- Теория механизмов и машин

Содержание
- 2. Машина - техническое устройство, выполняющее преобразование энергии, материалов и информации с целью облегчения физического и умственного
- 3. Механизм-это система твердых тел, предназначенная для передачи и преобразования заданного движения одного или нескольких тел в
- 4. По области применения По виду передаточной функции По виду преобразования движения По движению и расположению звеньев
- 5. Звено- одна или несколько жестко связанных между собой деталей (условно изображаются отрезками прямых, треугольниками, прямоугольниками, окружностями
- 6. Начальное звено - звено, координата которого принята за обобщенную. Кинематическая цепь – система звеньев, связанных между
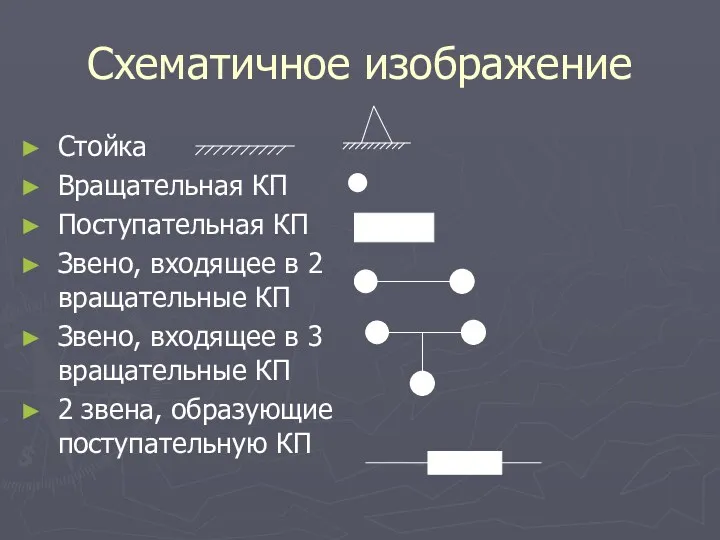
- 7. Схематичное изображение Стойка Вращательная КП Поступательная КП Звено, входящее в 2 вращательные КП Звено, входящее в
- 8. Кинематическая пара- подвижное соединение двух звеньев, допускающее их определенное относительное движение (условно изображаются согласно принятым правилам
- 9. КП классифицируются по следующим признакам: 1.По виду места контакта (места связи) поверхностей звеньев: низшие, в которых
