- Техническая механика

Содержание
- 2. Введение В разделе «Теоретическая механика» изучаются основные законы движения твердых тел и их взаимодействие. В разделе
- 3. Рекомендуемая литература 1. Тарг С.М. Краткий курс теоретической механики. – М.: Наука, 2001 (2008). Александров А.В.,
- 4. Теоретическая механика. Теоретическая механика изучает основные законы движения твердых тел и их взаимодействие. Механическим движением называется
- 5. 3. Введение По характеру рассматриваемых задач теоретическую механику разделяют на статику, кинематику и динамику. В статике
- 6. 4. Введение Основные абстрактные модели реальных тел: материальная точка – имеет массу, но не имеет размеров;
- 7. 6. Введение. Положение объекта относительно другого физического тела (например, Земли) определяется при помощи выбранной системы координат
- 8. 7. Статика Статикой называется часть механики, где изучаются условия, которым должны удовлетворять силы, действующие на систему
- 9. 8. Статика. Система материальных точек находится в равновесии, если, будучи в покое, она не получает никакого
- 10. 9. Статика. Аксиомы. Все теоремы и уравнения статики выводятся из нескольких исходных положений, называемых аксиомами. Аксиомы,
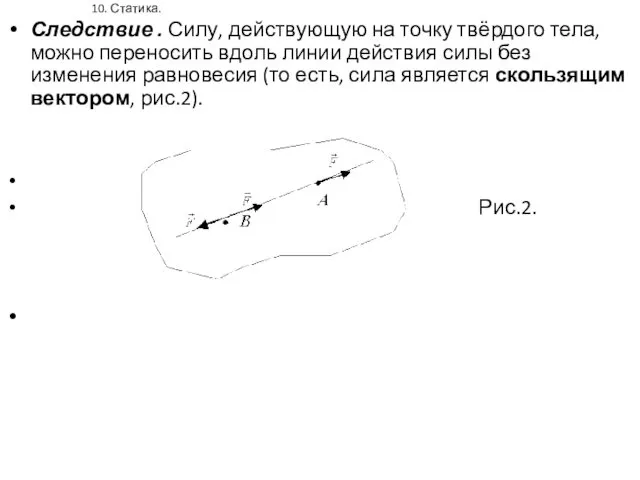
- 11. 10. Статика. Следствие . Силу, действующую на точку твёрдого тела, можно переносить вдоль линии действия силы
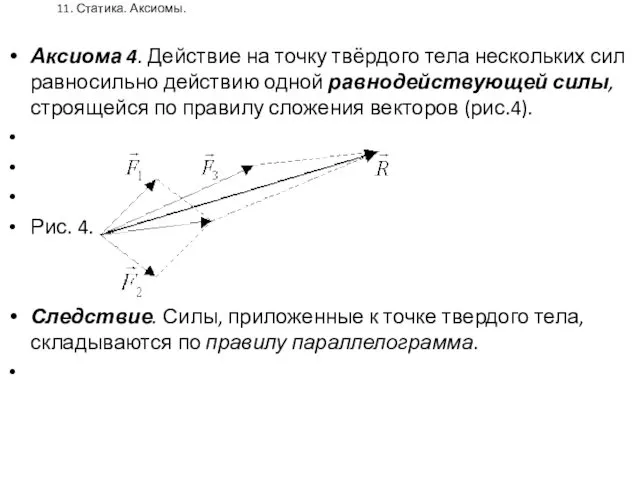
- 12. 11. Статика. Аксиомы. Аксиома 4. Действие на точку твёрдого тела нескольких сил равносильно действию одной равнодействующей
- 13. 13. Статика. Аксиомы. Аксиома 5. Если деформируемое (не абсолютно твердое) тело, находящееся под действием сил в
- 14. 14. Статика. Аксиомы. Действие одного тела на другое никогда не может быть односторонним: мы всегда наблюдаем
- 15. 15. Статика. Аксиомы. Аксиома 6. Действие одного тела на второе равно и противоположно действию этого второго
- 16. 16. Статика. Аксиомы. Аксиома 7. Связи, наложенные на систему материальных точек, можно заменить силами реакций, действие
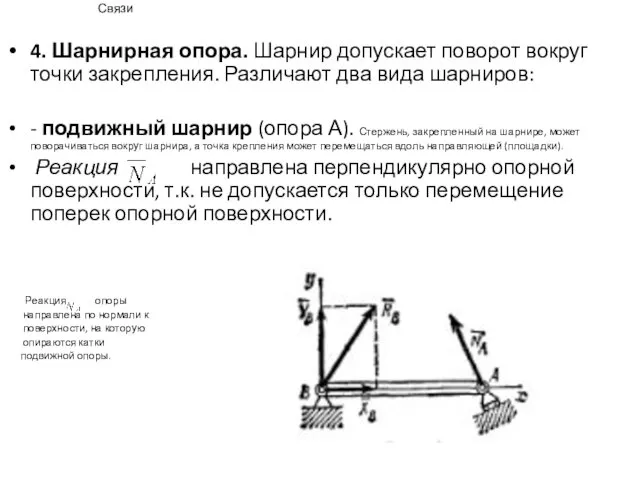
- 17. Связи 4. Шарнирная опора. Шарнир допускает поворот вокруг точки закрепления. Различают два вида шарниров: - подвижный
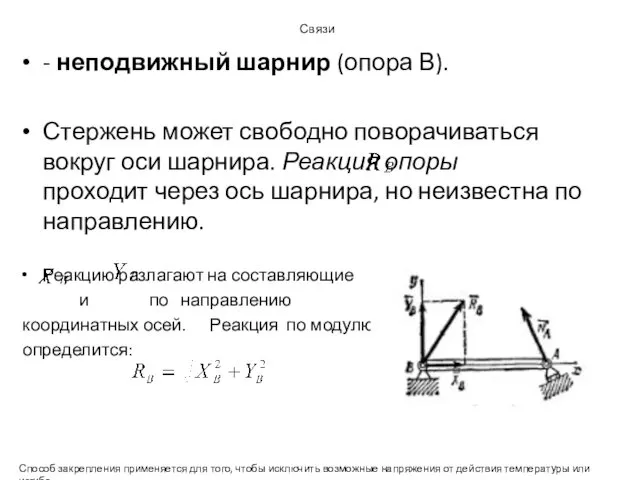
- 18. Связи - неподвижный шарнир (опора В). Стержень может свободно поворачиваться вокруг оси шарнира. Реакция опоры проходит
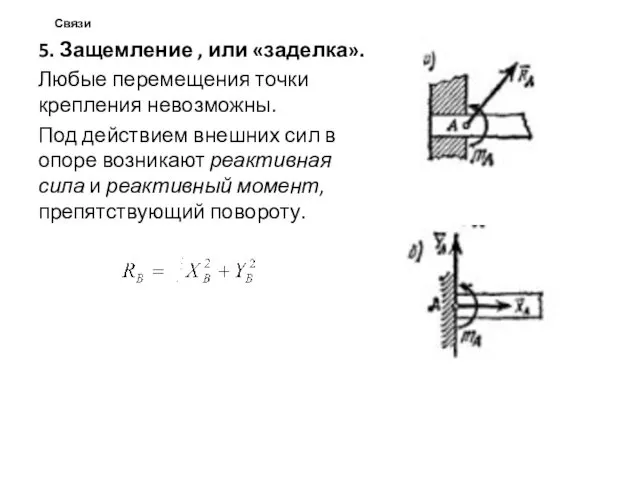
- 19. Связи 5. Защемление , или «заделка». Любые перемещения точки крепления невозможны. Под действием внешних сил в
