- Теория радиосистем передачи информации. (Лекция 2)

Содержание
- 2. Математические модели сообщений N - длина последовательности j - моменты начального дискетного времени вероятность появления в
- 3. Математические модели сообщений Дискретный источник называется стационарным, если его статистическое описание не зависит от начала отсчета
- 4. Математические модели сообщений
- 5. Математические модели сообщений
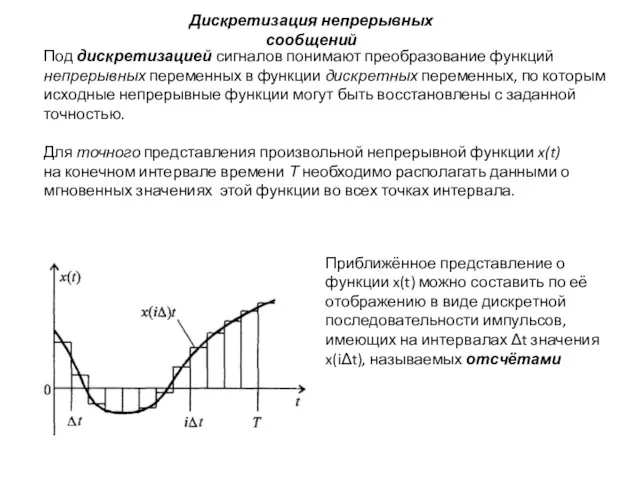
- 6. Дискретизация непрерывных сообщений Под дискретизацией сигналов понимают преобразование функций непрерывных переменных в функции дискретных переменных, по
- 7. Дискретизация непрерывных сообщений
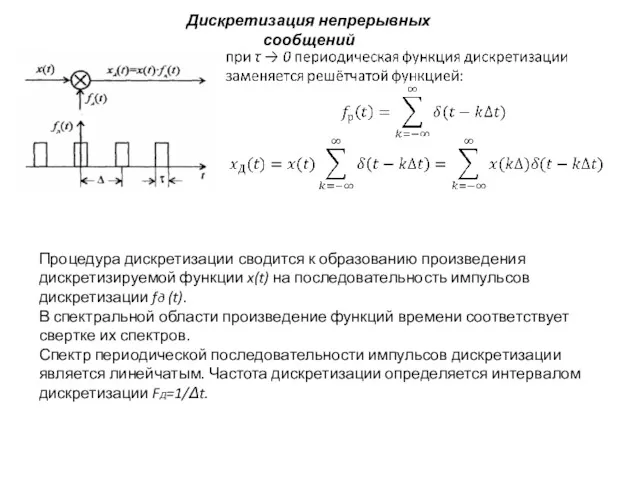
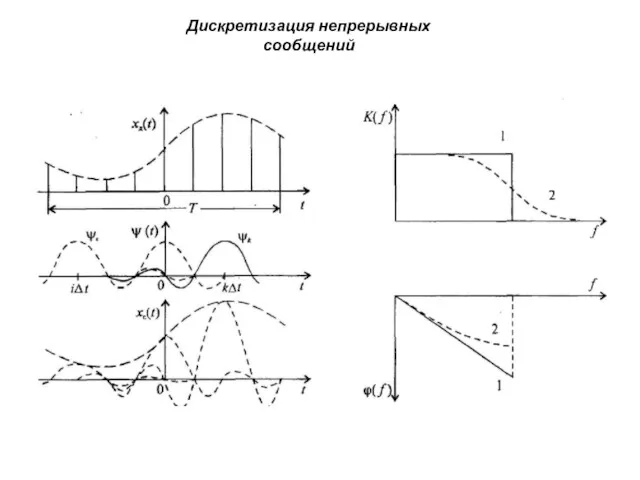
- 8. Дискретизация непрерывных сообщений Процедура дискретизации сводится к образованию произведения дискретизируемой функции x(t) на последовательность импульсов дискретизации
- 9. Дискретизация непрерывных сообщений
- 10. Дискретизация непрерывных сообщений
- 11. Дискретизация непрерывных сообщений
- 12. Дискретизация непрерывных сообщений
- 13. Дискретизация непрерывных сообщений Фундаментальное значение теоремы Котельникова заключается в том, что она обосновывает возможность дискретизации по
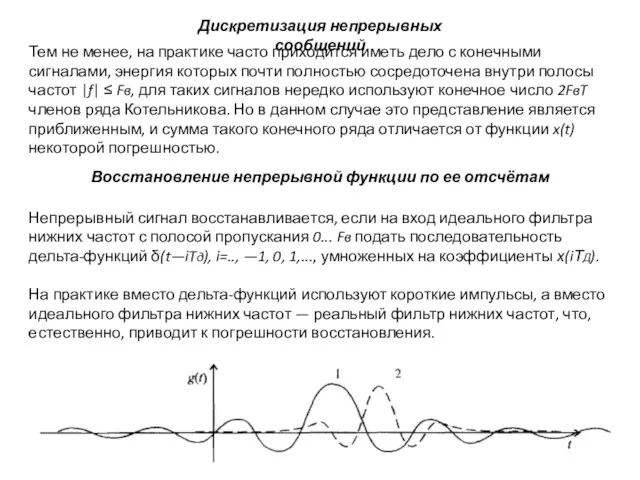
- 14. Дискретизация непрерывных сообщений Тем не менее, на практике часто приходится иметь дело с конечными сигналами, энергия
- 15. Дискретизация непрерывных сообщений
