- teoriya_avtomaticheskogo_upravleniya_Polulah_parth3

Содержание
- 2. 3. Модели линейных объектов 3.9. Логарифмические частотные характеристики Частотные характеристики достаточно сложно строить вручную. В 60-е
- 3. 3. Модели линейных объектов Вместо A(ω) было предложено использовать логарифмическую амплитудную частотную характеристику (ЛАЧХ): график, на
- 4. 3. Модели линейных объектов Децибелы - это десять умножить на десятичный логарифм отношения мощностей сигналов (или
- 5. 3. Модели линейных объектов Единицей отсчета на логарифмической оси частот является декада – диапазон, на котором
- 6. 3. Модели линейных объектов 2) в области высоких и низких частот ЛАЧХ асимптотически приближаются к прямым,
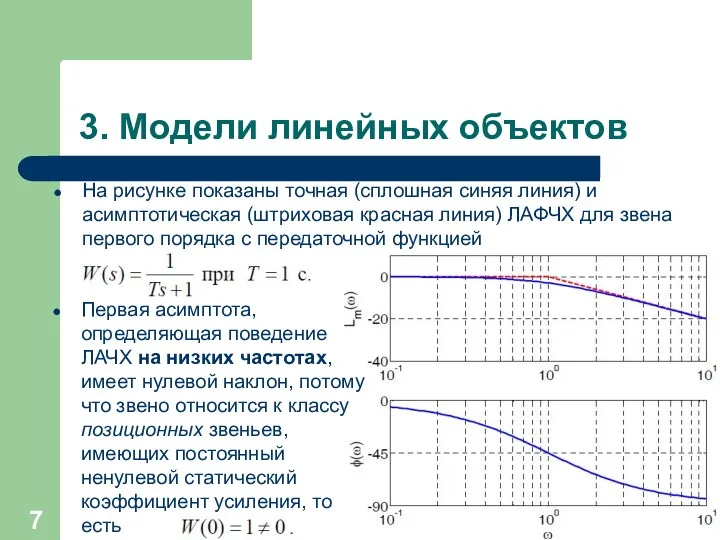
- 7. 3. Модели линейных объектов На рисунке показаны точная (сплошная синяя линия) и асимптотическая (штриховая красная линия)
- 8. 3. Модели линейных объектов Если W(0) = 0 , передаточная функция содержит множитель sk ( k
- 9. 4. Типовые динамические звенья Обычно система управления состоит из отдельных блоков, каждый из которых описывается уравнениями
- 10. 4. Типовые динамические звенья 4.1. Усилитель Звенья, имеющие конечный ненулевой коэффициент усиления постоянного сигнала, то есть
- 11. 4. Типовые динамические звенья Если на вход усилителя действует синусоидальный сигнал, на выходе он усиливается в
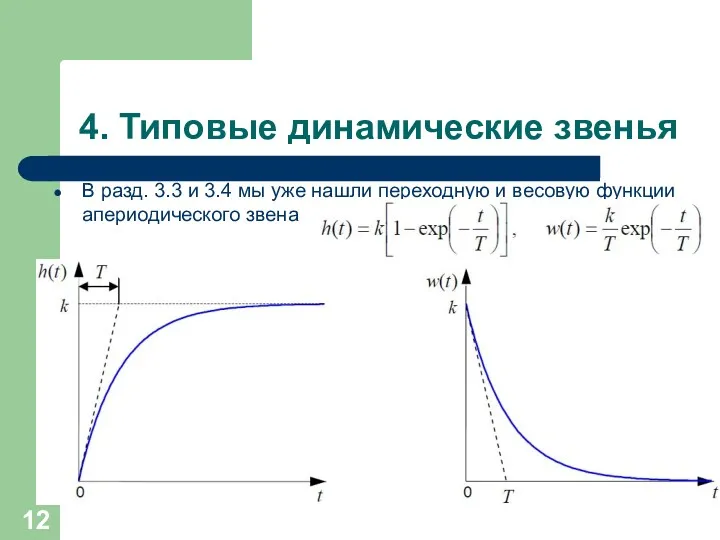
- 12. 4. Типовые динамические звенья В разд. 3.3 и 3.4 мы уже нашли переходную и весовую функции
- 13. 4. Типовые динамические звенья Обратите внимание, что предельное значение переходной характеристики равно k , а касательная
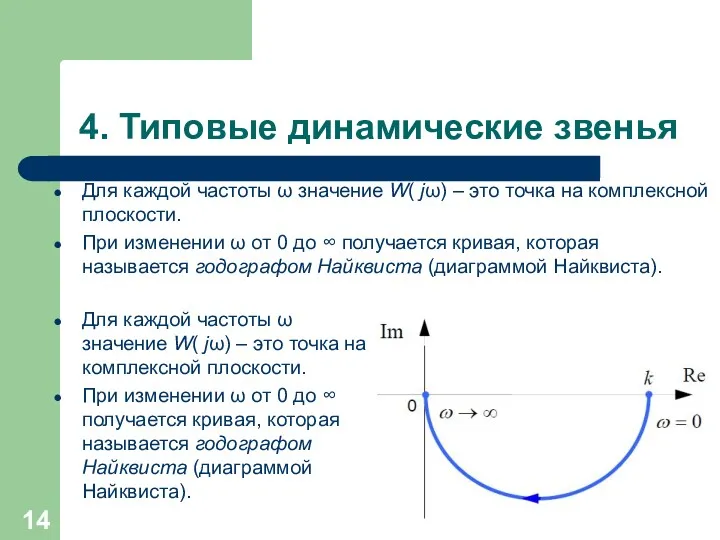
- 14. 4. Типовые динамические звенья Для каждой частоты ω значение W( jω) – это точка на комплексной
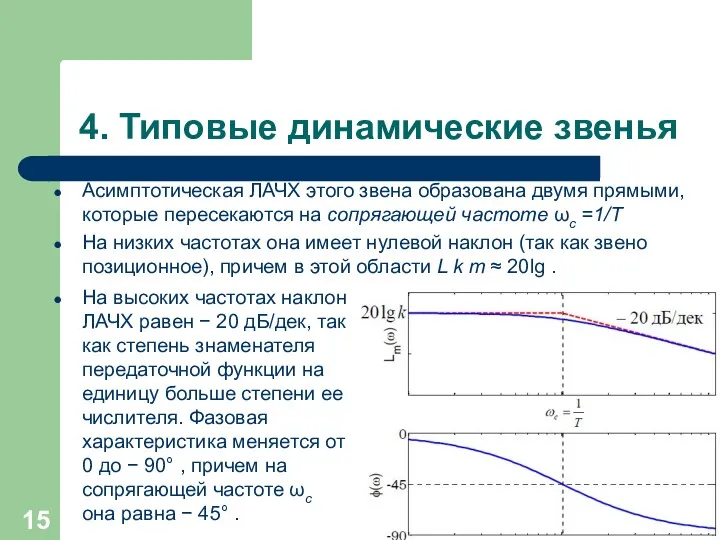
- 15. 4. Типовые динамические звенья Асимптотическая ЛАЧХ этого звена образована двумя прямыми, которые пересекаются на сопрягающей частоте
- 16. 4. Типовые динамические звенья Поскольку ЛАЧХ уменьшается на высоких частотах, апериодическое звено подавляет высокочастотные шумы, то
