- Tranlational equilibrium

Содержание
- 2. Objectives Describe with examples Newton’s three laws of motion. Describe with examples the first condition for
- 3. Newton’s First Law Newton’s First Law: An object at rest or an object in motion at
- 4. Newton’s Second Law: Second Law: Whenever a resultant force acts on an object, it produces an
- 5. Newton’s Third Law To every action force there must be an equal and opposite reaction force.
- 6. Newton’s Third Law Examples: Action and Reaction Forces Act on Different Objects. They Do Not Cancel
- 7. Translational Equilibrium An object is said to be in Translational Equilibrium if and only if there
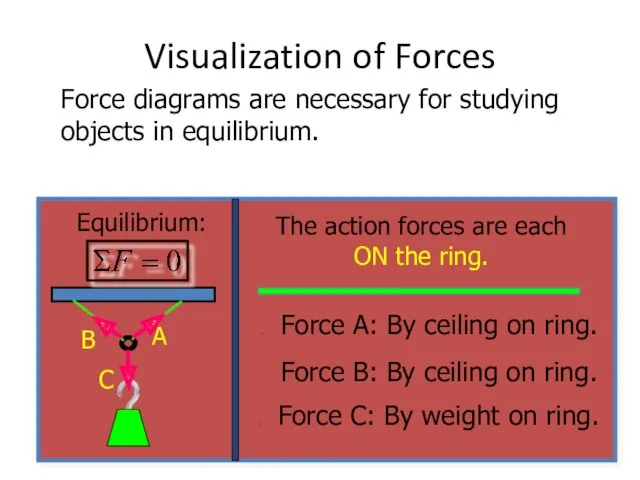
- 8. Visualization of Forces Force diagrams are necessary for studying objects in equilibrium. The action forces are
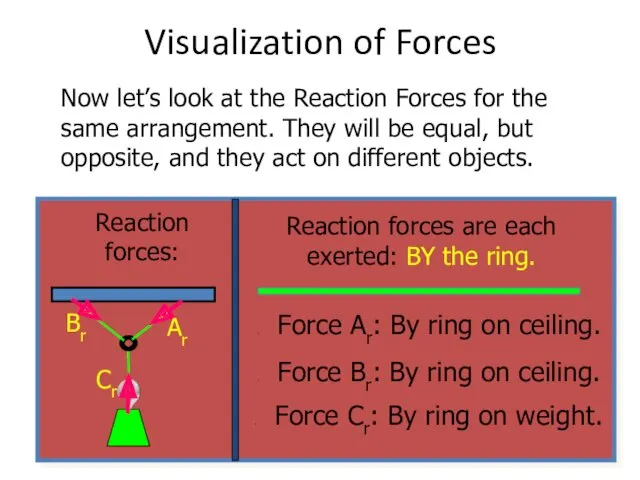
- 9. Visualization of Forces Now let’s look at the Reaction Forces for the same arrangement. They will
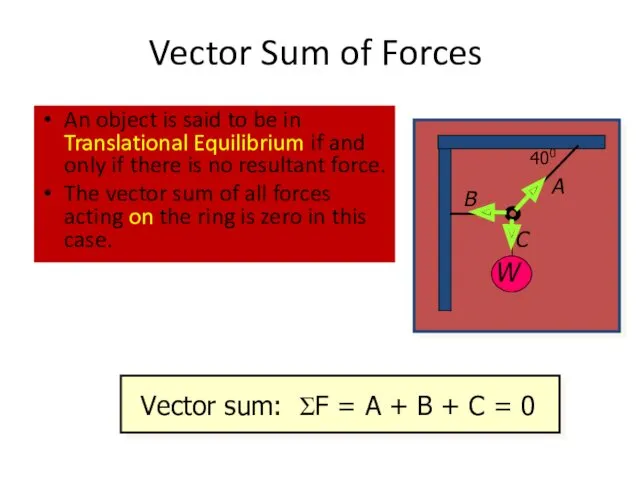
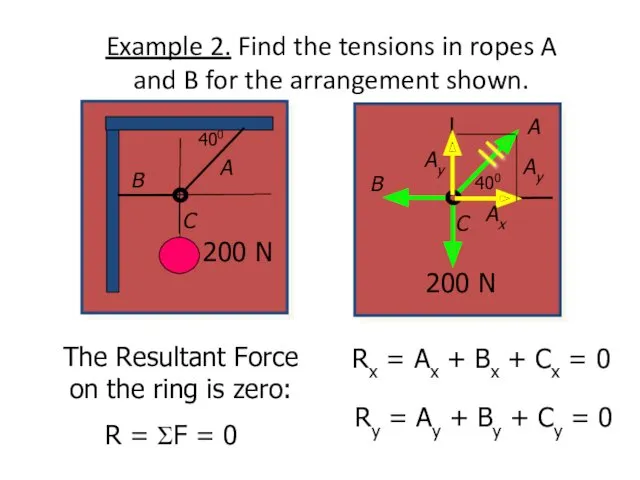
- 10. Vector Sum of Forces An object is said to be in Translational Equilibrium if and only
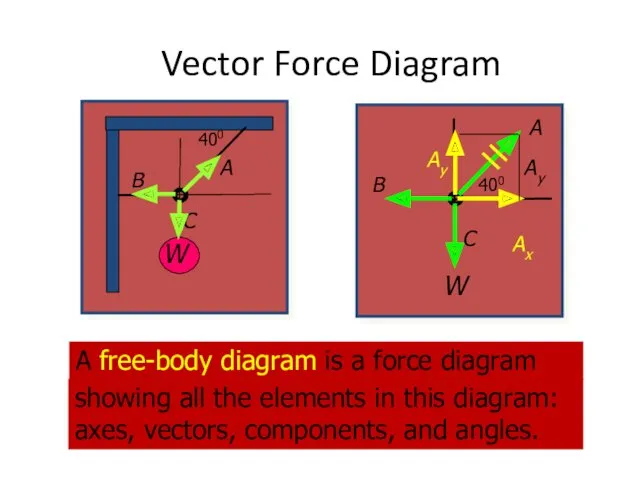
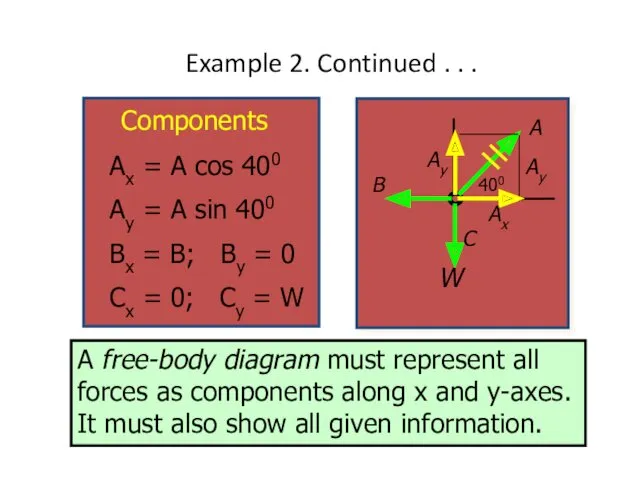
- 11. Vector Force Diagram W 400 A B C Ax Ay A free-body diagram is a force
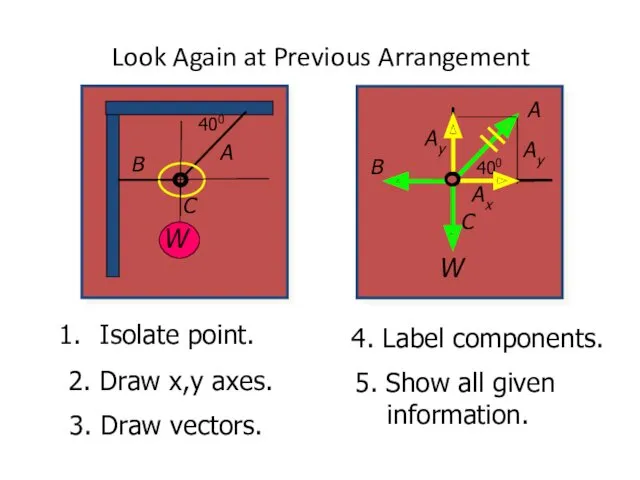
- 12. Look Again at Previous Arrangement Isolate point. 2. Draw x,y axes. 3. Draw vectors. 4. Label
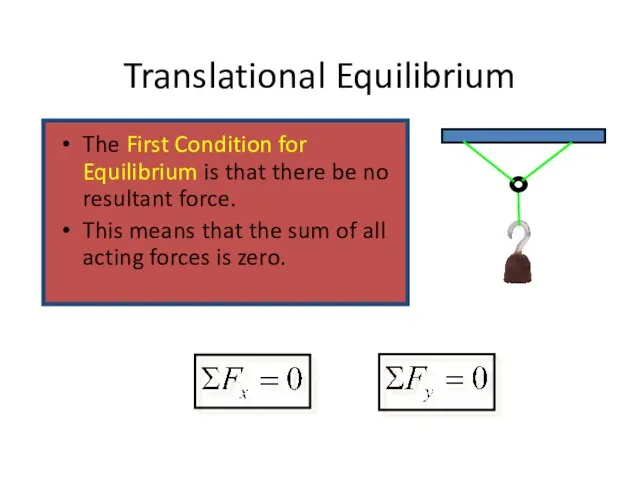
- 13. Translational Equilibrium The First Condition for Equilibrium is that there be no resultant force. This means
- 14. Example 2. Find the tensions in ropes A and B for the arrangement shown. Rx =
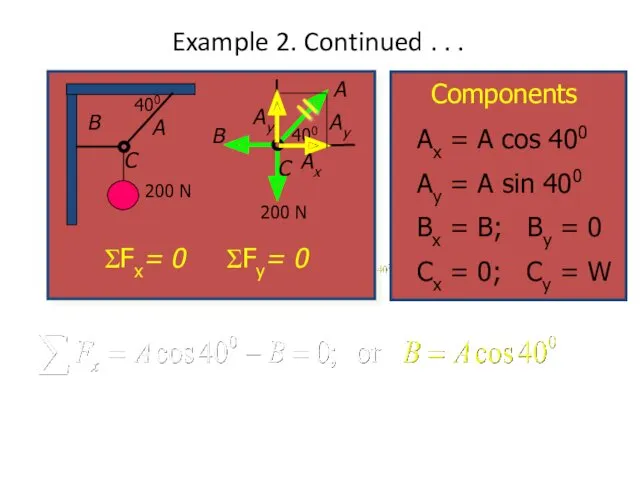
- 15. Example 2. Continued . . . A free-body diagram must represent all forces as components along
- 16. Example 2. Continued . . . ΣFx= 0 ΣFy= 0
