- Теория механизмов и машин. Курс лекции

Содержание
- 2. *
- 3. 07.11.14. Абдюкова Р.Я.,кафедра МТМ 1.Артоболевский И.И. Теория механизмов и машин. - М.: Наука, 1988. - 632с.
- 4. * Дисциплина ТММ как и многие прикладные разделы механики возникла в начале 30-х г. Основоположниками являются
- 5. * При изучении дисциплины студенты должны знать термины, определения и обозначения различных параметров машин и механизмов,
- 6. * СТРУКТУРНЫЙ И КИНЕМАТИЧЕСКИЙ АНАЛИЗ РЫЧАЖНЫХ МЕХАНИЗМОВ.
- 7. Основные понятия и определения Структурный анализ рычажных механизмов Кинематический анализ рычажных механизмов. Метод планов скоростей. 07.11.14.
- 8. 07.11.14. Абдюкова Р.Я.,кафедра МТМ Машина – это техническая система, выполняющая механическое движение для преобразования энергии, материалов
- 9. * МАШИНА РАБОЧАЯ ЭНЕРГЕТИЧЕСКАЯ КИБЕРНЕТИЧЕСКАЯ ИНФОРМАЦИОННАЯ
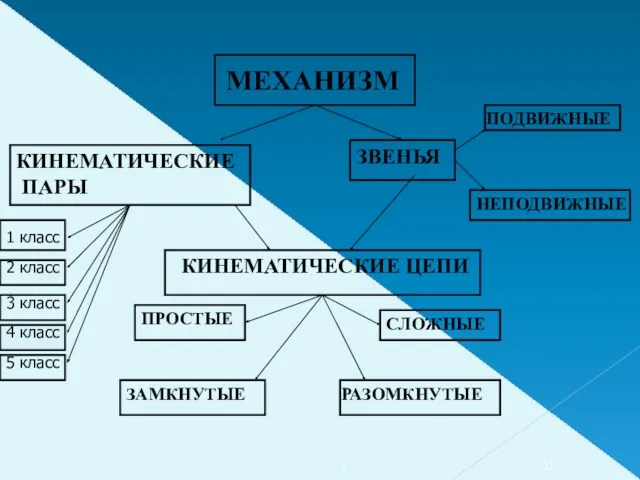
- 10. 07.11.14. Абдюкова Р.Я.,кафедра МТМ Механизм – это техническая система, состоящая из подвижных звеньев, стойки и кинематических
- 11. * МЕХАНИЗМ КИНЕМАТИЧЕСКИЕ ПАРЫ ЗВЕНЬЯ ПОДВИЖНЫЕ НЕПОДВИЖНЫЕ КИНЕМАТИЧЕСКИЕ ЦЕПИ ПРОСТЫЕ ЗАМКНУТЫЕ СЛОЖНЫЕ РАЗОМКНУТЫЕ 1 класс 2
- 12. 07.11.14. Абдюкова Р.Я.,кафедра МТМ Назначение механизмов преобразования перемещений входных звеньев и приложенных к ним силовых факторов
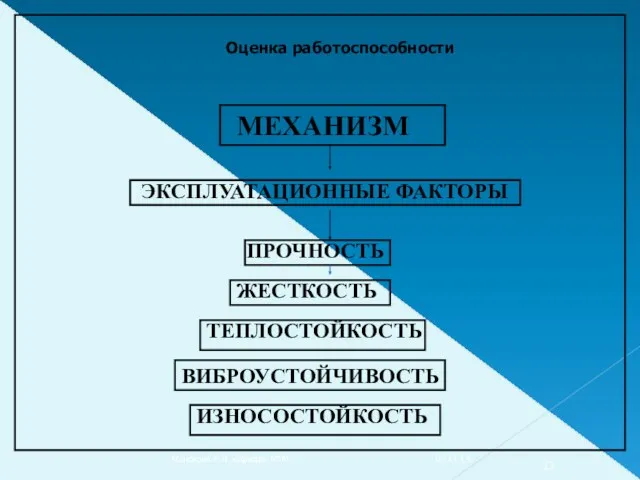
- 13. 07.11.14. Абдюкова Р.Я.,кафедра МТМ Оценка работоспособности МЕХАНИЗМ ЭКСПЛУАТАЦИОННЫЕ ФАКТОРЫ ПРОЧНОСТЬ ЖЕСТКОСТЬ ТЕПЛОСТОЙКОСТЬ ВИБРОУСТОЙЧИВОСТЬ ИЗНОСОСТОЙКОСТЬ
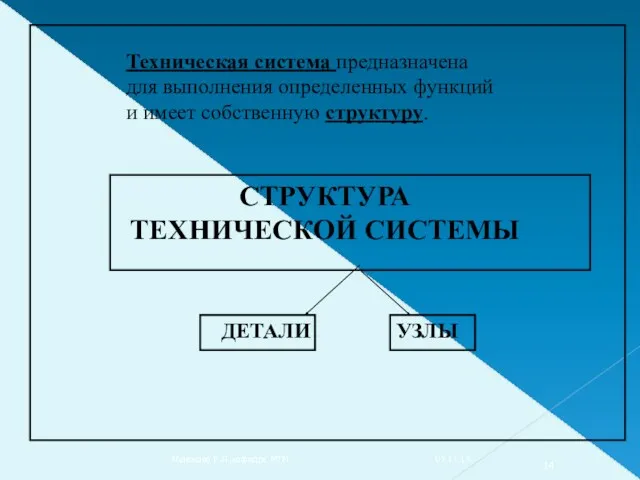
- 14. Техническая система предназначена для выполнения определенных функций и имеет собственную структуру. 07.11.14. Абдюкова Р.Я.,кафедра МТМ СТРУКТУРА
- 15. Деталь – это элемент структуры технической системы, не имеющий внутренних связей. Узел – это совокупность нескольких
- 16. Механизмы предназначены для передачи и преобразования перемещений входных звеньев и приложенных к ним силовых факторов в
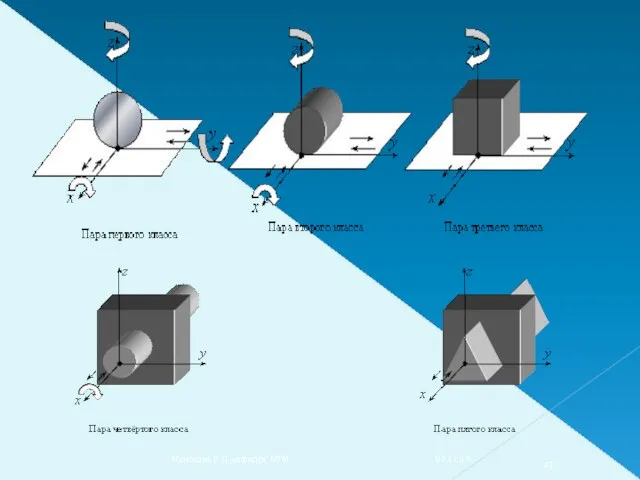
- 17. Механизмы классифицируются: 1)по числу подвижностей механизма механизмы с подвижностью равной единице (а, в, г); механизмы с
- 18. 2)по способу передачи и преобразования потока механической энергии - механизмы фрикционные (а, б, в); -механизмы с
- 19. 3)по конструктивному исполнению звеньев: -механизмы рычажные (а, б); -механизмы кулачковые (в, г); -механизмы зубчатые (д, е);
- 20. Типовой механизм – это простой механизм, имеющий при различном функциональном назначении широкое применение в машинах разных
- 21. Простые звенья - а,б,в, сложные или составные звенья – г,д. КЛАССИФИКАЦИЯ ЗВЕНЬЕВ -простое звено (одно или
- 22. по служебному назначению звенья классифицируются: -входное или ведущее звено – это звено механизма, которому сообщается заданное
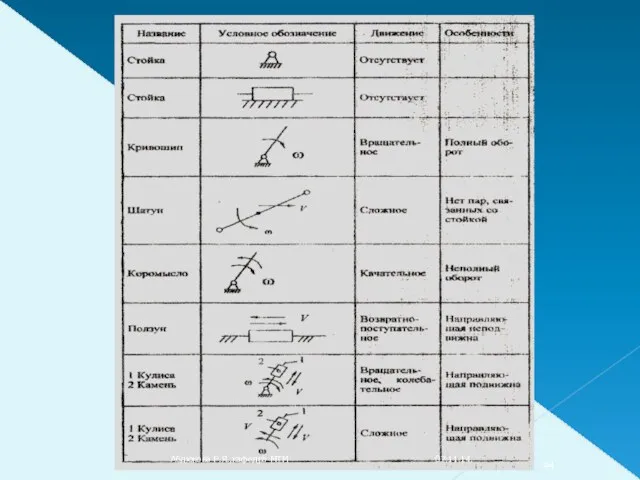
- 23. Неподвижное звено называют стойкой. За стойку принимают то звено, относительно которого изучают законы движения всех других
- 24. Две подвижно соединенные детали образуют кинематическую пару. КИНЕМАТИЧЕСКАЯ ПАРА 1. Соединение 2-х звеньев 2. Относительное движение
- 25. 1) по относительному движению звеньев: вращательные; поступательные, винтовые, плоскостные, сферические 2) по виду контакта звеньев: низшие
- 26. НИЗШИЕ КИНЕМАТИЧЕСКИЕ ПАРЫ а, б, в, г- рычажные д - клиновые е - винтовые механизмы 07.11.14.