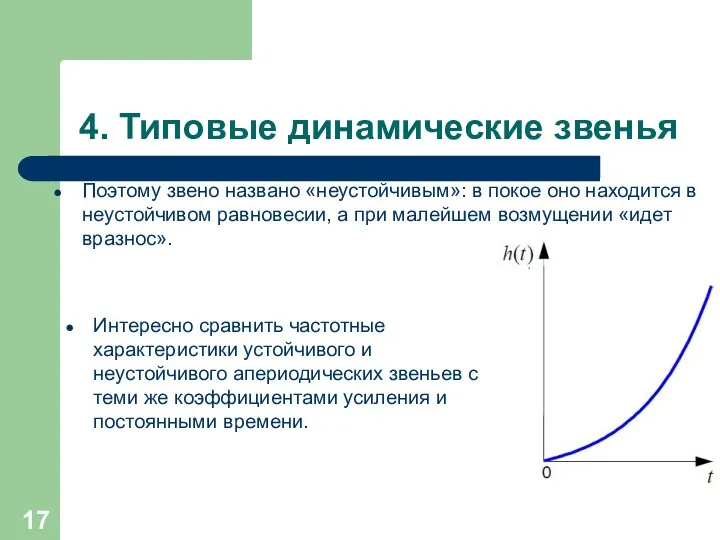
- 17. 4. Типовые динамические звенья Поэтому звено названо «неустойчивым»: в покое оно находится в неустойчивом равновесии, а
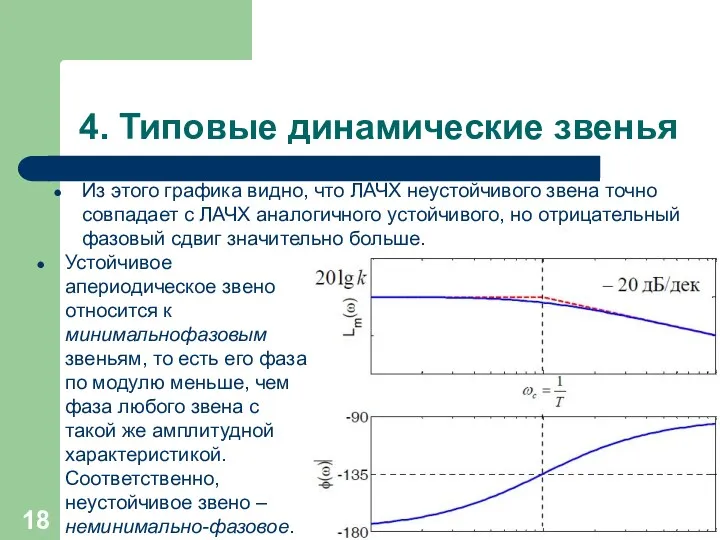
- 18. 4. Типовые динамические звенья Из этого графика видно, что ЛАЧХ неустойчивого звена точно совпадает с ЛАЧХ
- 19. 4. Типовые динамические звенья К неминимально-фазовым звеньям относятся все звенья, передаточные функции которых имеют нули или
- 20. 4. Типовые динамические звенья 4.3. Колебательное звено Колебательное звено – это звено второго порядка с передаточной
- 21. 4. Типовые динамические звенья Несложно представить передаточную функцию колебательного звена в форме где k – коэффициент,
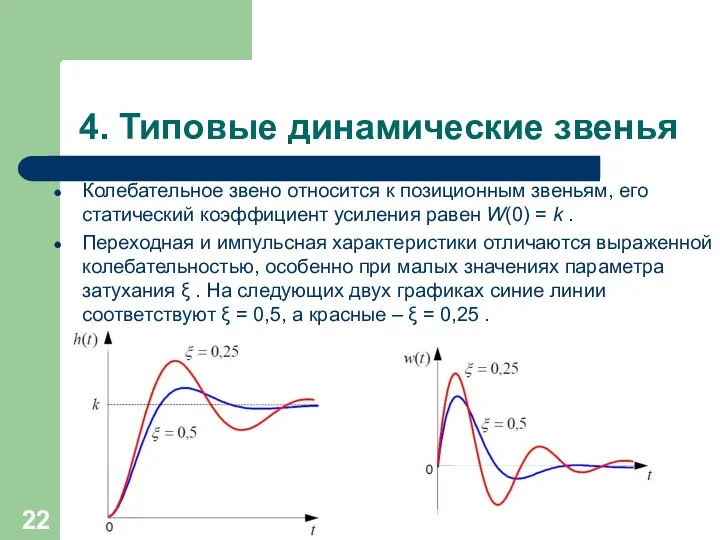
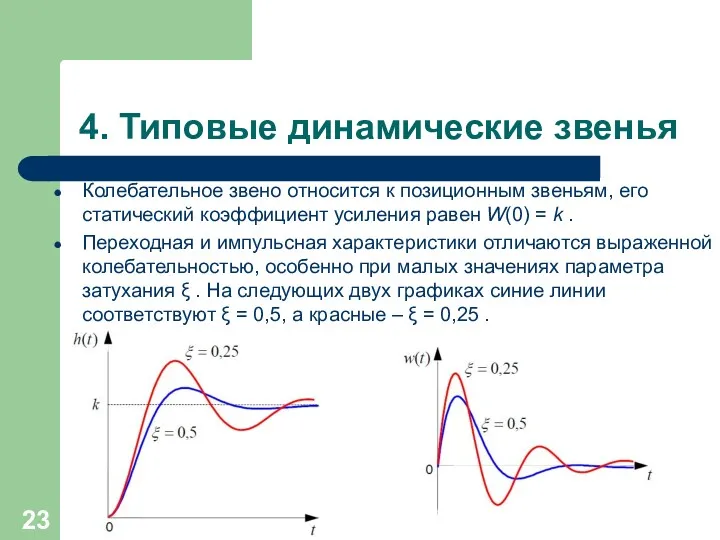
- 22. 4. Типовые динамические звенья Колебательное звено относится к позиционным звеньям, его статический коэффициент усиления равен W(0)
- 23. 4. Типовые динамические звенья Колебательное звено относится к позиционным звеньям, его статический коэффициент усиления равен W(0)
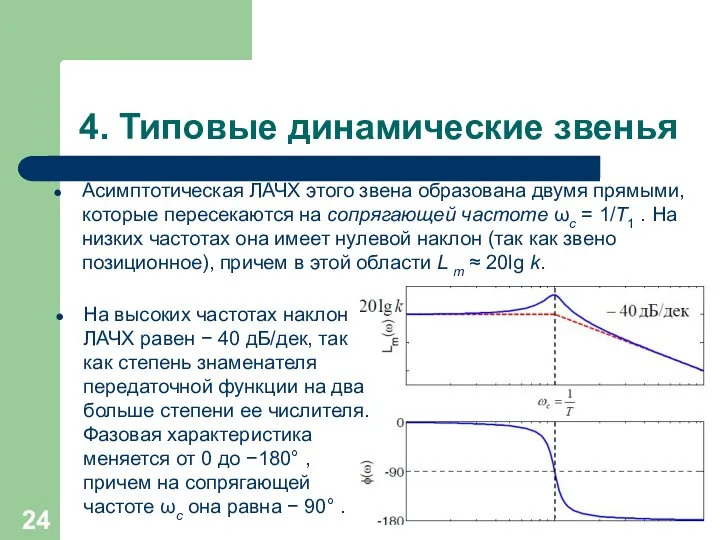
- 24. 4. Типовые динамические звенья Асимптотическая ЛАЧХ этого звена образована двумя прямыми, которые пересекаются на сопрягающей частоте
- 25. 4. Типовые динамические звенья При значениях ξ В предельном случае при ξ = 0 (консервативное звено)
- 26. 4. Типовые динамические звенья 4.4. Интегрирующее звено Простейший пример интегрирующего звена – ванна, в которую набирается
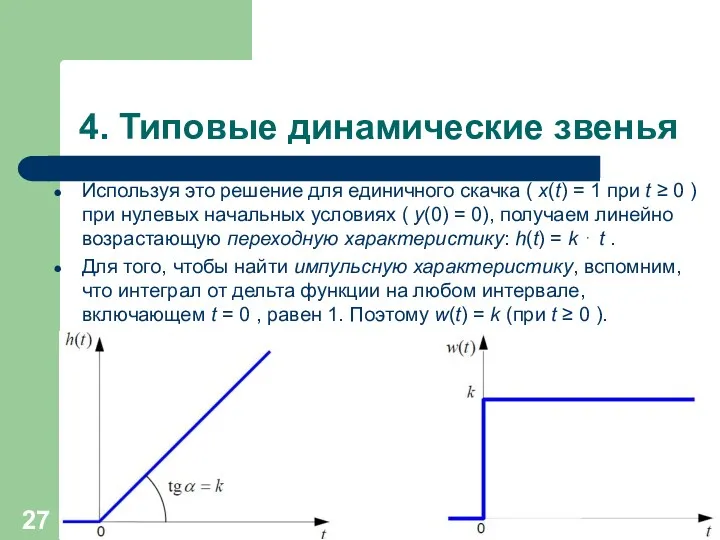
- 27. 4. Типовые динамические звенья Используя это решение для единичного скачка ( x(t) = 1 при t
- 28. 4. Типовые динамические звенья Частотная характеристика интегрирующего звена определяется формулой Можно показать, что его логарифмическая амплитудная
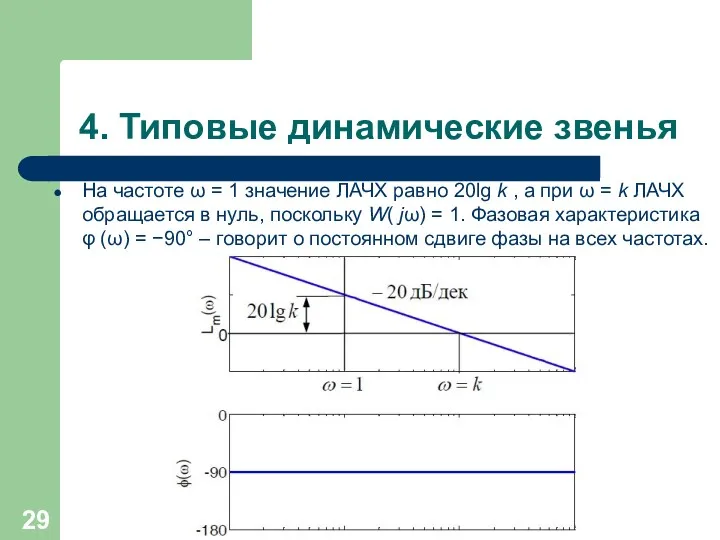
- 29. 4. Типовые динамические звенья На частоте ω = 1 значение ЛАЧХ равно 20lg k , а
- 30. 4. Типовые динамические звенья 4.5. Дифференцирующие звенья Дифференцирующее звено дает на выходе производную входного сигнала. Уравнение
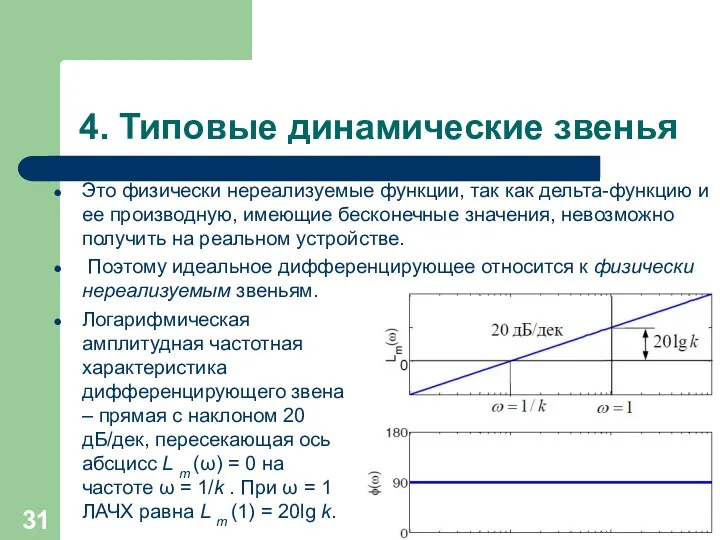
