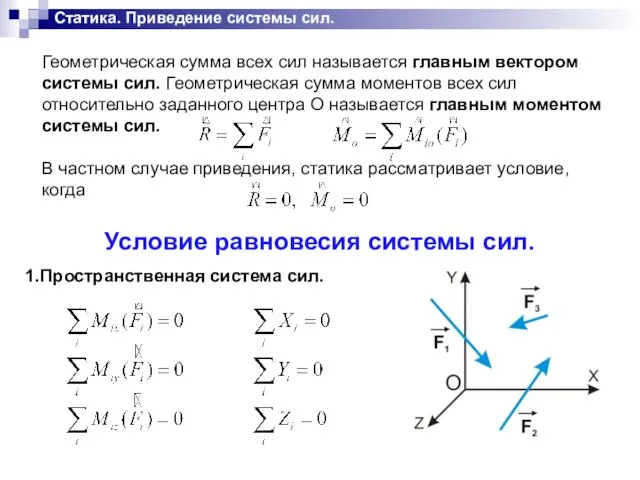
Геометрическая сумма всех сил называется главным вектором системы
Статика. Приведение системы сил.
Геометрическая сумма всех сил называется главным вектором системы
Статика. Условия равновесия системы сил.
2. Пространственная система сходящихся сил.
3. Пространственная система
Статика. Условия равновесия системы сил.
2. Пространственная система сходящихся сил.
3. Пространственная система
Статика. Условия равновесия системы сил.
4. Плоская произвольная система сил.
Статика. Условия равновесия системы сил.
4. Плоская произвольная система сил.

Статика. Условия равновесия системы сил.
5. Плоская система сходящихся сил.
6. Плоская система
Статика. Условия равновесия системы сил.
5. Плоская система сходящихся сил.
6. Плоская система
Статика. Трение.
Трение.
Трение скольжения. Трение сцепления.
Силой трения скольжения называется сила сопротивления относительному
Статика. Трение.
Трение.
Трение скольжения. Трение сцепления.
Силой трения скольжения называется сила сопротивления относительному

Статика. Трение.
Трение.
Трение качения.
Парой сил (моментом) сопротивления качению называют токай момент, который
Статика. Трение.
Трение.
Трение качения.
Парой сил (моментом) сопротивления качению называют токай момент, который
Статика. Центр тяжести.
Центр тяжести. Центр масс.
Центром тяжести системы называется точка приложения
Статика. Центр тяжести.
Центр тяжести. Центр масс.
Центром тяжести системы называется точка приложения

Динамика.
Динамика. Основные понятия и определения.
Динамика материальной точки.
Динамика.
Динамика. Основные понятия и определения.
Динамика материальной точки.
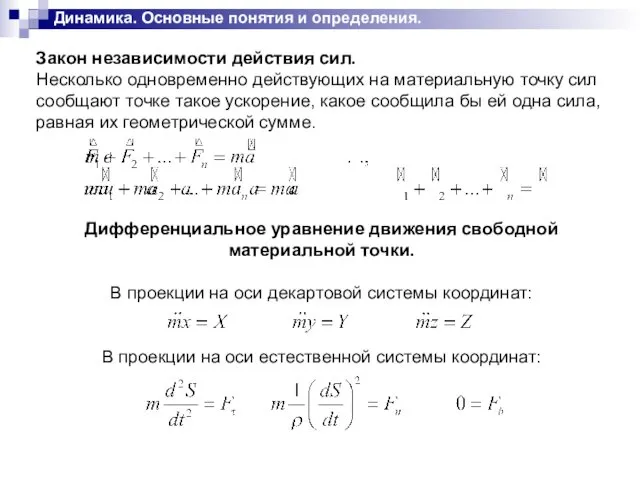
Динамика. Основные понятия и определения.
Закон независимости действия сил.
Несколько одновременно действующих
Динамика. Основные понятия и определения.
Закон независимости действия сил.
Несколько одновременно действующих
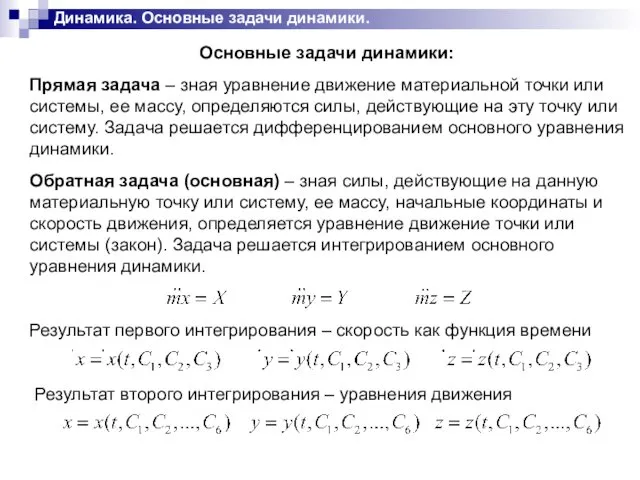
Динамика. Основные задачи динамики.