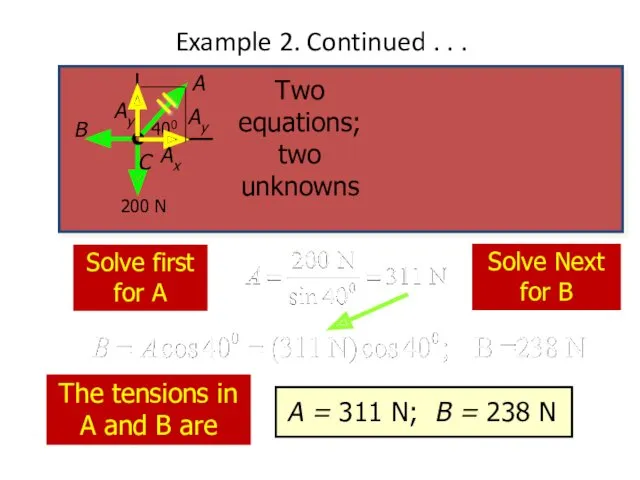
- 17. Example 2. Continued . . . Solve first for A Solve Next for B The tensions
- 18. Problem Solving Strategy Draw a sketch and label all information. Draw a free-body diagram. Find components
- 19. Example 3. Find Tension in Ropes A and B. 300 600 A B 400 N 1.
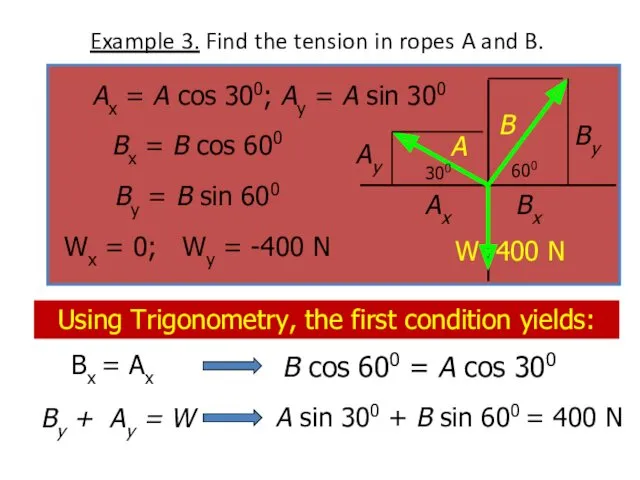
- 20. Example 3. Find the tension in ropes A and B. ΣFx = Bx - Ax =
- 21. Example 3. Find the tension in ropes A and B. Bx = Ax By + Ay
- 22. Example 3 (Cont.) Find the tension in A and B. B = 1.732 A We will
- 23. Example 3 (Cont.) Find Tensions in A and B. A sin 300 + B sin 600
- 24. Example 3 (Cont.) Find B with A = 200 N. Rope tensions are: A = 200
- 25. Example 4. Rotate axes for same example. We recognize that A and B are at right
- 26. Since A and B are perpendicular, we can find the new angle φ from geometry. 600
- 27. Apply the first condition for Equilibrium, and . . . Wx = (400 N) cos 300
- 28. Example 4 (Cont.) We Now Solve for A and B: ΣFx = B - Wx =
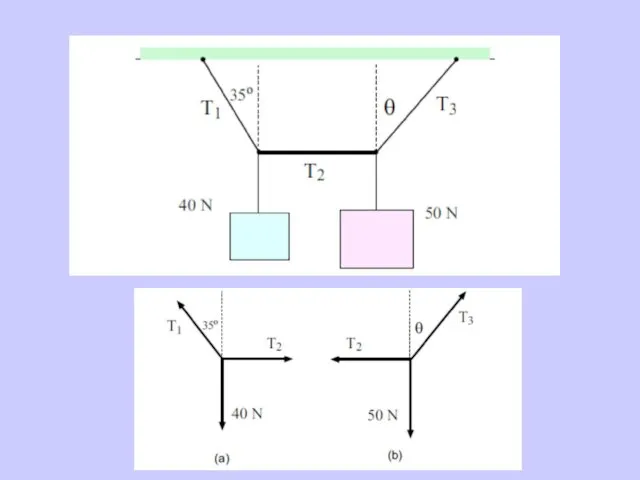
- 29. Calculate Angle θ
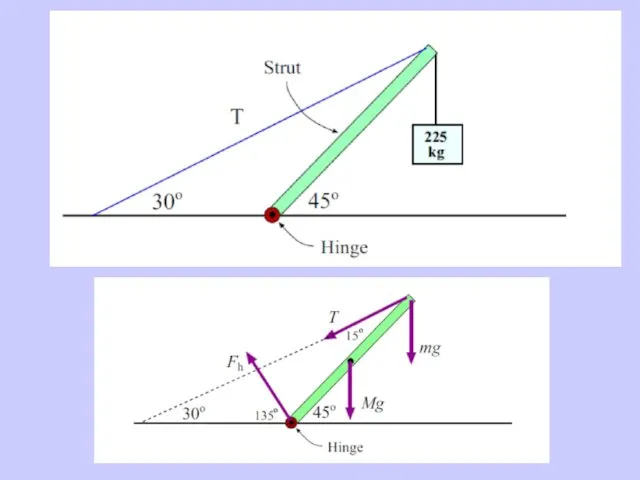
- 31. Calculate Reaction Force on the Hinge
- 33. Summary Newton’s First Law: An object at rest or an object in motion at constant speed
- 34. Summary Second Law: Whenever a resultant force acts on an object, it produces an acceleration, an
- 35. Summary Third Law: To every action force there must be an equal and opposite reaction force.
- 36. Problem Solving Strategy Draw a sketch and label all information. Draw a free-body diagram. Find components
- 37. Friction and Equilibrium
- 38. Objectives Define and calculate the coefficients of kinetic and static friction, and give the relationship of
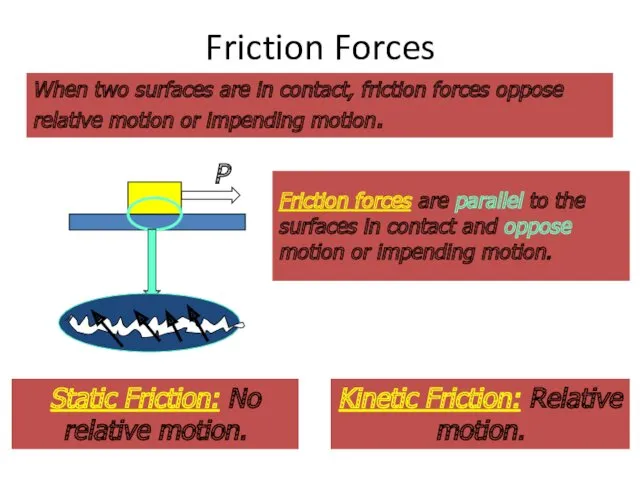
- 39. Friction Forces When two surfaces are in contact, friction forces oppose relative motion or impending motion.