- 31. 4. Типовые динамические звенья Это физически нереализуемые функции, так как дельта-функцию и ее производную, имеющие бесконечные
- 32. 4. Типовые динамические звенья Дифференцирующее звено подавляет низкие частоты (производная от постоянного сигнала равна нулю) и
- 33. 4. Типовые динамические звенья В технике не могут использоваться физически нереализуемые звенья. Поэтому важно рассмотреть аналогичное
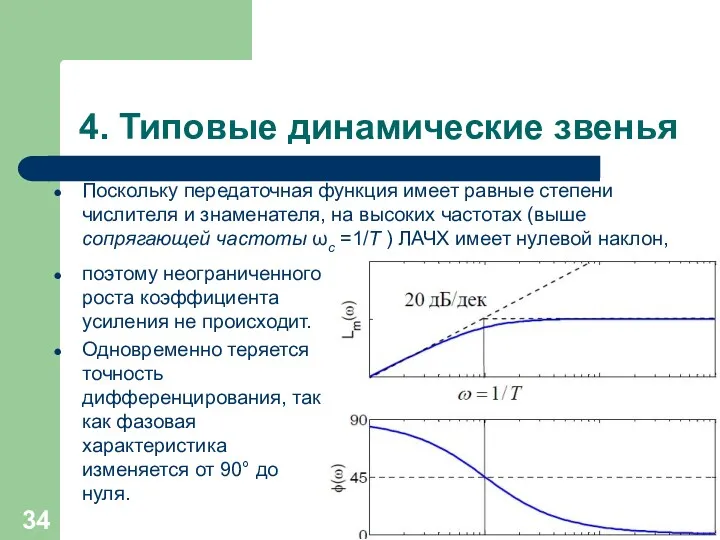
- 34. 4. Типовые динамические звенья Поскольку передаточная функция имеет равные степени числителя и знаменателя, на высоких частотах
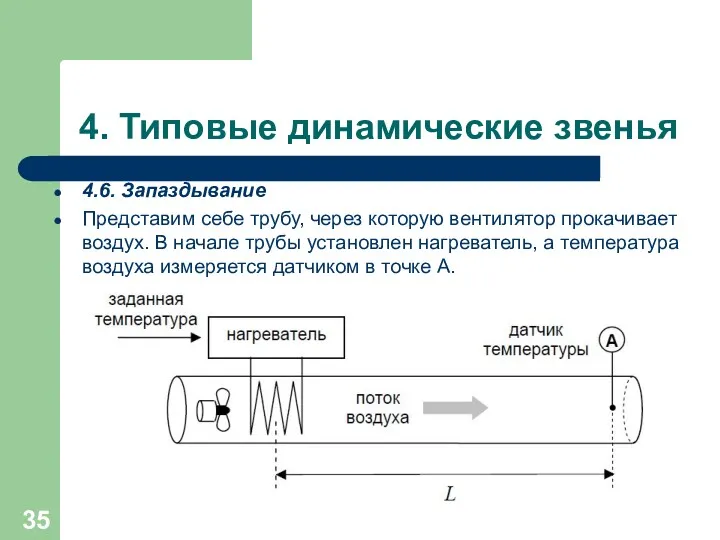
- 35. 4. Типовые динамические звенья 4.6. Запаздывание Представим себе трубу, через которую вентилятор прокачивает воздух. В начале
- 36. 4. Типовые динамические звенья Очевидно, что при изменении температуры воздуха датчик обнаружит это не сразу, а
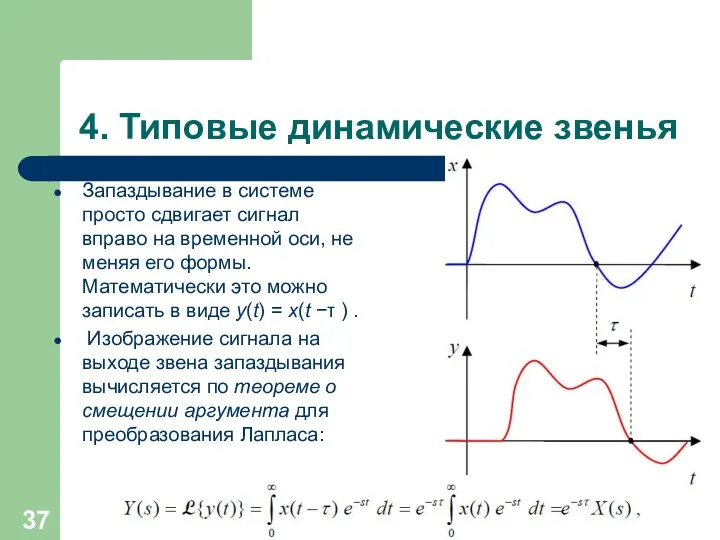
- 37. 4. Типовые динамические звенья Запаздывание в системе просто сдвигает сигнал вправо на временной оси, не меняя
- 38. 4. Типовые динамические звенья Передаточная функция звена чистого запаздывания равна Очевидно, что при гармоническом входном сигнале
- 39. 4. Типовые динамические звенья 4.7. «Обратные» звенья Звено с передаточной функцией назовем «обратным» звеном для звена
- 40. 4. Типовые динамические звенья Для «обратного» звена получим что после простых преобразований дает Таким образом, для
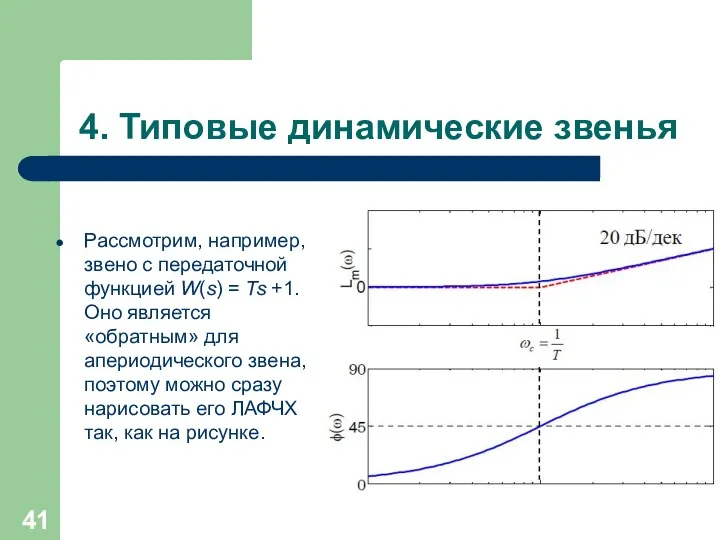
- 41. 4. Типовые динамические звенья Рассмотрим, например, звено с передаточной функцией W(s) = Ts +1. Оно является
- 42. 4. Типовые динамические звенья Для звена чистого запаздывания «обратным» будет звено с передаточной функцией W~ (s)
- 43. 4. Типовые динамические звенья 4.8. ЛАФЧХ сложных звеньев Для построения ЛАФЧХ звеньев со сложными передаточными функциями
- 44. 4. Типовые динамические звенья Представим передаточную функцию в виде произведения Таким образом, это звено представляет собой
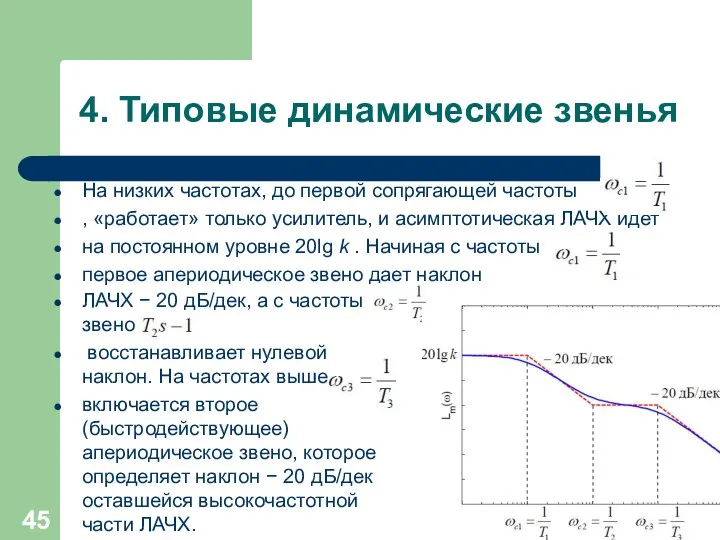
- 45. 4. Типовые динамические звенья На низких частотах, до первой сопрягающей частоты , «работает» только усилитель, и