- 16. Дискретизация непрерывных сообщений Адаптивная дискретизация непрерывных сообщений В данном случае координатами являются мгновенные значения непрерывного сигнала
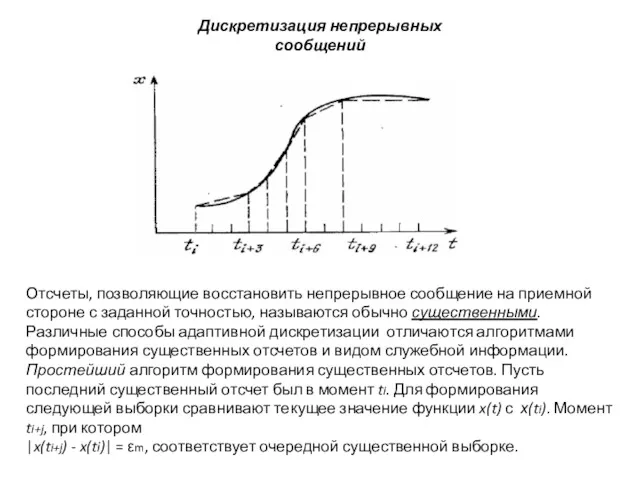
- 17. Дискретизация непрерывных сообщений Отсчеты, позволяющие восстановить непрерывное сообщение на приемной стороне с заданной точностью, называются обычно
- 18. При адаптивной дискретизации отсчеты передаются в случайные моменты. Поэтому для восстановления непрерывного сообщения по отсчетам приемная
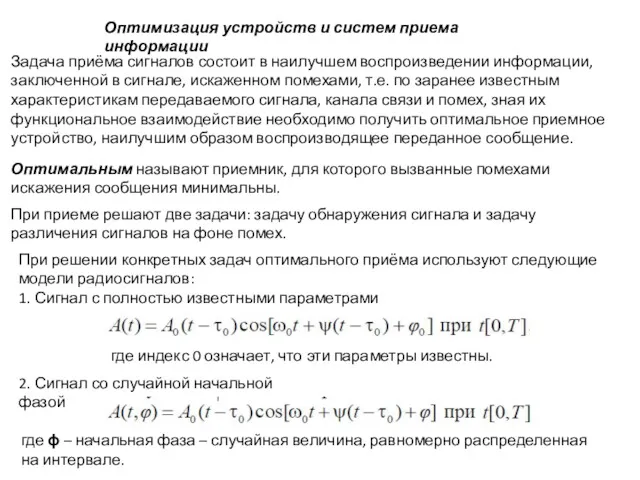
- 19. Оптимизация устройств и систем приема информации Задача приёма сигналов состоит в наилучшем воспроизведении информации, заключенной в
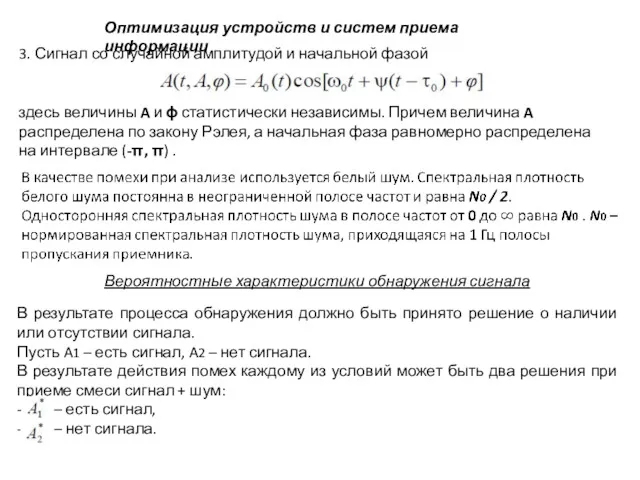
- 20. Оптимизация устройств и систем приема информации 3. Сигнал со случайной амплитудой и начальной фазой здесь величины
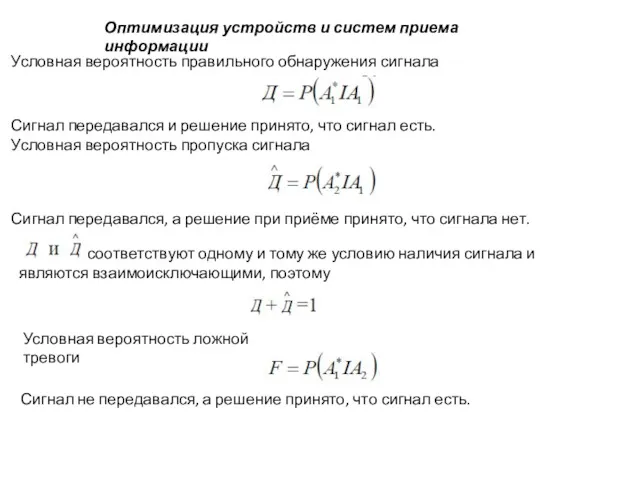
- 21. Оптимизация устройств и систем приема информации Условная вероятность правильного обнаружения сигнала Сигнал передавался и решение принято,
- 22. Оптимизация устройств и систем приема информации Условная вероятность правильного необнаружения Сигнал не передавался и решение принято,
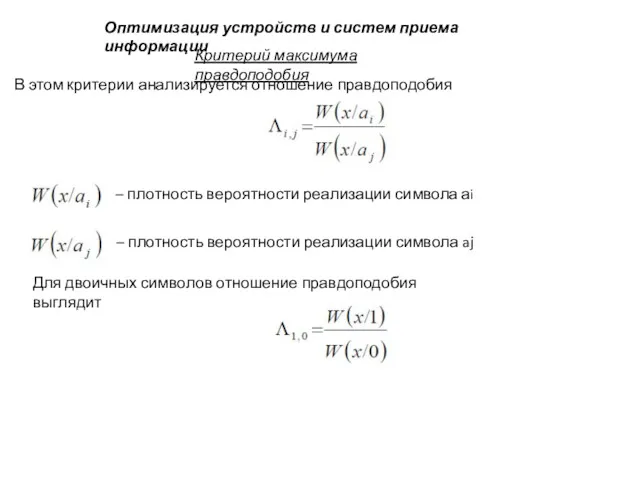
- 23. Оптимизация устройств и систем приема информации Критерий максимума правдоподобия В этом критерии анализируется отношение правдоподобия –
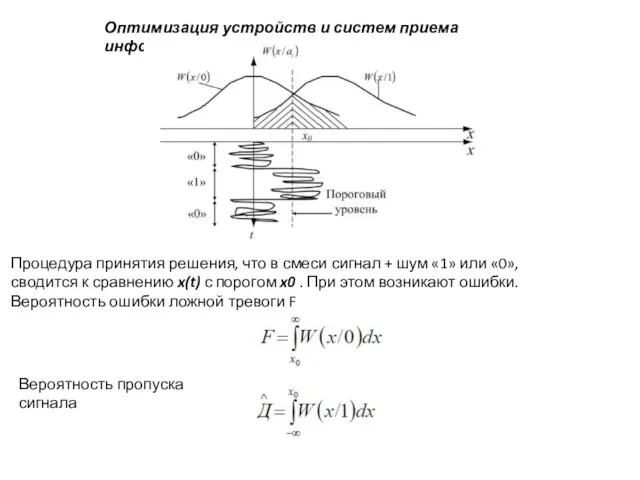
- 24. Оптимизация устройств и систем приема информации Процедура принятия решения, что в смеси сигнал + шум «1»
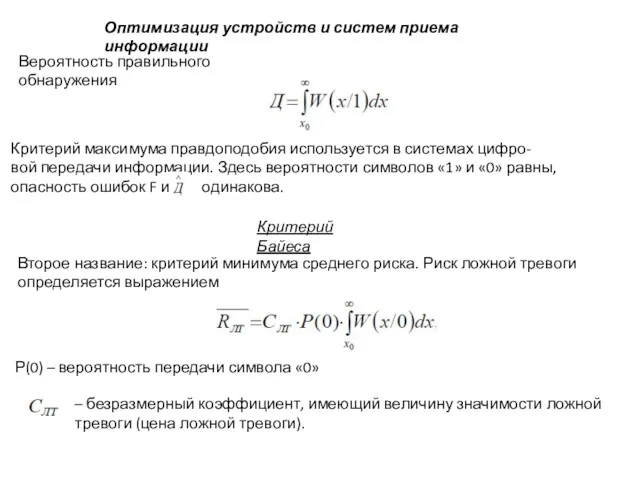