Основные задачи динамики:
Прямая задача – зная уравнение движение
Динамика. Основные задачи динамики.
Основные задачи динамики:
Прямая задача – зная уравнение движение
Динамика. Основные задачи динамики.
Последовательность решения задач динамики:
1. Выделяют тело, движение которого
Динамика. Основные задачи динамики.
Последовательность решения задач динамики:
1. Выделяют тело, движение которого
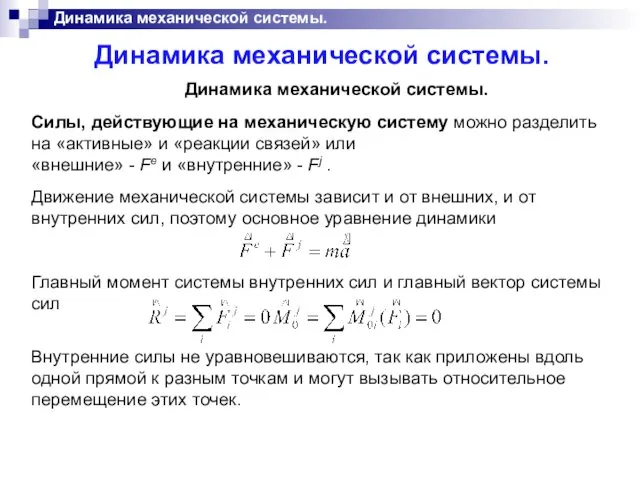
Динамика механической системы.
Динамика механической системы.
Динамика механической системы.
Динамика механической системы.
Динамика механической системы.
Динамика механической системы.
Динамика. Момент инерции.
Моменты инерции твердого тела.
Момент инерции ( I )
Динамика. Момент инерции.
Моменты инерции твердого тела.
Момент инерции ( I )
Динамика. Момент инерции.
Динамика. Момент инерции.
Динамика. Момент инерции.
Динамика. Момент инерции.
Динамика. Момент инерции.
Динамика. Момент инерции.
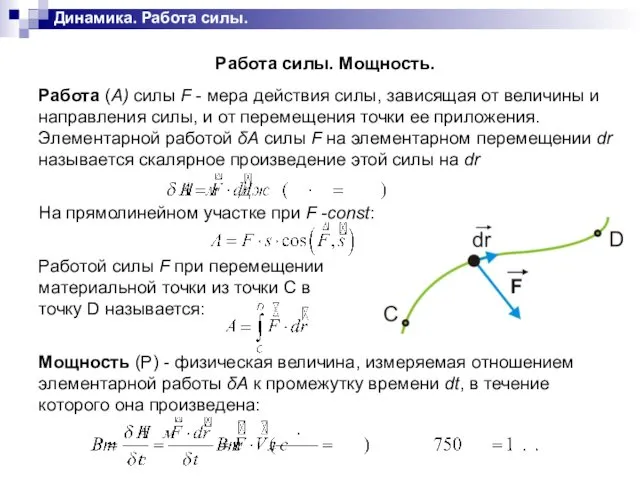
Динамика. Работа силы.
Динамика. Работа силы.
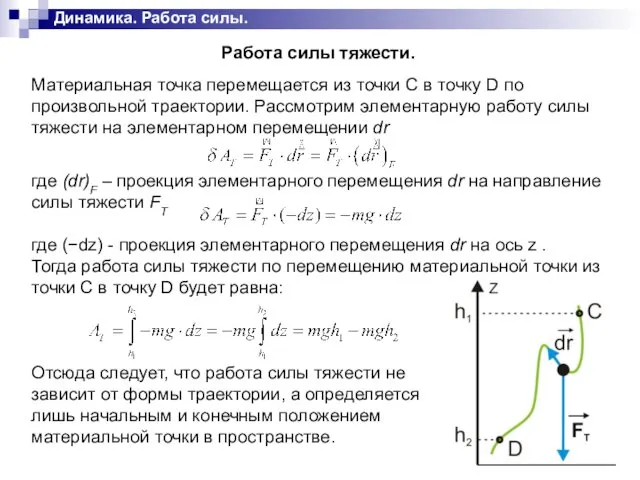
Динамика. Работа силы.
Динамика. Работа силы.