- 46. 4. Типовые динамические звенья Для построения фазовой характеристики желательно использовать компьютерные программы. Однако принцип остается тот
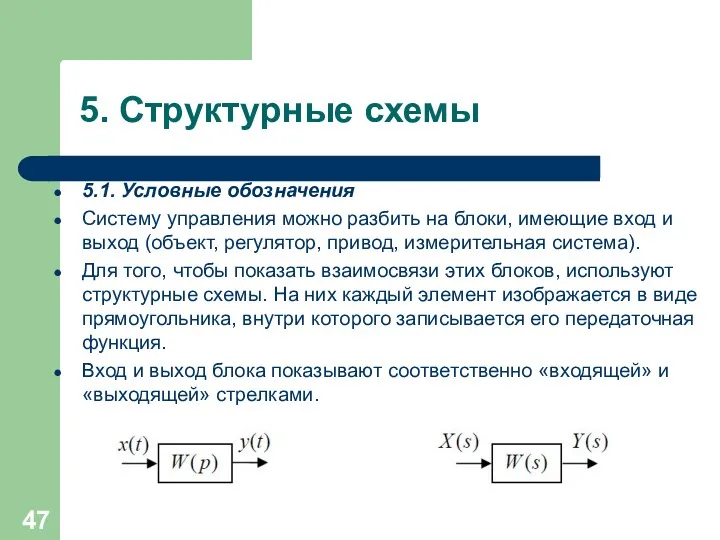
- 47. 5. Структурные схемы 5.1. Условные обозначения Систему управления можно разбить на блоки, имеющие вход и выход
- 48. 5. Структурные схемы Строго говоря, есть две формы записи: • операторная запись, когда передаточная функция записывается
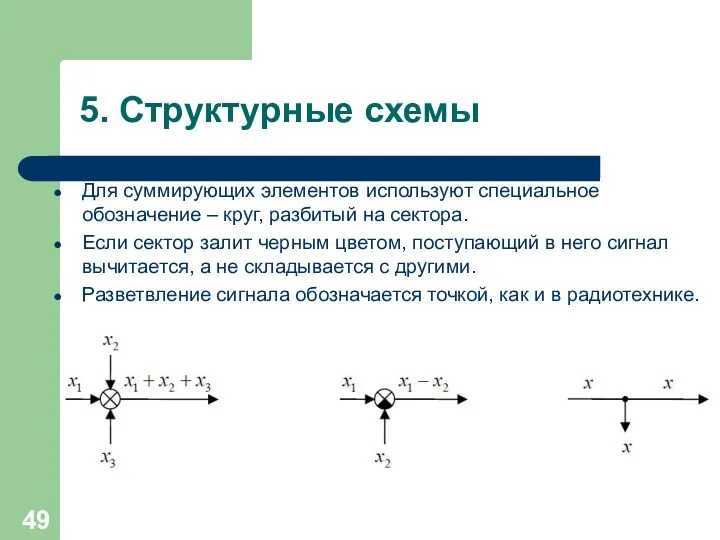
- 49. 5. Структурные схемы Для суммирующих элементов используют специальное обозначение – круг, разбитый на сектора. Если сектор
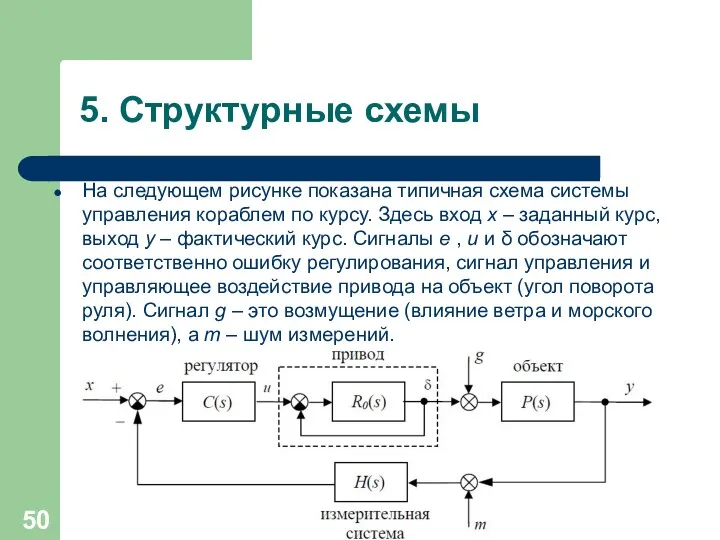
- 50. 5. Структурные схемы На следующем рисунке показана типичная схема системы управления кораблем по курсу. Здесь вход
- 51. 5. Структурные схемы В системе управления курса кроме «большого» контура управления (регулятор – привод – объект)
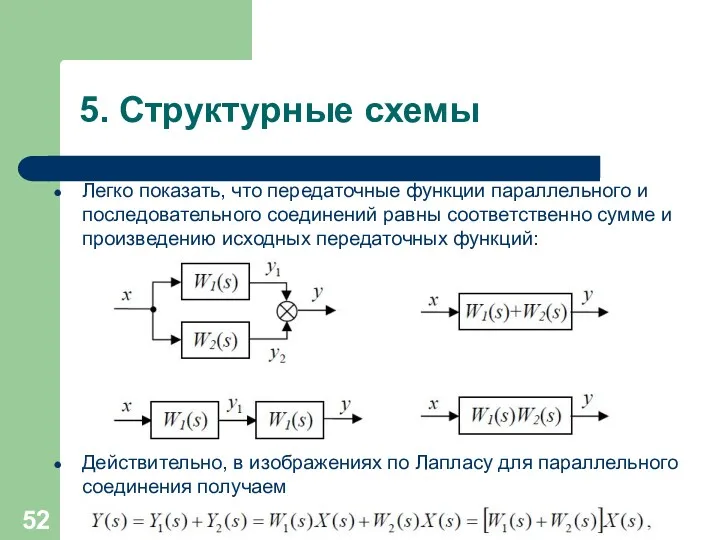
- 52. 5. Структурные схемы Легко показать, что передаточные функции параллельного и последовательного соединений равны соответственно сумме и
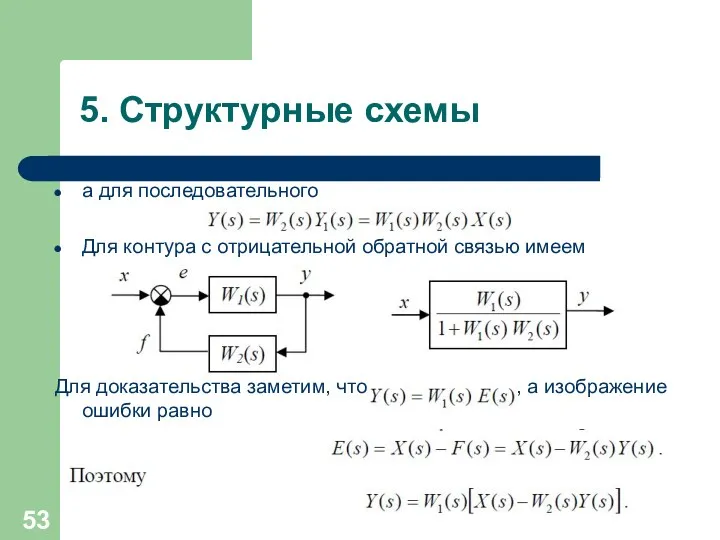
- 53. 5. Структурные схемы а для последовательного Для контура с отрицательной обратной связью имеем Для доказательства заметим,
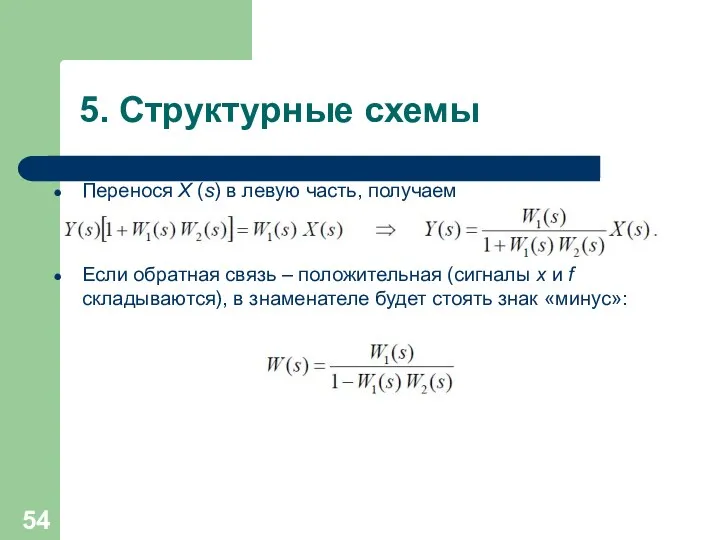
- 54. 5. Структурные схемы Перенося X (s) в левую часть, получаем Если обратная связь – положительная (сигналы
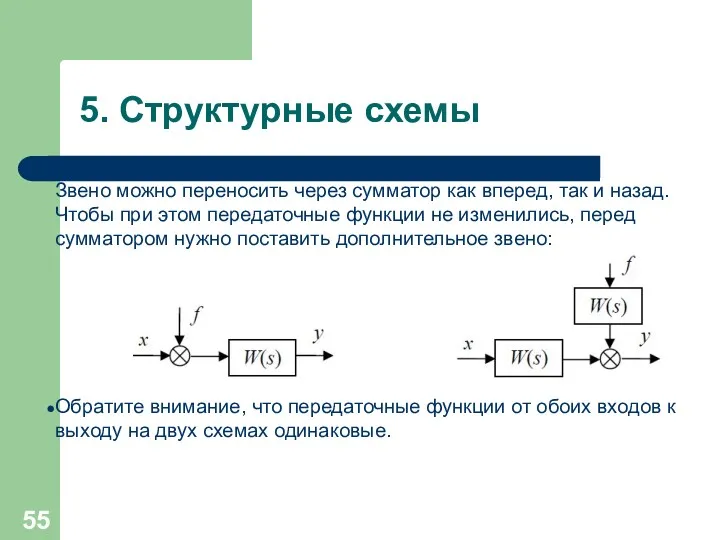
- 55. 5. Структурные схемы Звено можно переносить через сумматор как вперед, так и назад. Чтобы при этом
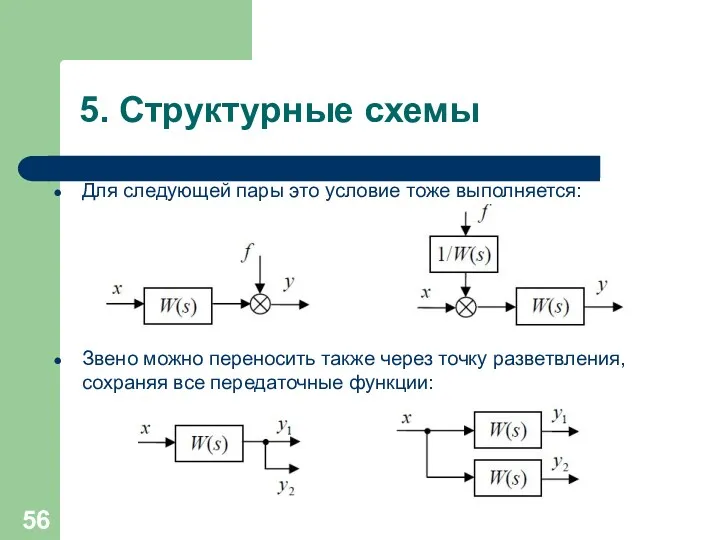
- 56. 5. Структурные схемы Для следующей пары это условие тоже выполняется: Звено можно переносить также через точку
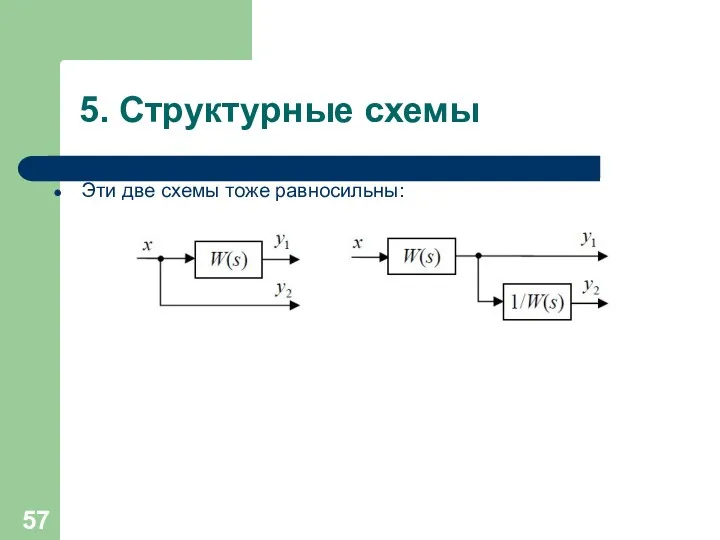
- 57. 5. Структурные схемы Эти две схемы тоже равносильны:
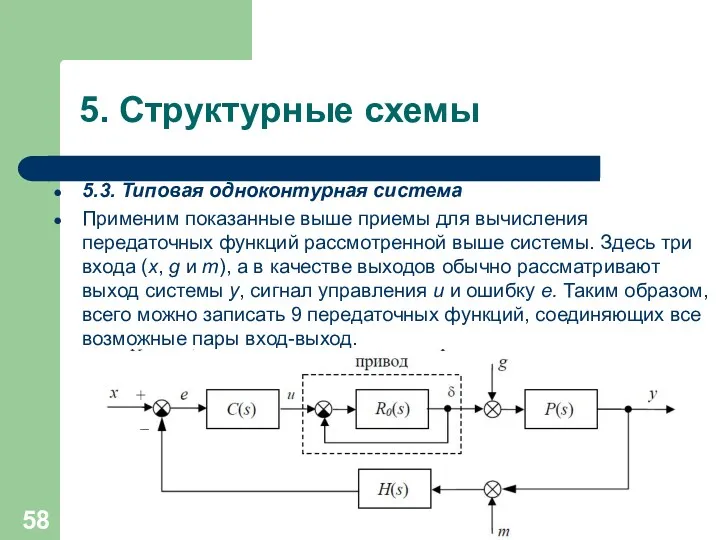
- 58. 5. Структурные схемы 5.3. Типовая одноконтурная система Применим показанные выше приемы для вычисления передаточных функций рассмотренной
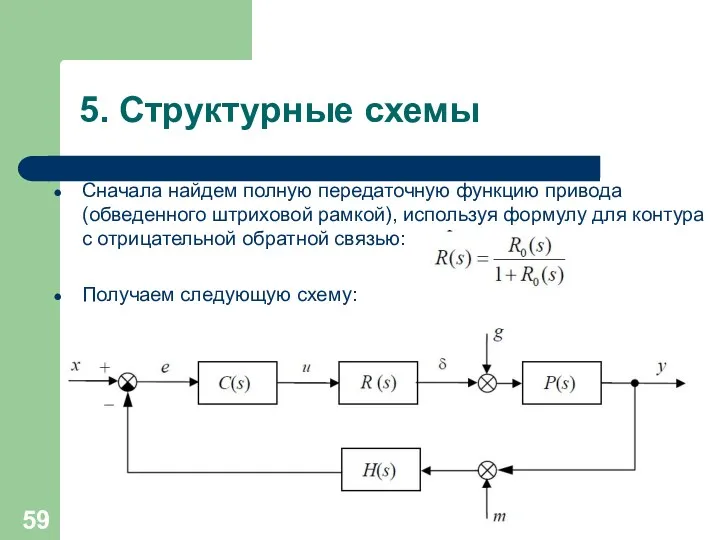