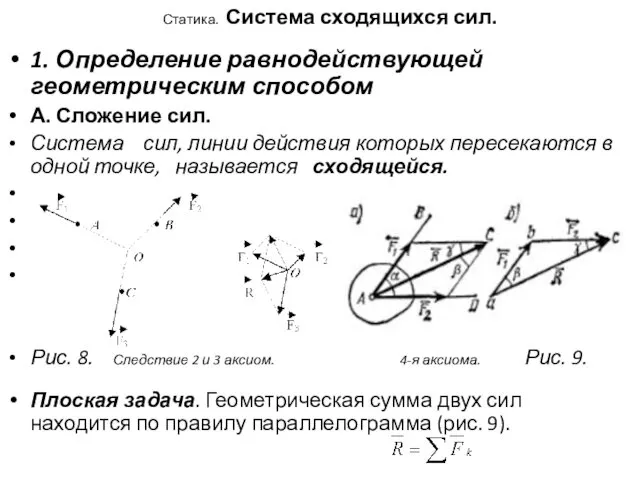
- 20. Статика. Система сходящихся сил. 1. Определение равнодействующей геометрическим способом А. Сложение сил. Система сил, линии действия
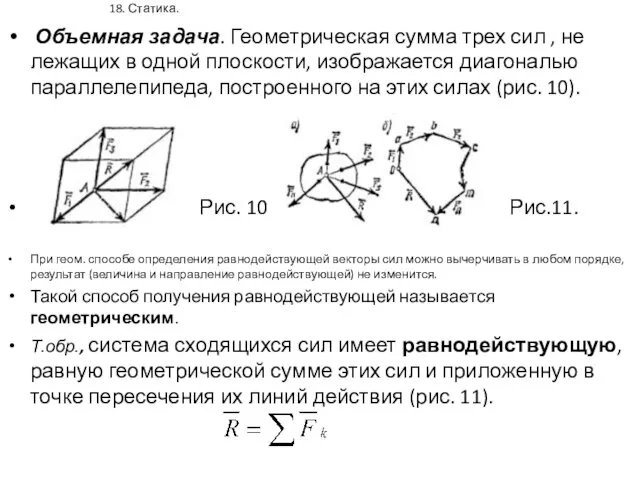
- 21. 18. Статика. Объемная задача. Геометрическая сумма трех сил , не лежащих в одной плоскости, изображается диагональю
- 22. 19. Статика. Б. Разложение сил. Способом разложения удобно пользоваться при определении сил давления тела на связи
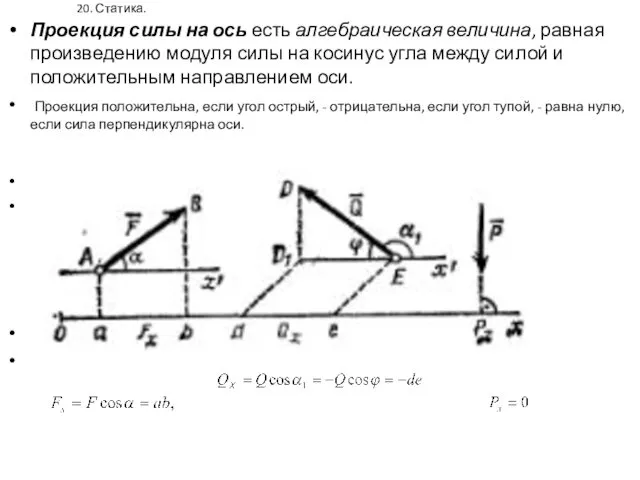
- 23. 20. Статика. Проекция силы на ось есть алгебраическая величина, равная произведению модуля силы на косинус угла
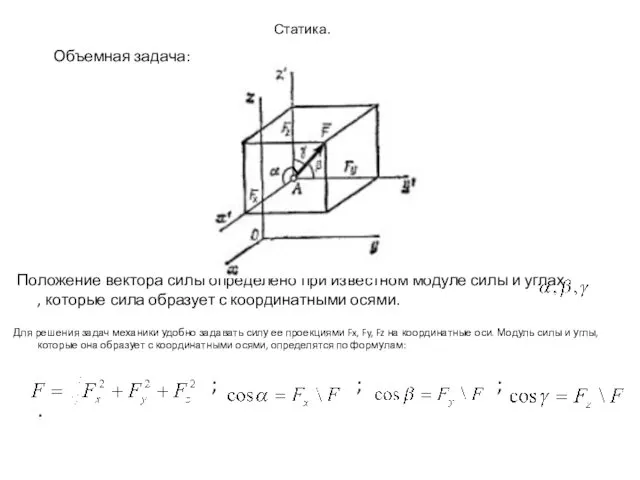
- 24. Статика. Объемная задача: Положение вектора силы определено при известном модуле силы и углах , которые сила
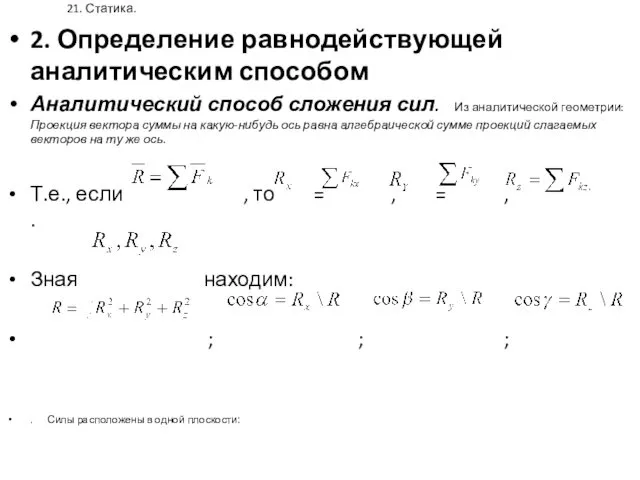
- 25. 21. Статика. 2. Определение равнодействующей аналитическим способом Аналитический способ сложения сил. Из аналитической геометрии: Проекция вектора
- 26. 22. Статика. Равновесие системы сходящихся сил. Геометрическое условие равновесия. Для равновесия системы сходящихся сил необходимо и
- 27. 23. Статика. Равновесие системы сходящихся сил. Аналитические условия равновесия. Аналитический модуль главного вектора: . Следовательно, =0,
- 28. 23. Статика. Момент силы . Момент силы относительно центра Под действием силы тело может совершать вращательное
- 29. 24. Статика. Момент силы. Моментом силы относительно центра О называется приложенный в центре О вектор ,
- 30. Статика. Момент силы. Свойства момента силы: - при переносе точки приложения силы вдоль линии ее действия
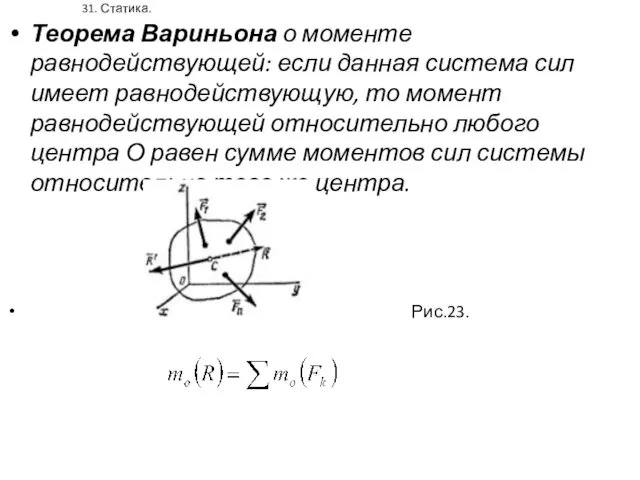
- 31. 31. Статика. Теорема Вариньона о моменте равнодействующей: если данная система сил имеет равнодействующую, то момент равнодействующей
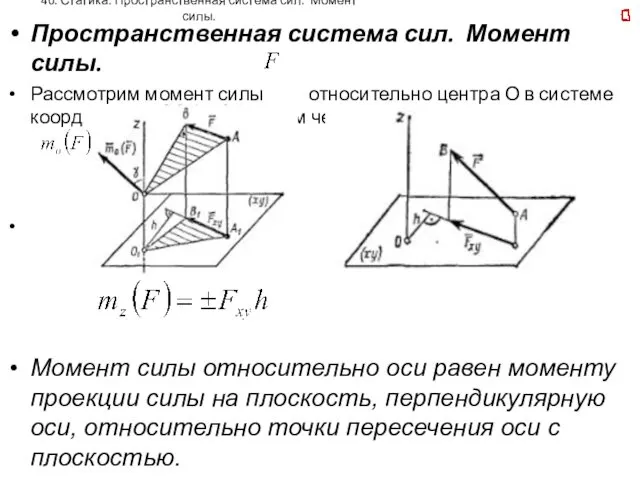
- 32. 40. Статика. Пространственная система сил. Момент силы. Пространственная система сил. Момент силы. Рассмотрим момент силы относительно
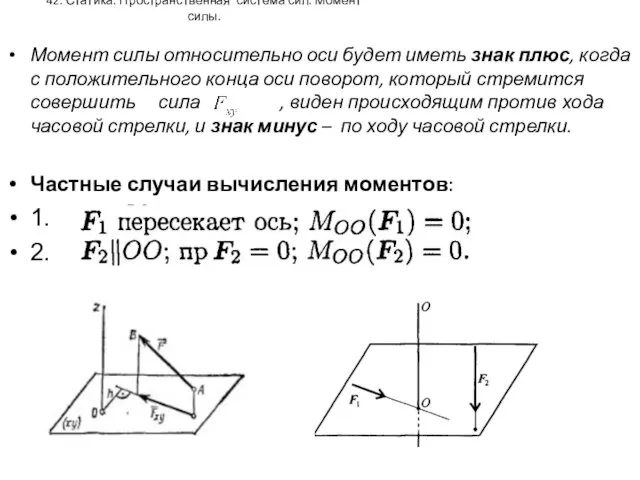
- 33. 42. Статика. Пространственная система сил. Момент силы. Момент силы относительно оси будет иметь знак плюс, когда
- 34. 43. Статика. Момент силы относительно оси. Теорема Вариньона для момента силы относительно оси. Если обе части
- 35. 25. Статика. Пара сил. Момент пары сил Система двух параллельных сил, равных по величине и направленных
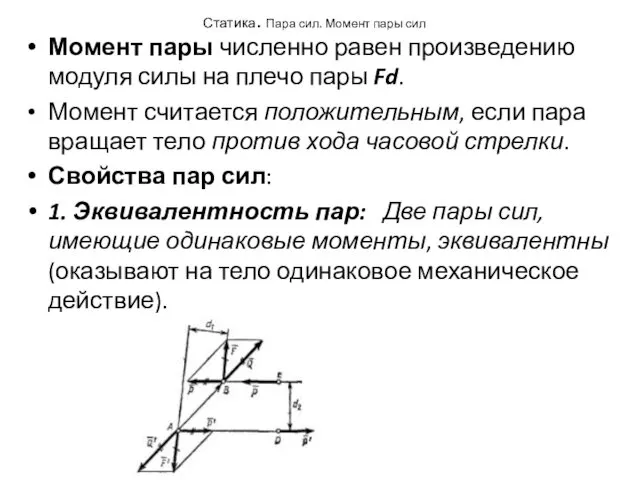
- 36. Статика. Пара сил. Момент пары сил Момент пары численно равен произведению модуля силы на плечо пары
- 37. 27. Статика. Момент пары сил. .
