- Структура механизмов

Содержание
- 2. 1. Классификация кинематических пар. Механизм – система твердых тел, объединенных геометрическими или динамическими связями и предназначенная
- 3. 2.
- 4. Звенья входят в состав кинематических пар. Кинематическая пара – это соединение двух соприкасающихся звеньев, допускающее их
- 5. 4. Основные виды кинематических пар
- 6. 5. Формула Чебышева для плоских механизмов. Структурная формула для определения числа степеней свободы плоских механизмов впервые
- 7. 6. Формула Малышева для пространственных механизмов Число степеней свободы W пространственного механизма определяется числом и видом
- 8. 7. Избыточные связи Дублирующие связи называются избыточными, так как удаление их из механизма не вызывает изменения
- 9. 8. Пример расчета. n = 4 рн = 6 рв = 0 Wрасч = 3n -
- 10. 9. Структурный анализ и синтез плоских рычажных механизмов Основные определения: Обобщённые координаты механизма – независимые между
- 11. 10. Структурные группы Ассура Образование сложных плоских рычажных механизмов осуществляется присоединением одной или нескольких структурных групп
- 12. 11. Структурные группы Ассура Число звеньев n и число кинематических пар p1 в структурных группах, таблица1:
- 13. 12. Структурные группы Ассура. Пример: Механизм качающегося конвейера с двумя двухповодковыми структурными группами
- 14. 13. Структурные группы Ассура. Случай б из таблицы 1, структурная группа содержит 4 звена (n =4)
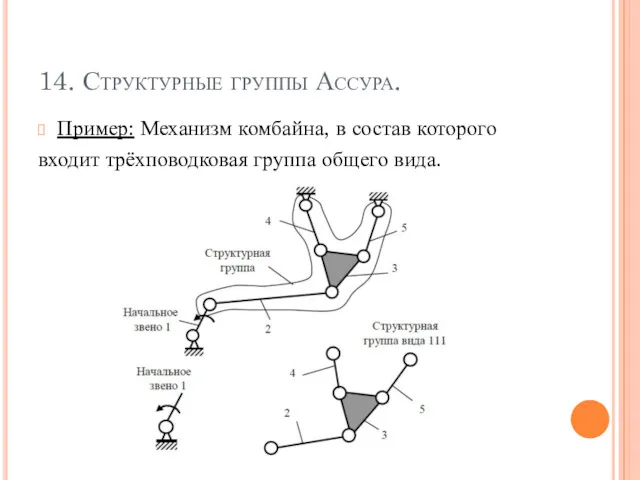
- 15. 14. Структурные группы Ассура. Пример: Механизм комбайна, в состав которого входит трёхповодковая группа общего вида.
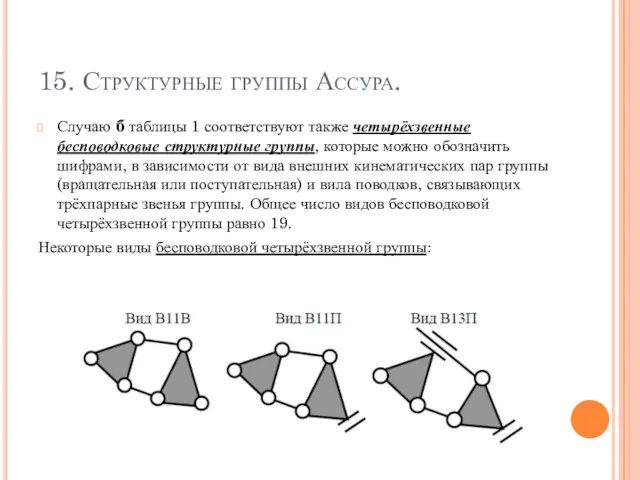
- 16. 15. Структурные группы Ассура. Случаю б таблицы 1 соответствуют также четырёхзвенные бесповодковые структурные группы, которые можно
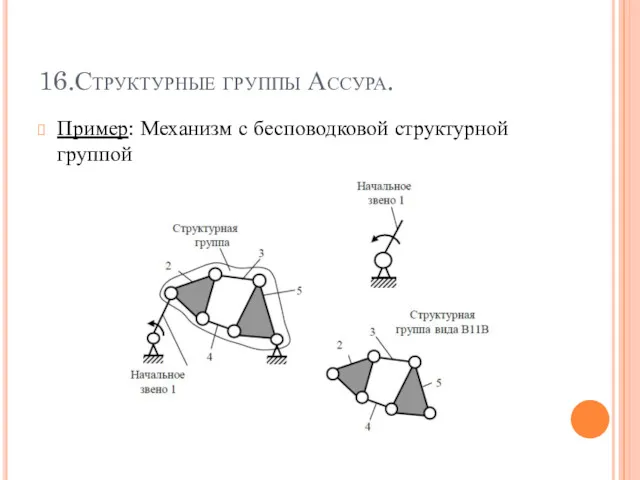
- 17. 16.Структурные группы Ассура. Пример: Механизм с бесповодковой структурной группой
- 19. Скачать презентацию
1. Классификация кинематических пар.