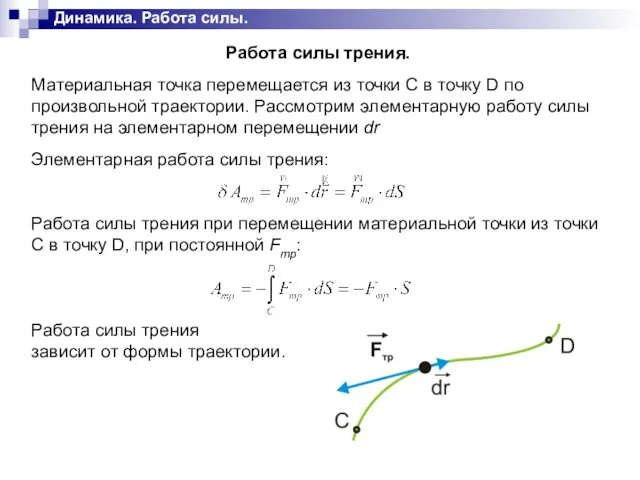
Динамика. Работа силы.
Динамика. Работа силы.
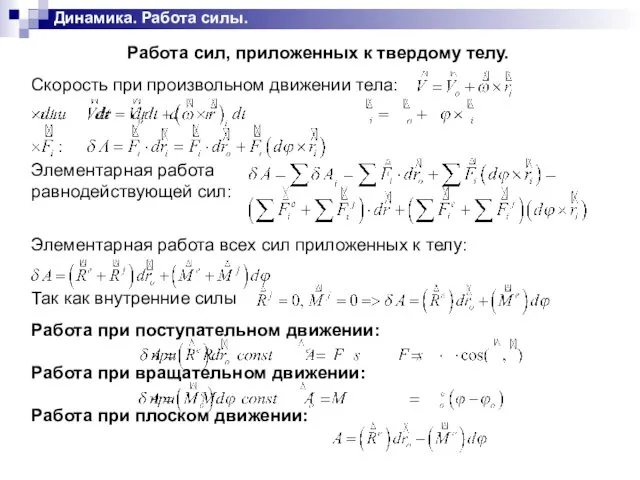
Работа сил, приложенных к твердому телу.
Скорость при произвольном движении тела:
Элементарная работа
Работа сил, приложенных к твердому телу.
Скорость при произвольном движении тела:
Элементарная работа
Динамика. Кинетическая энергия.
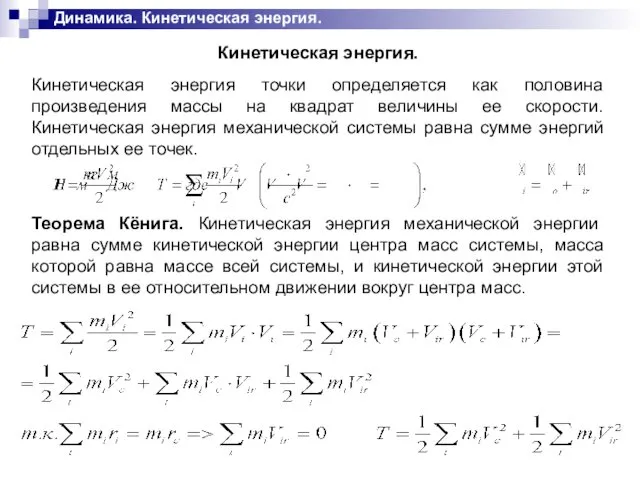
Кинетическая энергия.
Кинетическая энергия точки определяется как половина произведения массы
Динамика. Кинетическая энергия.
Кинетическая энергия.
Кинетическая энергия точки определяется как половина произведения массы
Динамика. Кинетическая энергия.
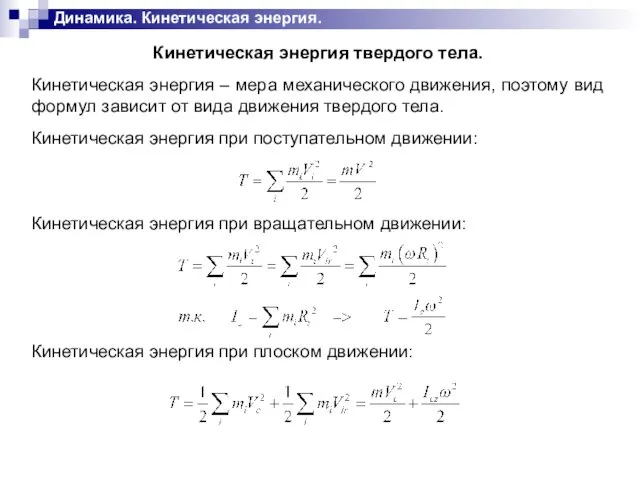
Кинетическая энергия твердого тела.