- 10. Высшие КП- кинематические пары, в которых контакт звеньев осуществляется по линиям или точкам (пары, допускающие скольжение
- 11. Вращательных кинематических пар -5, поступательных-2 Следует подчеркнуть, что кинематическая пара это не два звена, как воспринимается
- 12. Вращательных кинематических пар -3, поступательных-0 Вращательных кинематических пар -3, поступательных-1
- 13. Вращательных кинематических пар -2, поступательных-1 Вращательных кинематических пар-4, поступательных-1
- 14. 2.По относительному движению звеньев, образующих пару: вращательные; поступательные; винтовые; плоские; сферические.
- 15. 3.По способу замыкания (обеспечения контакта звеньев пары): силовое (за счет действия сил веса или силы упругости
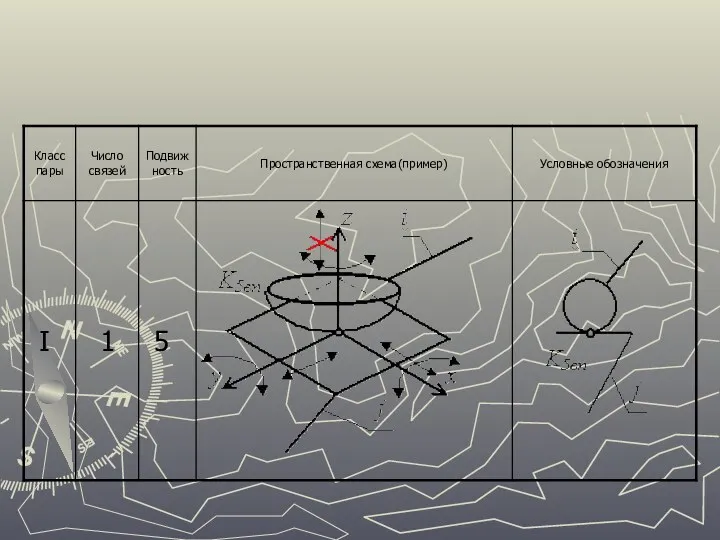
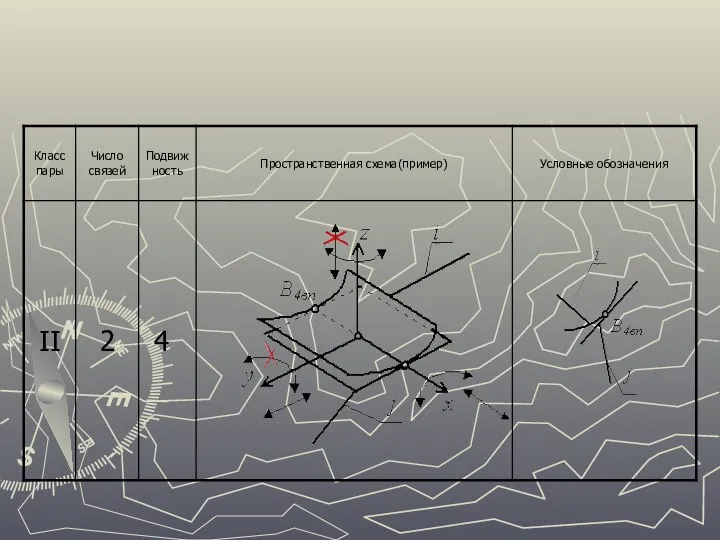
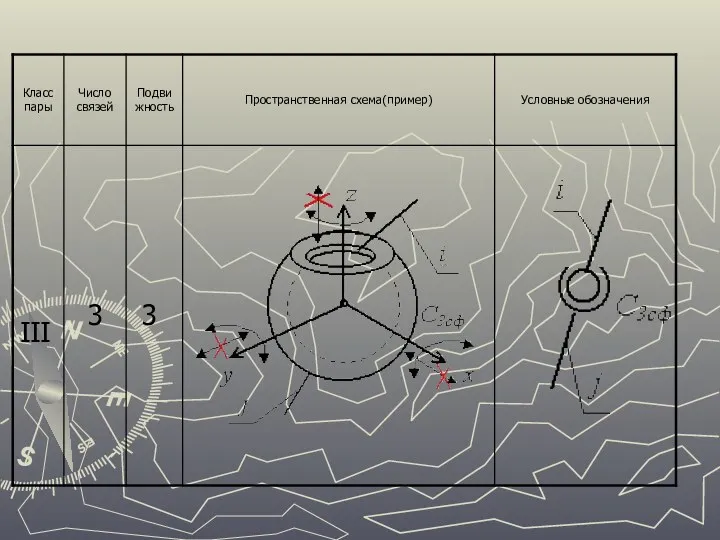
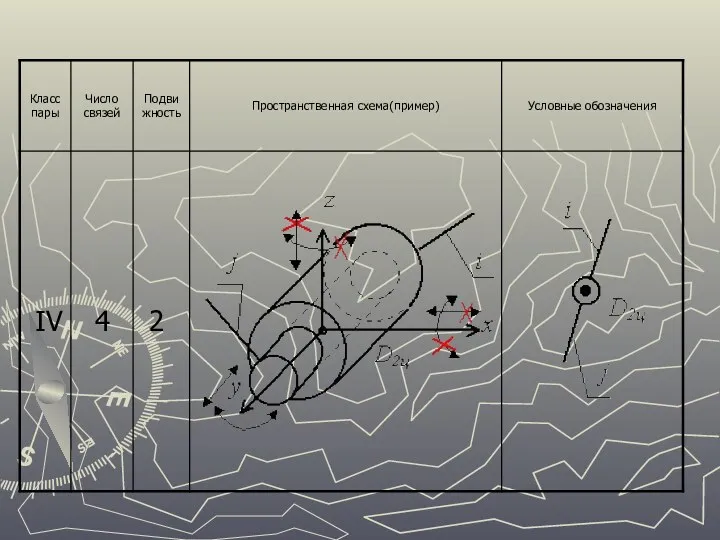
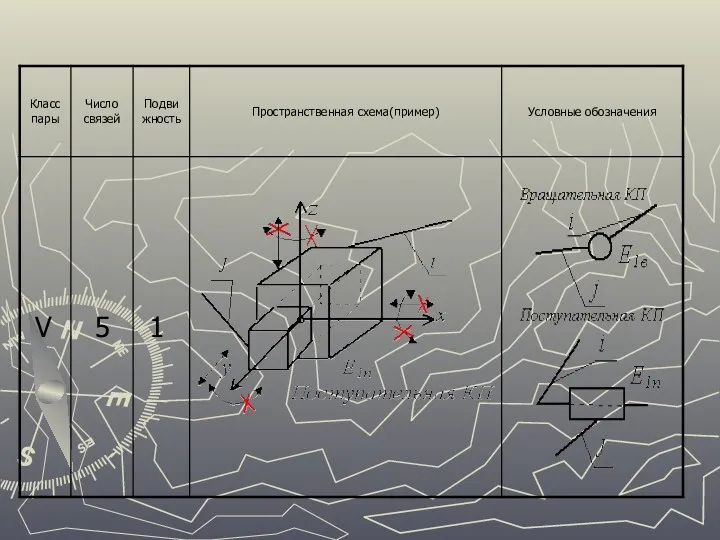
- 16. 4.По числу условий связи, накладываемых на относительное движение звеньев ( число условий связи определяет класс кинематической
- 17. 5.По числу подвижностей в относительном движении звеньев.