- 27. Звено 1 Звено 2 Вращательная кинематическая пара Звено 1-корпус Звено 2- колесо В.К.П.- винт 07.11.14. Абдюкова
- 28. Поступательная кинематическая пара Звено 1 Звено 2 Звено 1- направляющие Звено 2- ползун (П.К.П.) 07.11.14. Абдюкова
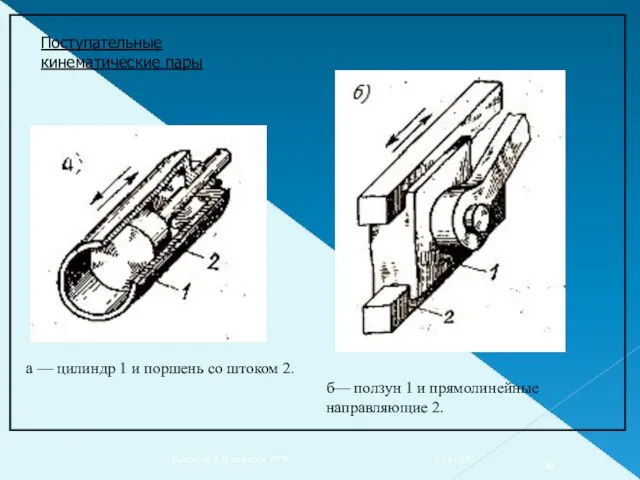
- 29. Цилиндр и поршень со штоком . 07.11.14. Абдюкова Р.Я.,кафедра МТМ Поступательная кинематическая пара
- 30. а — цилиндр 1 и поршень со штоком 2. б— ползун 1 и прямолинейные направляющие 2.
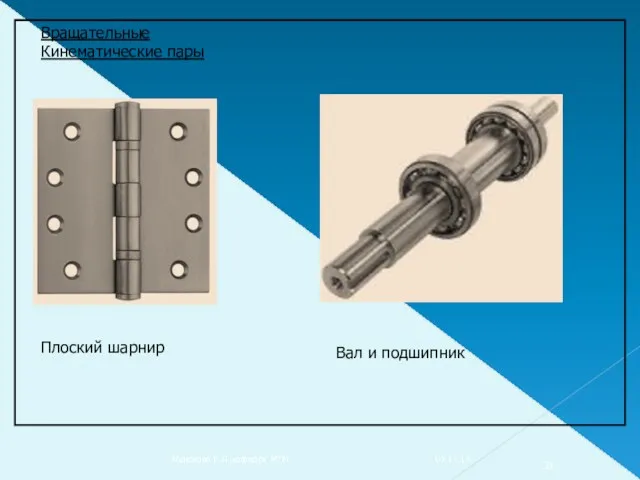
- 31. Плоский шарнир Вал и подшипник 07.11.14. Абдюкова Р.Я.,кафедра МТМ Вращательные Кинематические пары
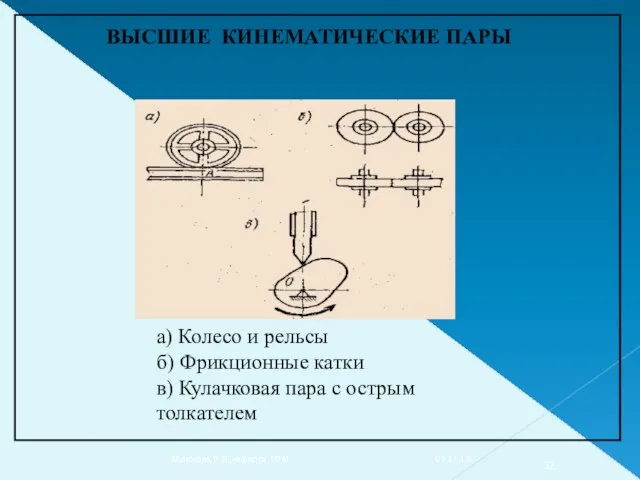
- 32. а) Колесо и рельсы б) Фрикционные катки в) Кулачковая пара с острым толкателем 07.11.14. Абдюкова Р.Я.,кафедра
- 33. Колесо и рельсы Фрикционные катки 07.11.14. Абдюкова Р.Я.,кафедра МТМ
- 34. кулачковая пара с толкателем 07.11.14. Абдюкова Р.Я.,кафедра МТМ
- 35. . 3) по способу замыкания звеньев: -силовое -геометрическое. а) б) Силовое замыкание Геометрическое замыкание 07.11.14. Абдюкова
- 36. Известно, что человечество в силу специфики своего организма воспринимает окружающий мир только в трехмерном пространстве. Следовательно,
- 37. Движения звеньев в пространстве или на плоскости ограничиваются конструктивными особенностями кинематической пары, образованной этими звеньями. Конструктивные
- 38. Для сущетствования к.п. необходимо наличие хотя бы одной связи. При S = 0 - к.п. не
- 39. H = 6 – S Н- подвижность к.п. S = 1-5 07.11.14. Абдюкова Р.Я.,кафедра МТМ
- 40. Вид контакта Пространственная схема Подвиж- ность Число связей Класс Запрещено Точка пара высшая 5 1 1
- 41. 07.11.14. Абдюкова Р.Я.,кафедра МТМ
- 42. Классификация кинематических пар
- 43. Кривошип – вращающееся звено механизма, которое совершает полный оборот вокруг оси, связанной со стойкой. Шатун –
- 44. 07.11.14. Абдюкова Р.Я.,кафедра МТМ
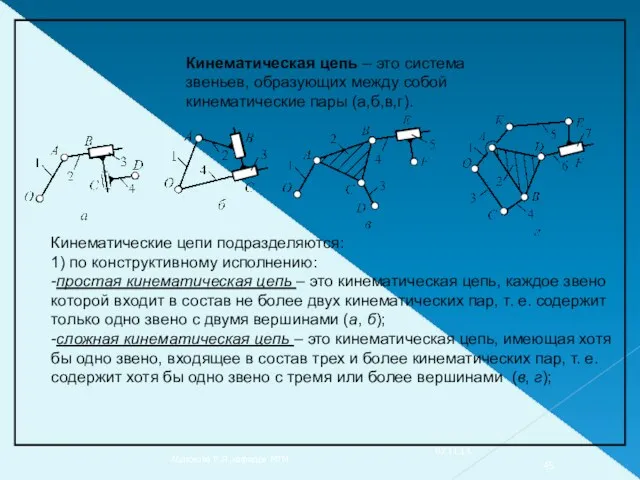
- 45. Кинематическая цепь – это система звеньев, образующих между собой кинематические пары (а,б,в,г). Кинематические цепи подразделяются: 1)
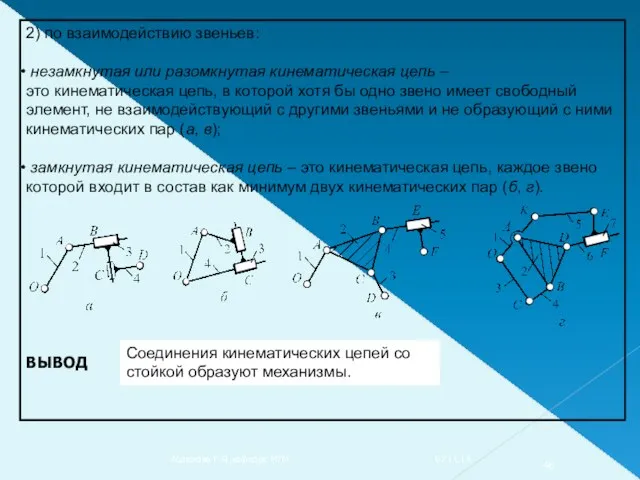
- 46. 2) по взаимодействию звеньев: незамкнутая или разомкнутая кинематическая цепь – это кинематическая цепь, в которой хотя
- 47. Изучение механизмов начинается с анализа их структуры. Структура механизма – это совокупность звеньев, образующих подвижные и
- 48. СТРУКТУРНЫЙ АНАЛИЗ РЫЧАЖНЫХ МЕХАНИЗМОВ 07.11.14. Абдюкова Р.Я.,кафедра МТМ
- 49. Назначение структурного анализа – выявления и устранения дефектов их структуры. 07.11.14. Абдюкова Р.Я.,кафедра МТМ
- 50. Задача структурного анализа 3) Определение степени подвижности механизма. Анализ структуры механизма Разложение на группы Ассура 07.11.14.