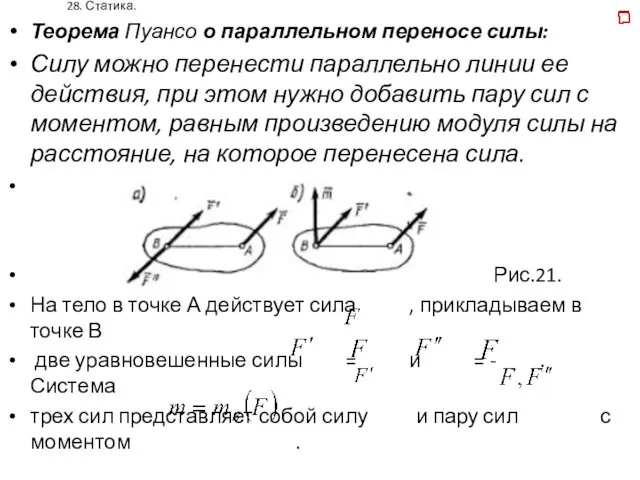
- 38. 28. Статика. Теорема Пуансо о параллельном переносе силы: Силу можно перенести параллельно линии ее действия, при
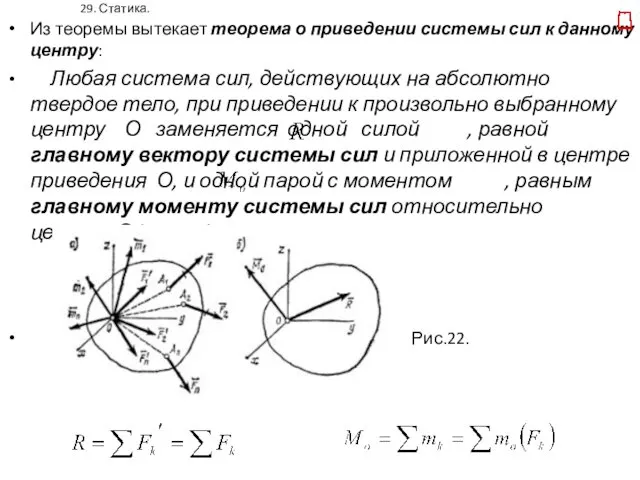
- 39. 29. Статика. Из теоремы вытекает теорема о приведении системы сил к данному центру: Любая система сил,
- 40. 30. Статика. Теорема о приведении системы сил к данному центру. Следствие (условие эквивалентности систем сил): две
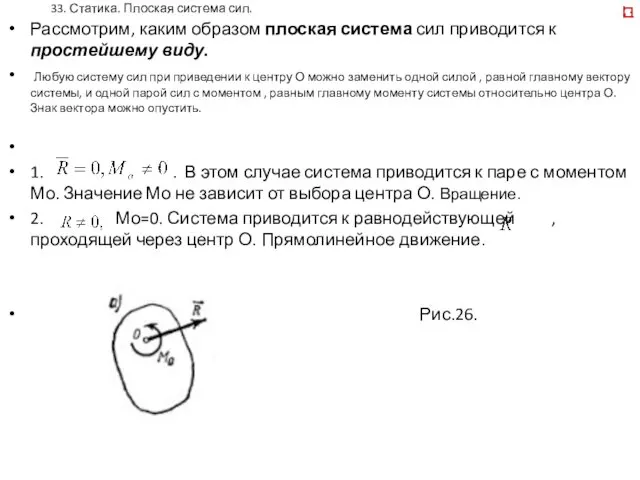
- 41. 33. Статика. Плоская система сил. Рассмотрим, каким образом плоская система сил приводится к простейшему виду. Любую
- 42. 34. Статика. Плоская система сил. Рассмотрим равновесие плоской системы сил. Для равновесия системы сил должны соблюдаться
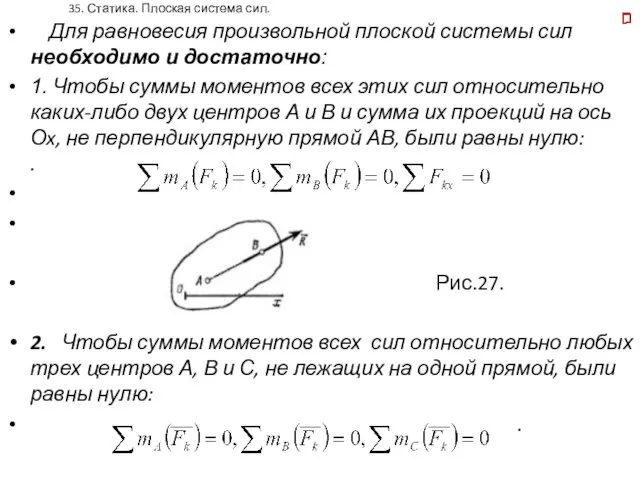
- 43. 35. Статика. Плоская система сил. Для равновесия произвольной плоской системы сил необходимо и достаточно: 1. Чтобы
- 44. 36. Статика. Плоская система сил. Случай параллельных сил. Если направить ось Ох перпендикулярно силам, а ось
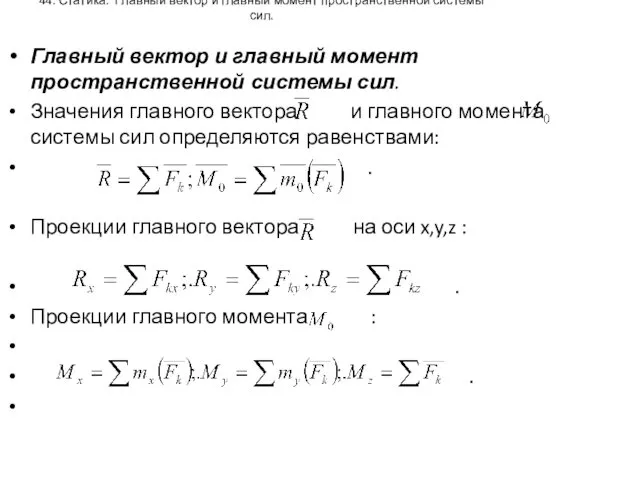
- 45. 44. Статика. Главный вектор и главный момент пространственной системы сил. Главный вектор и главный момент пространственной
- 46. 45. Статика. Равновесие пространственной системы. Равновесие произвольной пространственной системы сил Условия равновесия любой системы сил: Но
- 47. Балочные системы. Определение реакций опор и моментов защемления 1. Виды нагрузок и разновидности опор По способу
- 48. Балочные системы В задачах статики для абсолютно твердых тел распределенную нагрузку можно заменить равнодействующей сосредоточенной силой.
- 49. Разновидности балочных систем Балка – прямой брус, закрепленный на опорах и изгибаемый приложенными к нему силами.