- 25. Оптимизация устройств и систем приема информации Вероятность правильного обнаружения Критерий максимума правдоподобия используется в системах цифро-
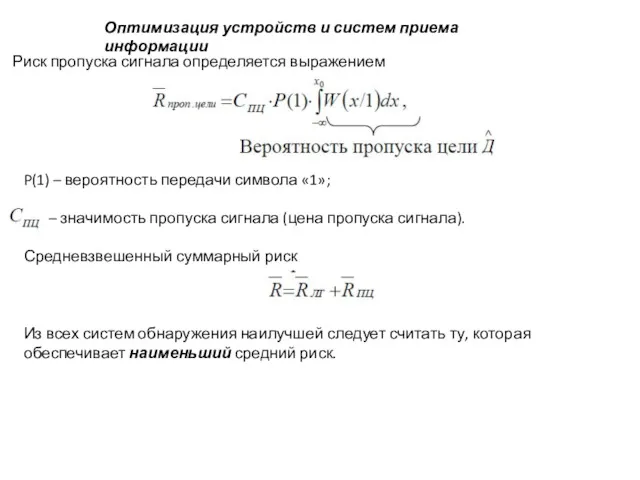
- 26. Оптимизация устройств и систем приема информации Риск пропуска сигнала определяется выражением P(1) – вероятность передачи символа
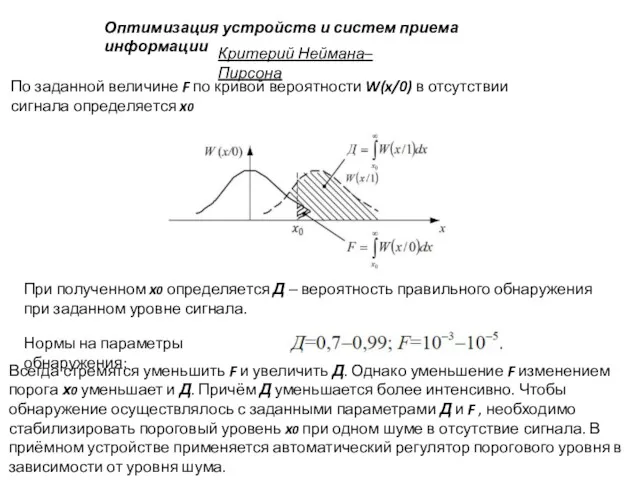
- 27. Оптимизация устройств и систем приема информации Критерий Неймана–Пирсона По заданной величине F по кривой вероятности W(x/0)
- 28. Оптимизация устройств и систем приема информации Корреляционный прием Корреляционный (когерентный) приём – это приём сигналов с
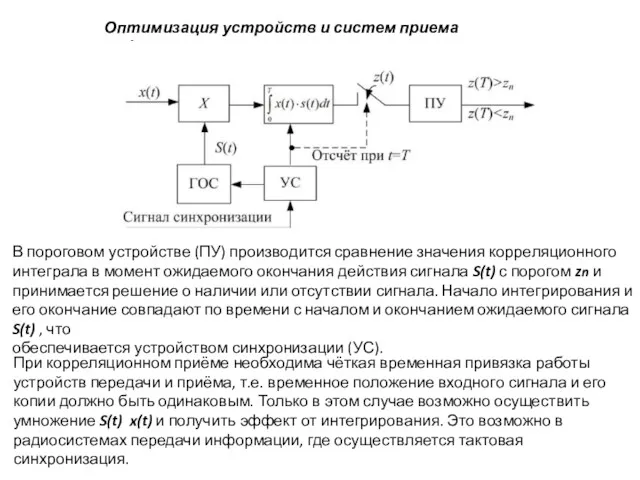
- 29. Оптимизация устройств и систем приема информации В пороговом устройстве (ПУ) производится сравнение значения корреляционного интеграла в
- 30. Оптимизация устройств и систем приема информации
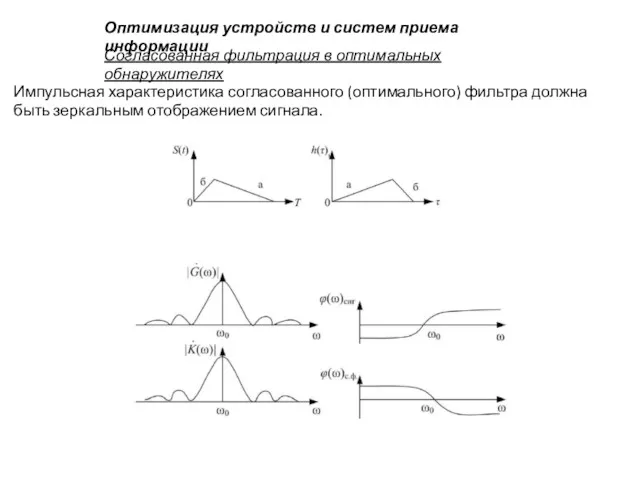
- 31. Оптимизация устройств и систем приема информации Согласованная фильтрация в оптимальных обнаружителях Импульсная характеристика согласованного (оптимального) фильтра
- 33. Скачать презентацию
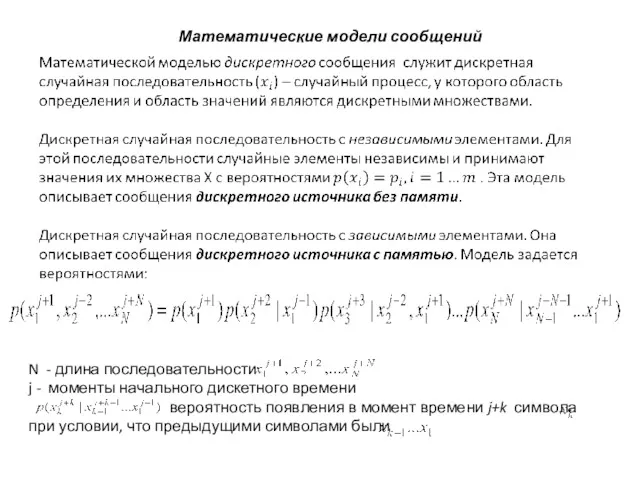
Математические модели сообщений
N - длина последовательности
j - моменты начального дискетного
Математические модели сообщений
N - длина последовательности
j - моменты начального дискетного
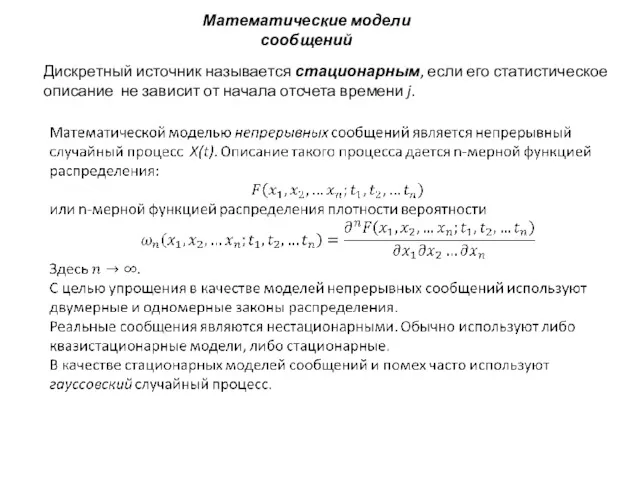
Математические модели сообщений
Дискретный источник называется стационарным, если его статистическое описание не