- 51. Для решения задач анализа и синтеза рычажных механизмов профессором Л. В. Ассуром была предложена структурная классификация,
- 52. Степень подвижности механизма – это число независимых обобщенных координат определяющих положения звеньев механизма на плоскости в
- 53. Структурная формула П.Л.Чебышева для плоских механизмов W = 3n- 2p5 - р4 n - число подвижных
- 54. Механизм Структурный синтез = ПМ + СГ ….+СГ. Структурный анализ 07.11.14. Абдюкова Р.Я.,кафедра МТМ
- 55. Первичный механизм (ПМ) – это элементарный механизм, состоящий из двух звеньев, одно из которых неподвижное, которые
- 56. Структурная группа звеньев (СГ) – это кинематическая цепь, образованная подвижными звеньями, подвижность которой равна нулю в
- 57. В настоящее время наибольшее распространение получили структурные группы II класса второго порядка, характерной особенностью которых является
- 58. Принцип образования плоских механизмов по Л. В. Ассура
- 59. Присоединения к первичным механизмам структурных групп II класса: а) 1 вида, б) 2 вида, в) 3
- 60. 07.11.14. Абдюкова Р.Я.,кафедра МТМ
- 61. Крайние положения механизмов 1. 2. 07.11.14. Абдюкова Р.Я.,кафедра МТМ
- 62. w w 0 1 2 3 1 2 3. 07.11.14. Абдюкова Р.Я.,кафедра МТМ
- 63. План положений глубинного насоса. Для выбора допустимых соотношений расстояний между осями шарниров, обеспечивающих работоспособность механизма при
- 64. В1 План пололжений шарнирного четырехзвенника lOA – действительная длина кривошипа, м; ⏐OA⏐ – отрезок изображающий действительную
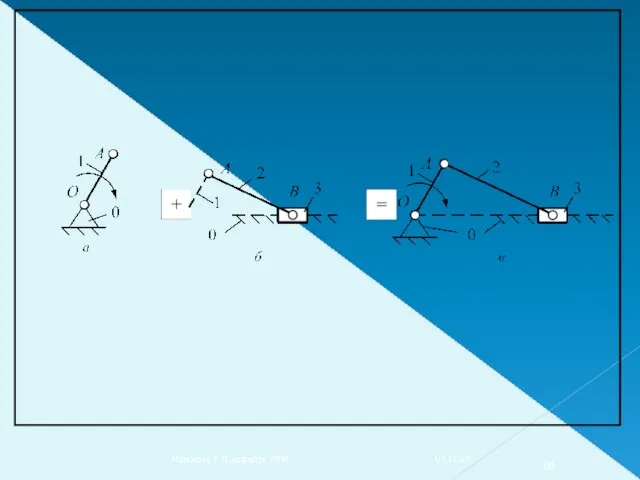
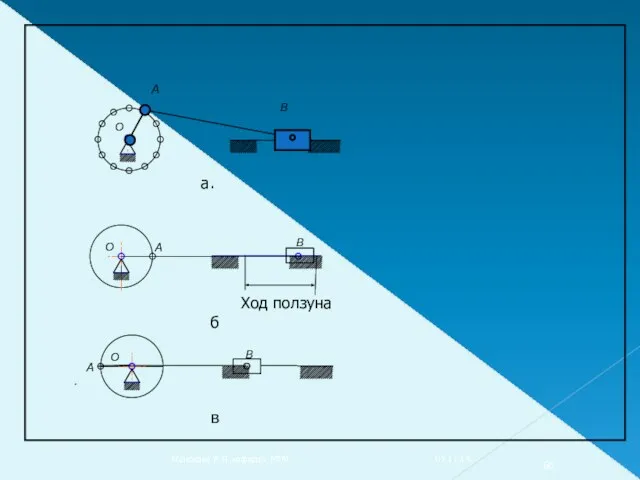
- 65. 07.11.14. Абдюкова Р.Я.,кафедра МТМ Построение кинематической схемы кривошипно-ползунного механизма Изображение кинематической схемы механизма соответствующее определенному положению
- 66. 07.11.14. Абдюкова Р.Я.,кафедра МТМ B A а. б в Ход ползуна
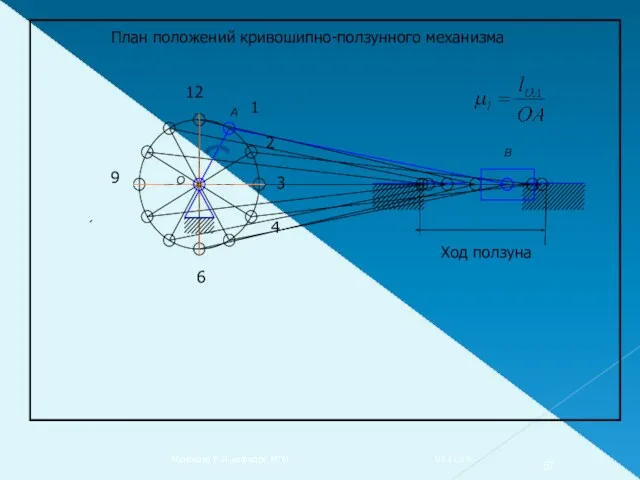
- 67. 07.11.14. Абдюкова Р.Я.,кафедра МТМ План положений кривошипно-ползунного механизма Ход ползуна 1 2 3 4 6 12
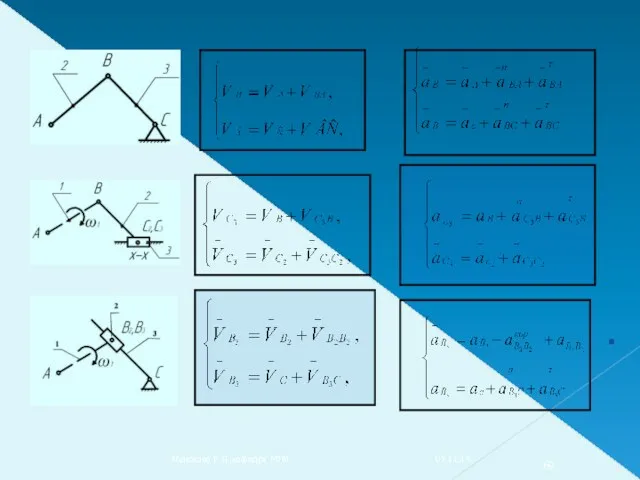
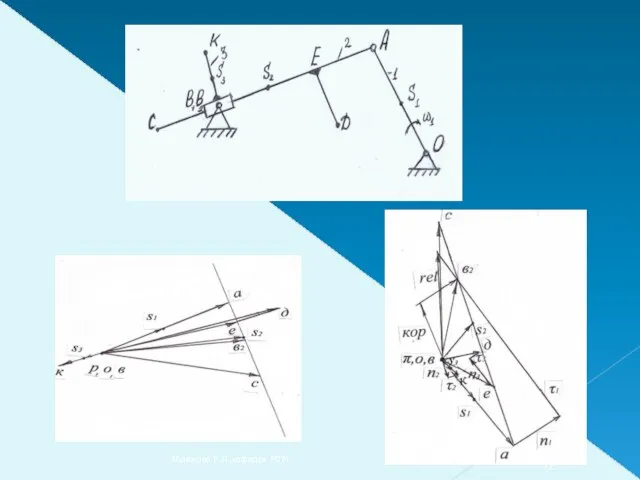
- 68. 07.11.14. Абдюкова Р.Я.,кафедра МТМ Метод планов скоростей и ускорений Основан на графическом решении векторных уравнений распределения
- 69. 07.11.14. Абдюкова Р.Я.,кафедра МТМ
- 70. Построение плана скоростей кривошипно-ползунного механизма V ВА А V V А р Р- полюс плана скоростей
- 71. 07.11.14. Абдюкова Р.Я.,кафедра МТМ Планом скоростей (ускорений) механизма называют чертеж, построенный в масштабе µа (µv), на
- 72. 07.11.14. Абдюкова Р.Я.,кафедра МТМ
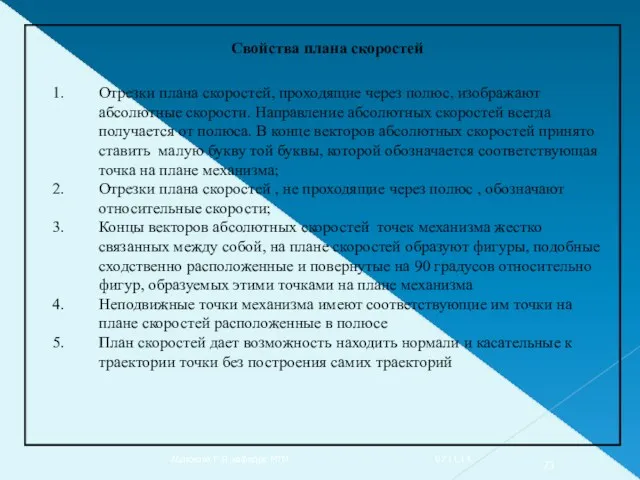
- 73. 07.11.14. Абдюкова Р.Я.,кафедра МТМ Свойства плана скоростей Отрезки плана скоростей, проходящие через полюс, изображают абсолютные скорости.