- 50. Разновидности балочных систем
- 51. Разновидности балочных систем
- 52. Разновидности балочных систем
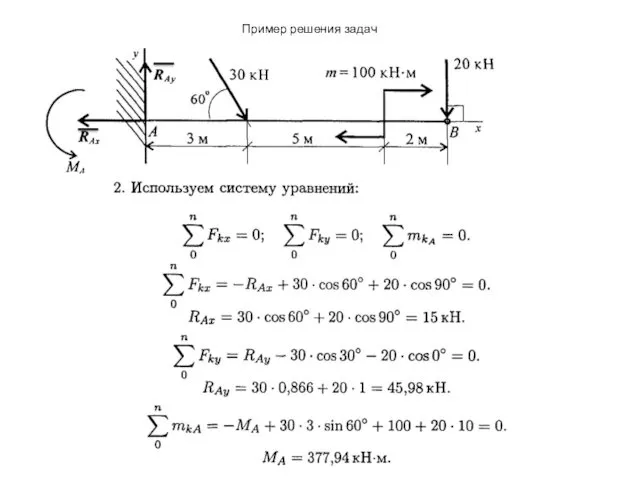
- 53. Пример решения задач
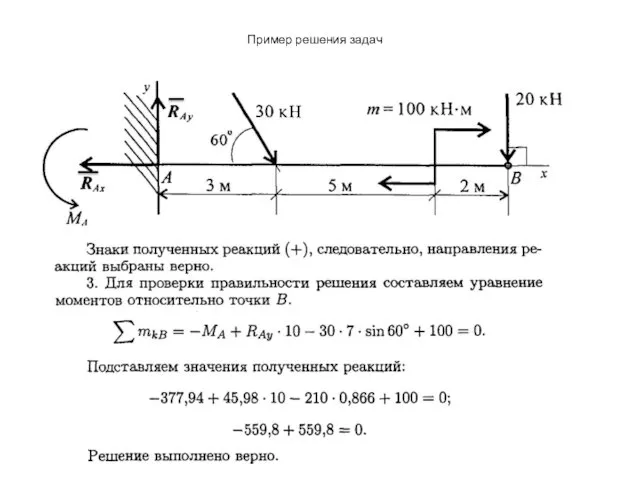
- 54. Пример решения задач
- 55. Пример решения задач
- 56. Понятие о трении. Виды трения
- 57. Понятие о трении. Виды трения
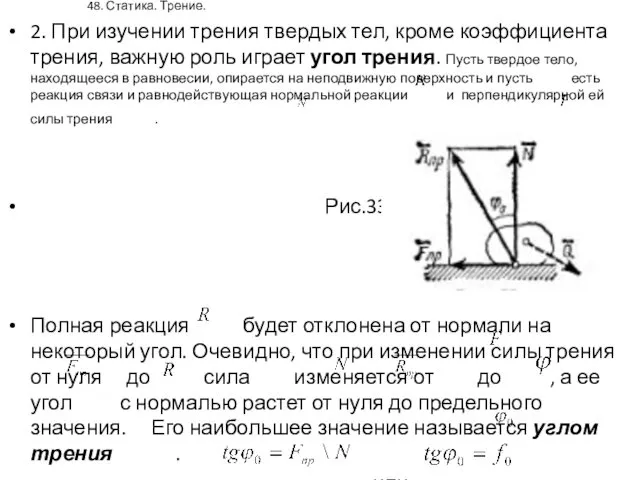
- 58. 48. Статика. Трение. 2. При изучении трения твердых тел, кроме коэффициента трения, важную роль играет угол
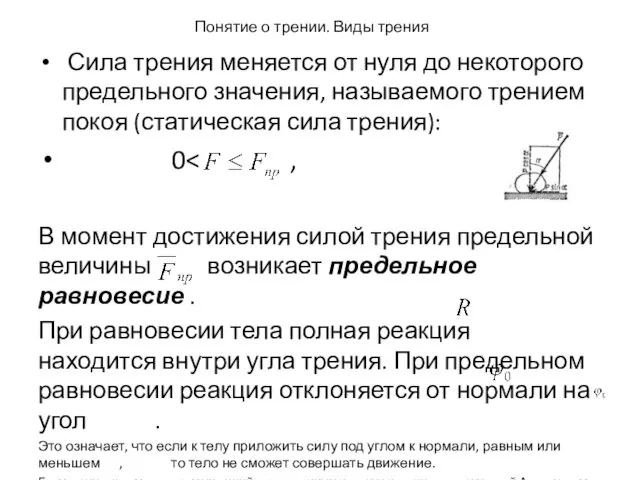
- 59. Понятие о трении. Виды трения Сила трения меняется от нуля до некоторого предельного значения, называемого трением
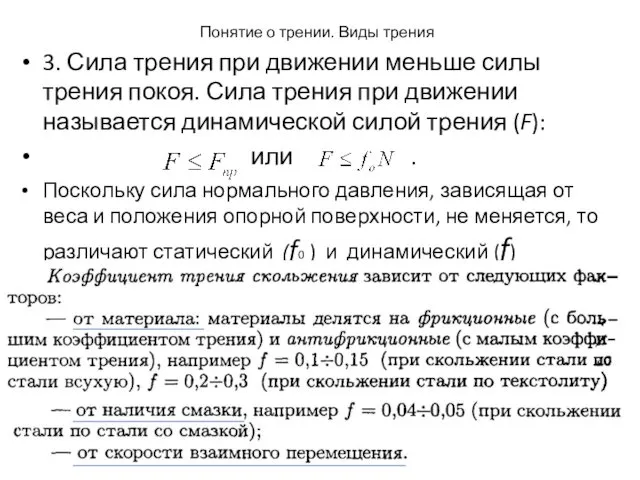
- 60. Понятие о трении. Виды трения 3. Сила трения при движении меньше силы трения покоя. Сила трения
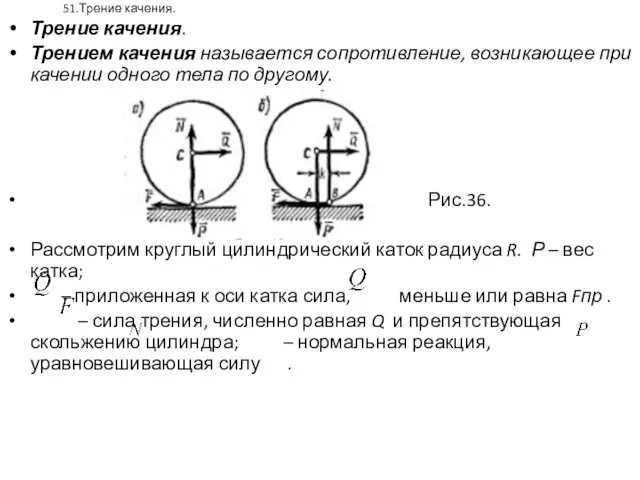
- 61. 51.Трение качения. Трение качения. Трением качения называется сопротивление, возникающее при качении одного тела по другому. Рис.36.
- 62. 52. Статика. Трения качения. На практике касание тел происходит по некоторой площадке АВ (рис. Б) При
- 63. Центр тяжести Сила тяжести – равнодействующая сил притяжения Земли, она распределена по всему объему тела. Силы
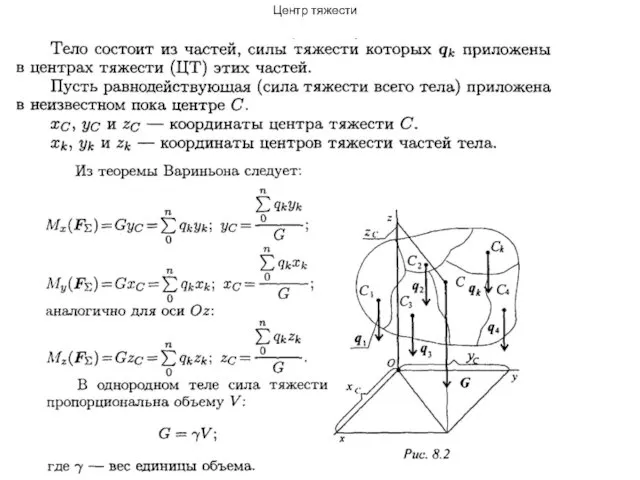
- 64. Центр тяжести
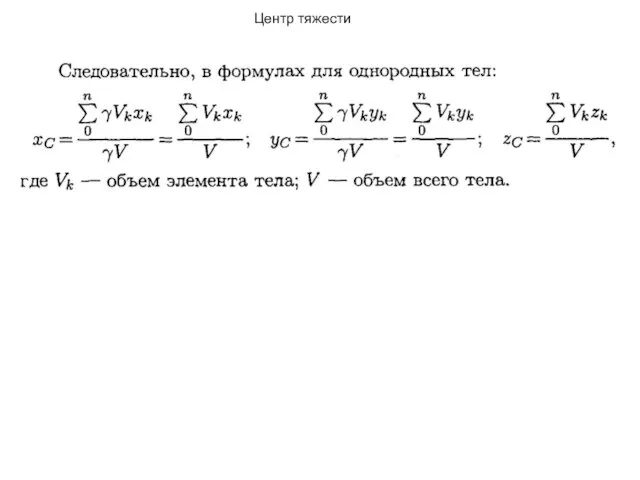
- 65. Центр тяжести
- 66. Центр тяжести плоских тел (плоских фигур) Для плоских фигур справедливо выражение: V=Ah, где А – площадь
- 67. Центр тяжести плоских тел (плоских фигур)
- 70. Скачать презентацию
Введение
В разделе «Теоретическая механика» изучаются основные законы движения твердых тел и
Введение
В разделе «Теоретическая механика» изучаются основные законы движения твердых тел и
Рекомендуемая литература
1. Тарг С.М. Краткий курс теоретической механики. –
Рекомендуемая литература
1. Тарг С.М. Краткий курс теоретической механики. –
Теоретическая механика.