- 18. Любое тело, свободно движущееся в пространстве обладает 6 степенями свободы, поэтому число условий связи S=0. Если
- 24. Кинематическая цепь - это система звеньев, образующих между собой кинематические пары. Кинематическая цепь, звенья которой образуют
- 25. Структурная формула кинематической цепи Н=6k-5Р5-4Р4-3Р3-2Р2-1Р1 n=k-1 W=6n-5Р5-4Р4-3Р3-2Р2-1Р1 – формула Малышева-Сомова Если наложить на механизм 1 связь
- 26. Избыточные (пассивные) - связи в механизме, которые повторяют или дублируют связи, уже имеющиеся по данной координате,
- 27. Местные подвижности подвижности механизма, которые не оказывают влияния на его функцию положения (и передаточные функции) введены
- 28. Избыточные связи W=3(n-1)-2P5=3(5-1)-2·6=0 W=3(n-1)-2P5=3(4-1)-2·4=1 W=3(n-1)-2P5=3(3-1)-2·2-1=1 W=3(n-1)-2P5=3(4-1)-2·3-1=2 Лишние степени свободы
- 29. Замена высших КП низшими Условия: Степень подвижности должна остаться неизменной. Относительное движение звеньев должно сохраниться. (Wo+1)+(3n-2P5)=Wo
- 30. Точка касания Замены высших кинематических пар W=3n-2P5-P4=3·2-2·2-1=1 W=3n-2P5-P4=3·3-2·4-0=1 W=3n-2P5-P4=3·2-2·2-1=1 W=3n-2P5-P4=3·3-2·4-0=1 W=3n-2P5-P4=3·2-2·2-1=1 W=3n-2P5-P4=3·3-2·4-0=1
- 31. Задачи структурного анализа: 1. Определение степени подвижности 2. Выявление групп Ассура 3. Выявление механизма 1 класса
- 32. Механизм I класса Это входное звено, соединенное в КП со стойкой Имеет W=1 Если присоединить к
- 33. Группа Ассура (структурная группа)-незамкнутая кинематическая цепь с нулевой степенью подвижности. Класс группы определяется по наивысшему количеству
- 34. Класс группы Второй Третий
- 35. 1 1 1 1 2 2 2 2 1 4 2 3 4 3 2 1
- 36. Группа Ассура II класса 1 вид 2 вид 3 вид 4 вид 5 вид
- 37. Пример 1 2 3 W=3n-2P5-P4=3·3-2·4-0=1 ω А В С D I ->II1 ->II
- 38. Пример ω А В С D F E K L M N I ->III -> II1
- 39. Пример ω А В С D F E K L M N I -> II1 ->
- 40. Основные виды рычажных механизмов (механизмы, звенья которых образуют только низшие кинематические пары) Кривошипно-ползунный механизм Четырехшарнирный механизм
- 41. -Кривошип -Коромысло -Шатун -Ползун -Кулиса
- 42. Кривошипно-ползунный механизм
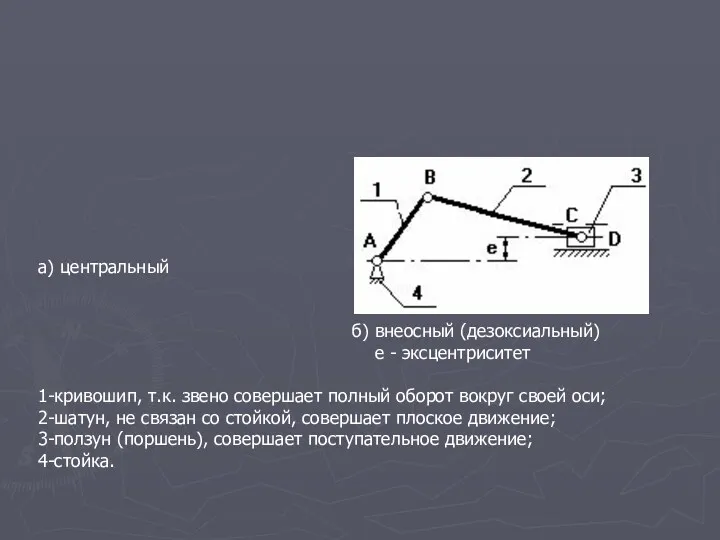
- 43. а) центральный б) внеосный (дезоксиальный) е - эксцентриситет 1-кривошип, т.к. звено совершает полный оборот вокруг своей
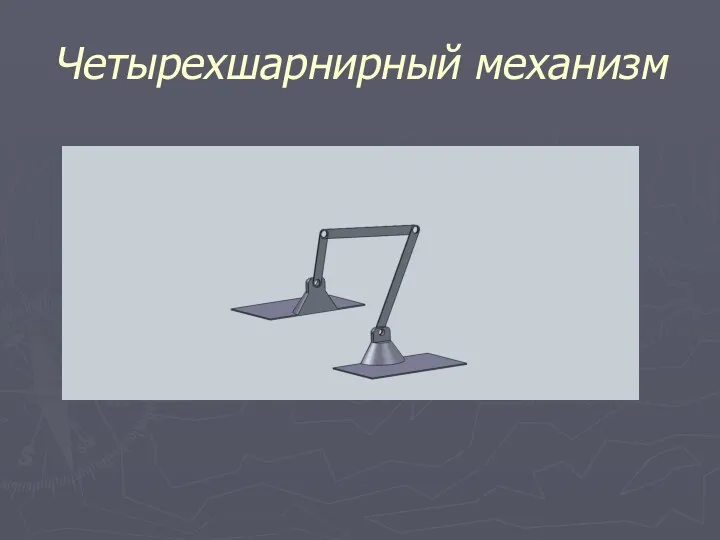
- 44. Четырехшарнирный механизм
- 45. Звенья 1,3 могут быть кривошипами. Если зв.1,3 – кривошипы, то механизм двукривошипный. Если зв.1 – кривошип
- 46. Кулисный механизм
- 47. 1 - кривошип; 2 - камень кулисы (втулка) вместе с зв.1 совершает полный оборот вокруг А
- 48. Кинематический анализ Структурная схема механизма с указанием ее размеров (кинематическая схема) Закон движения начального звена Задачи
- 49. графический метод- метод планов и метод кинематических диаграмм; аналитический метод -метод преобразования координат .
- 51. Скачать презентацию
Машина - техническое устройство, выполняющее преобразование энергии, материалов и информации с
Машина - техническое устройство, выполняющее преобразование энергии, материалов и информации с
Механизм-это
система твердых тел, предназначенная для передачи и преобразования заданного движения
Механизм-это
система твердых тел, предназначенная для передачи и преобразования заданного движения
По области применения
По виду передаточной функции
По виду преобразования движения
По движению и
По области применения
По виду передаточной функции
По виду преобразования движения
По движению и
Звено- одна или несколько жестко связанных между собой деталей (условно изображаются
Звено- одна или несколько жестко связанных между собой деталей (условно изображаются
Начальное звено - звено, координата которого принята за обобщенную.