- 75. Скачать презентацию

*
*
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
1.Артоболевский И.И. Теория механизмов и машин. - М.: Наука,
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
1.Артоболевский И.И. Теория механизмов и машин. - М.: Наука,
*
Дисциплина ТММ как и многие прикладные разделы
механики возникла в
*
Дисциплина ТММ как и многие прикладные разделы
механики возникла в
*
При изучении дисциплины студенты должны знать термины,
определения и обозначения различных
*
При изучении дисциплины студенты должны знать термины,
определения и обозначения различных
*
СТРУКТУРНЫЙ
И КИНЕМАТИЧЕСКИЙ АНАЛИЗ
РЫЧАЖНЫХ МЕХАНИЗМОВ.
*
СТРУКТУРНЫЙ
И КИНЕМАТИЧЕСКИЙ АНАЛИЗ
РЫЧАЖНЫХ МЕХАНИЗМОВ.
Основные понятия и определения
Структурный анализ рычажных механизмов
Кинематический анализ рычажных механизмов.
Основные понятия и определения
Структурный анализ рычажных механизмов
Кинематический анализ рычажных механизмов.
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
Машина – это техническая система, выполняющая механическое движение для преобразования энергии,
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
Машина – это техническая система, выполняющая механическое движение для преобразования энергии,
*
МАШИНА
РАБОЧАЯ
ЭНЕРГЕТИЧЕСКАЯ
КИБЕРНЕТИЧЕСКАЯ
ИНФОРМАЦИОННАЯ
*
МАШИНА
РАБОЧАЯ
ЭНЕРГЕТИЧЕСКАЯ
КИБЕРНЕТИЧЕСКАЯ
ИНФОРМАЦИОННАЯ
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
Механизм – это техническая система, состоящая из подвижных звеньев, стойки и
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
Механизм – это техническая система, состоящая из подвижных звеньев, стойки и
*
МЕХАНИЗМ
КИНЕМАТИЧЕСКИЕ
ПАРЫ
ЗВЕНЬЯ
ПОДВИЖНЫЕ
НЕПОДВИЖНЫЕ
КИНЕМАТИЧЕСКИЕ ЦЕПИ
ПРОСТЫЕ
ЗАМКНУТЫЕ
СЛОЖНЫЕ
РАЗОМКНУТЫЕ
1 класс
2 класс
3 класс
4 класс
5 класс
*
МЕХАНИЗМ
КИНЕМАТИЧЕСКИЕ
ПАРЫ
ЗВЕНЬЯ
ПОДВИЖНЫЕ
НЕПОДВИЖНЫЕ
КИНЕМАТИЧЕСКИЕ ЦЕПИ
ПРОСТЫЕ
ЗАМКНУТЫЕ
СЛОЖНЫЕ
РАЗОМКНУТЫЕ
1 класс
2 класс
3 класс
4 класс
5 класс
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
Назначение механизмов преобразования перемещений входных звеньев и приложенных к
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
Назначение механизмов преобразования перемещений входных звеньев и приложенных к
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
Оценка работоспособности
МЕХАНИЗМ
ЭКСПЛУАТАЦИОННЫЕ ФАКТОРЫ
ПРОЧНОСТЬ
ЖЕСТКОСТЬ
ТЕПЛОСТОЙКОСТЬ
ВИБРОУСТОЙЧИВОСТЬ
ИЗНОСОСТОЙКОСТЬ
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
Оценка работоспособности
МЕХАНИЗМ
ЭКСПЛУАТАЦИОННЫЕ ФАКТОРЫ
ПРОЧНОСТЬ
ЖЕСТКОСТЬ
ТЕПЛОСТОЙКОСТЬ
ВИБРОУСТОЙЧИВОСТЬ
ИЗНОСОСТОЙКОСТЬ
Техническая система предназначена для выполнения определенных функций и имеет собственную структуру.
Техническая система предназначена для выполнения определенных функций и имеет собственную структуру.
Деталь – это элемент структуры технической системы, не имеющий внутренних связей.
Узел – это совокупность нескольких
Деталь – это элемент структуры технической системы, не имеющий внутренних связей.
Узел – это совокупность нескольких
Механизмы предназначены для передачи и преобразования перемещений входных звеньев и приложенных
Механизмы предназначены для передачи и преобразования перемещений входных звеньев и приложенных
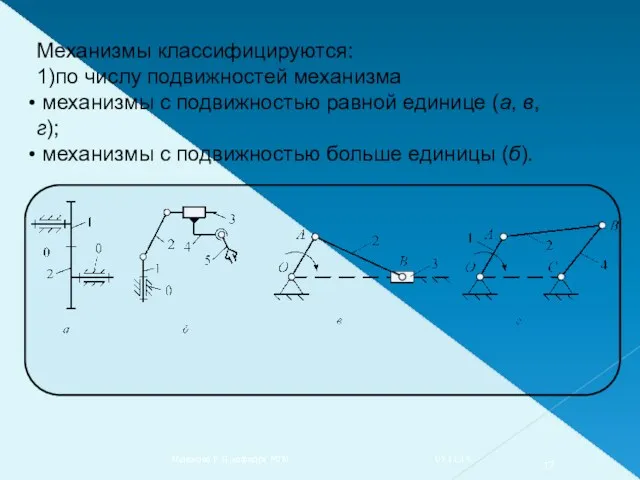
Механизмы классифицируются:
1)по числу подвижностей механизма
механизмы с подвижностью равной единице
Механизмы классифицируются:
1)по числу подвижностей механизма
механизмы с подвижностью равной единице
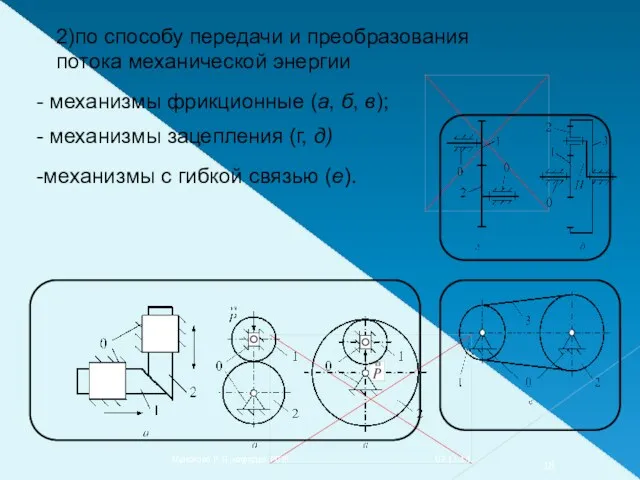
2)по способу передачи и преобразования потока механической энергии
- механизмы фрикционные (а,
2)по способу передачи и преобразования потока механической энергии
- механизмы фрикционные (а,

3)по конструктивному исполнению звеньев:
-механизмы рычажные (а, б);
-механизмы кулачковые (в, г);
3)по конструктивному исполнению звеньев:
-механизмы рычажные (а, б);
-механизмы кулачковые (в, г);
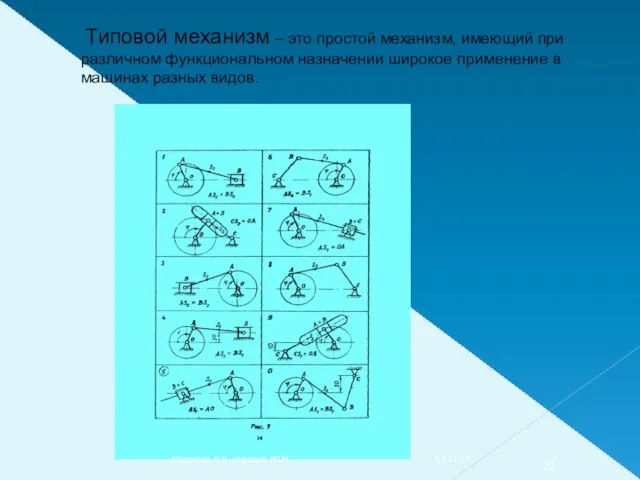
Типовой механизм – это простой механизм, имеющий при различном функциональном назначении широкое
Типовой механизм – это простой механизм, имеющий при различном функциональном назначении широкое

Простые звенья - а,б,в, сложные или составные звенья – г,д.
КЛАССИФИКАЦИЯ ЗВЕНЬЕВ
-простое
Простые звенья - а,б,в, сложные или составные звенья – г,д.