Теоретическая механика изучает основные законы движения твердых тел и их
Теоретическая механика. Теоретическая механика изучает основные законы движения твердых тел и их
3. Введение
По характеру рассматриваемых задач теоретическую механику разделяют на статику, кинематику
3. Введение
По характеру рассматриваемых задач теоретическую механику разделяют на статику, кинематику
4. Введение
Основные абстрактные модели реальных тел:
материальная точка – имеет массу,
4. Введение
Основные абстрактные модели реальных тел:
материальная точка – имеет массу,
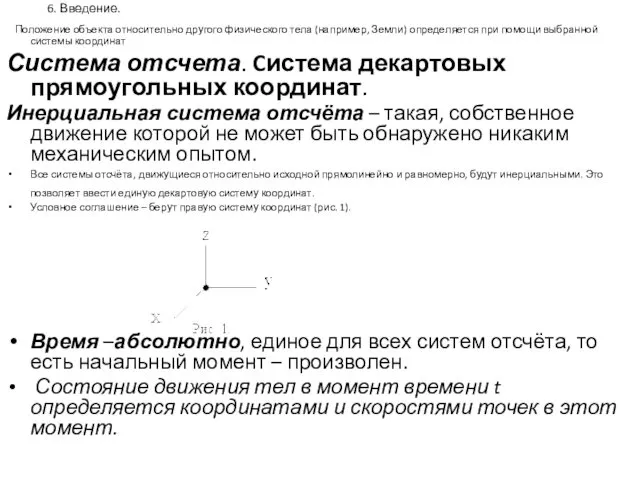
6. Введение.
Положение объекта относительно другого физического тела (например, Земли) определяется при
6. Введение.
Положение объекта относительно другого физического тела (например, Земли) определяется при
7. Статика
Статикой называется часть механики, где изучаются условия, которым должны удовлетворять
7. Статика
Статикой называется часть механики, где изучаются условия, которым должны удовлетворять
8. Статика.
Система материальных точек находится в равновесии, если, будучи в покое,
8. Статика.
Система материальных точек находится в равновесии, если, будучи в покое,
9. Статика. Аксиомы.
Все теоремы и уравнения статики выводятся из нескольких
9. Статика. Аксиомы.
Все теоремы и уравнения статики выводятся из нескольких
10. Статика.
Следствие . Силу, действующую на точку твёрдого тела, можно переносить
10. Статика.
Следствие . Силу, действующую на точку твёрдого тела, можно переносить
11. Статика. Аксиомы.
Аксиома 4. Действие на точку твёрдого тела нескольких сил
11. Статика. Аксиомы.
Аксиома 4. Действие на точку твёрдого тела нескольких сил
13. Статика. Аксиомы.
Аксиома 5. Если деформируемое (не абсолютно твердое) тело, находящееся
13. Статика. Аксиомы.
Аксиома 5. Если деформируемое (не абсолютно твердое) тело, находящееся
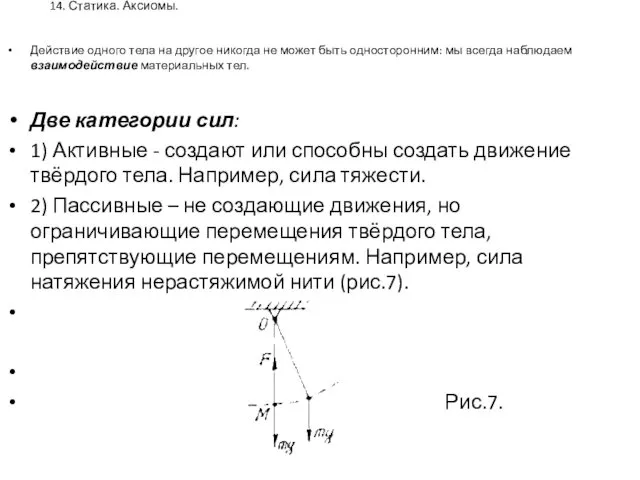
14. Статика. Аксиомы.
Действие одного тела на другое никогда не может быть
14. Статика. Аксиомы.
Действие одного тела на другое никогда не может быть
15. Статика. Аксиомы.
Аксиома 6. Действие одного тела на второе равно
15. Статика. Аксиомы.
Аксиома 6. Действие одного тела на второе равно
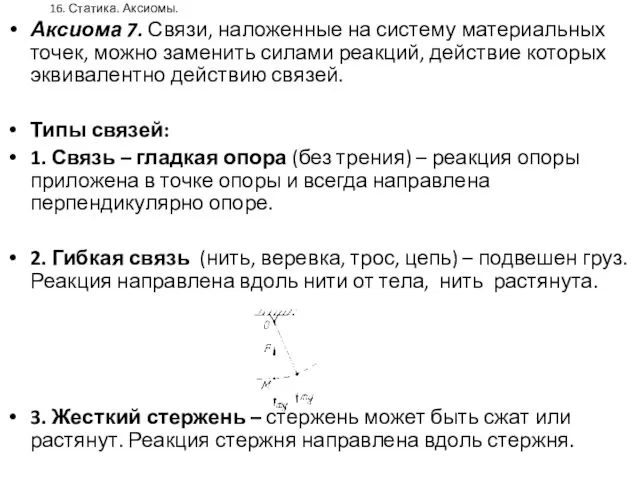
16. Статика. Аксиомы.
Аксиома 7. Связи, наложенные на систему материальных точек, можно
16. Статика. Аксиомы.
Аксиома 7. Связи, наложенные на систему материальных точек, можно
Связи
4. Шарнирная опора. Шарнир допускает поворот вокруг точки закрепления. Различают
Связи
4. Шарнирная опора. Шарнир допускает поворот вокруг точки закрепления. Различают
Связи
- неподвижный шарнир (опора В).
Стержень может свободно поворачиваться вокруг оси
Связи
- неподвижный шарнир (опора В).
Стержень может свободно поворачиваться вокруг оси
Связи
5. Защемление , или «заделка».
Любые перемещения точки крепления невозможны.
Под действием внешних
Связи
5. Защемление , или «заделка».
Любые перемещения точки крепления невозможны.
Под действием внешних
Статика. Система сходящихся сил.
1. Определение равнодействующей геометрическим способом
А. Сложение
Статика. Система сходящихся сил.
1. Определение равнодействующей геометрическим способом
А. Сложение
18. Статика.
Объемная задача. Геометрическая сумма трех сил , не лежащих
18. Статика.
Объемная задача. Геометрическая сумма трех сил , не лежащих
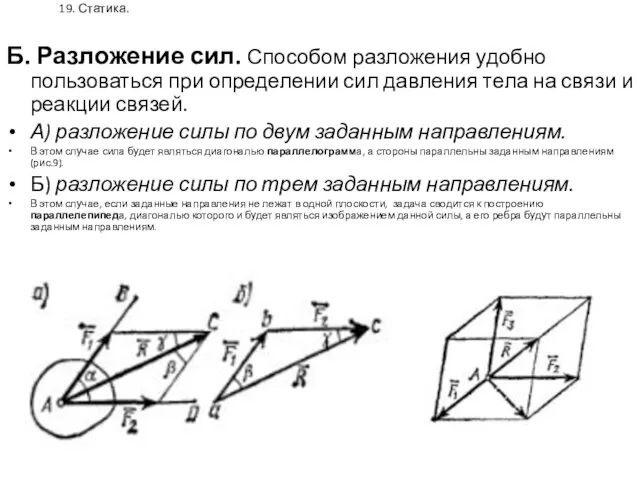
19. Статика.
Б. Разложение сил. Способом разложения удобно пользоваться при определении сил
19. Статика.
Б. Разложение сил. Способом разложения удобно пользоваться при определении сил
20. Статика.
Проекция силы на ось есть алгебраическая величина, равная произведению модуля
20. Статика.
Проекция силы на ось есть алгебраическая величина, равная произведению модуля
Статика.
Объемная задача:
Положение вектора силы определено при известном модуле силы и
Статика.
Объемная задача:
Положение вектора силы определено при известном модуле силы и
21. Статика.
2. Определение равнодействующей аналитическим способом
Аналитический способ сложения сил. Из
21. Статика.
2. Определение равнодействующей аналитическим способом
Аналитический способ сложения сил. Из
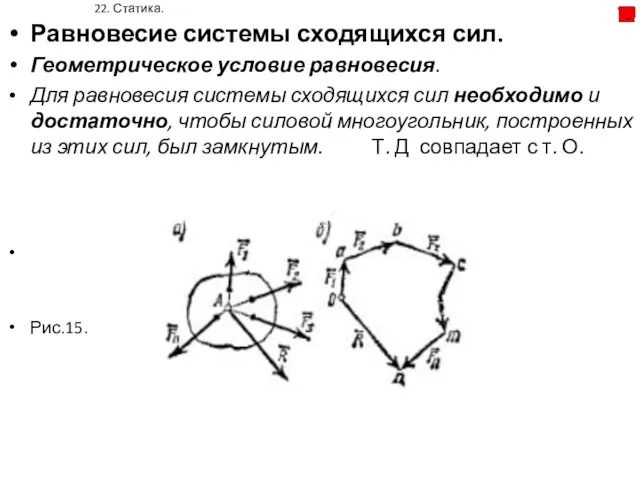
22. Статика.
Равновесие системы сходящихся сил.
Геометрическое условие равновесия.
Для равновесия системы сходящихся
22. Статика.
Равновесие системы сходящихся сил.
Геометрическое условие равновесия.
Для равновесия системы сходящихся
23. Статика.
Равновесие системы сходящихся сил.
Аналитические условия равновесия.
Аналитический модуль главного вектора:
23. Статика.
Равновесие системы сходящихся сил.
Аналитические условия равновесия.