- 59. 5. Структурные схемы Сначала найдем полную передаточную функцию привода (обведенного штриховой рамкой), используя формулу для контура
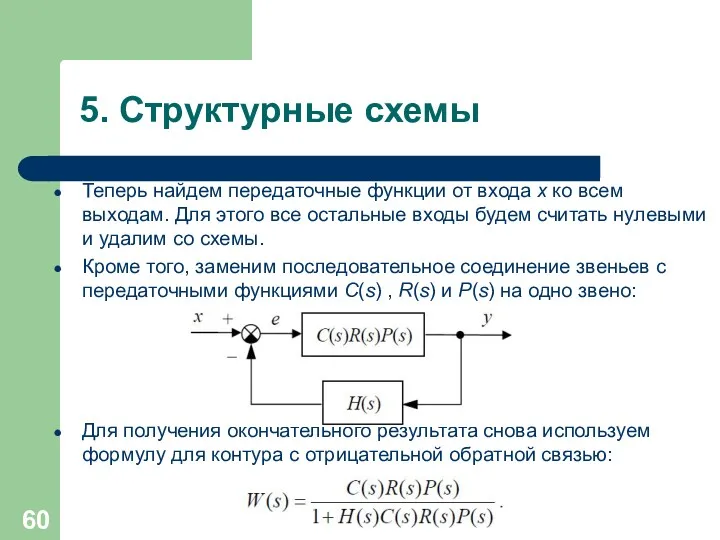
- 60. 5. Структурные схемы Теперь найдем передаточные функции от входа x ко всем выходам. Для этого все
- 62. Скачать презентацию
3. Модели линейных объектов
3.9. Логарифмические частотные характеристики
Частотные характеристики достаточно сложно строить
3. Модели линейных объектов
3.9. Логарифмические частотные характеристики
Частотные характеристики достаточно сложно строить
3. Модели линейных объектов
Вместо A(ω) было предложено использовать логарифмическую амплитудную частотную
3. Модели линейных объектов
Вместо A(ω) было предложено использовать логарифмическую амплитудную частотную
3. Модели линейных объектов
Децибелы - это десять умножить на десятичный логарифм
3. Модели линейных объектов
Децибелы - это десять умножить на десятичный логарифм
3. Модели линейных объектов
Единицей отсчета на логарифмической оси частот является декада
3. Модели линейных объектов
Единицей отсчета на логарифмической оси частот является декада
3. Модели линейных объектов
2) в области высоких и низких частот ЛАЧХ
3. Модели линейных объектов
2) в области высоких и низких частот ЛАЧХ
3. Модели линейных объектов
На рисунке показаны точная (сплошная синяя линия) и
3. Модели линейных объектов
На рисунке показаны точная (сплошная синяя линия) и
3. Модели линейных объектов
Если W(0) = 0 , передаточная функция содержит
3. Модели линейных объектов
Если W(0) = 0 , передаточная функция содержит
4. Типовые динамические звенья
Обычно система управления состоит из отдельных блоков, каждый
4. Типовые динамические звенья
Обычно система управления состоит из отдельных блоков, каждый
4. Типовые динамические звенья
4.1. Усилитель
Звенья, имеющие конечный ненулевой коэффициент усиления постоянного
4. Типовые динамические звенья
4.1. Усилитель
Звенья, имеющие конечный ненулевой коэффициент усиления постоянного
4. Типовые динамические звенья
Если на вход усилителя действует синусоидальный сигнал, на
4. Типовые динамические звенья