Механизм – система твердых тел, объединенных геометрическими
1. Классификация кинематических пар.
Механизм – система твердых тел, объединенных геометрическими
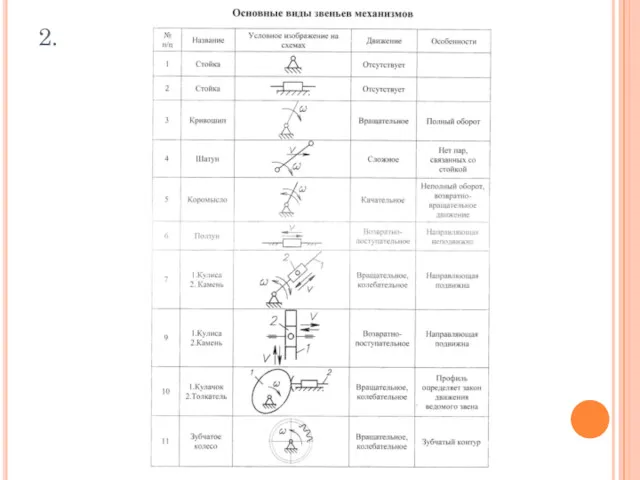
2.
2.
Звенья входят в состав кинематических пар.
Кинематическая пара – это соединение двух
Кинематическая пара – это соединение двух
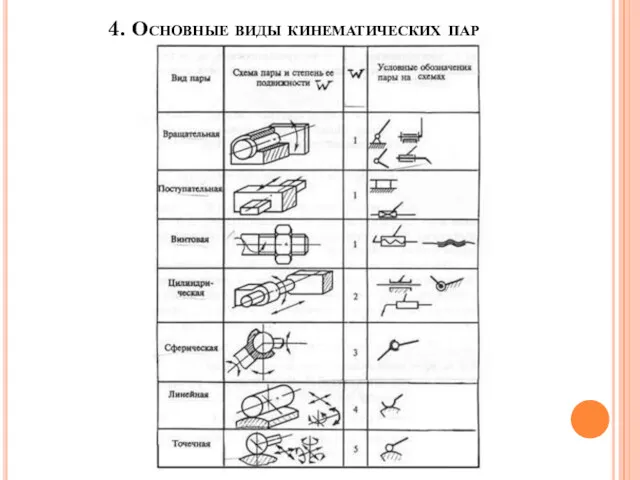
4. Основные виды кинематических пар
4. Основные виды кинематических пар
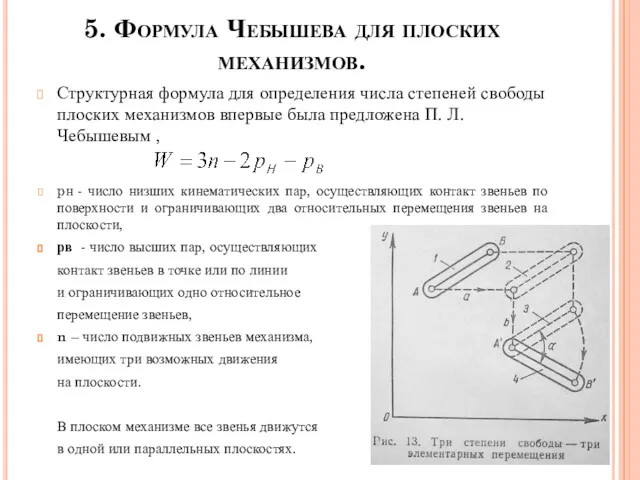
5. Формула Чебышева для плоских механизмов.