Аналитический модуль главного вектора:
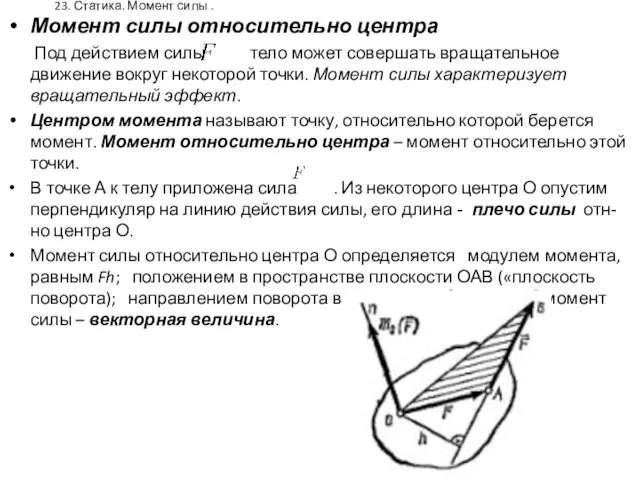
23. Статика. Момент силы .
Момент силы относительно центра
Под действием силы
23. Статика. Момент силы .
Момент силы относительно центра
Под действием силы
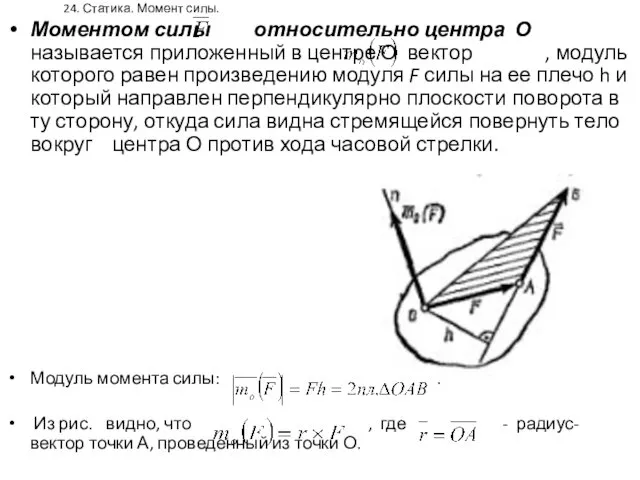
24. Статика. Момент силы.
Моментом силы относительно центра О называется приложенный в
24. Статика. Момент силы.
Моментом силы относительно центра О называется приложенный в
Статика. Момент силы.
Свойства момента силы:
- при переносе точки приложения силы
Статика. Момент силы.
Свойства момента силы:
- при переносе точки приложения силы
31. Статика.
Теорема Вариньона о моменте равнодействующей: если данная система сил имеет
31. Статика.
Теорема Вариньона о моменте равнодействующей: если данная система сил имеет
40. Статика. Пространственная система сил. Момент силы.
Пространственная система сил. Момент силы.
Рассмотрим
40. Статика. Пространственная система сил. Момент силы.
Пространственная система сил. Момент силы.
Рассмотрим
42. Статика. Пространственная система сил. Момент силы.
Момент силы относительно оси
42. Статика. Пространственная система сил. Момент силы.
Момент силы относительно оси
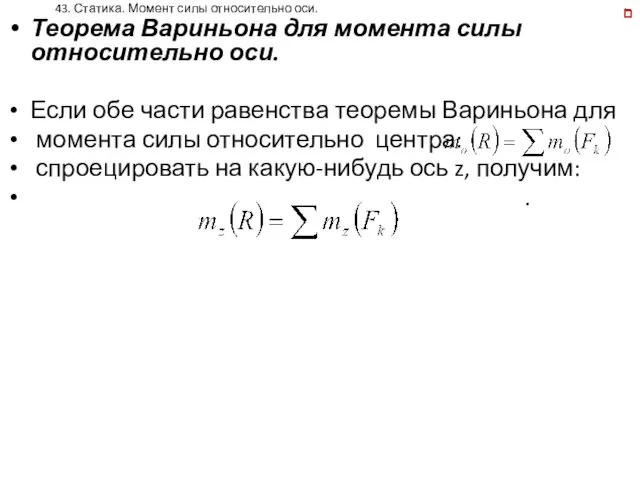
43. Статика. Момент силы относительно оси.
Теорема Вариньона для момента силы
43. Статика. Момент силы относительно оси.
Теорема Вариньона для момента силы
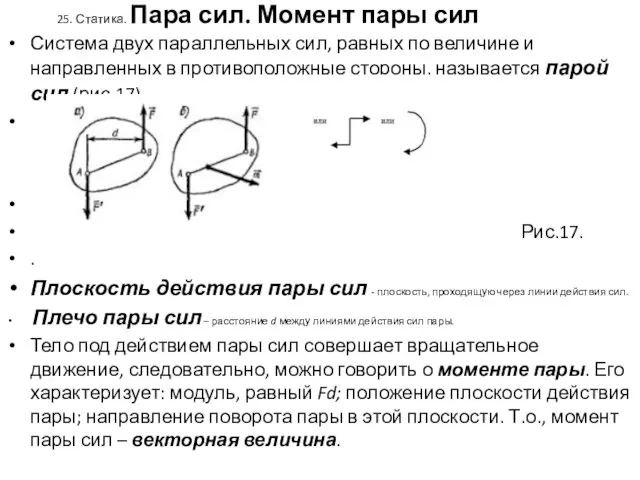
25. Статика. Пара сил. Момент пары сил
Система двух параллельных сил, равных
25. Статика. Пара сил. Момент пары сил
Система двух параллельных сил, равных
Статика. Пара сил. Момент пары сил
Момент пары численно равен произведению
Статика. Пара сил. Момент пары сил
Момент пары численно равен произведению
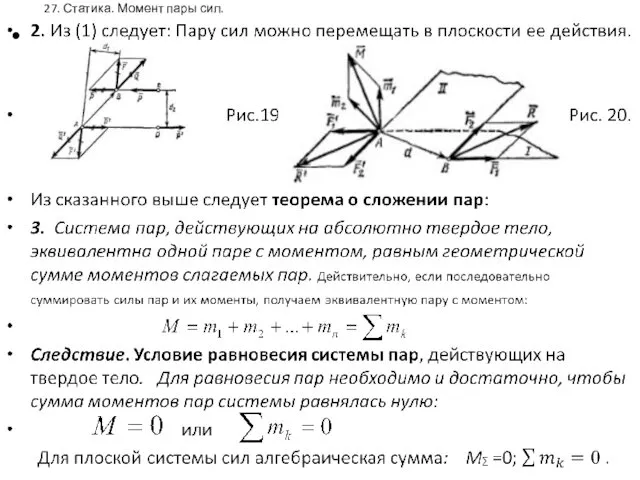
27. Статика. Момент пары сил.
.
27. Статика. Момент пары сил.
.
28. Статика.
Теорема Пуансо о параллельном переносе силы:
Силу можно перенести параллельно линии
28. Статика.
Теорема Пуансо о параллельном переносе силы:
Силу можно перенести параллельно линии
29. Статика.
Из теоремы вытекает теорема о приведении системы сил к данному
29. Статика.
Из теоремы вытекает теорема о приведении системы сил к данному
30. Статика. Теорема о приведении системы сил к данному центру.
Следствие (условие
30. Статика. Теорема о приведении системы сил к данному центру.
Следствие (условие
33. Статика. Плоская система сил.
Рассмотрим, каким образом плоская система сил приводится
33. Статика. Плоская система сил.
Рассмотрим, каким образом плоская система сил приводится
34. Статика. Плоская система сил.
Рассмотрим равновесие плоской системы сил.
Для равновесия системы
34. Статика. Плоская система сил.
Рассмотрим равновесие плоской системы сил.
Для равновесия системы
35. Статика. Плоская система сил.
Для равновесия произвольной плоской системы сил
35. Статика. Плоская система сил.
Для равновесия произвольной плоской системы сил
36. Статика. Плоская система сил.
Случай параллельных сил. Если направить ось
36. Статика. Плоская система сил.
Случай параллельных сил. Если направить ось
44. Статика. Главный вектор и главный момент пространственной системы сил.
Главный вектор
44. Статика. Главный вектор и главный момент пространственной системы сил.
Главный вектор
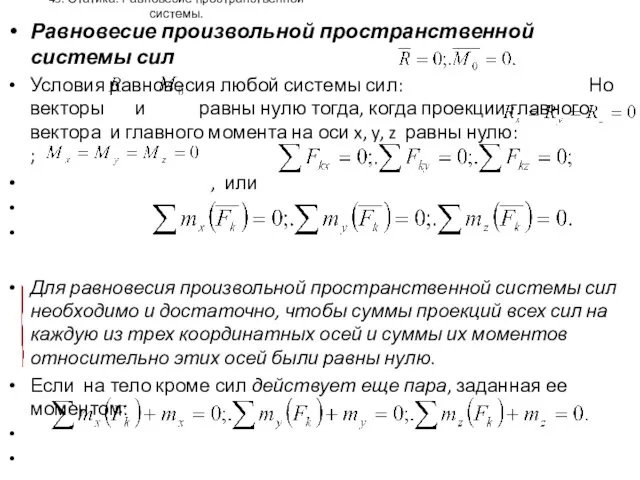
45. Статика. Равновесие пространственной системы.