КЛАССИФИКАЦИЯ ЗВЕНЬЕВ
-простое
по служебному назначению звенья классифицируются:
-входное или ведущее звено – это звено механизма,
по служебному назначению звенья классифицируются:
-входное или ведущее звено – это звено механизма,
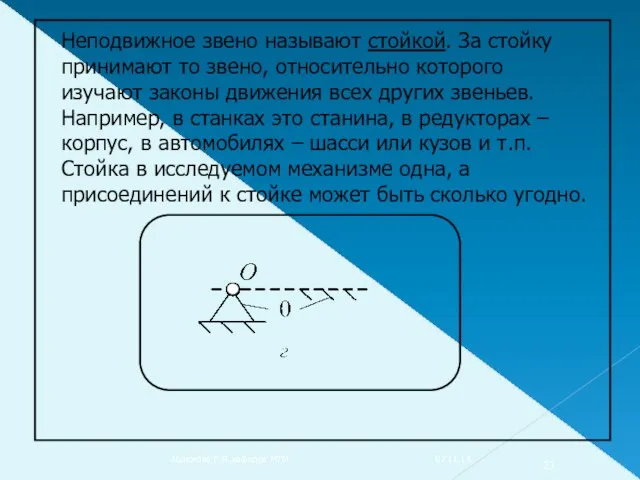
Неподвижное звено называют стойкой. За стойку принимают то звено, относительно которого
Неподвижное звено называют стойкой. За стойку принимают то звено, относительно которого
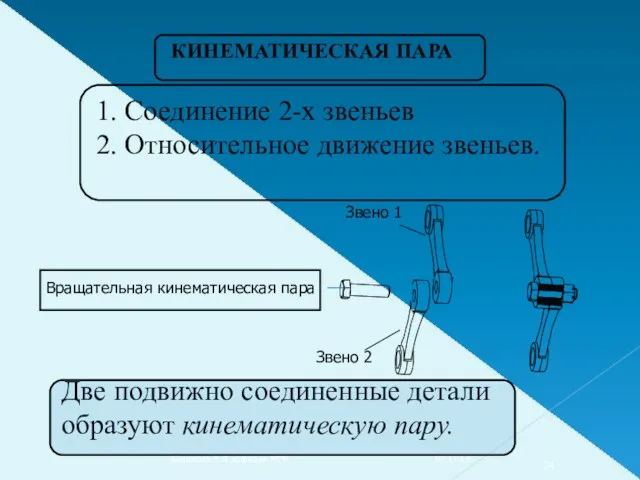
Две подвижно соединенные детали образуют кинематическую пару.
КИНЕМАТИЧЕСКАЯ ПАРА
1. Соединение 2-х
Две подвижно соединенные детали образуют кинематическую пару.
КИНЕМАТИЧЕСКАЯ ПАРА
1. Соединение 2-х
1) по относительному движению звеньев: вращательные; поступательные, винтовые, плоскостные, сферические
2) по виду контакта
1) по относительному движению звеньев: вращательные; поступательные, винтовые, плоскостные, сферические
2) по виду контакта
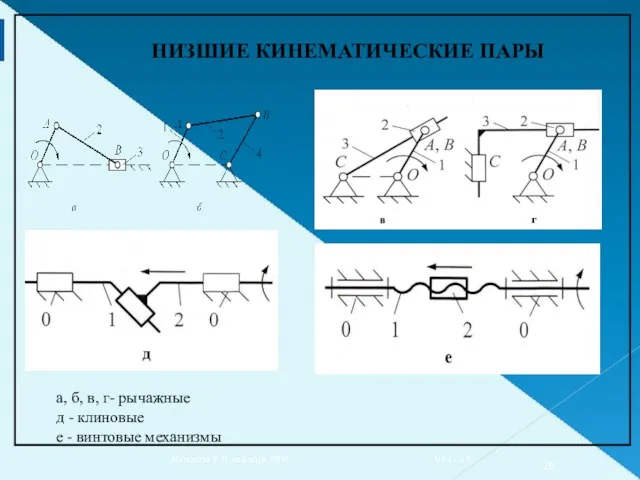
НИЗШИЕ КИНЕМАТИЧЕСКИЕ ПАРЫ
а, б, в, г- рычажные
д - клиновые
е -
НИЗШИЕ КИНЕМАТИЧЕСКИЕ ПАРЫ
а, б, в, г- рычажные
д - клиновые
е -
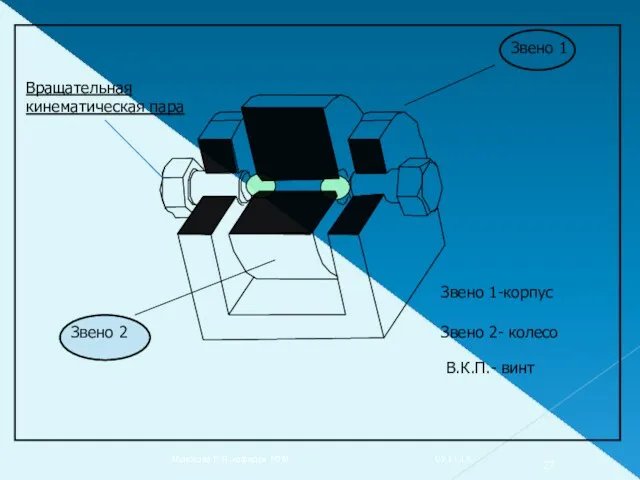
Звено 1
Звено 2
Вращательная
кинематическая пара
Звено 1-корпус
Звено 2- колесо
В.К.П.- винт
07.11.14.
Абдюкова
Звено 1
Звено 2
Вращательная
кинематическая пара
Звено 1-корпус
Звено 2- колесо
В.К.П.- винт
07.11.14.
Абдюкова
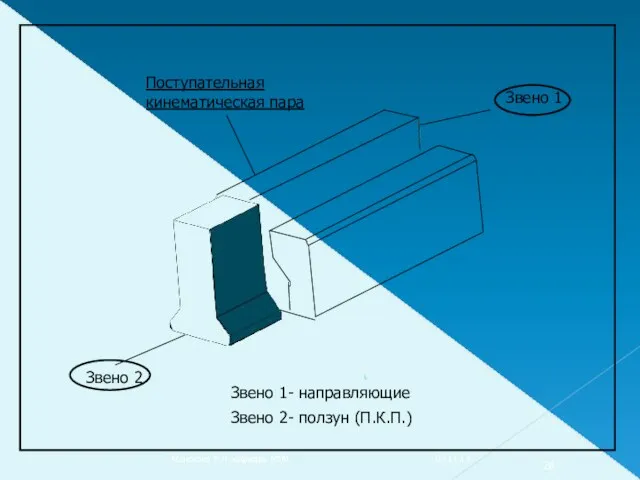
Поступательная
кинематическая пара
Звено 1
Звено 2
Звено 1- направляющие
Звено 2- ползун (П.К.П.)
07.11.14.
Абдюкова Р.Я.,кафедра
Поступательная
кинематическая пара
Звено 1
Звено 2
Звено 1- направляющие
Звено 2- ползун (П.К.П.)
07.11.14.
Абдюкова Р.Я.,кафедра

Цилиндр и поршень со штоком .
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
Поступательная кинематическая пара
Цилиндр и поршень со штоком .
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
Поступательная кинематическая пара
а — цилиндр 1 и поршень со штоком 2.
б— ползун
а — цилиндр 1 и поршень со штоком 2.
б— ползун
Плоский шарнир
Вал и подшипник
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
Вращательные
Кинематические пары
Плоский шарнир
Вал и подшипник
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
Вращательные
Кинематические пары
а) Колесо и рельсы
б) Фрикционные катки
в) Кулачковая пара
а) Колесо и рельсы
б) Фрикционные катки
в) Кулачковая пара

Колесо и рельсы
Фрикционные катки
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
Колесо и рельсы
Фрикционные катки
07.11.14.
Абдюкова Р.Я.,кафедра МТМ

кулачковая пара с толкателем
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
кулачковая пара с толкателем
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
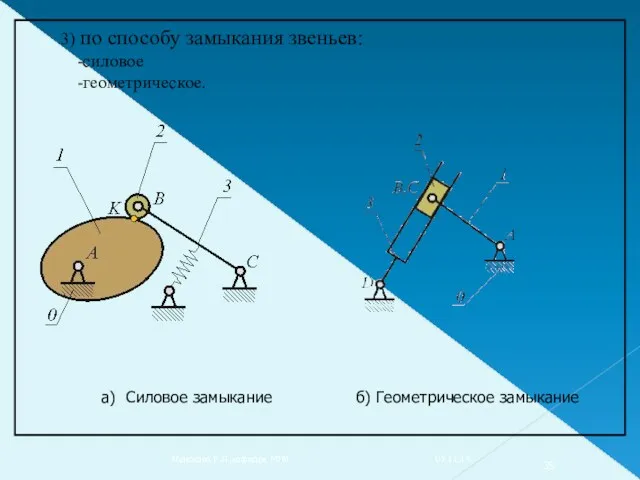
. 3) по способу замыкания звеньев:
-силовое
-геометрическое.