Если на вход усилителя действует синусоидальный сигнал, на
4. Типовые динамические звенья
В разд. 3.3 и 3.4 мы уже нашли
4. Типовые динамические звенья
В разд. 3.3 и 3.4 мы уже нашли
4. Типовые динамические звенья
Обратите внимание, что предельное значение переходной характеристики равно
4. Типовые динамические звенья
Обратите внимание, что предельное значение переходной характеристики равно
4. Типовые динамические звенья
Для каждой частоты ω значение W( jω) –
4. Типовые динамические звенья
Для каждой частоты ω значение W( jω) –
4. Типовые динамические звенья
Асимптотическая ЛАЧХ этого звена образована двумя прямыми, которые
4. Типовые динамические звенья
Асимптотическая ЛАЧХ этого звена образована двумя прямыми, которые
4. Типовые динамические звенья
Поскольку ЛАЧХ уменьшается на высоких частотах, апериодическое звено
4. Типовые динамические звенья
Поскольку ЛАЧХ уменьшается на высоких частотах, апериодическое звено
4. Типовые динамические звенья
Поэтому звено названо «неустойчивым»: в покое оно находится
4. Типовые динамические звенья
Поэтому звено названо «неустойчивым»: в покое оно находится
4. Типовые динамические звенья
Из этого графика видно, что ЛАЧХ неустойчивого звена
4. Типовые динамические звенья
Из этого графика видно, что ЛАЧХ неустойчивого звена
4. Типовые динамические звенья
К неминимально-фазовым звеньям относятся все звенья, передаточные функции
4. Типовые динамические звенья
К неминимально-фазовым звеньям относятся все звенья, передаточные функции
4. Типовые динамические звенья
4.3. Колебательное звено
Колебательное звено – это звено второго
4. Типовые динамические звенья
4.3. Колебательное звено
Колебательное звено – это звено второго
4. Типовые динамические звенья
Несложно представить передаточную функцию колебательного звена в форме
где
4. Типовые динамические звенья
Несложно представить передаточную функцию колебательного звена в форме
где
4. Типовые динамические звенья
Колебательное звено относится к позиционным звеньям, его статический
4. Типовые динамические звенья
Колебательное звено относится к позиционным звеньям, его статический