Равновесие произвольной пространственной системы сил
Условия равновесия любой
45. Статика. Равновесие пространственной системы.
Равновесие произвольной пространственной системы сил
Условия равновесия любой
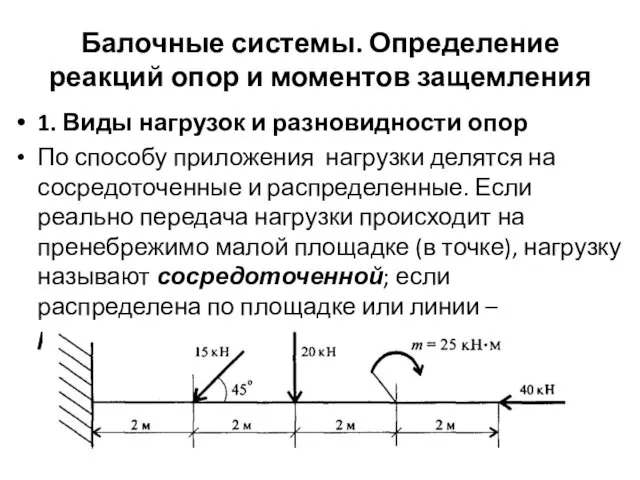
Балочные системы. Определение реакций опор и моментов защемления
1. Виды нагрузок и
Балочные системы. Определение реакций опор и моментов защемления
1. Виды нагрузок и
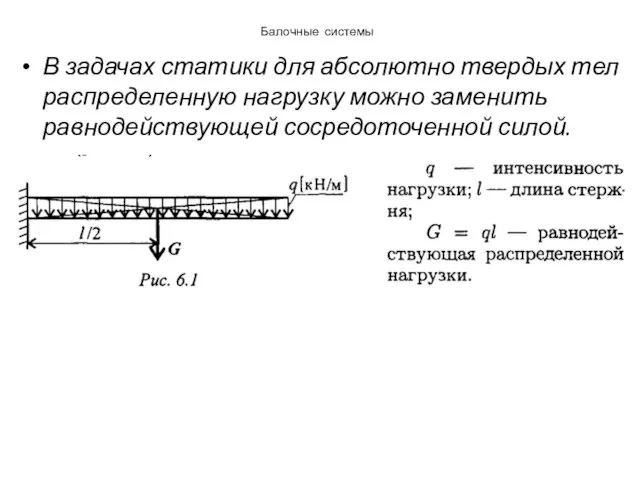
Балочные системы
В задачах статики для абсолютно твердых тел распределенную нагрузку можно
Балочные системы
В задачах статики для абсолютно твердых тел распределенную нагрузку можно
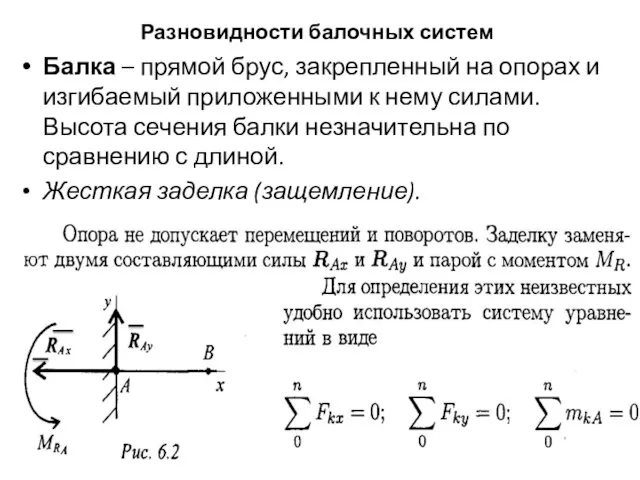
Разновидности балочных систем
Балка – прямой брус, закрепленный на опорах и изгибаемый
Разновидности балочных систем
Балка – прямой брус, закрепленный на опорах и изгибаемый
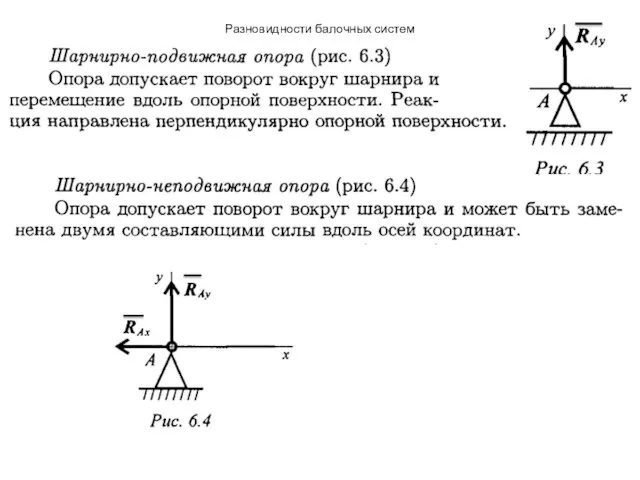
Разновидности балочных систем
Разновидности балочных систем
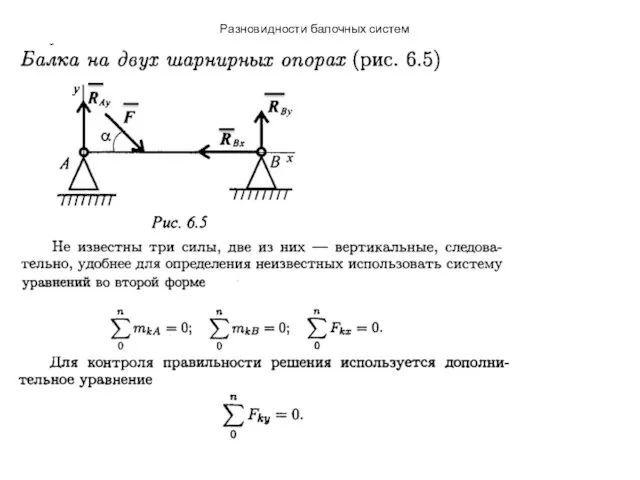
Разновидности балочных систем
Разновидности балочных систем
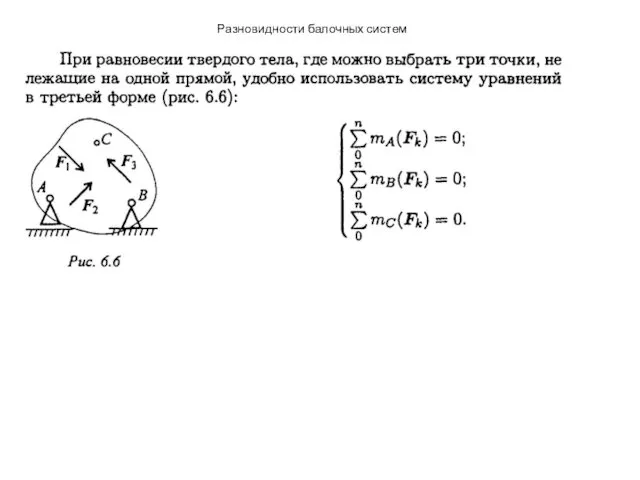
Разновидности балочных систем
Разновидности балочных систем
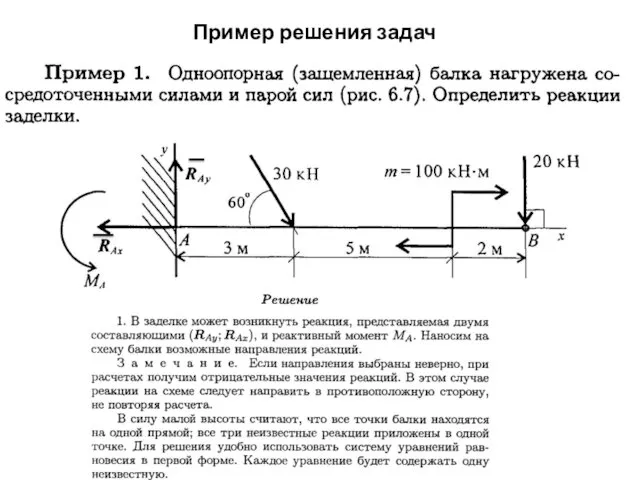
Пример решения задач
Пример решения задач
Пример решения задач
Пример решения задач
Пример решения задач
Пример решения задач
Понятие о трении. Виды трения
Понятие о трении. Виды трения
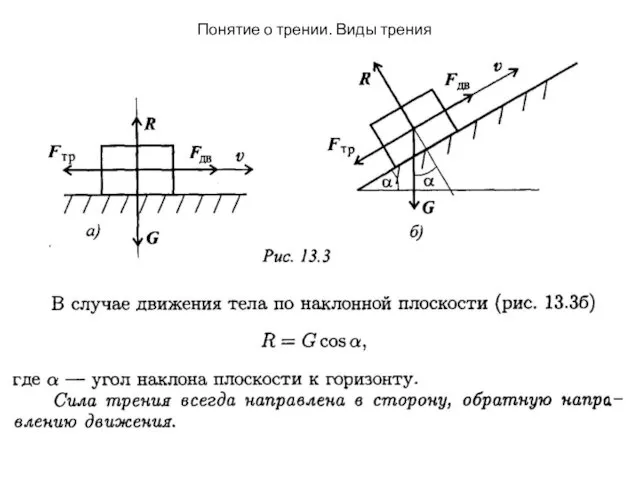
Понятие о трении. Виды трения
Понятие о трении. Виды трения
48. Статика. Трение.
