- Техпроцесс механообработки

Содержание
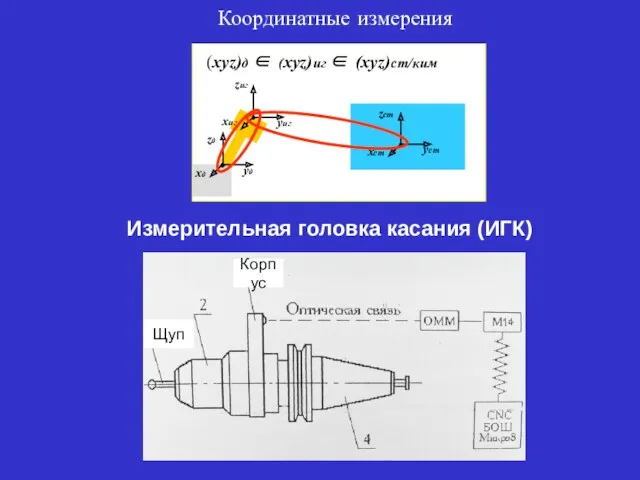
- 2. Координатные измерения хд yд zд хст yст zст хиг yиг zиг (xyz)д ∈ (xyz)иг ∈ (xyz)ст/ким
- 3. Классификация ИГК ИГК Характер измерительного касания Точечное касание Линейное касание Рабочее пространство ИГК 1D 2D 3D
- 4. ИГК с базовым щупом
- 5. Сменные щупы ИГК
- 6. ИГК с программно управляемым щупом
- 7. Применение ИГК в техпроцессе механообработки ЗАДАЧИ КООРДИНАТНЫЗ ИЗМЕРЕНИЙ Контроль базирования ПрТр в рабочей зоне станка Контроль
- 8. Стадийность размерного контроля качества в техпроцессе механообработки Промежуточный КК Входной КК Операционный КК Выходной КК Оп.
- 9. Компоновка координатно-измерительной машины (КИМ)
- 10. Метрологическое пространство КИМ
- 11. Консольная схема КИМ
- 12. Стоечная схема КИМ
- 13. Полупортальная схема КИМ
- 14. Портальная схема КИМ
- 15. Мостовая схема КИМ у х z
- 16. Модуль размерного контроля качества на базе КИМ
- 17. Координатно-измерительный робот
- 19. Скачать презентацию
Координатные измерения
хд
yд
zд
хст
yст
zст
хиг
yиг
zиг
(xyz)д ∈ (xyz)иг ∈ (xyz)ст/ким
Щуп
Измерительная головка касания (ИГК)
Корпус
Координатные измерения
хд
yд
zд
хст
yст
zст
хиг
yиг
zиг
(xyz)д ∈ (xyz)иг ∈ (xyz)ст/ким
Щуп
Измерительная головка касания (ИГК)
Корпус
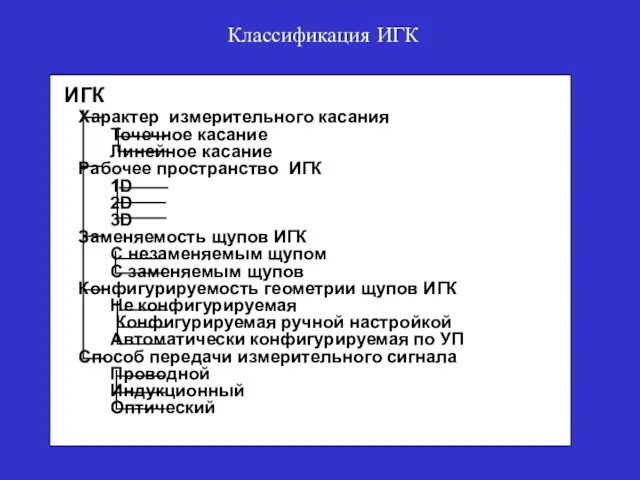
Классификация ИГК
ИГК
Характер измерительного касания
Точечное касание
Линейное касание
Рабочее пространство ИГК
1D
2D
3D
Заменяемость щупов
Классификация ИГК
ИГК
Характер измерительного касания
Точечное касание
Линейное касание
Рабочее пространство ИГК
1D
2D
3D
Заменяемость щупов