4. Типовые динамические звенья
Колебательное звено относится к позиционным звеньям, его статический
4. Типовые динамические звенья
Колебательное звено относится к позиционным звеньям, его статический
4. Типовые динамические звенья
Асимптотическая ЛАЧХ этого звена образована двумя прямыми, которые
4. Типовые динамические звенья
Асимптотическая ЛАЧХ этого звена образована двумя прямыми, которые
4. Типовые динамические звенья
При значениях ξ < 0,5 ЛАЧХ имеет так
4. Типовые динамические звенья
При значениях ξ < 0,5 ЛАЧХ имеет так
4. Типовые динамические звенья
4.4. Интегрирующее звено
Простейший пример интегрирующего звена – ванна,
4. Типовые динамические звенья
4.4. Интегрирующее звено
Простейший пример интегрирующего звена – ванна,
4. Типовые динамические звенья
Используя это решение для единичного скачка ( x(t)
4. Типовые динамические звенья
Используя это решение для единичного скачка ( x(t)
4. Типовые динамические звенья
Частотная характеристика интегрирующего звена определяется формулой
Можно показать, что
4. Типовые динамические звенья
Частотная характеристика интегрирующего звена определяется формулой
Можно показать, что
4. Типовые динамические звенья
На частоте ω = 1 значение ЛАЧХ равно
4. Типовые динамические звенья
На частоте ω = 1 значение ЛАЧХ равно
4. Типовые динамические звенья
4.5. Дифференцирующие звенья
Дифференцирующее звено дает на выходе производную
4. Типовые динамические звенья
4.5. Дифференцирующие звенья
Дифференцирующее звено дает на выходе производную
4. Типовые динамические звенья
Это физически нереализуемые функции, так как дельта-функцию и
4. Типовые динамические звенья
Это физически нереализуемые функции, так как дельта-функцию и
4. Типовые динамические звенья
Дифференцирующее звено подавляет низкие частоты (производная от постоянного
4. Типовые динамические звенья
Дифференцирующее звено подавляет низкие частоты (производная от постоянного
4. Типовые динамические звенья
В технике не могут использоваться физически нереализуемые звенья.
4. Типовые динамические звенья
В технике не могут использоваться физически нереализуемые звенья.