Кинетическая энергия – мера механического движения,
Динамика. Кинетическая энергия.
Кинетическая энергия твердого тела.
Кинетическая энергия – мера механического движения,
Динамика. Кинетическая энергия.
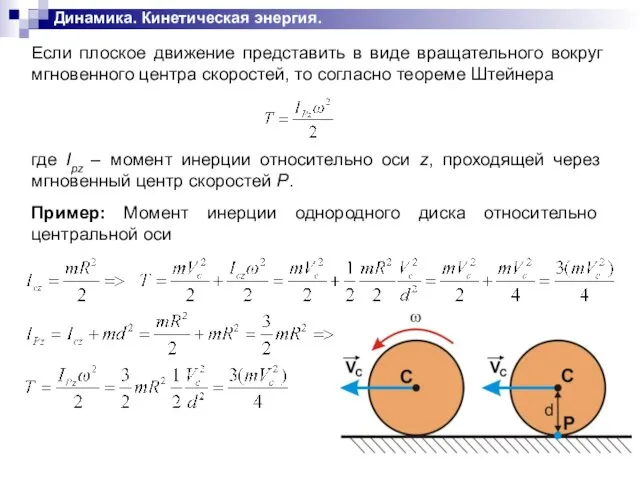
Если плоское движение представить в виде вращательного вокруг мгновенного
Динамика. Кинетическая энергия.
Если плоское движение представить в виде вращательного вокруг мгновенного
Динамика. Кинетическая энергия.
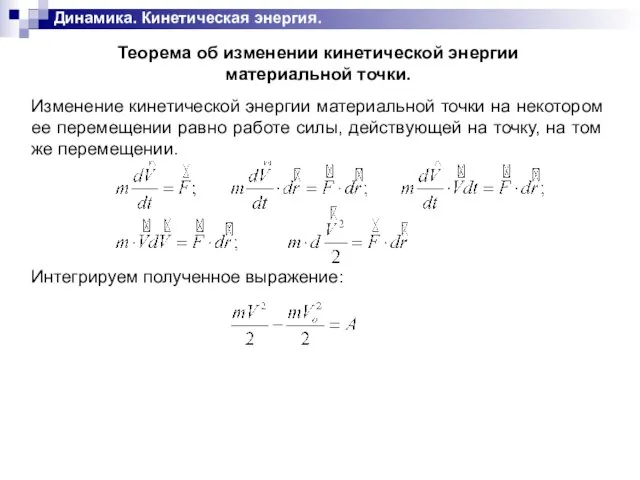
Теорема об изменении кинетической энергии
материальной точки.
Изменение кинетической энергии
Динамика. Кинетическая энергия.
Теорема об изменении кинетической энергии
материальной точки.
Изменение кинетической энергии
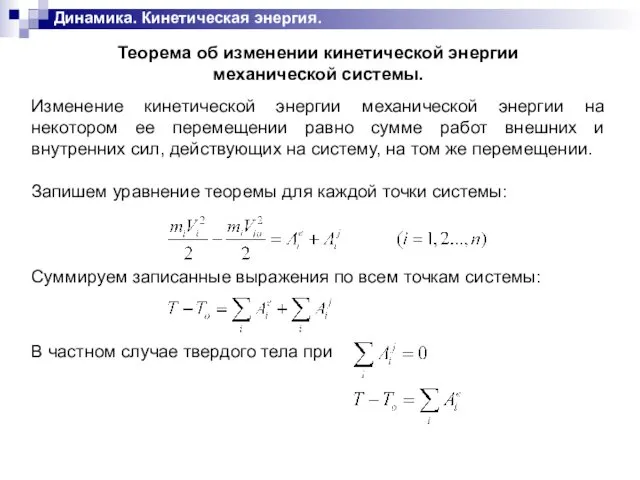
Динамика. Кинетическая энергия.
Теорема об изменении кинетической энергии
механической системы.
Изменение кинетической энергии
Динамика. Кинетическая энергия.
Теорема об изменении кинетической энергии
механической системы.
Изменение кинетической энергии
Динамика. Принцип Даламбера
Принцип Даламбера для материальной точки.
При движении точки в любой
Динамика. Принцип Даламбера
Принцип Даламбера для материальной точки.
При движении точки в любой
Динамика. Принцип Даламбера
Принцип Даламбера для системы
материальных точек.
Если в любой момент
Динамика. Принцип Даламбера
Принцип Даламбера для системы
материальных точек.