ИГК с базовым щупом
ИГК с базовым щупом
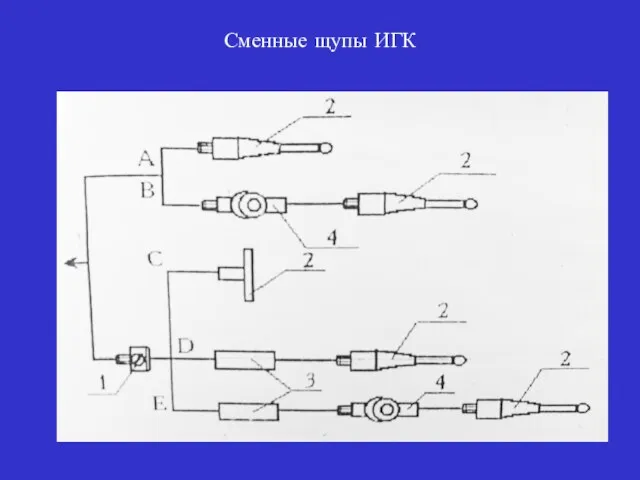
Сменные щупы ИГК
Сменные щупы ИГК
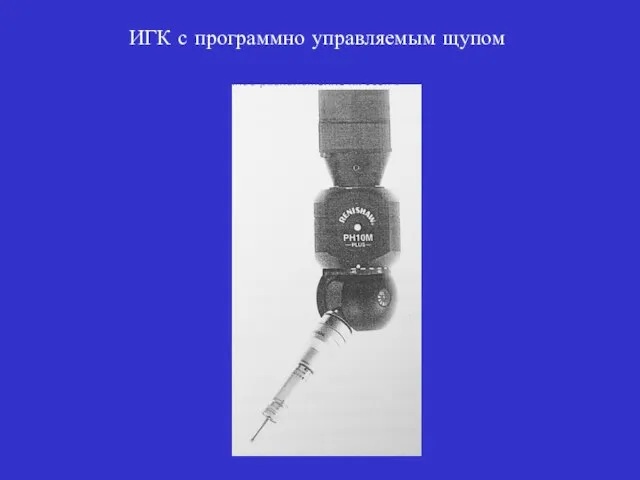
ИГК с программно управляемым щупом
ИГК с программно управляемым щупом

Применение ИГК в техпроцессе механообработки
ЗАДАЧИ КООРДИНАТНЫЗ ИЗМЕРЕНИЙ
Контроль базирования ПрТр в рабочей
Применение ИГК в техпроцессе механообработки
ЗАДАЧИ КООРДИНАТНЫЗ ИЗМЕРЕНИЙ
Контроль базирования ПрТр в рабочей
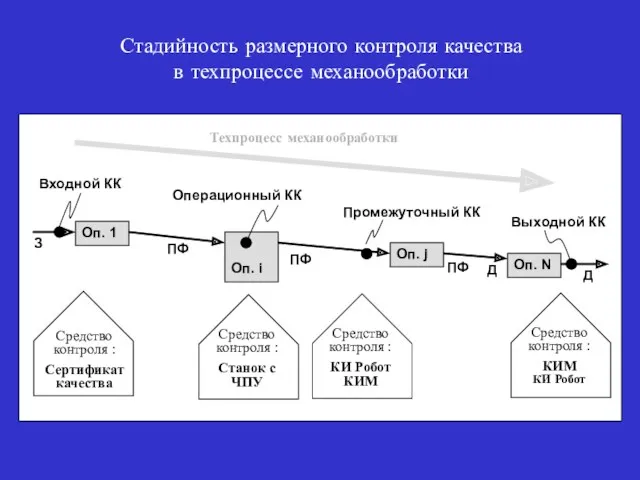
Стадийность размерного контроля качества
в техпроцессе механообработки
Промежуточный КК
Входной КК
Операционный КК
Выходной КК
Оп. 1
Оп.
Стадийность размерного контроля качества
в техпроцессе механообработки
Промежуточный КК
Входной КК
Операционный КК
Выходной КК
Оп. 1
Оп.

Компоновка координатно-измерительной машины (КИМ)
Компоновка координатно-измерительной машины (КИМ)

Метрологическое пространство КИМ
Метрологическое пространство КИМ
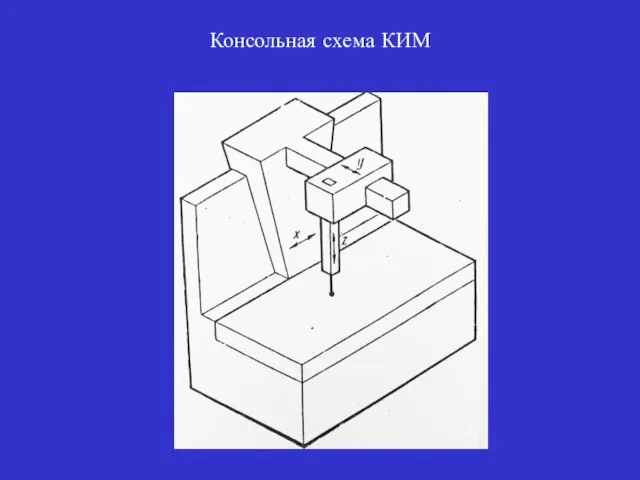
Консольная схема КИМ
Консольная схема КИМ