Кинематическая цепь –
Начальное звено - звено, координата которого принята за обобщенную.
Кинематическая цепь –
Схематичное изображение
Стойка
Вращательная КП
Поступательная КП
Звено, входящее в 2 вращательные КП
Звено, входящее в
Схематичное изображение
Стойка
Вращательная КП
Поступательная КП
Звено, входящее в 2 вращательные КП
Звено, входящее в
Кинематическая пара- подвижное соединение двух звеньев, допускающее их определенное относительное движение
Кинематическая пара- подвижное соединение двух звеньев, допускающее их определенное относительное движение
КП классифицируются по следующим признакам:
1.По виду места контакта (места связи)
КП классифицируются по следующим признакам: 1.По виду места контакта (места связи)
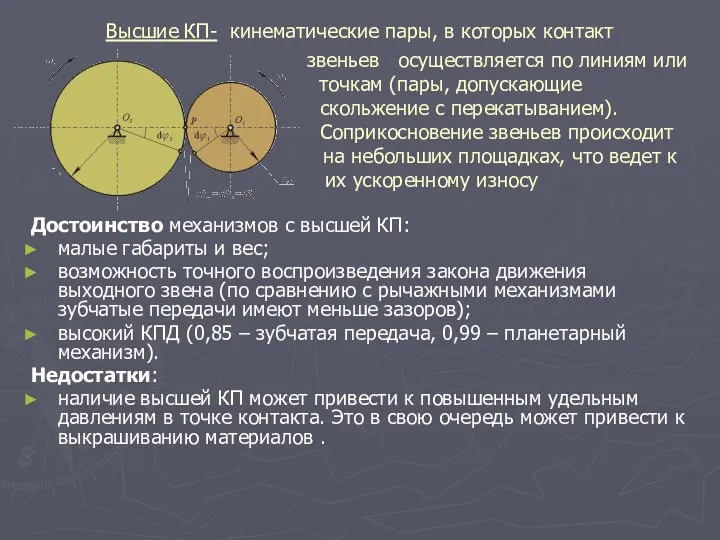
Высшие КП- кинематические пары, в которых контакт звеньев осуществляется по линиям
Высшие КП- кинематические пары, в которых контакт звеньев осуществляется по линиям
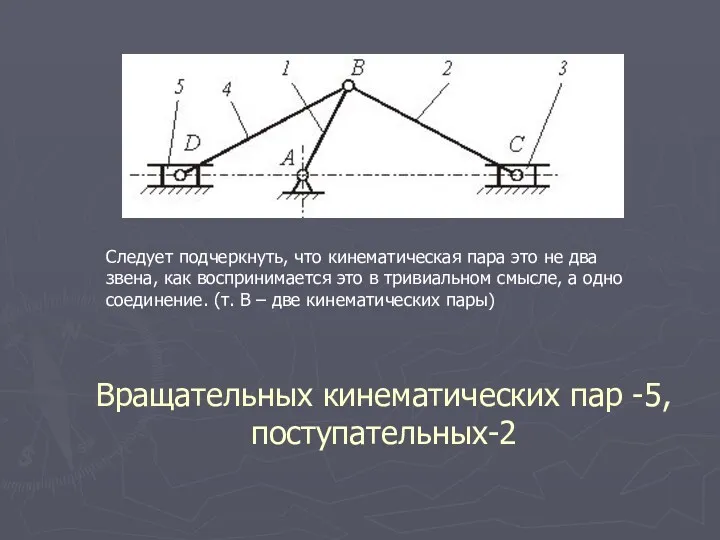
Вращательных кинематических пар -5, поступательных-2
Следует подчеркнуть, что кинематическая пара это не
Вращательных кинематических пар -5, поступательных-2
Следует подчеркнуть, что кинематическая пара это не
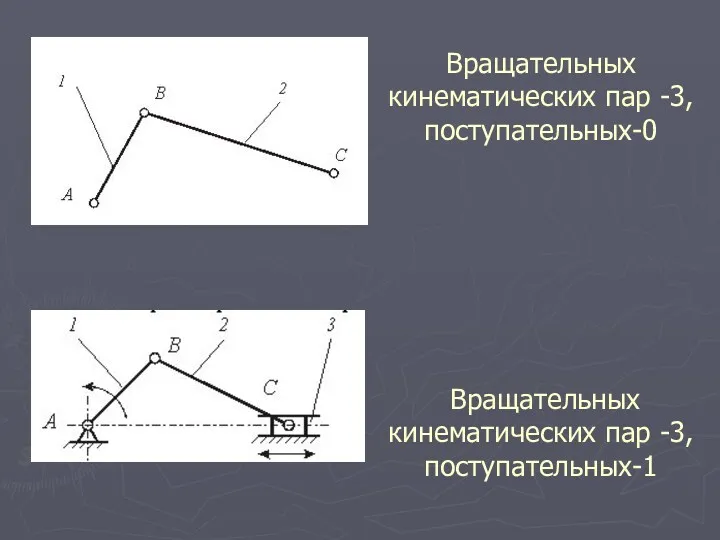
Вращательных кинематических пар -3, поступательных-0
Вращательных кинематических пар -3, поступательных-1
Вращательных кинематических пар -3, поступательных-0
Вращательных кинематических пар -3, поступательных-1
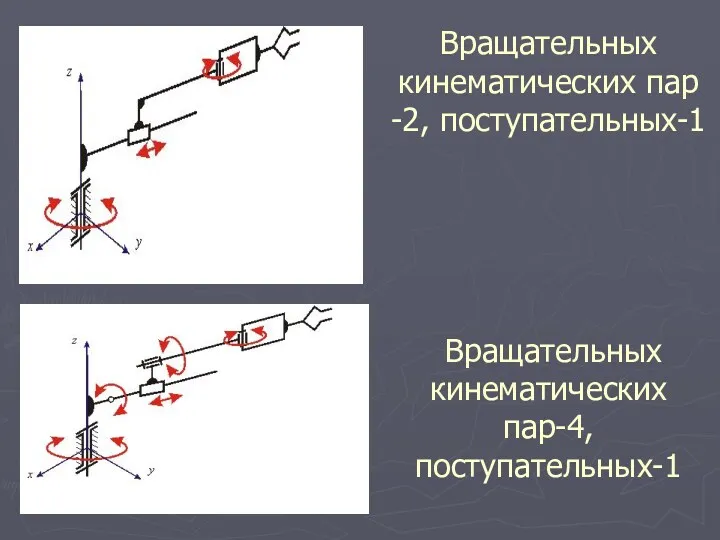
Вращательных кинематических пар -2, поступательных-1
Вращательных кинематических пар-4, поступательных-1
Вращательных кинематических пар -2, поступательных-1
Вращательных кинематических пар-4, поступательных-1
2.По относительному движению звеньев, образующих пару:
вращательные;
поступательные;
винтовые;
плоские;
сферические.