Математические модели сообщений
Дискретный источник называется стационарным, если его статистическое описание не
Математические модели сообщений
Математические модели сообщений
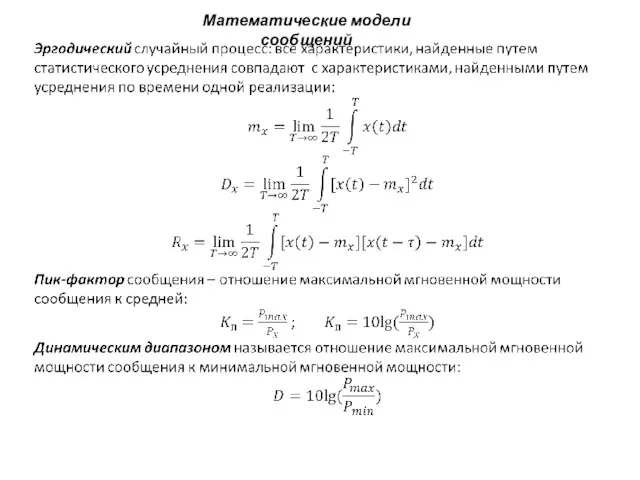
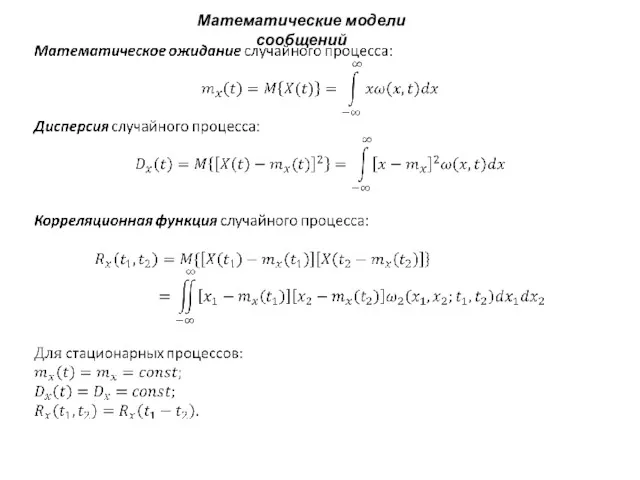
Математические модели сообщений
Математические модели сообщений
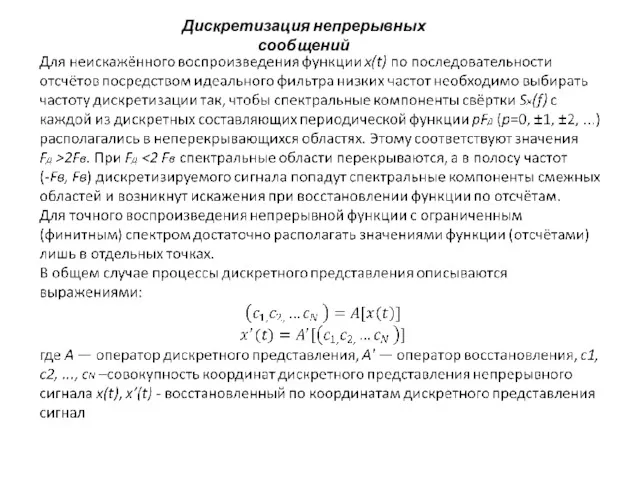
Дискретизация непрерывных сообщений
Под дискретизацией сигналов понимают преобразование функций непрерывных переменных в
Дискретизация непрерывных сообщений
Под дискретизацией сигналов понимают преобразование функций непрерывных переменных в
Дискретизация непрерывных сообщений
Дискретизация непрерывных сообщений
Дискретизация непрерывных сообщений
Процедура дискретизации сводится к образованию произведения дискретизируемой функции x(t)
Дискретизация непрерывных сообщений
Процедура дискретизации сводится к образованию произведения дискретизируемой функции x(t)
Дискретизация непрерывных сообщений
Дискретизация непрерывных сообщений
Дискретизация непрерывных сообщений
Дискретизация непрерывных сообщений
Дискретизация непрерывных сообщений
Дискретизация непрерывных сообщений
Дискретизация непрерывных сообщений
Дискретизация непрерывных сообщений
Дискретизация непрерывных сообщений
Фундаментальное значение теоремы Котельникова заключается в том, что она
Дискретизация непрерывных сообщений
Фундаментальное значение теоремы Котельникова заключается в том, что она
Дискретизация непрерывных сообщений
Тем не менее, на практике часто приходится иметь дело