а)
б)
Силовое замыкание
Геометрическое
. 3) по способу замыкания звеньев:
-силовое
-геометрическое.
а)
б)
Силовое замыкание
Геометрическое
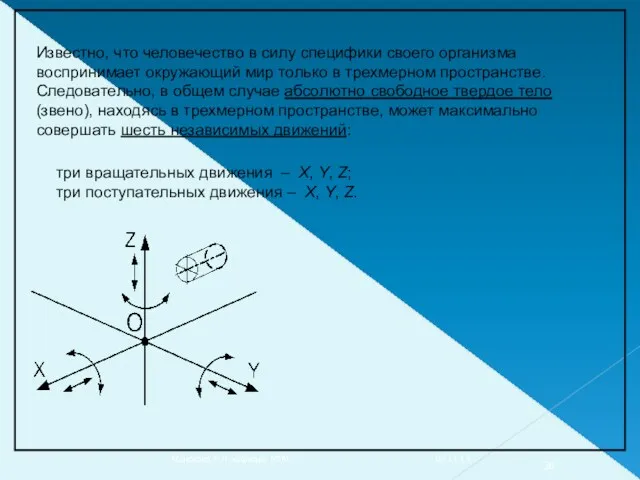
Известно, что человечество в силу специфики своего организма воспринимает окружающий мир
Известно, что человечество в силу специфики своего организма воспринимает окружающий мир
Движения звеньев в пространстве или на плоскости ограничиваются конструктивными особенностями
Движения звеньев в пространстве или на плоскости ограничиваются конструктивными особенностями
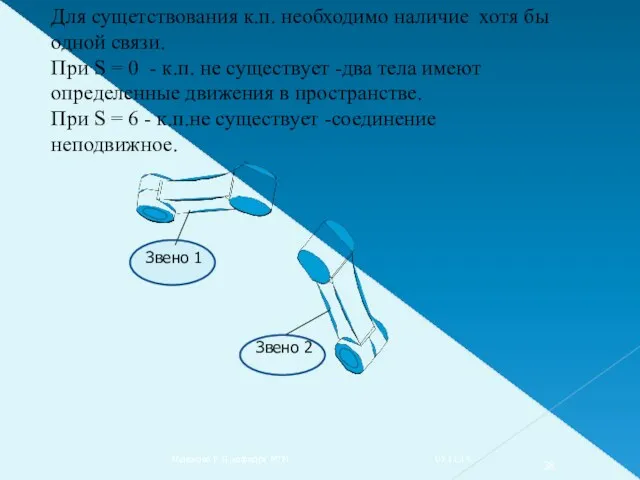
Для сущетствования к.п. необходимо наличие хотя бы одной связи.
При S =
Для сущетствования к.п. необходимо наличие хотя бы одной связи.
При S =
H = 6 – S
Н- подвижность к.п.
S = 1-5
07.11.14.
Абдюкова Р.Я.,кафедра
H = 6 – S
Н- подвижность к.п.
S = 1-5
07.11.14.
Абдюкова Р.Я.,кафедра
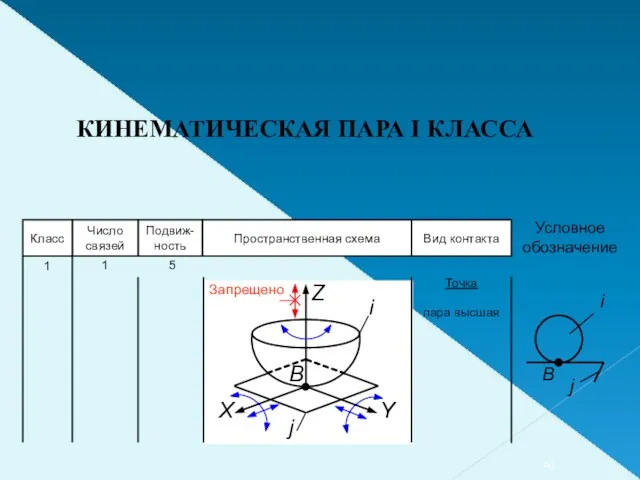
Вид контакта
Пространственная схема
Подвиж-
ность
Число связей
Класс
Запрещено
Точка
пара высшая
5
1
1
Условное обозначение
КИНЕМАТИЧЕСКАЯ ПАРА I КЛАССА
Вид контакта
Пространственная схема
Подвиж-
ность
Число связей
Класс
Запрещено
Точка
пара высшая
5
1
1
Условное обозначение
КИНЕМАТИЧЕСКАЯ ПАРА I КЛАССА
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
Абдюкова Р.Я.,кафедра МТМ

Классификация кинематических пар
Классификация кинематических пар
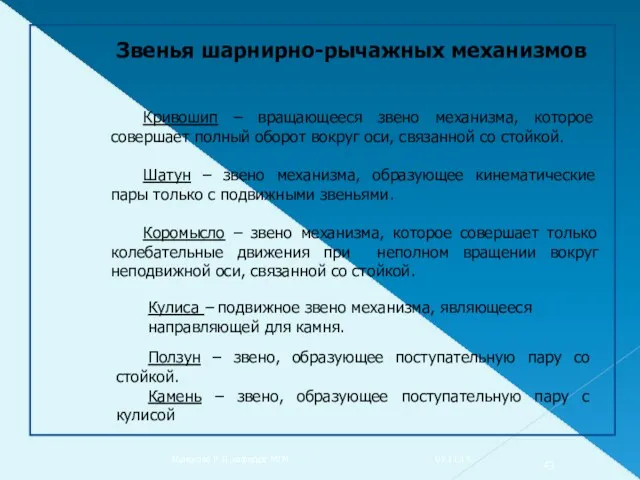
Кривошип – вращающееся звено механизма, которое совершает полный оборот вокруг оси,
Кривошип – вращающееся звено механизма, которое совершает полный оборот вокруг оси,
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
Кинематическая цепь – это система звеньев, образующих между собой кинематические пары (а,б,в,г).
Кинематические
Кинематическая цепь – это система звеньев, образующих между собой кинематические пары (а,б,в,г).
Кинематические
2) по взаимодействию звеньев:
незамкнутая или разомкнутая кинематическая цепь –
это кинематическая
2) по взаимодействию звеньев:
незамкнутая или разомкнутая кинематическая цепь –
это кинематическая
Изучение механизмов начинается с анализа их структуры.
Структура механизма – это совокупность
Изучение механизмов начинается с анализа их структуры.
Структура механизма – это совокупность
СТРУКТУРНЫЙ
АНАЛИЗ РЫЧАЖНЫХ МЕХАНИЗМОВ
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
СТРУКТУРНЫЙ
АНАЛИЗ РЫЧАЖНЫХ МЕХАНИЗМОВ
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
Назначение структурного анализа –
выявления и устранения дефектов
их структуры.
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
Назначение структурного анализа –
выявления и устранения дефектов
их структуры.
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
Задача структурного анализа
3) Определение степени подвижности механизма.
Анализ структуры механизма
Разложение на
Задача структурного анализа
3) Определение степени подвижности механизма.
Анализ структуры механизма
Разложение на
Для решения задач анализа и синтеза рычажных механизмов профессором Л. В.
Для решения задач анализа и синтеза рычажных механизмов профессором Л. В.
Степень подвижности механизма – это число независимых обобщенных координат определяющих положения звеньев механизма
Степень подвижности механизма – это число независимых обобщенных координат определяющих положения звеньев механизма
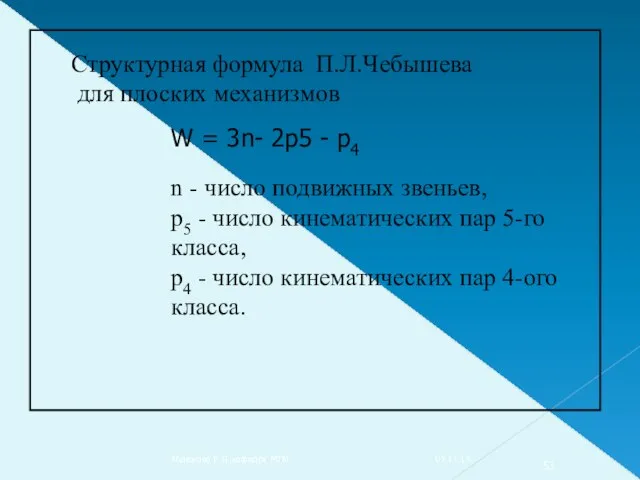
Структурная формула П.Л.Чебышева
для плоских механизмов
W = 3n- 2p5 - р4
Структурная формула П.Л.Чебышева
для плоских механизмов
W = 3n- 2p5 - р4
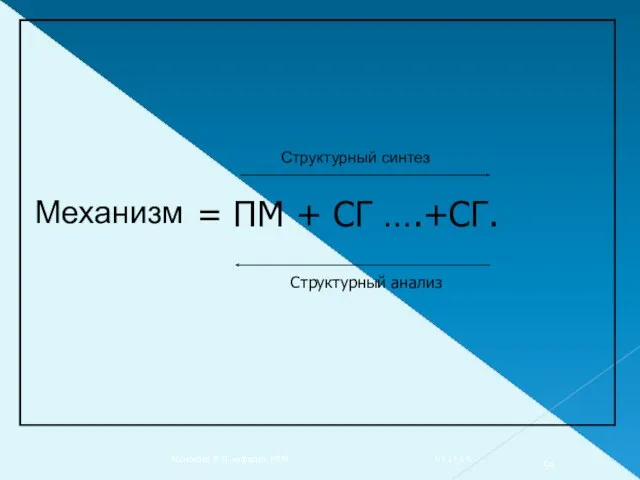
Механизм
Структурный синтез
= ПМ
+ СГ ….+СГ.