Стоечная схема КИМ
Стоечная схема КИМ

Полупортальная схема КИМ
Полупортальная схема КИМ

Портальная схема КИМ
Портальная схема КИМ
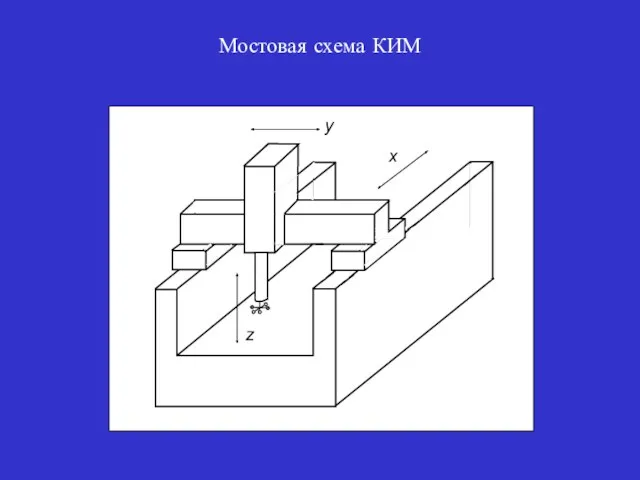
Мостовая схема КИМ
у
х
z
Мостовая схема КИМ
у
х
z

Модуль размерного контроля качества
на базе КИМ
Модуль размерного контроля качества
на базе КИМ

Координатно-измерительный робот
Координатно-измерительный робот
 Кинематика вращательного движения
Кинематика вращательного движения Тормозные системы
Тормозные системы Элементы ядерной физики
Элементы ядерной физики Методическое объединение Представь себя
Методическое объединение Представь себя Сверла по металлу
Сверла по металлу Фізичні величини. Одиниці фізичних величин. Міжнародна система одиниць
Фізичні величини. Одиниці фізичних величин. Міжнародна система одиниць Сообщающиеся сосуды в нашей жизни
Сообщающиеся сосуды в нашей жизни Спектральный анализ
Спектральный анализ Трансформатор. Устройство, предназначенное для повышения и понижения напряжения переменного тока, без потери мощности
Трансформатор. Устройство, предназначенное для повышения и понижения напряжения переменного тока, без потери мощности Реактивное движение
Реактивное движение Презентация к лекции Профессиональный стандарт учителя физики
Презентация к лекции Профессиональный стандарт учителя физики Виды движения
Виды движения Развитие творческих способностей на уроках физики.
Развитие творческих способностей на уроках физики. Історія електричної лампи ( Das Geschichte des Glübirne )
Історія електричної лампи ( Das Geschichte des Glübirne ) Молекулярная физика и электродинамика, обобщение темы
Молекулярная физика и электродинамика, обобщение темы Зубчатые передачи
Зубчатые передачи Элементы экологии в курсе физики
Элементы экологии в курсе физики Двигатели внутреннего сгорания
Двигатели внутреннего сгорания Механические свойства твердых тел
Механические свойства твердых тел Işik ve renk (7)
Işik ve renk (7) Протипожежна та аварійно-рятувальна техніка. Улаштування і технічне обслуговування агрегатів силової передачі (9)
Протипожежна та аварійно-рятувальна техніка. Улаштування і технічне обслуговування агрегатів силової передачі (9) Теорема об изменении импульса механической системы
Теорема об изменении импульса механической системы Аэрогазодинамика. Основы теории профиля и крыла (лекции 20, 21)
Аэрогазодинамика. Основы теории профиля и крыла (лекции 20, 21) Закон сохранения энергии в задачах ЕГЭ
Закон сохранения энергии в задачах ЕГЭ Работа и энергия. Закон сохранения механической энергии
Работа и энергия. Закон сохранения механической энергии Интегрированный урок физики и поэзии
Интегрированный урок физики и поэзии Задачи с космической тематикой
Задачи с космической тематикой Импульс тела. Закон сохранения импульса. 9 кл
Импульс тела. Закон сохранения импульса. 9 кл