Структурная формула для определения числа степеней
5. Формула Чебышева для плоских механизмов.
Структурная формула для определения числа степеней
6. Формула Малышева для пространственных механизмов
Число степеней свободы W пространственного
6. Формула Малышева для пространственных механизмов
Число степеней свободы W пространственного
7. Избыточные связи
Дублирующие связи называются избыточными, так как удаление их из
7. Избыточные связи
Дублирующие связи называются избыточными, так как удаление их из
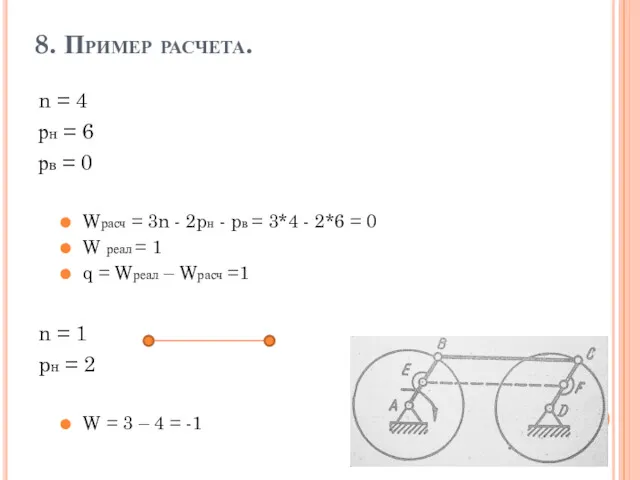
8. Пример расчета.
n = 4
рн = 6
рв = 0
Wрасч = 3n
8. Пример расчета.
n = 4
рн = 6
рв = 0
Wрасч = 3n
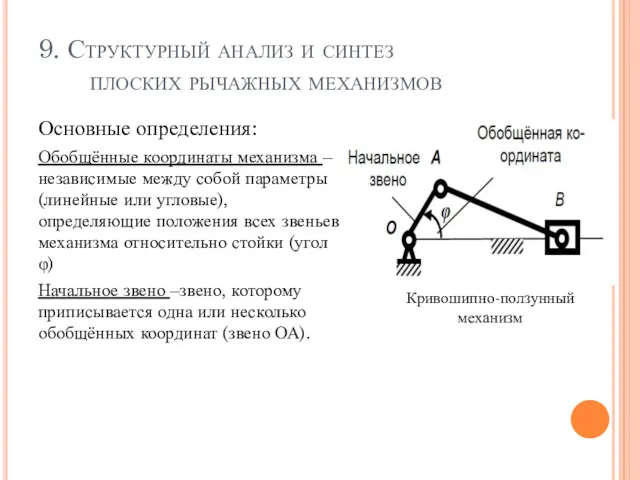
9. Структурный анализ и синтез
плоских рычажных механизмов
Основные определения:
Обобщённые координаты механизма
9. Структурный анализ и синтез
плоских рычажных механизмов
Основные определения:
Обобщённые координаты механизма
10. Структурные группы Ассура
Образование сложных плоских рычажных механизмов осуществляется присоединением одной
10. Структурные группы Ассура
Образование сложных плоских рычажных механизмов осуществляется присоединением одной