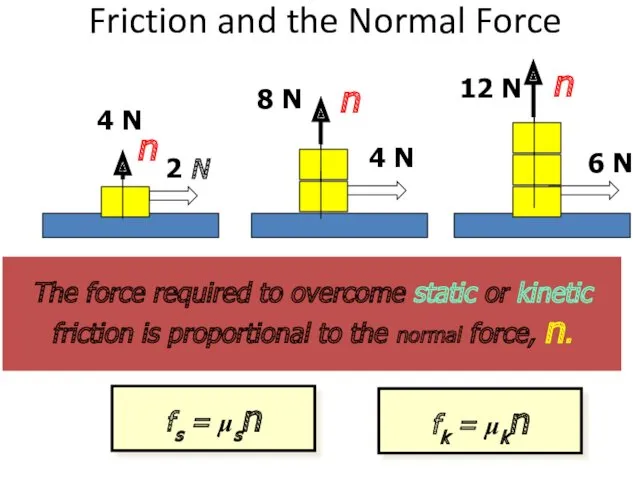
- 40. Friction and the Normal Force The force required to overcome static or kinetic friction is proportional
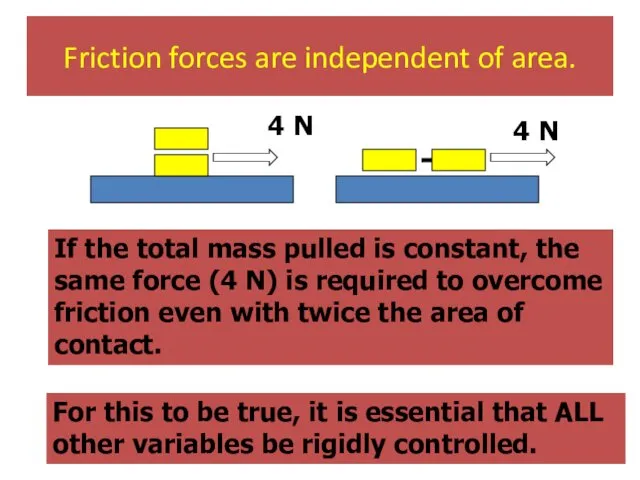
- 41. Friction forces are independent of area. If the total mass pulled is constant, the same force
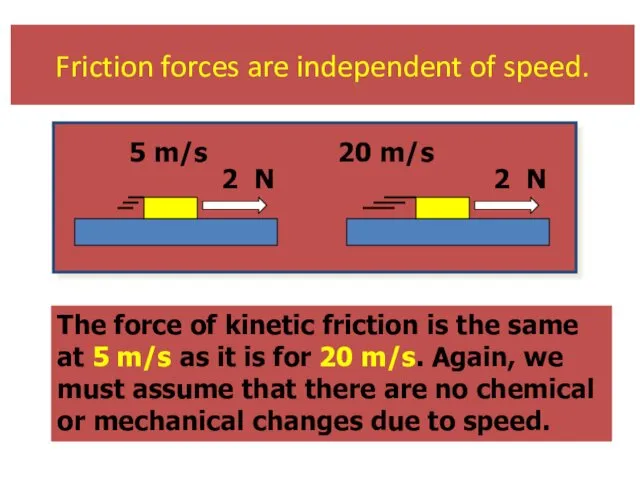
- 42. Friction forces are independent of speed. The force of kinetic friction is the same at 5
- 43. The Static Friction Force
- 44. Constant or Impending Motion Here the weight and normal forces are balanced and do not affect
- 45. Friction and Acceleration Note that the kinetic friction force remains constant even as the velocity increases.
- 46. EXAMPLE 1: If μk = 0.3 and μs = 0.5, what horizontal pull P is required
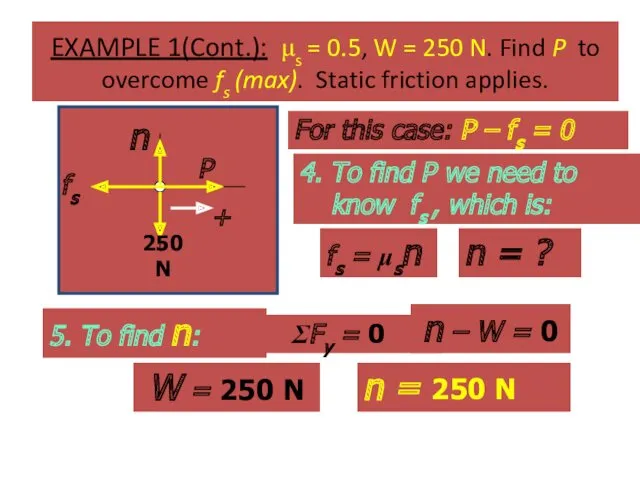
- 47. EXAMPLE 1(Cont.): μs = 0.5, W = 250 N. Find P to overcome fs (max). Static
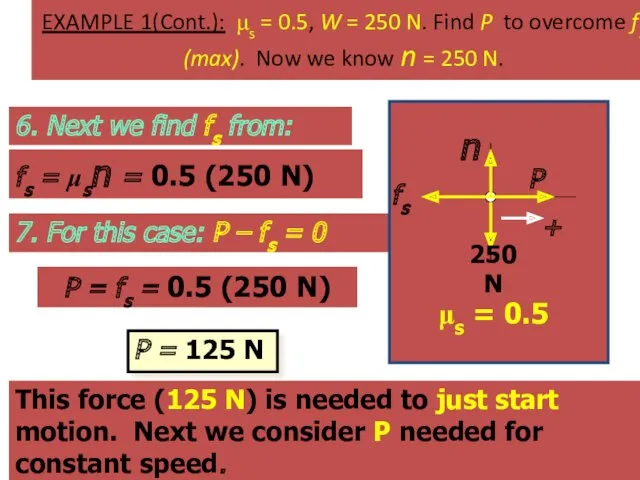
- 48. EXAMPLE 1(Cont.): μs = 0.5, W = 250 N. Find P to overcome fs (max). Now
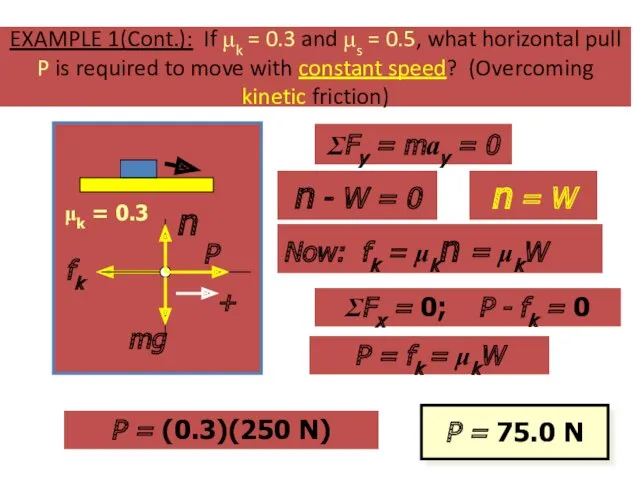
- 49. EXAMPLE 1(Cont.): If μk = 0.3 and μs = 0.5, what horizontal pull P is required
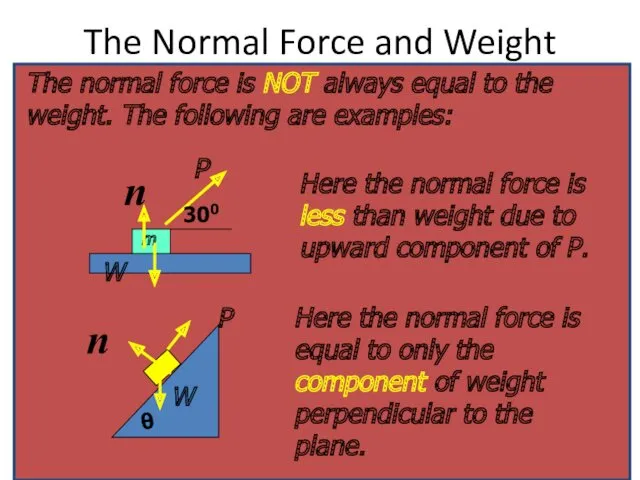
- 50. The Normal Force and Weight
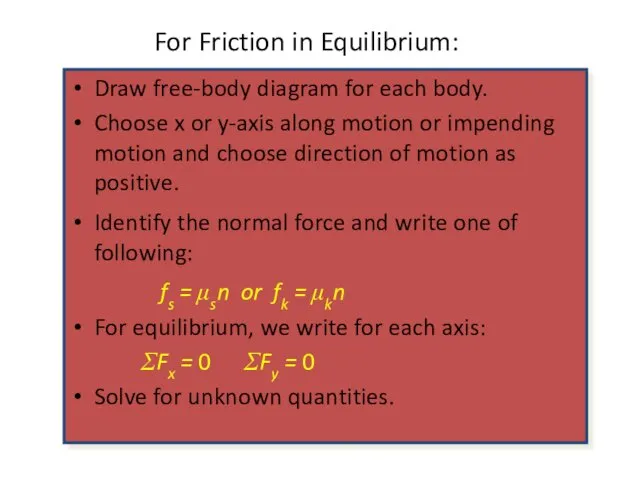
- 51. For Friction in Equilibrium: Draw free-body diagram for each body. Choose x or y-axis along motion
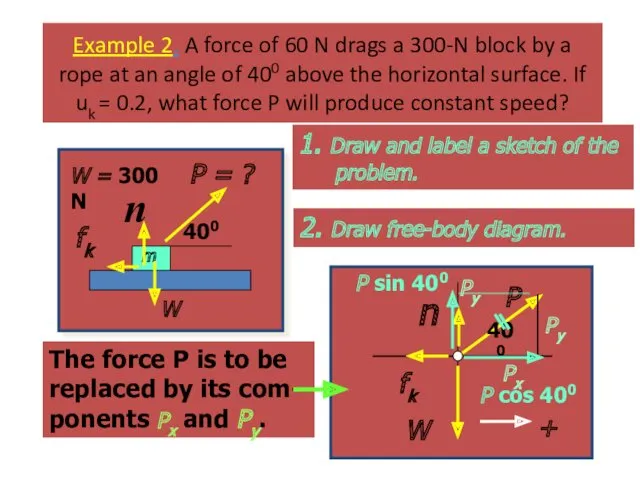
- 52. m Example 2. A force of 60 N drags a 300-N block by a rope at
- 53. Example 2 (Cont.). P = ?; W = 300 N; uk = 0.2. 3. Find components
- 54. Example 2 (Cont.). P = ?; W = 300 N; uk = 0.2. 4. Apply Equilibrium
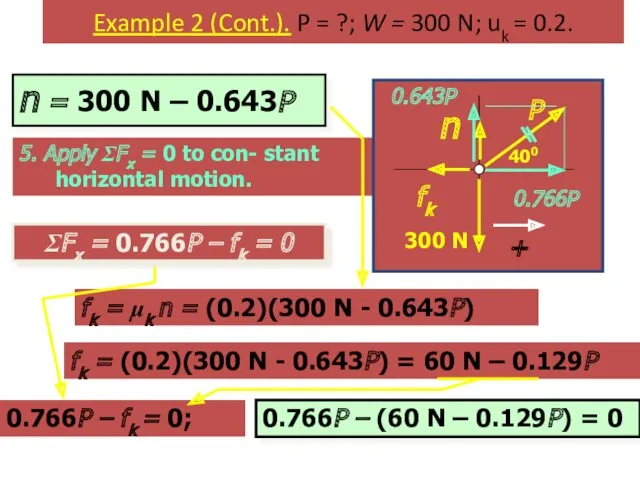
- 55. Example 2 (Cont.). P = ?; W = 300 N; uk = 0.2. 5. Apply ΣFx
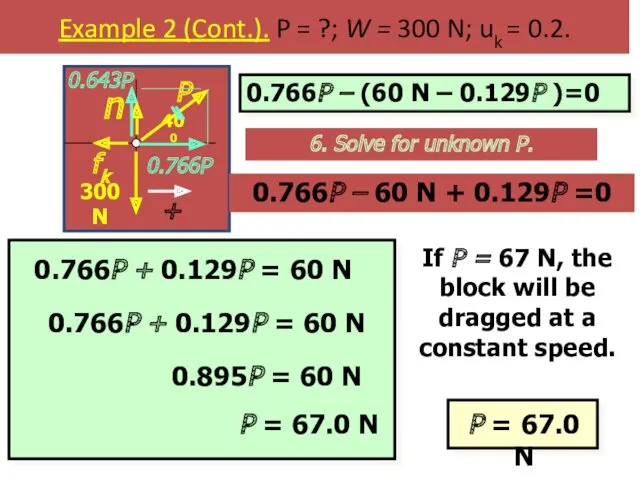