2. При изучении трения твердых тел, кроме коэффициента трения,
48. Статика. Трение.
2. При изучении трения твердых тел, кроме коэффициента трения,
Понятие о трении. Виды трения
Сила трения меняется от нуля до
Понятие о трении. Виды трения
Сила трения меняется от нуля до
Понятие о трении. Виды трения
3. Сила трения при движении меньше силы
Понятие о трении. Виды трения
3. Сила трения при движении меньше силы
51.Трение качения.
Трение качения.
Трением качения называется сопротивление, возникающее при качении одного тела
51.Трение качения.
Трение качения.
Трением качения называется сопротивление, возникающее при качении одного тела
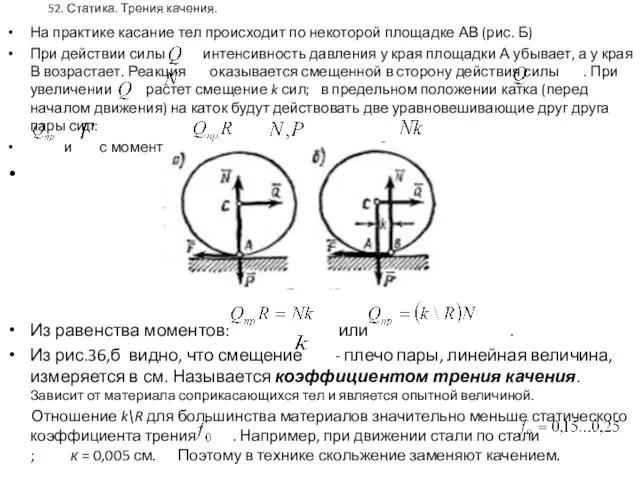
52. Статика. Трения качения.
На практике касание тел происходит по некоторой площадке
52. Статика. Трения качения.
На практике касание тел происходит по некоторой площадке
Центр тяжести
Сила тяжести – равнодействующая сил притяжения Земли, она распределена по
Центр тяжести
Сила тяжести – равнодействующая сил притяжения Земли, она распределена по
Центр тяжести
Центр тяжести
Центр тяжести
Центр тяжести
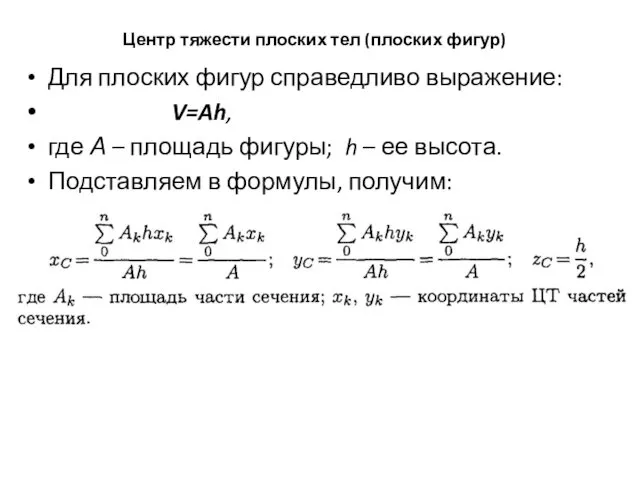
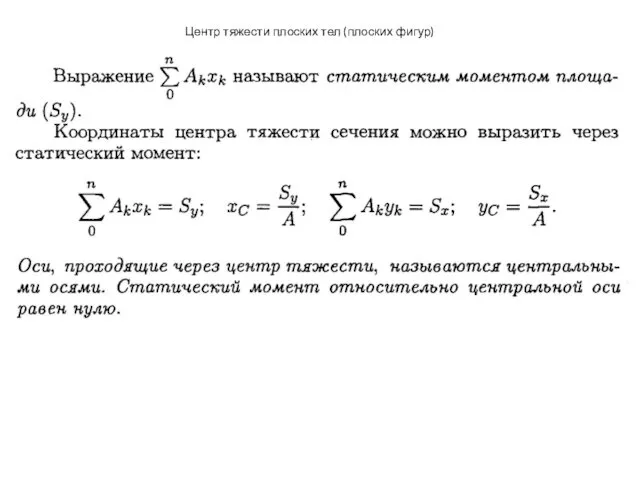
Центр тяжести плоских тел (плоских фигур)
Для плоских фигур справедливо выражение:
V=Ah,
где
Центр тяжести плоских тел (плоских фигур)
Для плоских фигур справедливо выражение:
V=Ah,
где
Центр тяжести плоских тел (плоских фигур)
Центр тяжести плоских тел (плоских фигур)
 Взаимодействие электромагнитных световых волн с веществом. Возбуждение вторичных электромагнитных волн
Взаимодействие электромагнитных световых волн с веществом. Возбуждение вторичных электромагнитных волн Работы, выполняемые на авиационной технике
Работы, выполняемые на авиационной технике Физическая игра Интеллектуальный ринг для 5- класса
Физическая игра Интеллектуальный ринг для 5- класса Тропосфера та її вплив на поширення радіохвиль
Тропосфера та її вплив на поширення радіохвиль Исследования Ломоносова, результаты которых внесли вклад в развитие учения о строении вещества и физики
Исследования Ломоносова, результаты которых внесли вклад в развитие учения о строении вещества и физики Ультразвук и инфразвук
Ультразвук и инфразвук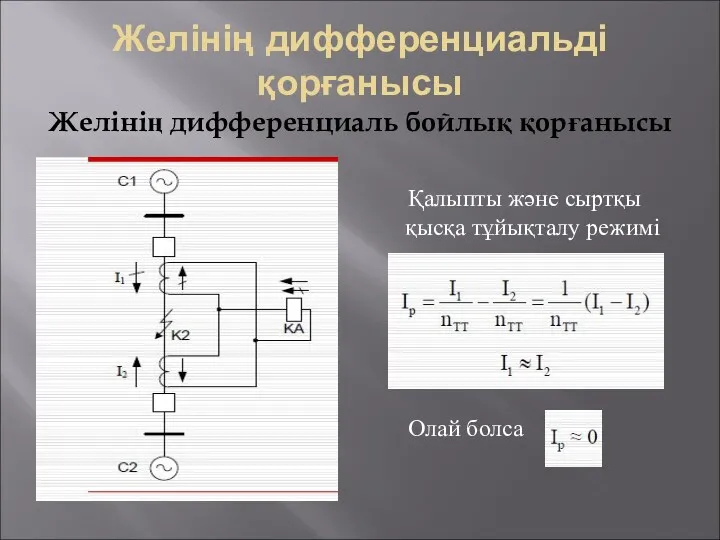 Желінің дифференциальді қорғанысы. Желінің дифференциаль бойлық қорғанысы
Желінің дифференциальді қорғанысы. Желінің дифференциаль бойлық қорғанысы Классификация методов расчета полей нейтронов и гамма-квантов. Обзор методов расчета полей нейтронов и гамма-квантов
Классификация методов расчета полей нейтронов и гамма-квантов. Обзор методов расчета полей нейтронов и гамма-квантов Физика и научный метод познания
Физика и научный метод познания Технологический процесс изготовления детали Шестерня
Технологический процесс изготовления детали Шестерня Лампы накаливания. Электронагревательные приборы
Лампы накаливания. Электронагревательные приборы Пружні деформації в тілі людини
Пружні деформації в тілі людини Исследование равноускоренного движения без начальной скорости. Лабораторная работа №1
Исследование равноускоренного движения без начальной скорости. Лабораторная работа №1 Соединения неразъемные
Соединения неразъемные Своя игра. Турнир по физике для учащихся 9 классов
Своя игра. Турнир по физике для учащихся 9 классов Вечные двигатели
Вечные двигатели Устройство сверлильного станка (технология, 5 класс)
Устройство сверлильного станка (технология, 5 класс) Датчики температуры
Датчики температуры Цепные передачи
Цепные передачи Презентации по физике
Презентации по физике Дифузія навколо нас
Дифузія навколо нас Урок в технологии критического мышления Силы в природе
Урок в технологии критического мышления Силы в природе Оптика
Оптика Рентгеновское излучение
Рентгеновское излучение Способи вивільнення ядерної енергії. 11 клас
Способи вивільнення ядерної енергії. 11 клас Шлифовальные станки. (Тема 7)
Шлифовальные станки. (Тема 7) Кванттық физика тарихы және тарихи деректерді физика пәнін оқытуда қолдану әдістемесін оқыту
Кванттық физика тарихы және тарихи деректерді физика пәнін оқытуда қолдану әдістемесін оқыту Рентгеновские лучи
Рентгеновские лучи