Дискретизация непрерывных сообщений
Тем не менее, на практике часто приходится иметь дело
Дискретизация непрерывных сообщений
Дискретизация непрерывных сообщений
Дискретизация непрерывных сообщений
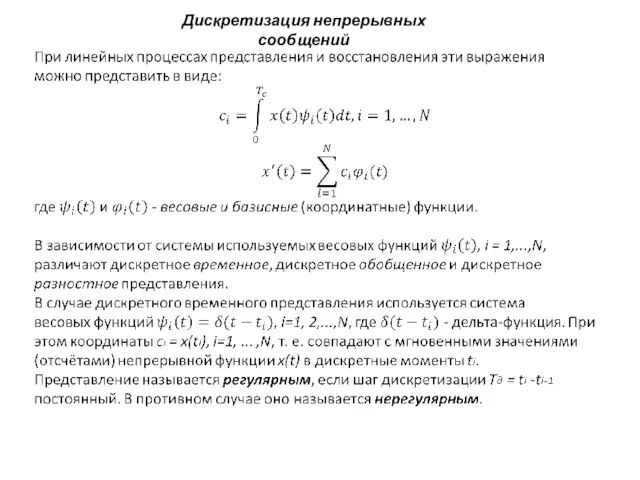
Адаптивная дискретизация непрерывных сообщений
В данном случае координатами являются мгновенные
Дискретизация непрерывных сообщений
Адаптивная дискретизация непрерывных сообщений
В данном случае координатами являются мгновенные
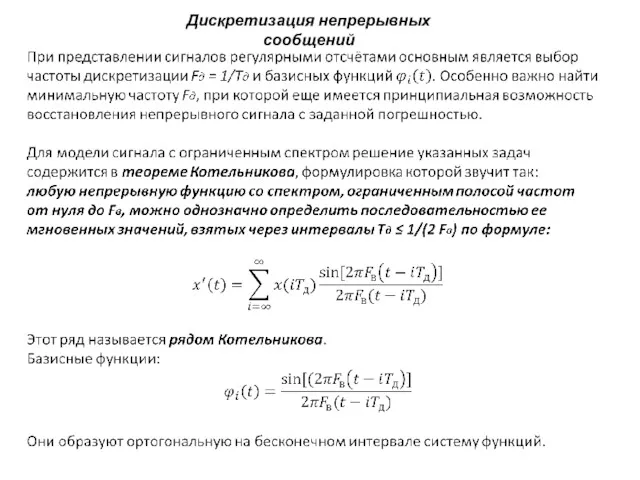
Дискретизация непрерывных сообщений
Отсчеты, позволяющие восстановить непрерывное сообщение на приемной стороне с
Дискретизация непрерывных сообщений
Отсчеты, позволяющие восстановить непрерывное сообщение на приемной стороне с
При адаптивной дискретизации отсчеты передаются в случайные моменты. Поэтому для восстановления
При адаптивной дискретизации отсчеты передаются в случайные моменты. Поэтому для восстановления
Оптимизация устройств и систем приема информации
Задача приёма сигналов состоит в наилучшем
Оптимизация устройств и систем приема информации
Задача приёма сигналов состоит в наилучшем
Оптимизация устройств и систем приема информации
3. Сигнал со случайной амплитудой и
Оптимизация устройств и систем приема информации
3. Сигнал со случайной амплитудой и
Оптимизация устройств и систем приема информации
Условная вероятность правильного обнаружения сигнала
Сигнал передавался
Оптимизация устройств и систем приема информации
Условная вероятность правильного обнаружения сигнала