- 56. Example 2 (Cont.). P = ?; W = 300 N; uk = 0.2. 6. Solve for
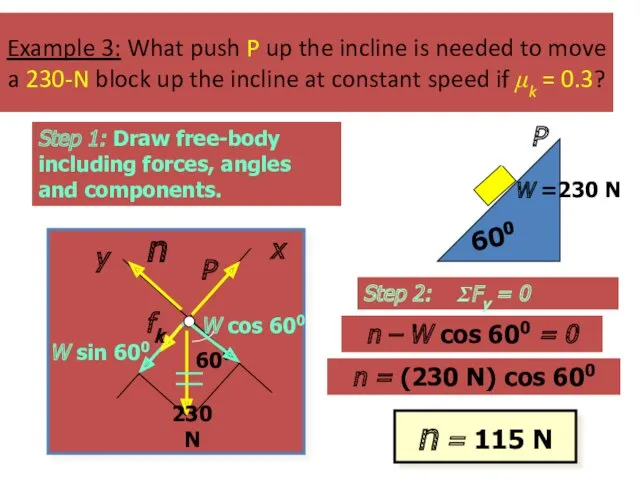
- 57. Example 3: What push P up the incline is needed to move a 230-N block up
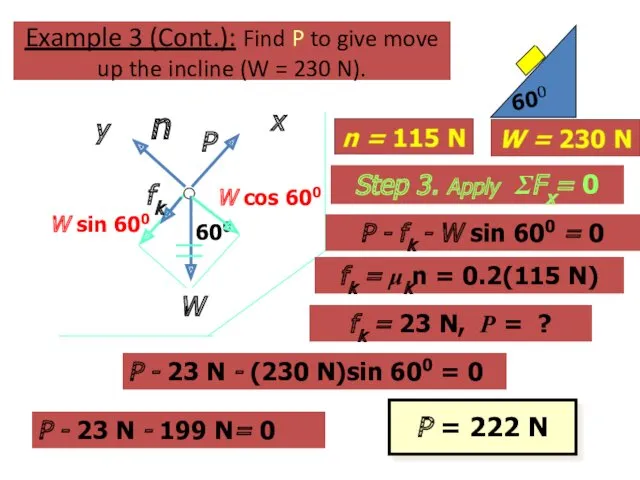
- 58. Example 3 (Cont.): Find P to give move up the incline (W = 230 N). Step
- 59. Summary Equilibrium exists at that instant:
- 60. Summary: Important Points (Cont.) Equilibrium exists if speed is constant, but fk does not get larger
- 61. Summary: Important Points (Cont.) The ΣF will be zero along the x-axis and along the y-axis.
- 62. Summary It is necessary to draw the free-body diagram and sum forces to solve for the
- 64. Скачать презентацию
Objectives
Describe with examples Newton’s three laws of motion.
Describe with examples the
Objectives
Describe with examples Newton’s three laws of motion.
Describe with examples the
Newton’s First Law
Newton’s First Law: An object at rest or an
Newton’s First Law
Newton’s First Law: An object at rest or an
Newton’s Second Law:
Second Law: Whenever a resultant force acts on an
Newton’s Second Law:
Second Law: Whenever a resultant force acts on an
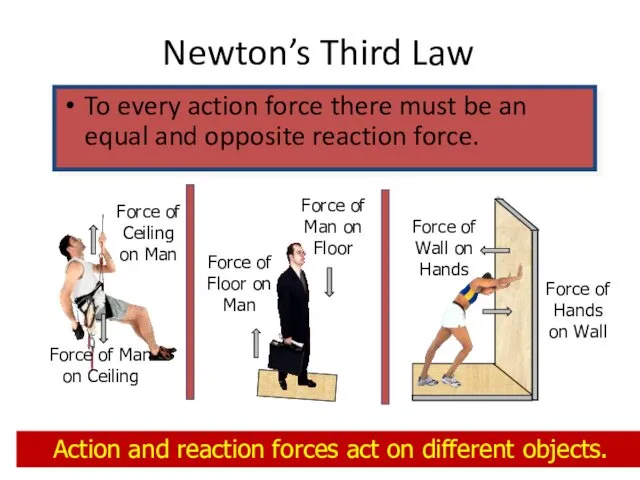
Newton’s Third Law
To every action force there must be an equal
Newton’s Third Law
To every action force there must be an equal
Newton’s Third Law
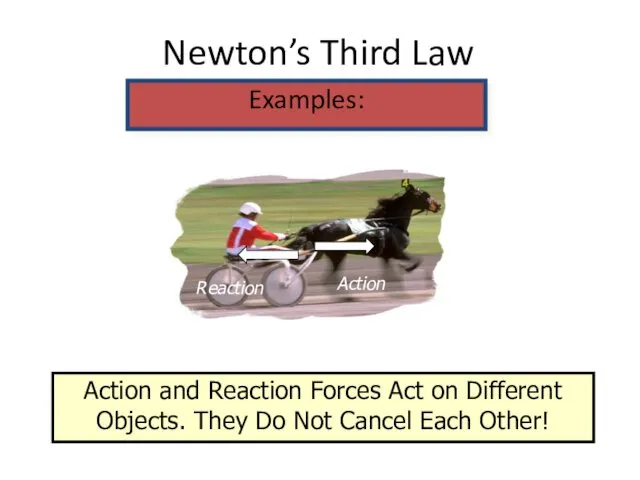
Examples:
Action and Reaction Forces Act on Different Objects. They
Newton’s Third Law
Examples:
Action and Reaction Forces Act on Different Objects. They
Translational Equilibrium
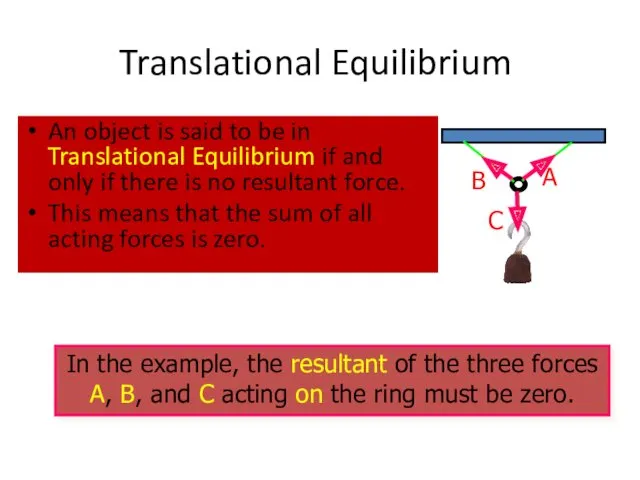
An object is said to be in Translational Equilibrium if
Translational Equilibrium
An object is said to be in Translational Equilibrium if
Visualization of Forces
Force diagrams are necessary for studying objects in equilibrium.