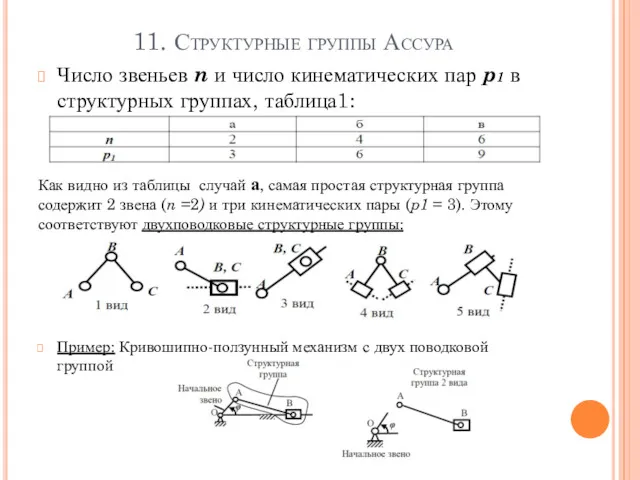
11. Структурные группы Ассура
Число звеньев n и число кинематических пар p1
11. Структурные группы Ассура
Число звеньев n и число кинематических пар p1
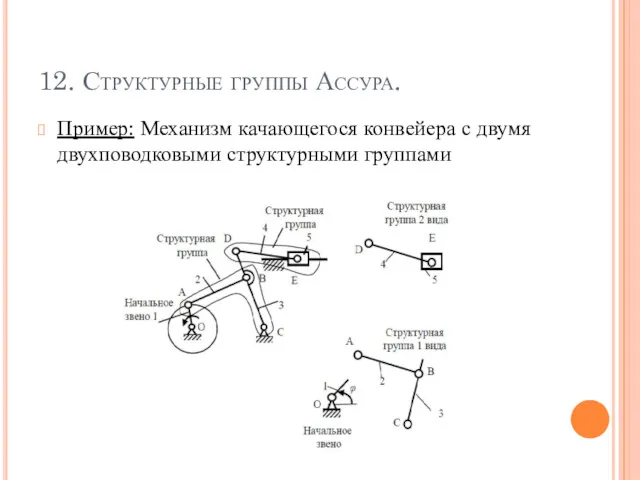
12. Структурные группы Ассура.
Пример: Механизм качающегося конвейера с двумя двухповодковыми структурными
12. Структурные группы Ассура.
Пример: Механизм качающегося конвейера с двумя двухповодковыми структурными
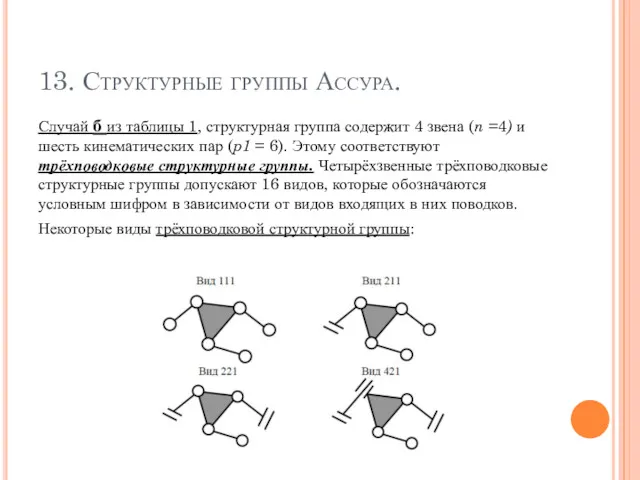
13. Структурные группы Ассура.
Случай б из таблицы 1, структурная группа содержит
13. Структурные группы Ассура.
Случай б из таблицы 1, структурная группа содержит
14. Структурные группы Ассура.
Пример: Механизм комбайна, в состав которого
входит трёхповодковая группа
14. Структурные группы Ассура.
Пример: Механизм комбайна, в состав которого
входит трёхповодковая группа
15. Структурные группы Ассура.
Случаю б таблицы 1 соответствуют также четырёхзвенные бесповодковые
15. Структурные группы Ассура.
Случаю б таблицы 1 соответствуют также четырёхзвенные бесповодковые
16.Структурные группы Ассура.
Пример: Механизм с бесповодковой структурной группой
16.Структурные группы Ассура.