Структурный анализ
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
Механизм
Структурный синтез
= ПМ
+ СГ ….+СГ.
Структурный анализ
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
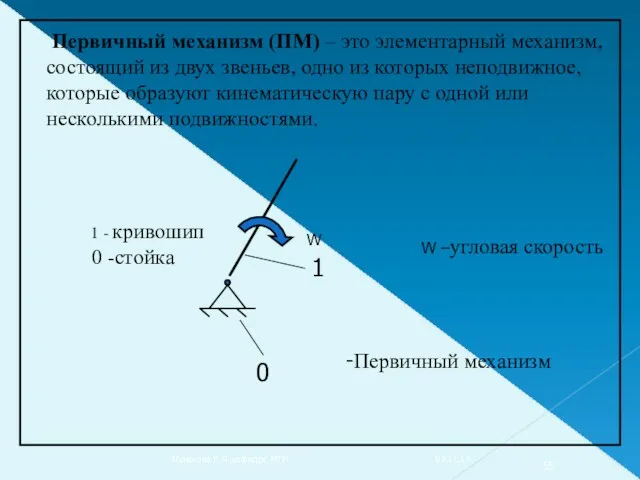
Первичный механизм (ПМ) – это элементарный механизм, состоящий из двух звеньев, одно
Первичный механизм (ПМ) – это элементарный механизм, состоящий из двух звеньев, одно
Структурная группа звеньев (СГ) – это кинематическая цепь, образованная подвижными звеньями, подвижность которой
Структурная группа звеньев (СГ) – это кинематическая цепь, образованная подвижными звеньями, подвижность которой
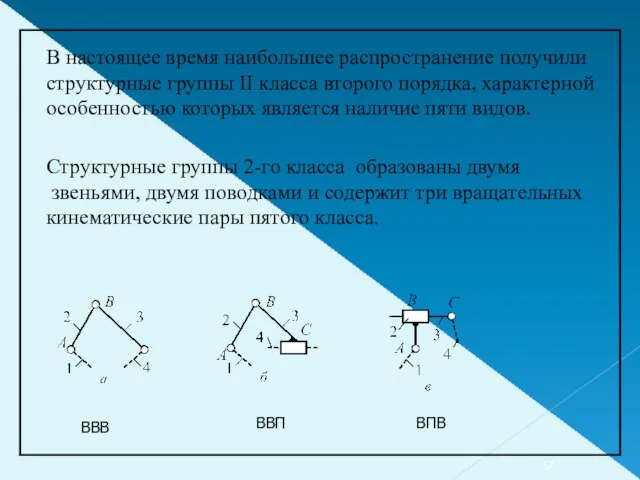
В настоящее время наибольшее распространение получили структурные группы II класса
В настоящее время наибольшее распространение получили структурные группы II класса
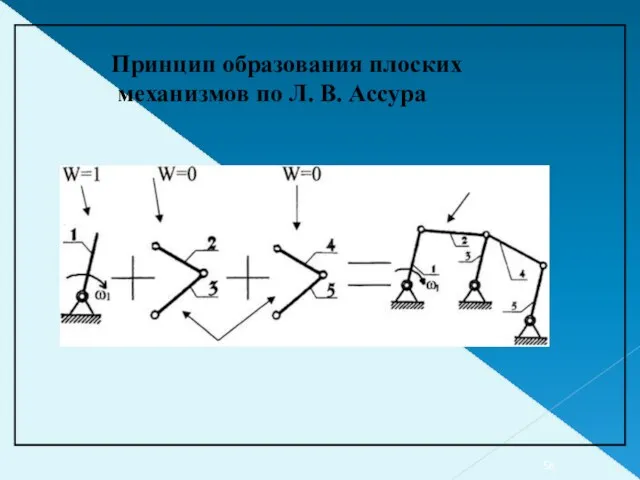
Принцип образования плоских
механизмов по Л. В. Ассура
Принцип образования плоских
механизмов по Л. В. Ассура
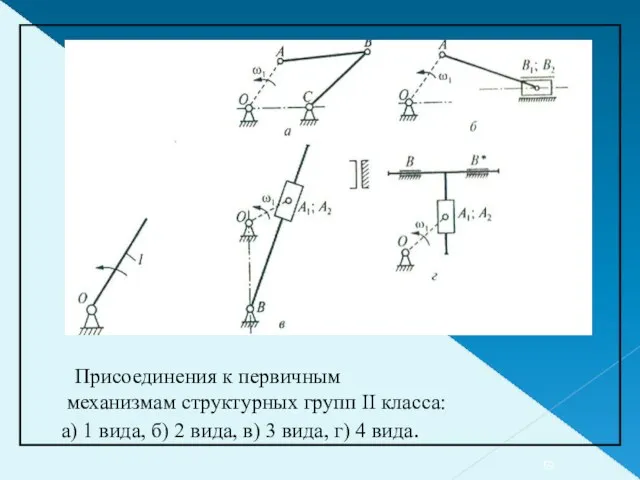
Присоединения к первичным
механизмам структурных групп II класса:
а) 1
Присоединения к первичным
механизмам структурных групп II класса:
а) 1
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
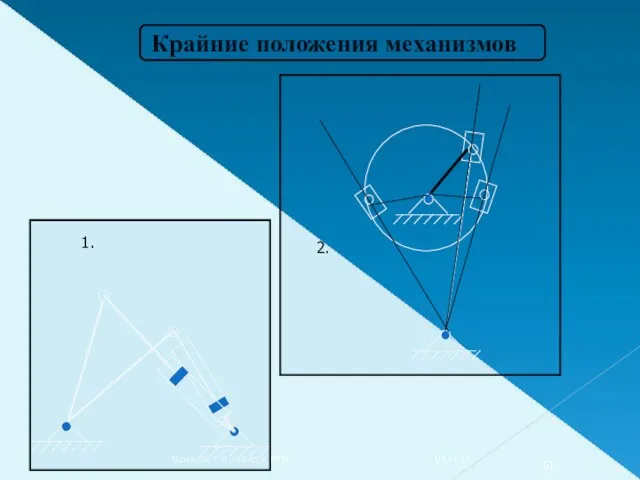
Крайние положения механизмов
1.
2.
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
Крайние положения механизмов
1.
2.
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
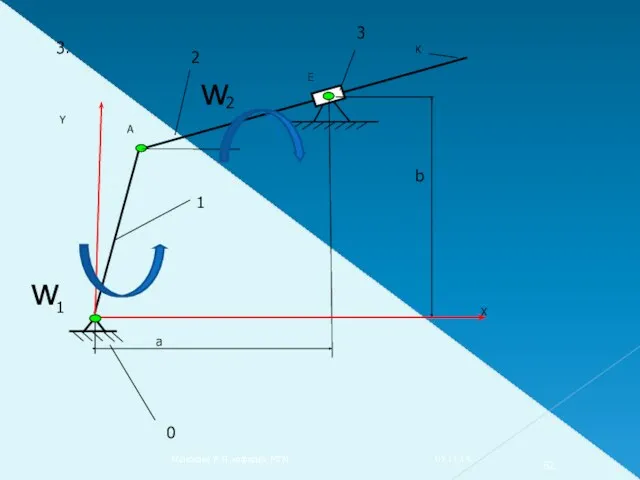
w
w
0
1
2
3
1
2
3.
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
w
w
0
1
2
3
1
2
3.
07.11.14.
Абдюкова Р.Я.,кафедра МТМ

План положений глубинного насоса.
Для выбора допустимых соотношений расстояний между
осями шарниров, обеспечивающих
План положений глубинного насоса.