Visualization of Forces
Force diagrams are necessary for studying objects in equilibrium.
Visualization of Forces
Now let’s look at the Reaction Forces for the
Visualization of Forces
Now let’s look at the Reaction Forces for the
Vector Sum of Forces
An object is said to be in Translational
Vector Sum of Forces
An object is said to be in Translational
Vector Force Diagram
W
400
A
B
C
Ax
Ay
A free-body diagram is a force diagram
Ay
showing all the
Vector Force Diagram
W
400
A
B
C
Ax
Ay
A free-body diagram is a force diagram
Ay
showing all the
Look Again at Previous Arrangement
Isolate point.
2. Draw x,y axes.
3. Draw vectors.
4.
Look Again at Previous Arrangement
Isolate point.
2. Draw x,y axes.
3. Draw vectors.
4.
Translational Equilibrium
The First Condition for Equilibrium is that there be no
Translational Equilibrium
The First Condition for Equilibrium is that there be no
Example 2. Find the tensions in ropes A and B for
Example 2. Find the tensions in ropes A and B for
Example 2. Continued . . .
A free-body diagram must represent all
Example 2. Continued . . .
A free-body diagram must represent all
Example 2. Continued . . .
ΣFx= 0 ΣFy= 0
Example 2. Continued . . .
ΣFx= 0 ΣFy= 0
Example 2. Continued . . .
Solve first for A
Solve Next for
Example 2. Continued . . .
Solve first for A
Solve Next for
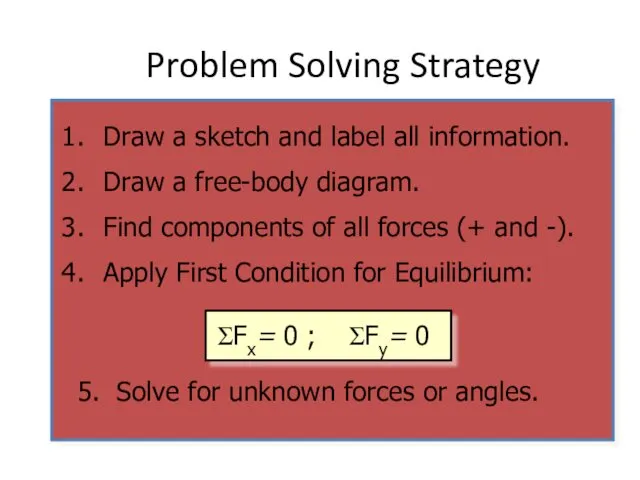
Problem Solving Strategy
Draw a sketch and label all information.
Draw a free-body
Problem Solving Strategy
Draw a sketch and label all information.
Draw a free-body
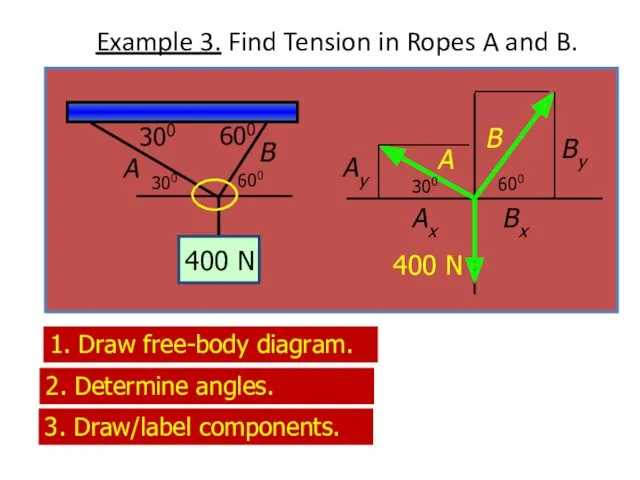
Example 3. Find Tension in Ropes A and B.
300
600
A
B
400 N
1. Draw
Example 3. Find Tension in Ropes A and B.
300
600
A
B
400 N
1. Draw
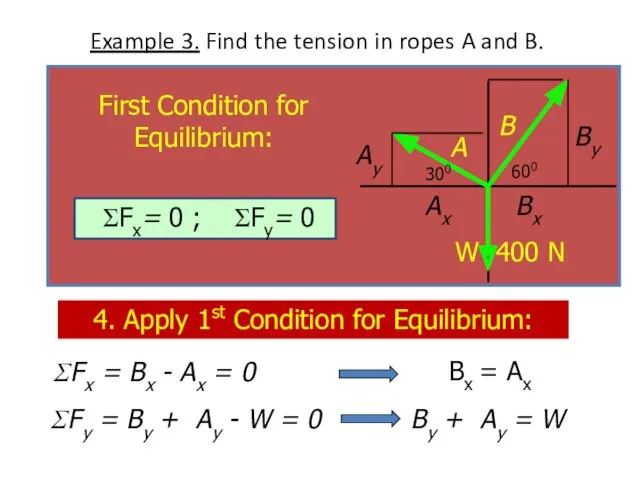
Example 3. Find the tension in ropes A and B.
ΣFx =
Example 3. Find the tension in ropes A and B.
ΣFx =
Example 3. Find the tension in ropes A and B.
Bx =
Example 3. Find the tension in ropes A and B.
Bx =
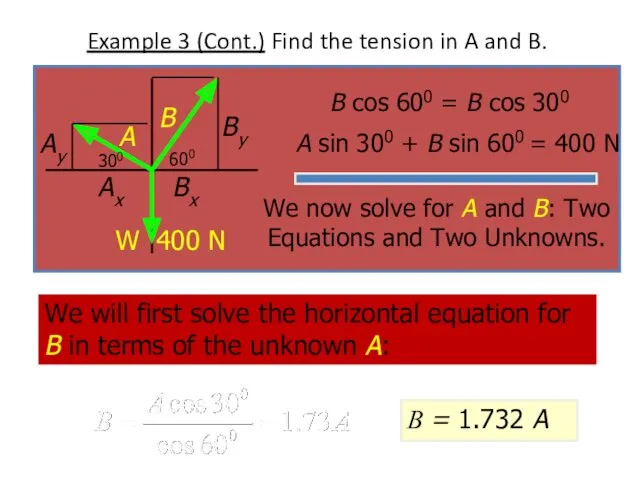
Example 3 (Cont.) Find the tension in A and B.
B =
Example 3 (Cont.) Find the tension in A and B.
B =
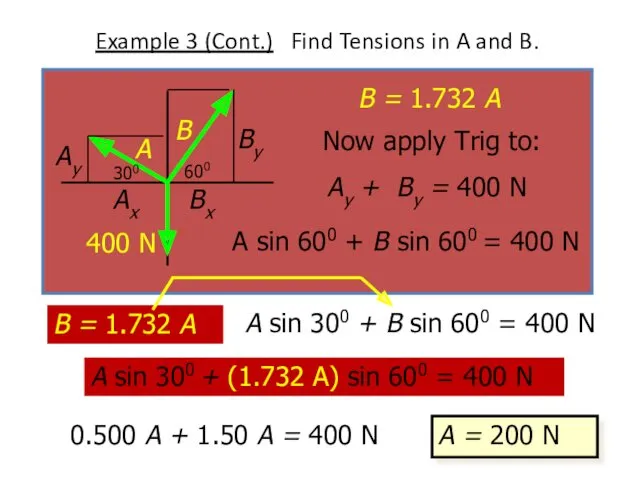
Example 3 (Cont.) Find Tensions in A and B.
A sin
Example 3 (Cont.) Find Tensions in A and B.
A sin
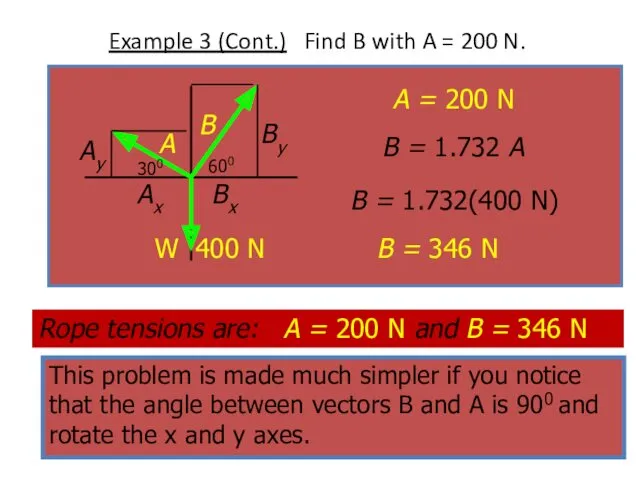
Example 3 (Cont.) Find B with A = 200 N.