2.По относительному движению звеньев, образующих пару:
вращательные;
поступательные;
винтовые;
плоские;
сферические.

3.По способу замыкания (обеспечения контакта звеньев пары):
силовое (за счет действия сил
3.По способу замыкания (обеспечения контакта звеньев пары):
силовое (за счет действия сил
4.По числу условий связи, накладываемых на относительное движение звеньев
( число
4.По числу условий связи, накладываемых на относительное движение звеньев
( число
5.По числу подвижностей в относительном движении звеньев.
5.По числу подвижностей в относительном движении звеньев.
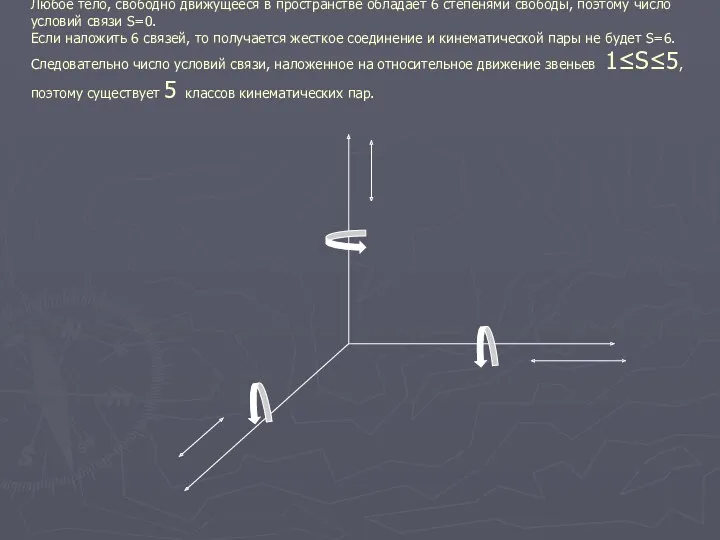
Любое тело, свободно движущееся в пространстве обладает 6 степенями свободы, поэтому
Любое тело, свободно движущееся в пространстве обладает 6 степенями свободы, поэтому
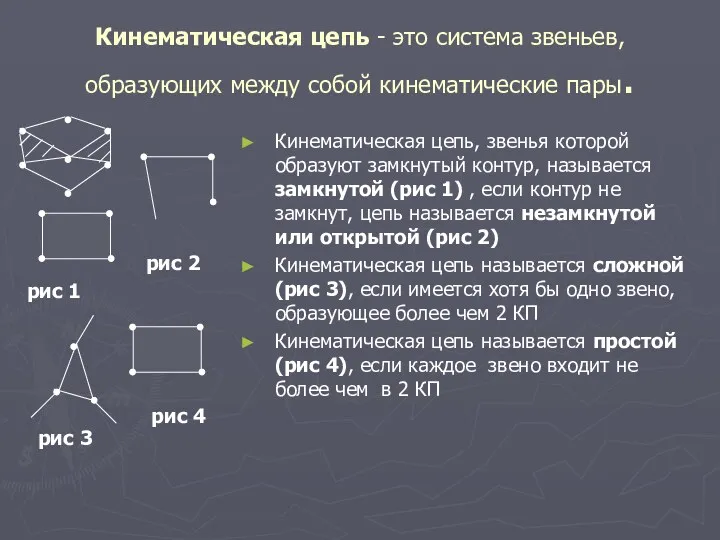
Кинематическая цепь - это система звеньев, образующих между собой кинематические пары.
Кинематическая цепь - это система звеньев, образующих между собой кинематические пары.