Пример: Механизм с бесповодковой структурной группой
 Решение задач на применение законов Ньютона
Решение задач на применение законов Ньютона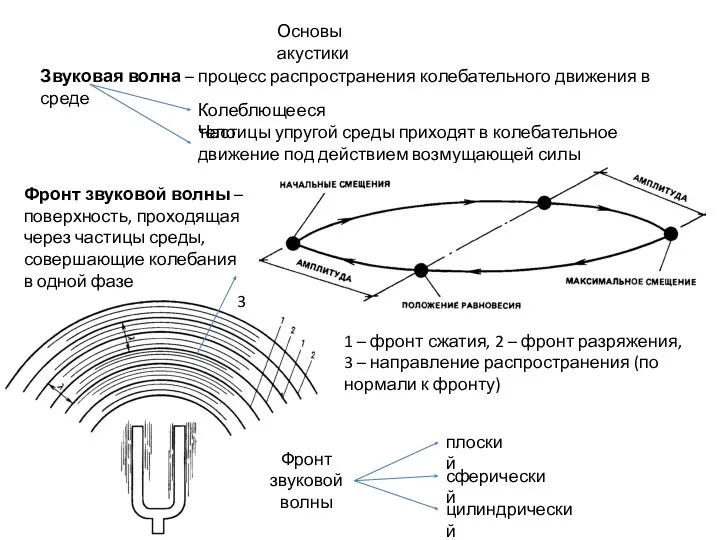 Основы акустики
Основы акустики Восстановление деталей. Гальваника
Восстановление деталей. Гальваника Физико-технические основы электроэнергетики
Физико-технические основы электроэнергетики Тест для 8 класса Электрический ток
Тест для 8 класса Электрический ток Оптика. Световые явления. (Урок 29 -30)
Оптика. Световые явления. (Урок 29 -30) Научно-исследовательская деятельность как фактор развития личности ученика и роста педагогического мастерства учителя.
Научно-исследовательская деятельность как фактор развития личности ученика и роста педагогического мастерства учителя. Линзы. Построение изображений в линзах
Линзы. Построение изображений в линзах Електричний струм у газах. Самостійний і несамостійний газові розряди. Плазма
Електричний струм у газах. Самостійний і несамостійний газові розряди. Плазма Открытый урок в 7 кл на тему Плавание тел
Открытый урок в 7 кл на тему Плавание тел Ручное изготовление кольца с использованием традиционных материалов
Ручное изготовление кольца с использованием традиционных материалов Ходовая часть автомобиля
Ходовая часть автомобиля Нанокерамикалық материалдардың артықшылықтары
Нанокерамикалық материалдардың артықшылықтары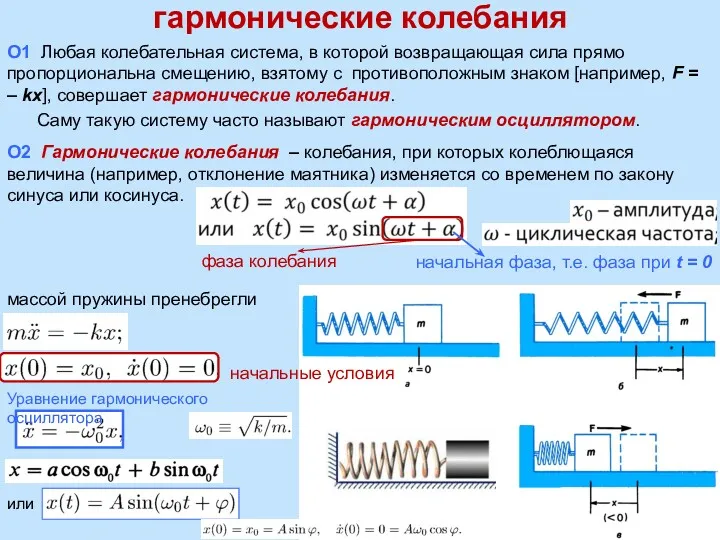 Гармонические колебания
Гармонические колебания Английский язык в механике
Английский язык в механике Рост наноструктур и микроскопия. Методы выращивания наноструктур
Рост наноструктур и микроскопия. Методы выращивания наноструктур Механические свойства материалов. Диаграммы растяжения и сжатия. (Лекция 4)
Механические свойства материалов. Диаграммы растяжения и сжатия. (Лекция 4) Работа тока и мощность электрического тока
Работа тока и мощность электрического тока Условия плавания тел в жидкости
Условия плавания тел в жидкости Закон Ома
Закон Ома Сила упругости. Закон Гука
Сила упругости. Закон Гука Электр тогы. Электр тізбегі
Электр тогы. Электр тізбегі Трение. Центр тяжести
Трение. Центр тяжести Экспериментальные методы исследования частиц. Ядерная физика. 9 класс
Экспериментальные методы исследования частиц. Ядерная физика. 9 класс Our knowledge in the field of fundamental physics
Our knowledge in the field of fundamental physics Обслуживание топливной аппаратуры грузовых автомобилей
Обслуживание топливной аппаратуры грузовых автомобилей Обприскувачі. Лабораторна робота
Обприскувачі. Лабораторна робота Механические колебания
Механические колебания