Сигнал передавался
Оптимизация устройств и систем приема информации
Условная вероятность правильного необнаружения
Сигнал не передавался
Оптимизация устройств и систем приема информации
Условная вероятность правильного необнаружения
Сигнал не передавался
Оптимизация устройств и систем приема информации
Критерий максимума правдоподобия
В этом критерии анализируется
Оптимизация устройств и систем приема информации
Критерий максимума правдоподобия
В этом критерии анализируется
Оптимизация устройств и систем приема информации
Процедура принятия решения, что в смеси
Оптимизация устройств и систем приема информации
Процедура принятия решения, что в смеси
Оптимизация устройств и систем приема информации
Вероятность правильного обнаружения
Критерий максимума правдоподобия используется
Оптимизация устройств и систем приема информации
Вероятность правильного обнаружения
Критерий максимума правдоподобия используется
Оптимизация устройств и систем приема информации
Риск пропуска сигнала определяется выражением
P(1) –
Оптимизация устройств и систем приема информации
Риск пропуска сигнала определяется выражением
P(1) –
Оптимизация устройств и систем приема информации
Критерий Неймана–Пирсона
По заданной величине F по
Оптимизация устройств и систем приема информации
Критерий Неймана–Пирсона
По заданной величине F по
Оптимизация устройств и систем приема информации
Корреляционный прием
Корреляционный (когерентный) приём – это
Оптимизация устройств и систем приема информации
Корреляционный прием