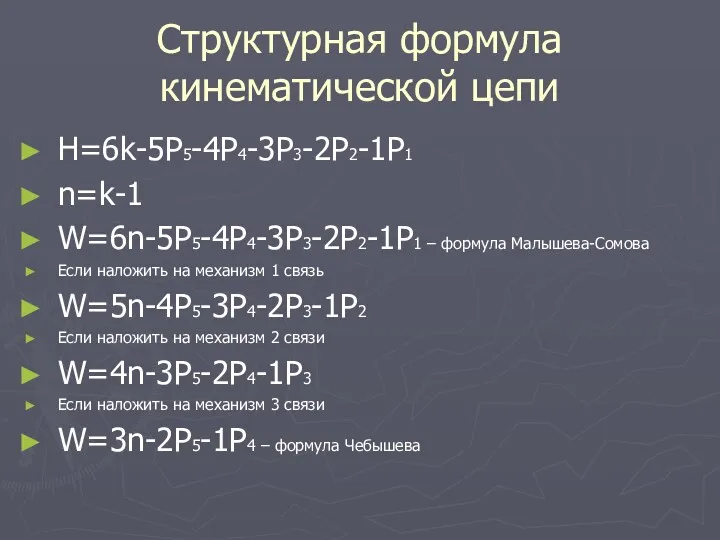
Структурная формула кинематической цепи
Н=6k-5Р5-4Р4-3Р3-2Р2-1Р1
n=k-1
W=6n-5Р5-4Р4-3Р3-2Р2-1Р1 – формула Малышева-Сомова
Если наложить на механизм 1
Структурная формула кинематической цепи
Н=6k-5Р5-4Р4-3Р3-2Р2-1Р1
n=k-1
W=6n-5Р5-4Р4-3Р3-2Р2-1Р1 – формула Малышева-Сомова
Если наложить на механизм 1
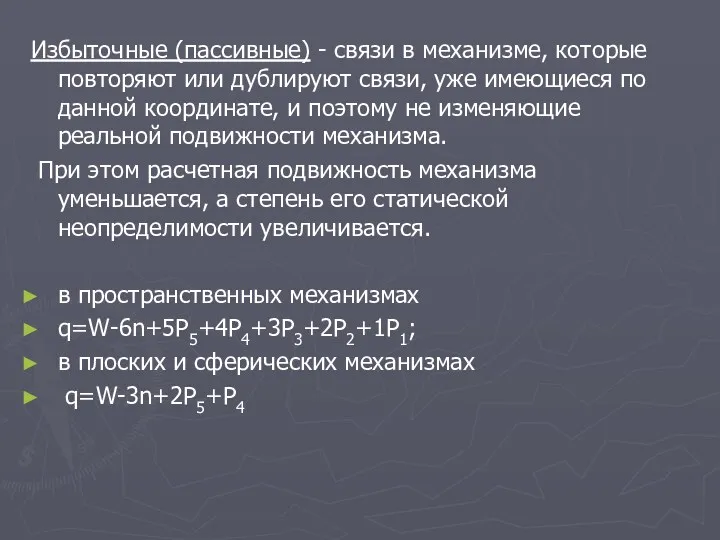
Избыточные (пассивные) - связи в механизме, которые повторяют или дублируют связи,
Избыточные (пассивные) - связи в механизме, которые повторяют или дублируют связи,
Местные подвижности
подвижности механизма, которые не оказывают влияния на его функцию положения
Местные подвижности
подвижности механизма, которые не оказывают влияния на его функцию положения

Избыточные связи
W=3(n-1)-2P5=3(5-1)-2·6=0
W=3(n-1)-2P5=3(4-1)-2·4=1
W=3(n-1)-2P5=3(3-1)-2·2-1=1
W=3(n-1)-2P5=3(4-1)-2·3-1=2
Лишние степени свободы
Избыточные связи
W=3(n-1)-2P5=3(5-1)-2·6=0
W=3(n-1)-2P5=3(4-1)-2·4=1
W=3(n-1)-2P5=3(3-1)-2·2-1=1
W=3(n-1)-2P5=3(4-1)-2·3-1=2
Лишние степени свободы
Замена высших КП низшими
Условия:
Степень подвижности должна остаться неизменной.
Относительное движение звеньев
Замена высших КП низшими
Условия:
Степень подвижности должна остаться неизменной.
Относительное движение звеньев
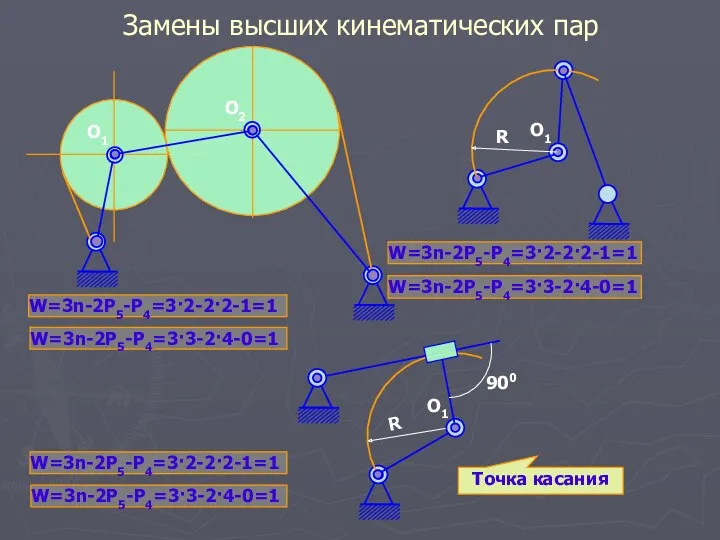
Точка касания
Замены высших кинематических пар
W=3n-2P5-P4=3·2-2·2-1=1
W=3n-2P5-P4=3·3-2·4-0=1
W=3n-2P5-P4=3·2-2·2-1=1
W=3n-2P5-P4=3·3-2·4-0=1
W=3n-2P5-P4=3·2-2·2-1=1
W=3n-2P5-P4=3·3-2·4-0=1
Точка касания
Замены высших кинематических пар
W=3n-2P5-P4=3·2-2·2-1=1
W=3n-2P5-P4=3·3-2·4-0=1
W=3n-2P5-P4=3·2-2·2-1=1
W=3n-2P5-P4=3·3-2·4-0=1
W=3n-2P5-P4=3·2-2·2-1=1
W=3n-2P5-P4=3·3-2·4-0=1
Задачи структурного анализа:
1. Определение степени подвижности
2. Выявление групп Ассура