Rope tensions
Example 3 (Cont.) Find B with A = 200 N.
Rope tensions
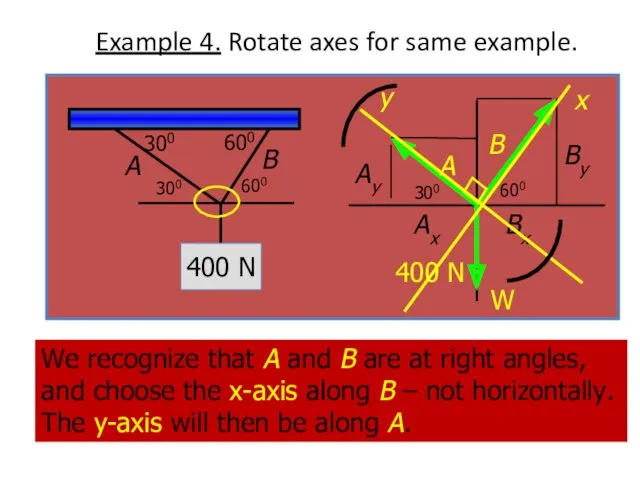
Example 4. Rotate axes for same example.
We recognize that A and
Example 4. Rotate axes for same example.
We recognize that A and
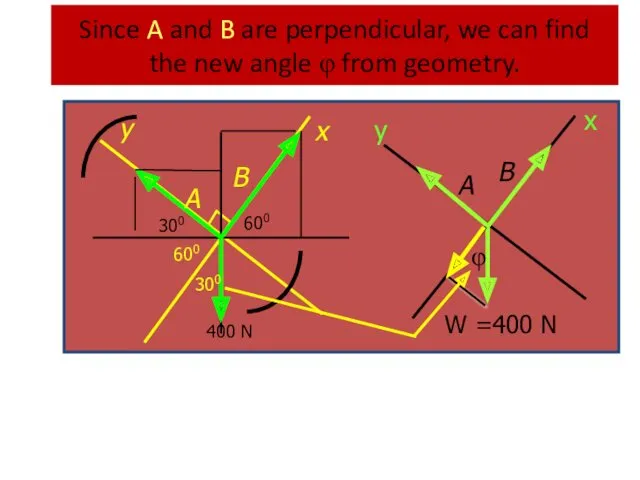
Since A and B are perpendicular, we can find the new
Since A and B are perpendicular, we can find the new
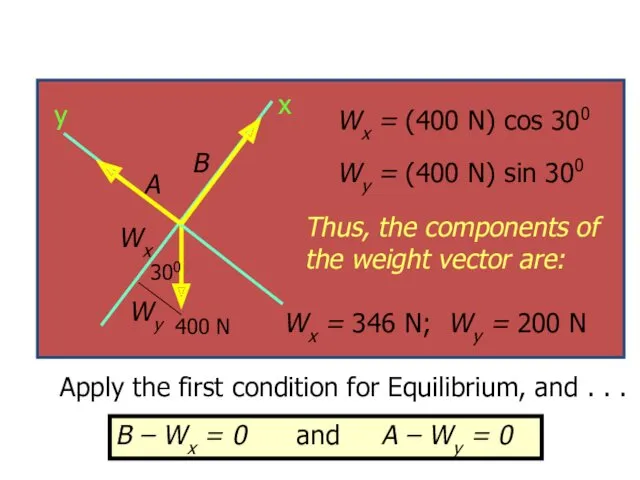
Apply the first condition for Equilibrium, and . . .
Wx
Apply the first condition for Equilibrium, and . . .
Wx
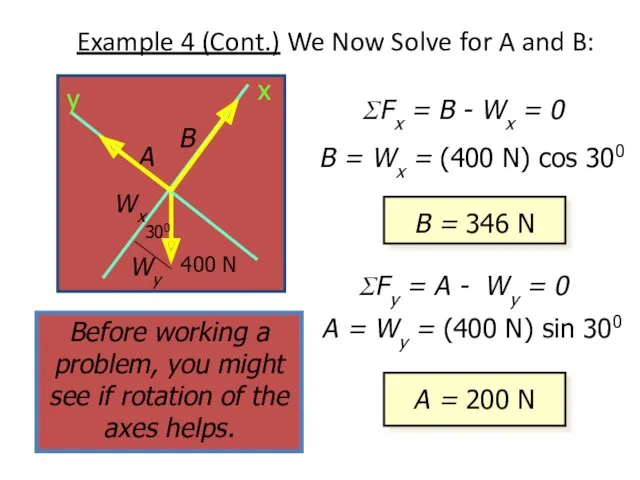
Example 4 (Cont.) We Now Solve for A and B:
ΣFx =
Example 4 (Cont.) We Now Solve for A and B:
ΣFx =
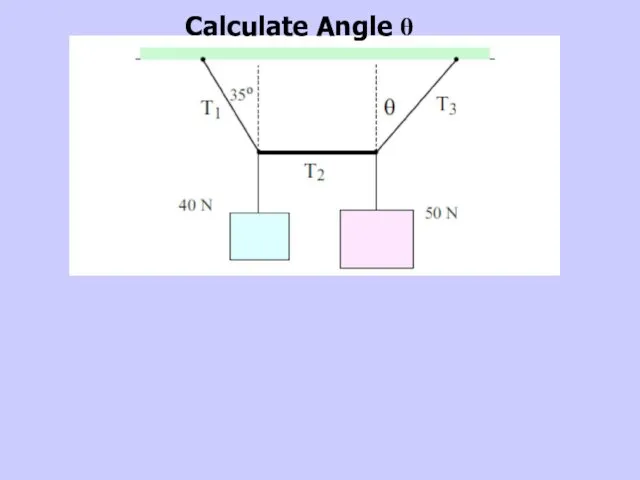
Calculate Angle θ
Calculate Angle θ
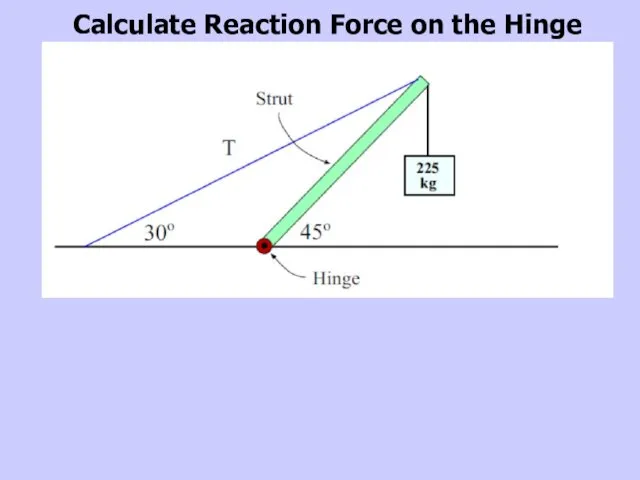
Calculate Reaction Force on the Hinge
Calculate Reaction Force on the Hinge

Summary
Newton’s First Law: An object at rest or an object in
Summary
Newton’s First Law: An object at rest or an object in
Summary
Second Law: Whenever a resultant force acts on an object, it
Summary
Second Law: Whenever a resultant force acts on an object, it
Summary
Third Law: To every action force there must be an equal
Summary
Third Law: To every action force there must be an equal
Problem Solving Strategy
Draw a sketch and label all information.
Draw a free-body
Problem Solving Strategy
Draw a sketch and label all information.
Draw a free-body
Friction and Equilibrium
Friction and Equilibrium
Objectives
Define and calculate the coefficients of kinetic and static friction, and
Objectives
Define and calculate the coefficients of kinetic and static friction, and
Friction Forces
When two surfaces are in contact, friction forces oppose relative
Friction Forces
When two surfaces are in contact, friction forces oppose relative
Friction and the Normal Force
The force required to overcome static or
Friction and the Normal Force
The force required to overcome static or
Friction forces are independent of area.
If the total mass pulled is
Friction forces are independent of area.
If the total mass pulled is
Friction forces are independent of speed.
The force of kinetic friction is
Friction forces are independent of speed.