Корреляционный (когерентный) приём – это
Оптимизация устройств и систем приема информации
В пороговом устройстве (ПУ) производится сравнение
Оптимизация устройств и систем приема информации
В пороговом устройстве (ПУ) производится сравнение

Оптимизация устройств и систем приема информации
Оптимизация устройств и систем приема информации
Оптимизация устройств и систем приема информации
Согласованная фильтрация в оптимальных обнаружителях
Импульсная характеристика
Оптимизация устройств и систем приема информации
Согласованная фильтрация в оптимальных обнаружителях
Импульсная характеристика
 Методическая разработка урока Электроскоп. Электрометр. Проводники и диэлектрики
Методическая разработка урока Электроскоп. Электрометр. Проводники и диэлектрики Постоянные магниты. Магнитное поле Земли
Постоянные магниты. Магнитное поле Земли Елементи теорії поля. (Лекція 10)
Елементи теорії поля. (Лекція 10) Испарение. Поглощение энергии при испарении и выделение её при конденсации пара
Испарение. Поглощение энергии при испарении и выделение её при конденсации пара Реактивное движение. Ракеты
Реактивное движение. Ракеты Capacitance in an AC circuit
Capacitance in an AC circuit Нахождение механической силы через силу и перемещение
Нахождение механической силы через силу и перемещение конспект урока на тему: Атмосферное давление. Вес воздуха
конспект урока на тему: Атмосферное давление. Вес воздуха Первый закон Ньютона
Первый закон Ньютона Исследовательская работа в области естествознания. Анемометр в измерении силы ветра. Автор: Григорьев Никита, 11 лет, 6 Б класс