3. Выявление механизма
Задачи структурного анализа: 1. Определение степени подвижности 2. Выявление групп Ассура 3. Выявление механизма
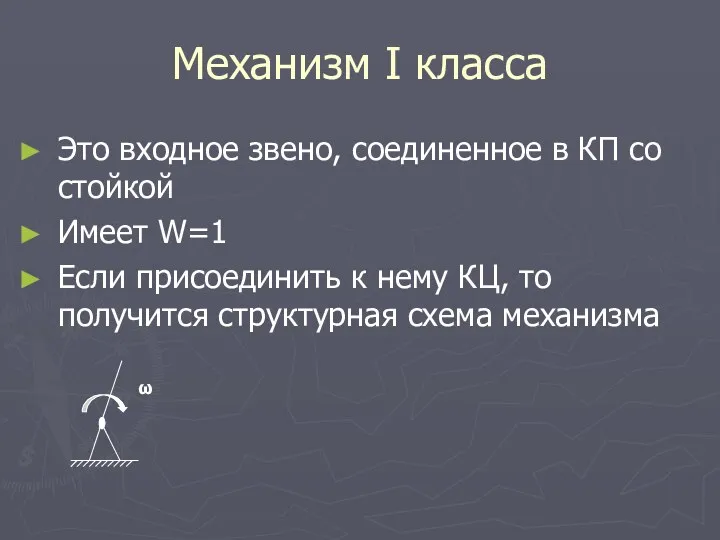
Механизм I класса
Это входное звено, соединенное в КП со стойкой
Имеет
Механизм I класса
Это входное звено, соединенное в КП со стойкой
Имеет
Группа Ассура (структурная группа)-незамкнутая кинематическая цепь с нулевой степенью подвижности.
Класс группы
Группа Ассура (структурная группа)-незамкнутая кинематическая цепь с нулевой степенью подвижности. Класс группы

Класс группы
Второй
Третий
Класс группы
Второй
Третий
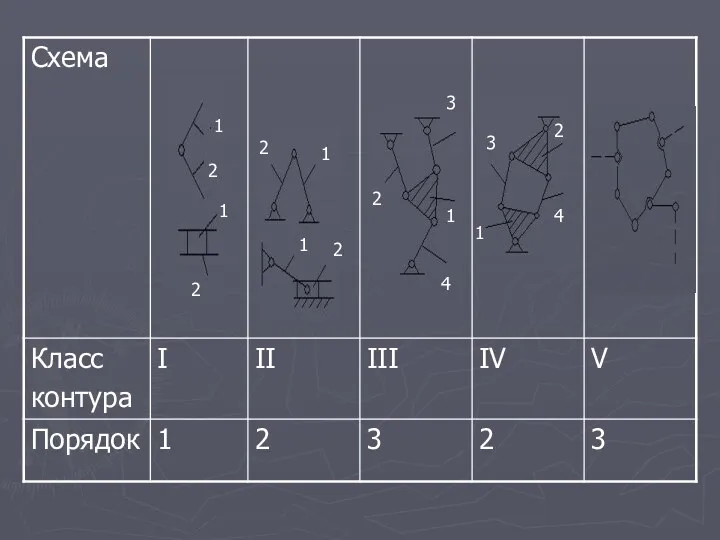
1
1
1
1
2
2
2
2
1
4
2
3
4
3
2
1
1
1
1
1
2
2
2
2
1
4
2
3
4
3
2
1

Группа Ассура II класса
1 вид
2 вид
3 вид
4 вид
5 вид
Группа Ассура II класса
1 вид
2 вид
3 вид
4 вид
5 вид

Пример
1
2
3
W=3n-2P5-P4=3·3-2·4-0=1
ω
А
В
С
D
I ->II1 ->II
Пример
1
2
3
W=3n-2P5-P4=3·3-2·4-0=1
ω
А
В
С
D
I ->II1 ->II

Пример
ω
А
В
С
D
F
E
K
L
M
N
I ->III -> II1 ->III
Пример
ω
А
В
С
D
F
E
K
L
M
N
I ->III -> II1 ->III

Пример
ω
А
В
С
D
F
E
K
L
M
N
I -> II1 -> II1 -> II1 ->II
Пример
ω
А
В
С
D
F
E
K
L
M
N
I -> II1 -> II1 -> II1 ->II
Основные виды рычажных механизмов (механизмы, звенья которых образуют только низшие кинематические
Основные виды рычажных механизмов (механизмы, звенья которых образуют только низшие кинематические
-Кривошип
-Коромысло
-Шатун
-Ползун
-Кулиса
-Кривошип
-Коромысло
-Шатун
-Ползун
-Кулиса

Кривошипно-ползунный механизм
Кривошипно-ползунный механизм
а) центральный
б) внеосный (дезоксиальный)
е - эксцентриситет
1-кривошип, т.к. звено
а) центральный
б) внеосный (дезоксиальный)
е - эксцентриситет
1-кривошип, т.к. звено
Четырехшарнирный механизм
Четырехшарнирный механизм
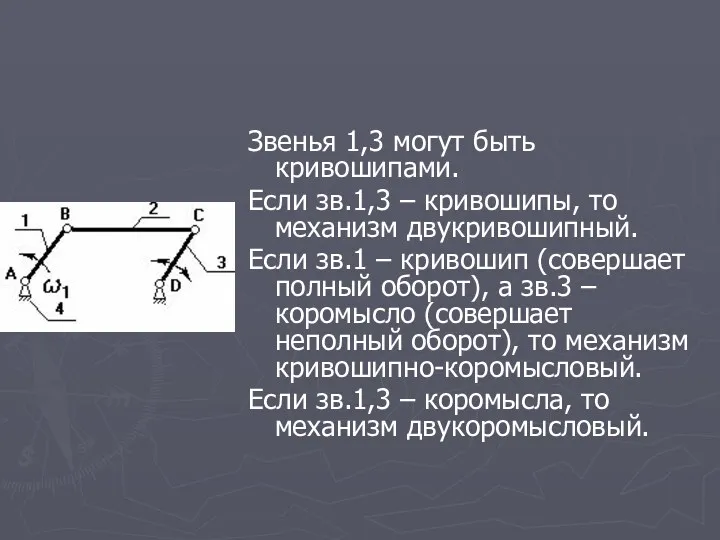
Звенья 1,3 могут быть кривошипами.