The force of kinetic friction is
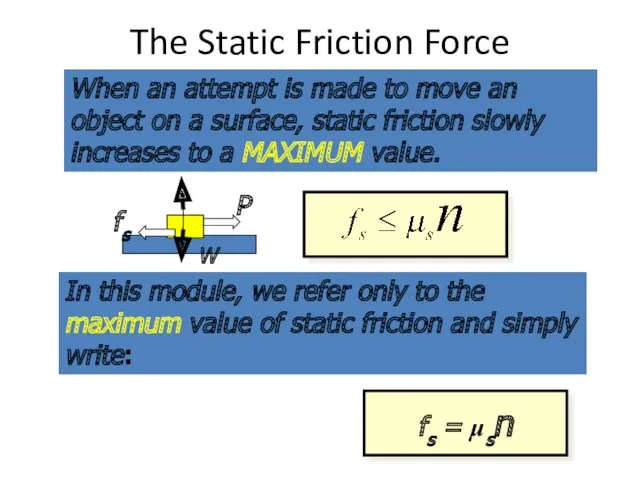
The Static Friction Force
The Static Friction Force
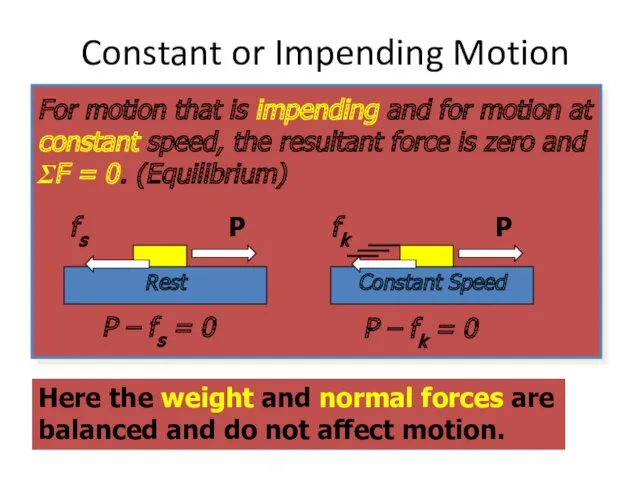
Constant or Impending Motion
Here the weight and normal forces are balanced
Constant or Impending Motion
Here the weight and normal forces are balanced
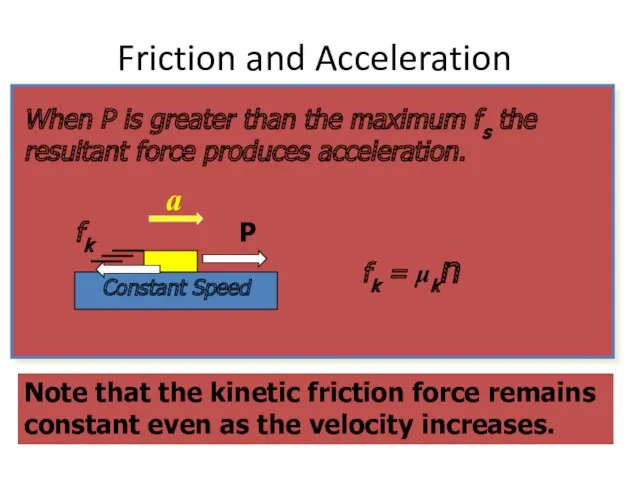
Friction and Acceleration
Note that the kinetic friction force remains constant even
Friction and Acceleration
Note that the kinetic friction force remains constant even
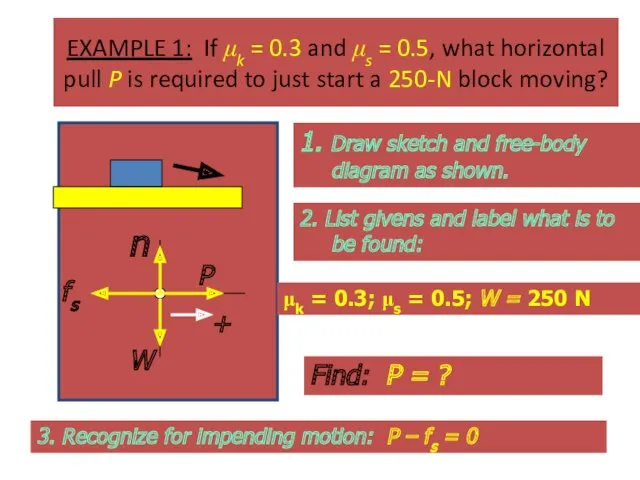
EXAMPLE 1: If μk = 0.3 and μs = 0.5, what
EXAMPLE 1: If μk = 0.3 and μs = 0.5, what
EXAMPLE 1(Cont.): μs = 0.5, W = 250 N. Find P
EXAMPLE 1(Cont.): μs = 0.5, W = 250 N. Find P
EXAMPLE 1(Cont.): μs = 0.5, W = 250 N. Find P
EXAMPLE 1(Cont.): μs = 0.5, W = 250 N. Find P
EXAMPLE 1(Cont.): If μk = 0.3 and μs = 0.5, what
EXAMPLE 1(Cont.): If μk = 0.3 and μs = 0.5, what
The Normal Force and Weight
The Normal Force and Weight
For Friction in Equilibrium:
Draw free-body diagram for each body.
Choose x or
For Friction in Equilibrium:
Draw free-body diagram for each body.
Choose x or
m
Example 2. A force of 60 N drags a 300-N block
m
Example 2. A force of 60 N drags a 300-N block
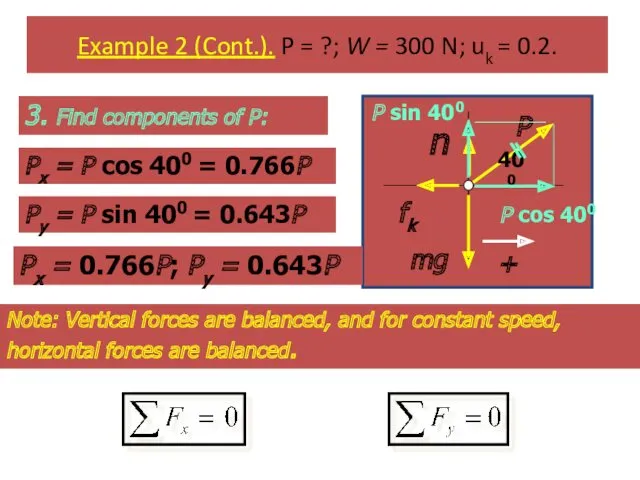
Example 2 (Cont.). P = ?; W = 300 N; uk
Example 2 (Cont.). P = ?; W = 300 N; uk
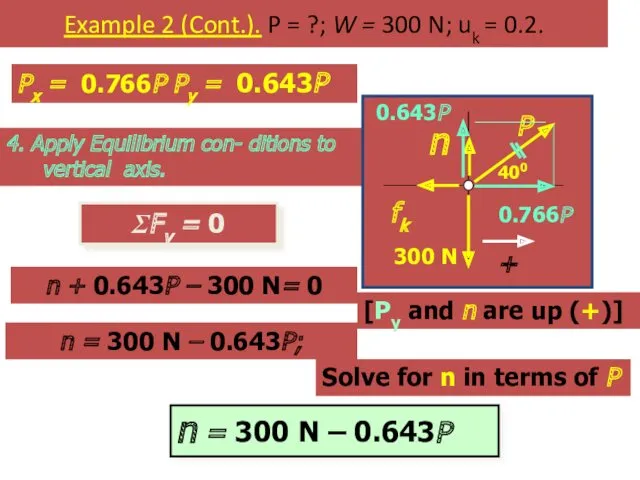
Example 2 (Cont.). P = ?; W = 300 N; uk
Example 2 (Cont.). P = ?; W = 300 N; uk
Example 2 (Cont.). P = ?; W = 300 N; uk
Example 2 (Cont.). P = ?; W = 300 N; uk
Example 2 (Cont.). P = ?; W = 300 N; uk
Example 2 (Cont.). P = ?; W = 300 N; uk
Example 3: What push P up the incline is needed to
Example 3: What push P up the incline is needed to
Example 3 (Cont.): Find P to give move up the incline
Example 3 (Cont.): Find P to give move up the incline
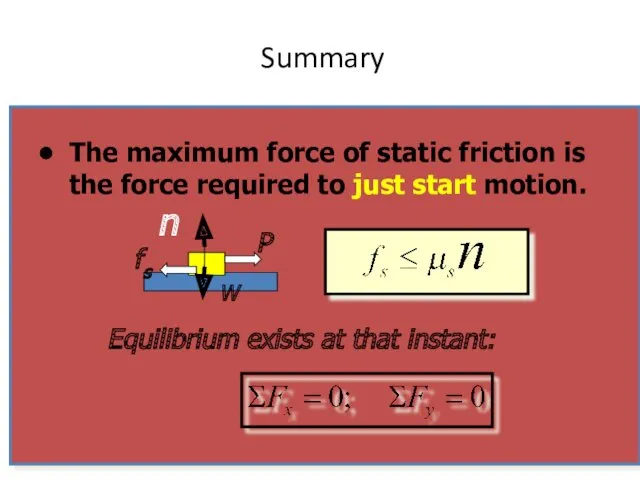
Summary
Equilibrium exists at that instant:
Summary
Equilibrium exists at that instant:
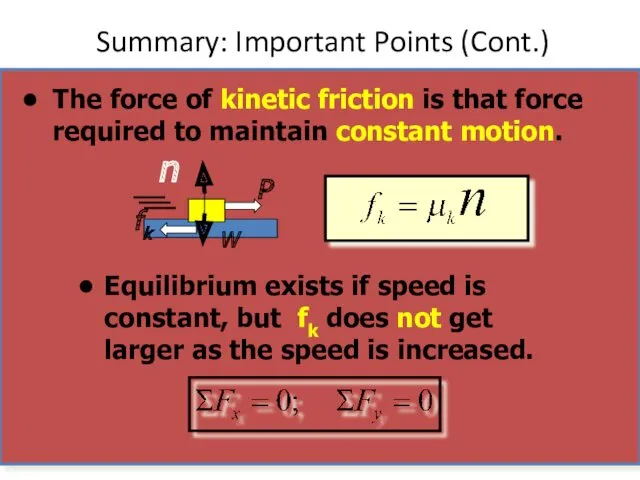
Summary: Important Points (Cont.)