Для выбора допустимых соотношений расстояний между
осями шарниров, обеспечивающих
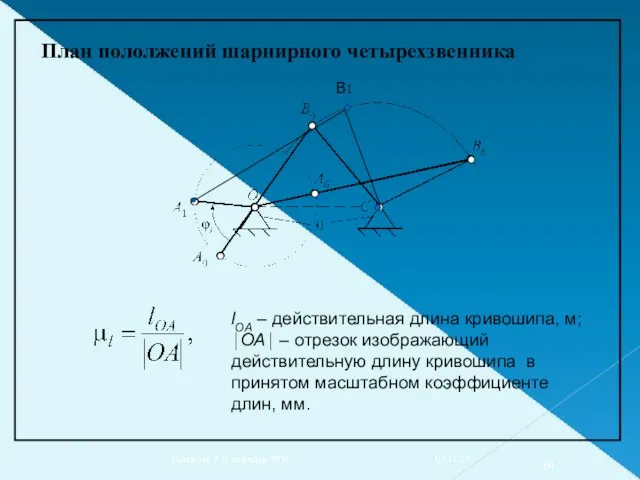
В1
План пололжений шарнирного четырехзвенника
lOA – действительная длина кривошипа, м; ⏐OA⏐ – отрезок изображающий действительную
В1
План пололжений шарнирного четырехзвенника
lOA – действительная длина кривошипа, м; ⏐OA⏐ – отрезок изображающий действительную
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
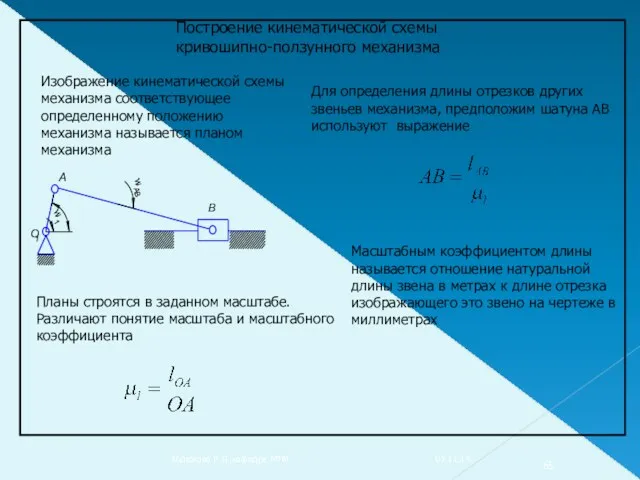
Построение кинематической схемы кривошипно-ползунного механизма
Изображение кинематической схемы механизма соответствующее
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
Построение кинематической схемы кривошипно-ползунного механизма
Изображение кинематической схемы механизма соответствующее
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
B
A
а.
б
в
Ход ползуна
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
B
A
а.
б
в
Ход ползуна
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
План положений кривошипно-ползунного механизма
Ход ползуна
1
2
3
4
6
12
9
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
План положений кривошипно-ползунного механизма
Ход ползуна
1
2
3
4
6
12
9
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
Метод планов скоростей и ускорений
Основан на графическом решении векторных
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
Метод планов скоростей и ускорений
Основан на графическом решении векторных
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
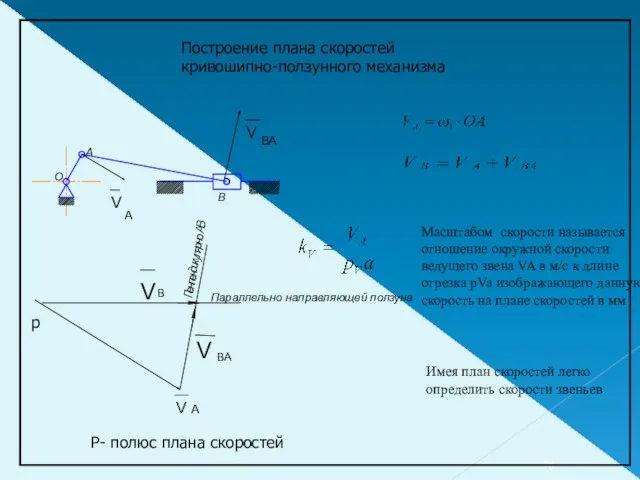
Построение плана скоростей кривошипно-ползунного механизма
V
ВА
А
V
V А
р
Р- полюс плана
Построение плана скоростей кривошипно-ползунного механизма
V
ВА
А
V
V А
р
Р- полюс плана
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
Планом скоростей (ускорений) механизма называют чертеж, построенный в масштабе
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
Планом скоростей (ускорений) механизма называют чертеж, построенный в масштабе
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
Свойства плана скоростей
Отрезки плана скоростей, проходящие через полюс, изображают
07.11.14.
Абдюкова Р.Я.,кафедра МТМ
Свойства плана скоростей
Отрезки плана скоростей, проходящие через полюс, изображают
 Ньютон Apple
Ньютон Apple Решение задач. Закон всемирного тяготения
Решение задач. Закон всемирного тяготения Игра Звёздный час по физике
Игра Звёздный час по физике 9 кл - Физический диктант Механические колебания
9 кл - Физический диктант Механические колебания Умови плавання тіл
Умови плавання тіл Модель малого космического аппарата, движимого солнечным парусом
Модель малого космического аппарата, движимого солнечным парусом Аккумулятор. Применение аккумуляторов в жизни
Аккумулятор. Применение аккумуляторов в жизни Центральное растяжение-сжатие
Центральное растяжение-сжатие Презентация Сила трения
Презентация Сила трения Открытый урок по физике в 7 классе Первоначальные сведения о веществе
Открытый урок по физике в 7 классе Первоначальные сведения о веществе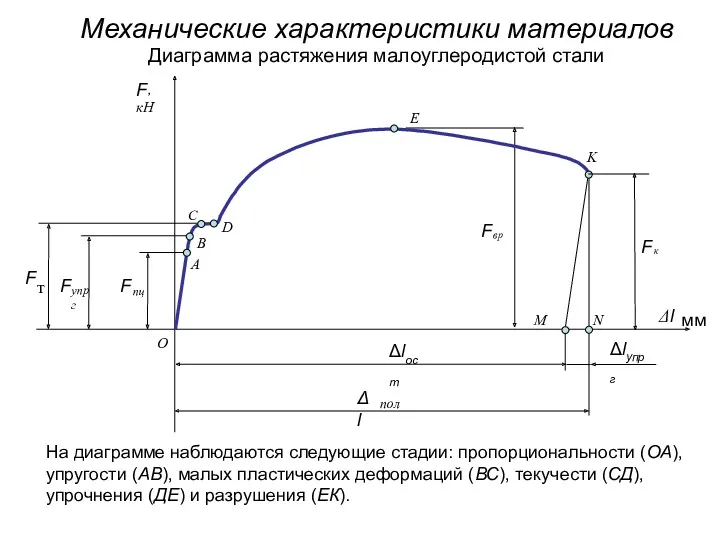 Механические характеристики материалов
Механические характеристики материалов Фотоэффект құбылысын түсіндіру. Эйнштейн формуласы. Фотоэффекет құбылысын техникада қолдану
Фотоэффект құбылысын түсіндіру. Эйнштейн формуласы. Фотоэффекет құбылысын техникада қолдану Теория механизмов и машин. Кинематический анализ механизмов
Теория механизмов и машин. Кинематический анализ механизмов Разработка установки для измерения магнитострикции
Разработка установки для измерения магнитострикции Законы Ньютона
Законы Ньютона Презентация к интегрированному уроку по теме: Кристаллические и аморфные тела
Презентация к интегрированному уроку по теме: Кристаллические и аморфные тела Bbs wheels range 1999 ilustrated catalog
Bbs wheels range 1999 ilustrated catalog Слайд презентация для урока по физике Закон Всемирного тяготения
Слайд презентация для урока по физике Закон Всемирного тяготения Магнитное поле и его графическое изображение. Неоднородное и однородное магнитное поле
Магнитное поле и его графическое изображение. Неоднородное и однородное магнитное поле Идеальный газ. Основное уравнение МКТ
Идеальный газ. Основное уравнение МКТ Устройство крышки бензобака
Устройство крышки бензобака Ионизирующие излучения
Ионизирующие излучения открытый урок тепловые машины
открытый урок тепловые машины Ремонт автомобилей. Технология восстановления деталей, узлов и приборов. (Тема 4.1)
Ремонт автомобилей. Технология восстановления деталей, узлов и приборов. (Тема 4.1) Электрическая цепь. Последовательное и параллельное соединение проводников
Электрическая цепь. Последовательное и параллельное соединение проводников Закон сохранения энергии. Адиабатический процесс
Закон сохранения энергии. Адиабатический процесс Определение поверхностного натяжения жидкостей
Определение поверхностного натяжения жидкостей Эксплуатация, диагностика и организация ремонта прокатного оборудования
Эксплуатация, диагностика и организация ремонта прокатного оборудования