Исследовательская работа в области естествознания. Анемометр в измерении силы ветра. Автор: Григорьев Никита, 11 лет, 6 Б класс Научно-исследовательская работа по физике Электричество из овощей и фруктов (5 класс)
Научно-исследовательская работа по физике Электричество из овощей и фруктов (5 класс) Трансформатор. Қазіргі трансформаторлар
Трансформатор. Қазіргі трансформаторлар Почему внутри жидкостей существует давление?
Почему внутри жидкостей существует давление? Механічна енергія. Потенціальна і кінетична енергії тіла
Механічна енергія. Потенціальна і кінетична енергії тіла Рентгеновское излучение
Рентгеновское излучение Световые явления
Световые явления Изотопы
Изотопы Движение тела под действием силы трения
Движение тела под действием силы трения Атом құрылысы
Атом құрылысы Контур с током в магнитном поле
Контур с током в магнитном поле Учебный проект по теме Виды теплопередачи
Учебный проект по теме Виды теплопередачи Компенсация реактивной мощности
Компенсация реактивной мощности Элементы теории атомного ядра
Элементы теории атомного ядра Проезентация по теме Дисперсия света
Проезентация по теме Дисперсия света Введение в радиосвязь
Введение в радиосвязь 11 класс. Презентация по физике на тему Волновые явления.
11 класс. Презентация по физике на тему Волновые явления. Законы Кирхгофа
Законы Кирхгофа Устройство и назначение карданной передачи в автомобиле
Устройство и назначение карданной передачи в автомобиле