Если в любой момент
Динамика. Принцип Даламбера
Момент сил относительно произвольного центра.
Рассматривая принцип Даламбера для системы
Динамика. Принцип Даламбера
Момент сил относительно произвольного центра.
Рассматривая принцип Даламбера для системы
Динамика. Принцип Даламбера
Силы инерции приложенные к твердому телу.
При поступательном движении силы
Динамика. Принцип Даламбера
Силы инерции приложенные к твердому телу.
При поступательном движении силы
Динамика. Связи и их классификация
Связи.
Связями в динамике считают любого вида ограничения,
Динамика. Связи и их классификация
Связи.
Связями в динамике считают любого вида ограничения,
Динамика. Связи и их классификация
Классификация связей.
1. Связи, не изменяющиеся с течением
Динамика. Связи и их классификация
Классификация связей.
1. Связи, не изменяющиеся с течением

Динамика. Принцип возможных перемещений.
Возможные (виртуальные перемещения).
Возможным перемещением механической системы называют любую
Динамика. Принцип возможных перемещений.
Возможные (виртуальные перемещения).
Возможным перемещением механической системы называют любую

Динамика. Принцип возможных перемещений.
Возможная работа.
Элементарная работа, которая на материальную точку сила
Динамика. Принцип возможных перемещений.
Возможная работа.
Элементарная работа, которая на материальную точку сила
Динамика. Общее уравнение динамики.
Принцип Даламбера - Лагранжа.
Представляет собой совмещение принципа Даламбера
Динамика. Общее уравнение динамики.
Принцип Даламбера - Лагранжа.
Представляет собой совмещение принципа Даламбера
Динамика. Общее уравнение динамики.
Согласно принципу Даламбера, для механической системы имеет место
Динамика. Общее уравнение динамики.
Согласно принципу Даламбера, для механической системы имеет место

Динамика. Общее уравнение динамики.
Для идеальных связей:
Следовательно:
- элементарная работа равнодействующей активных сил,
Динамика. Общее уравнение динамики.
Для идеальных связей:
Следовательно:
- элементарная работа равнодействующей активных сил,
 Парогенераторы АЭС. Первичные теплоносители. (Тема 3)
Парогенераторы АЭС. Первичные теплоносители. (Тема 3) Сила трения
Сила трения Синтез наноматериалов золь-гель методом. (Лекция 5)
Синтез наноматериалов золь-гель методом. (Лекция 5) Nanophotonics class 4. Density of states
Nanophotonics class 4. Density of states Изопроцессы
Изопроцессы Сложение скоростей
Сложение скоростей ТРИЗ Электричество
ТРИЗ Электричество Все о ракетах
Все о ракетах Физика в профессии Слесарь по ремонту автомобилей
Физика в профессии Слесарь по ремонту автомобилей Электрооборудование автомобилей. Автоматическая коробка переключения передач с электронным управлением
Электрооборудование автомобилей. Автоматическая коробка переключения передач с электронным управлением Методы оптической молекулярной спектроскопии
Методы оптической молекулярной спектроскопии Types of Forces
Types of Forces Магнітне поле постійного струму
Магнітне поле постійного струму Внутренняя энергия. Первый закон термодинамики
Внутренняя энергия. Первый закон термодинамики Заттың агрегаттық күйлерінің өзгеруі. 8 сынып
Заттың агрегаттық күйлерінің өзгеруі. 8 сынып Тонкостенные оболочки. Основные допущения. Уравнение Лапласа. Лекция 8
Тонкостенные оболочки. Основные допущения. Уравнение Лапласа. Лекция 8 Тяговый расчет автомобиля
Тяговый расчет автомобиля Сообщающие сосуды
Сообщающие сосуды Лампа накаливания
Лампа накаливания Interest in the synthesis of metal nanoparticles by explosion
Interest in the synthesis of metal nanoparticles by explosion Электромагнитные колебания
Электромагнитные колебания Взаимодействие электромагнитных световых волн с веществом. Поляризация света. Виды поляризации
Взаимодействие электромагнитных световых волн с веществом. Поляризация света. Виды поляризации Полевые транзисторы FET (field-effect transistor). Устройство, принципы работы полевых транзисторов различных типов
Полевые транзисторы FET (field-effect transistor). Устройство, принципы работы полевых транзисторов различных типов Физика. Физические основы механики
Физика. Физические основы механики Критерії роботоздатності деталей машин. (Лекція 2)
Критерії роботоздатності деталей машин. (Лекція 2) Дыбыс, кең мағынасында
Дыбыс, кең мағынасында Magnit orici
Magnit orici Законы постоянного тока
Законы постоянного тока