Если зв.1,3 – кривошипы, то механизм двукривошипный.
Если
Звенья 1,3 могут быть кривошипами.
Если зв.1,3 – кривошипы, то механизм двукривошипный.
Если

Кулисный механизм
Кулисный механизм
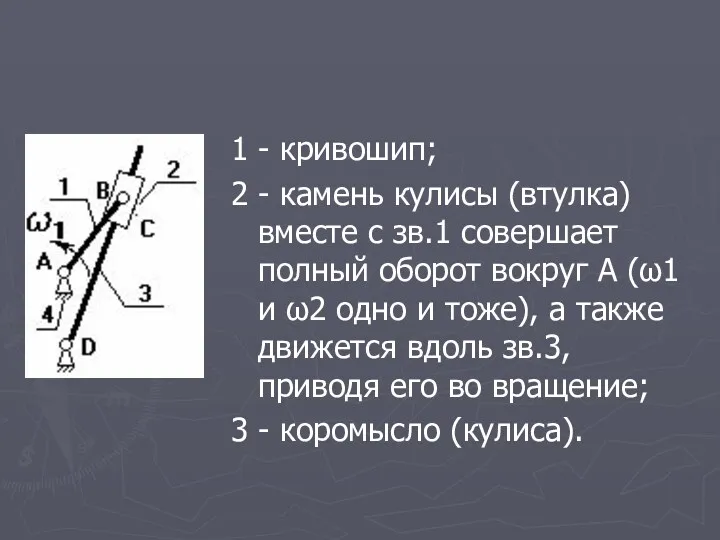
1 - кривошип;
2 - камень кулисы (втулка) вместе с зв.1 совершает
1 - кривошип;
2 - камень кулисы (втулка) вместе с зв.1 совершает
Кинематический анализ
Структурная схема механизма с указанием ее размеров (кинематическая схема)
Закон движения
Кинематический анализ
Структурная схема механизма с указанием ее размеров (кинематическая схема)
Закон движения
графический метод- метод планов и метод кинематических диаграмм;
аналитический метод -метод преобразования
графический метод- метод планов и метод кинематических диаграмм;
аналитический метод -метод преобразования
 The importance of the direct to reverberant ratio in the perception of distance, localization, clarity, and envelopment
The importance of the direct to reverberant ratio in the perception of distance, localization, clarity, and envelopment Полупроводниковые материалы. Удельное сопротивление
Полупроводниковые материалы. Удельное сопротивление Движение системы связанных тел
Движение системы связанных тел Гигиена труда с радиоактивными веществами и источниками ионизирующего излучения
Гигиена труда с радиоактивными веществами и источниками ионизирующего излучения Основные сведения о механизмах. Раздел 1
Основные сведения о механизмах. Раздел 1 Олимпиадная физика
Олимпиадная физика Градуировка спектроскопа. Определение длины волны спектральных линий
Градуировка спектроскопа. Определение длины волны спектральных линий Постоянный электрический ток
Постоянный электрический ток открытый урок-презентация на тему История Российской атомной энергетики
открытый урок-презентация на тему История Российской атомной энергетики Презентация по физике по теме Плавание тел для 7 кл.
Презентация по физике по теме Плавание тел для 7 кл. ПрезентацияСвет.Источники света.
ПрезентацияСвет.Источники света. Радиационная физика
Радиационная физика внеурочная деятельность учащихся по физике
внеурочная деятельность учащихся по физике Дифракция света на ультразвуке (акустооптическая дифракция)
Дифракция света на ультразвуке (акустооптическая дифракция) Шкала электромагнитных излучений
Шкала электромагнитных излучений презентация на тему Сообщающиеся сосуды
презентация на тему Сообщающиеся сосуды Конструирование валов
Конструирование валов Устройство и принцип действия тепловых машин
Устройство и принцип действия тепловых машин Элементы физики твердого тела
Элементы физики твердого тела Движение атмосферы
Движение атмосферы Электрические явления
Электрические явления Работа в электростатическом поле
Работа в электростатическом поле презентация Векторы.Действия над векторами.Проекция вектора
презентация Векторы.Действия над векторами.Проекция вектора Электрическое напряжение. Единицы напряжения. Вольтметр
Электрическое напряжение. Единицы напряжения. Вольтметр Презентация к уроку физики по теме: Явление электромагнитной индукции
Презентация к уроку физики по теме: Явление электромагнитной индукции Неисправности и условия при которых запрещена эксплуатация ТС
Неисправности и условия при которых запрещена эксплуатация ТС Конусные дробилки
Конусные дробилки Физика – (греч . ta physika, от physis - природа), наука о природе. (Лекция 1)
Физика – (греч . ta physika, от physis - природа), наука о природе. (Лекция 1)