Equilibrium exists if speed is constant, but fk
Summary: Important Points (Cont.)
Equilibrium exists if speed is constant, but fk
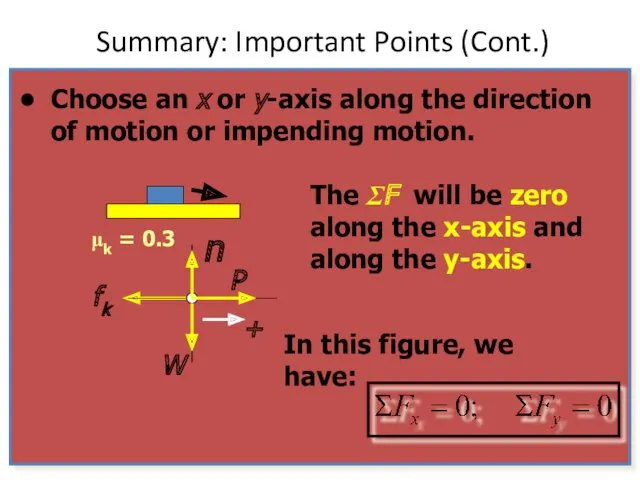
Summary: Important Points (Cont.)
The ΣF will be zero along the x-axis
Summary: Important Points (Cont.)
The ΣF will be zero along the x-axis
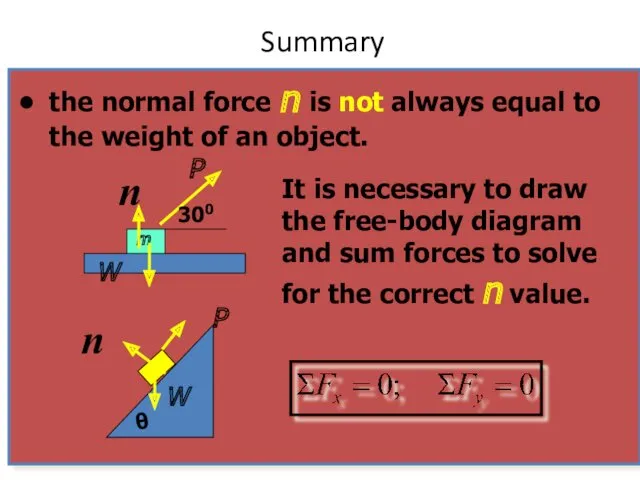
Summary
It is necessary to draw the free-body diagram and sum forces
Summary
It is necessary to draw the free-body diagram and sum forces
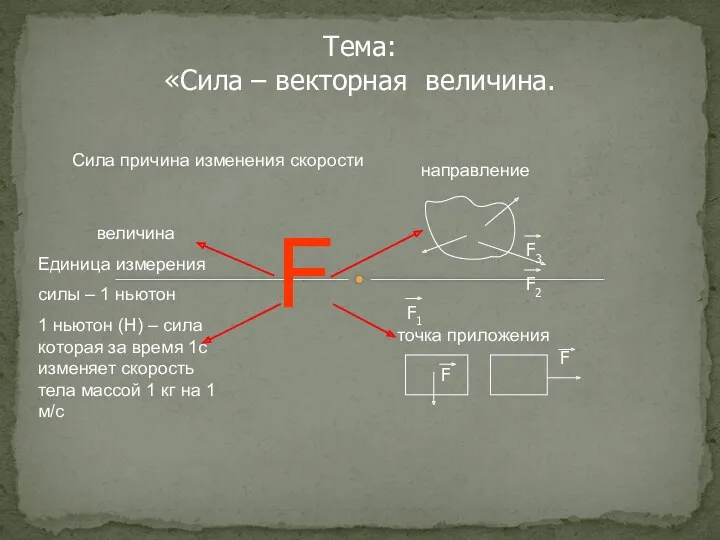 Сила – векторная величина
Сила – векторная величина Газовые законы
Газовые законы Плюсы и минусы сотовых телефонов
Плюсы и минусы сотовых телефонов Организация работ по диагностированию, техническому обслуживанию и ремонту передней подвески Газ 31105
Организация работ по диагностированию, техническому обслуживанию и ремонту передней подвески Газ 31105 Презентация к уроку Естественная радиоактивность
Презентация к уроку Естественная радиоактивность Силы в механике. Законы Ньютона
Силы в механике. Законы Ньютона Свойства твердых тел
Свойства твердых тел Винтовая передача
Винтовая передача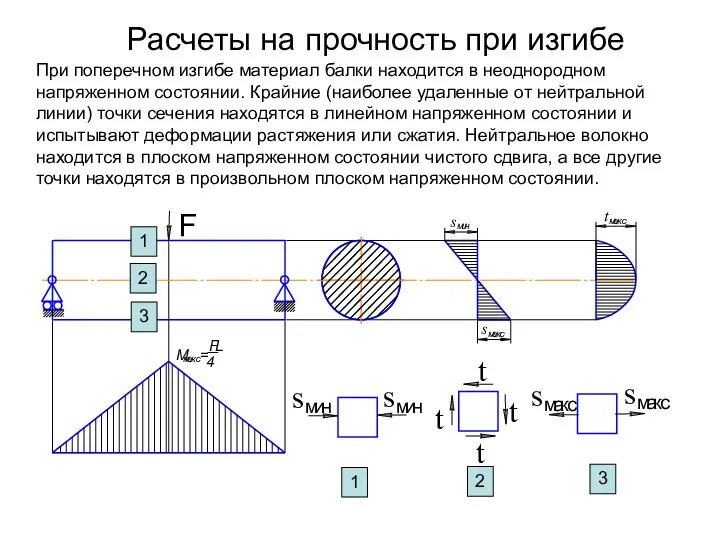 Расчеты на прочность при изгибе
Расчеты на прочность при изгибе Квазиравновесный конденсат поляритонов в GaAs микрорезонаторах в магнитном поле
Квазиравновесный конденсат поляритонов в GaAs микрорезонаторах в магнитном поле Скорость. Единицы измерения скорости
Скорость. Единицы измерения скорости Розв’язування задач з теми Механічна робота. Потужність
Розв’язування задач з теми Механічна робота. Потужність Механические передачи. Виды передач. Расчет передаточных отношений
Механические передачи. Виды передач. Расчет передаточных отношений Связь физики с профессией
Связь физики с профессией Бұрандалы конвейерлер. Түрлері және қолдану аймағы
Бұрандалы конвейерлер. Түрлері және қолдану аймағы Металлорежущие станки и станочные комплексы. Общие сведения и механизмы станков. (Темы 1 и 2)
Металлорежущие станки и станочные комплексы. Общие сведения и механизмы станков. (Темы 1 и 2) Загальна характеристика історичного розвитку фізики як науки
Загальна характеристика історичного розвитку фізики як науки Теплотехника Техническая термодинамика и теплопередача
Теплотехника Техническая термодинамика и теплопередача Электрическое напряжение. Единицы напряжения. Вольтметр
Электрическое напряжение. Единицы напряжения. Вольтметр Термографія в медицині
Термографія в медицині Отражение и прохождение электромагнитной волны на границе двух сред. Стоячая электромагнитная волна. 18
Отражение и прохождение электромагнитной волны на границе двух сред. Стоячая электромагнитная волна. 18 Проектирование и производство изделий интегральной электроники. Фотолитография
Проектирование и производство изделий интегральной электроники. Фотолитография Атом энергиясын пайдалану қауіпсіздік мемлекеттік құру
Атом энергиясын пайдалану қауіпсіздік мемлекеттік құру Электромагнитные явления. Магнитное поле. Магнитное поле прямого тока
Электромагнитные явления. Магнитное поле. Магнитное поле прямого тока Гидродинамика. Поток жидкости и его основные понятия
Гидродинамика. Поток жидкости и его основные понятия Физические величины в электроэнергетике, их размерности
Физические величины в электроэнергетике, их размерности Клепка
Клепка ВКР: Модернизация трансмиссии УАЗ-3163 Патриот с целью повышения технико-эксплуатационных характеристик
ВКР: Модернизация трансмиссии УАЗ-3163 Патриот с целью повышения технико-эксплуатационных характеристик