4. Типовые динамические звенья
Поскольку передаточная функция имеет равные степени числителя и
4. Типовые динамические звенья
Поскольку передаточная функция имеет равные степени числителя и
4. Типовые динамические звенья
4.6. Запаздывание
Представим себе трубу, через которую вентилятор прокачивает
4. Типовые динамические звенья
4.6. Запаздывание
Представим себе трубу, через которую вентилятор прокачивает
4. Типовые динамические звенья
Очевидно, что при изменении температуры воздуха датчик обнаружит
4. Типовые динамические звенья
Очевидно, что при изменении температуры воздуха датчик обнаружит
4. Типовые динамические звенья
Запаздывание в системе просто сдвигает сигнал вправо на
4. Типовые динамические звенья
Запаздывание в системе просто сдвигает сигнал вправо на
4. Типовые динамические звенья
Передаточная функция звена чистого запаздывания равна
Очевидно, что
4. Типовые динамические звенья
Передаточная функция звена чистого запаздывания равна
Очевидно, что
4. Типовые динамические звенья
4.7. «Обратные» звенья
Звено с передаточной функцией
назовем «обратным» звеном
4. Типовые динамические звенья
4.7. «Обратные» звенья
Звено с передаточной функцией
назовем «обратным» звеном
4. Типовые динамические звенья
Для «обратного» звена получим
что после простых преобразований дает
Таким
4. Типовые динамические звенья
Для «обратного» звена получим
что после простых преобразований дает
Таким
4. Типовые динамические звенья
Рассмотрим, например, звено с передаточной функцией W(s) =
4. Типовые динамические звенья
Рассмотрим, например, звено с передаточной функцией W(s) =
4. Типовые динамические звенья
Для звена чистого запаздывания «обратным» будет звено с
4. Типовые динамические звенья
Для звена чистого запаздывания «обратным» будет звено с
4. Типовые динамические звенья
4.8. ЛАФЧХ сложных звеньев
Для построения ЛАФЧХ звеньев со
4. Типовые динамические звенья
4.8. ЛАФЧХ сложных звеньев
Для построения ЛАФЧХ звеньев со
4. Типовые динамические звенья
Представим передаточную функцию в виде произведения
Таким образом, это
4. Типовые динамические звенья
Представим передаточную функцию в виде произведения
Таким образом, это
4. Типовые динамические звенья
На низких частотах, до первой сопрягающей частоты
, «работает»
4. Типовые динамические звенья
На низких частотах, до первой сопрягающей частоты
, «работает»
4. Типовые динамические звенья
Для построения фазовой характеристики желательно использовать компьютерные программы.
4. Типовые динамические звенья
Для построения фазовой характеристики желательно использовать компьютерные программы.
5. Структурные схемы
5.1. Условные обозначения
Систему управления можно разбить на блоки, имеющие
5. Структурные схемы
5.1. Условные обозначения
Систему управления можно разбить на блоки, имеющие
5. Структурные схемы
Строго говоря, есть две формы записи:
• операторная запись, когда
5. Структурные схемы
Строго говоря, есть две формы записи:
• операторная запись, когда
5. Структурные схемы
Для суммирующих элементов используют специальное обозначение – круг, разбитый
5. Структурные схемы
Для суммирующих элементов используют специальное обозначение – круг, разбитый
5. Структурные схемы
На следующем рисунке показана типичная схема системы управления кораблем
5. Структурные схемы
На следующем рисунке показана типичная схема системы управления кораблем
5. Структурные схемы
В системе управления курса кроме «большого» контура управления (регулятор
5. Структурные схемы
В системе управления курса кроме «большого» контура управления (регулятор
5. Структурные схемы
Легко показать, что передаточные функции параллельного и последовательного соединений
5. Структурные схемы
Легко показать, что передаточные функции параллельного и последовательного соединений
5. Структурные схемы
а для последовательного
Для контура с отрицательной обратной связью имеем
Для
5. Структурные схемы
а для последовательного
Для контура с отрицательной обратной связью имеем
Для
5. Структурные схемы
Перенося X (s) в левую часть, получаем
Если обратная связь
5. Структурные схемы
Перенося X (s) в левую часть, получаем
Если обратная связь
5. Структурные схемы
Звено можно переносить через сумматор как вперед, так и
5. Структурные схемы
Звено можно переносить через сумматор как вперед, так и
5. Структурные схемы
Для следующей пары это условие тоже выполняется:
Звено можно переносить
5. Структурные схемы
Для следующей пары это условие тоже выполняется:
Звено можно переносить
5. Структурные схемы
Эти две схемы тоже равносильны:
5. Структурные схемы
Эти две схемы тоже равносильны:
5. Структурные схемы
5.3. Типовая одноконтурная система
Применим показанные выше приемы для вычисления
5. Структурные схемы
5.3. Типовая одноконтурная система
Применим показанные выше приемы для вычисления
5. Структурные схемы
Сначала найдем полную передаточную функцию привода (обведенного штриховой рамкой),
5. Структурные схемы
Сначала найдем полную передаточную функцию привода (обведенного штриховой рамкой),
5. Структурные схемы
Теперь найдем передаточные функции от входа x ко всем
5. Структурные схемы
Теперь найдем передаточные функции от входа x ко всем
 Динамика вращательного движения твердого тела. Основное уравнение динамики вращательного движения. Момент инерции твердого тела
Динамика вращательного движения твердого тела. Основное уравнение динамики вращательного движения. Момент инерции твердого тела Волновые явления вблизи границы раздела сред. Плоские ЭВМ в неограниченных средах. Лекция 9
Волновые явления вблизи границы раздела сред. Плоские ЭВМ в неограниченных средах. Лекция 9 Moire thread counter
Moire thread counter Электромагнитное поле. Электромагнитные волны
Электромагнитное поле. Электромагнитные волны ИКТ как средство повышения эффективности урока
ИКТ как средство повышения эффективности урока Закон отражения света
Закон отражения света Інерціальні системи відліку. Перший закон Ньютона
Інерціальні системи відліку. Перший закон Ньютона Электромагниттік өрістегі зарядталған бөлшектердің қозғалысы
Электромагниттік өрістегі зарядталған бөлшектердің қозғалысы Кинематика
Кинематика Презентация к уроку физики в 7 классе по теме Сообщающиеся сосуды
Презентация к уроку физики в 7 классе по теме Сообщающиеся сосуды Соотношение неопределённостей Гейзенберга. Волновая функция и её статистический смысл
Соотношение неопределённостей Гейзенберга. Волновая функция и её статистический смысл Влияние электромагнитного поля на окружающую среду и человека. 8 класс
Влияние электромагнитного поля на окружающую среду и человека. 8 класс Момент імпульсу.Закон збереження момента імпульсу
Момент імпульсу.Закон збереження момента імпульсу Основы радиационной дозиметрии
Основы радиационной дозиметрии Графические задачи по теме Движение тел по наклонной плоскости
Графические задачи по теме Движение тел по наклонной плоскости Расчет давления на дно и стенки сосуда. 7 класс
Расчет давления на дно и стенки сосуда. 7 класс Теплопроводность. Основные положения теории теплопроводности. (Тема 4. Лекции 14,15)
Теплопроводность. Основные положения теории теплопроводности. (Тема 4. Лекции 14,15) Проект Волшебный мир зазеркалья. Свойства зеркала
Проект Волшебный мир зазеркалья. Свойства зеркала Задачи на смеси, сплавы и растворы
Задачи на смеси, сплавы и растворы Общие свойства и характеристики волновых процессов
Общие свойства и характеристики волновых процессов Кривошипно-шатунный механизм
Кривошипно-шатунный механизм Adaptive response of metal-oxide memristive nanostructures to periodic electric stimulation
Adaptive response of metal-oxide memristive nanostructures to periodic electric stimulation Простые механизмы
Простые механизмы Дыбыс күшейту аппараттуралары
Дыбыс күшейту аппараттуралары Електродинаміка
Електродинаміка Капиллярные явления. Формула Жюрена
Капиллярные явления. Формула Жюрена Давление газов. Закон Паскаля
Давление газов. Закон Паскаля Использование игровых элементов на уроках физики. Номинация Моя лучшая презентация
Использование игровых элементов на уроках физики. Номинация Моя лучшая презентация