- Уравнения динамики системы материальных точек

Содержание
- 2. Внешние силы, характеризующие взаимодействие системы с окружающей средой, обозначим через Главный вектор всех внутренних сил, действующих
- 3. Классификация связей. Уравнение удерживающей связи, наложенной на движение системы, имеет вид Система уравнений (1) не является
- 4. Связь называют идеальной, если работа ее реакции на любых виртуальных перемещениях равна нулю. Малые перемещения точек
- 5. Принцип Даламбера. . Составление уравнений динамики для конкретных механических систем значительно облегчается, если использовать принцип Даламбера:
- 6. движение, системы происходит так, что в любой момент времени сумма работ всех внешних и внутренних сил,
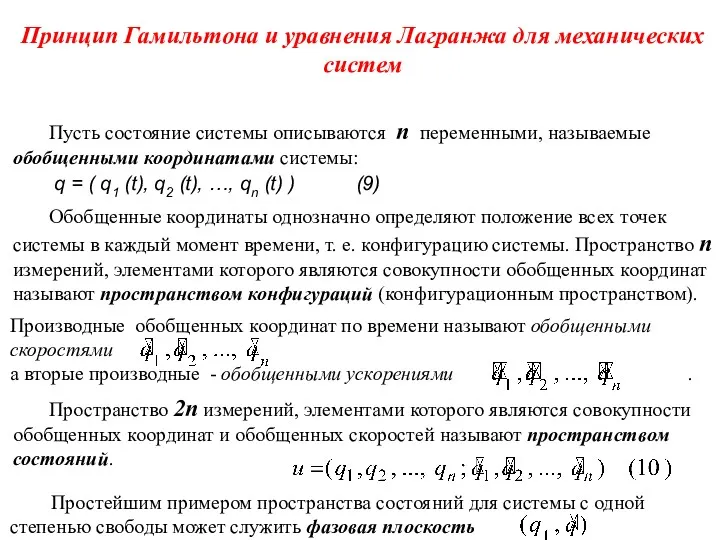
- 7. Принцип Гамильтона и уравнения Лагранжа для механических систем Пусть состояние системы описываются n переменными, называемые обобщенными
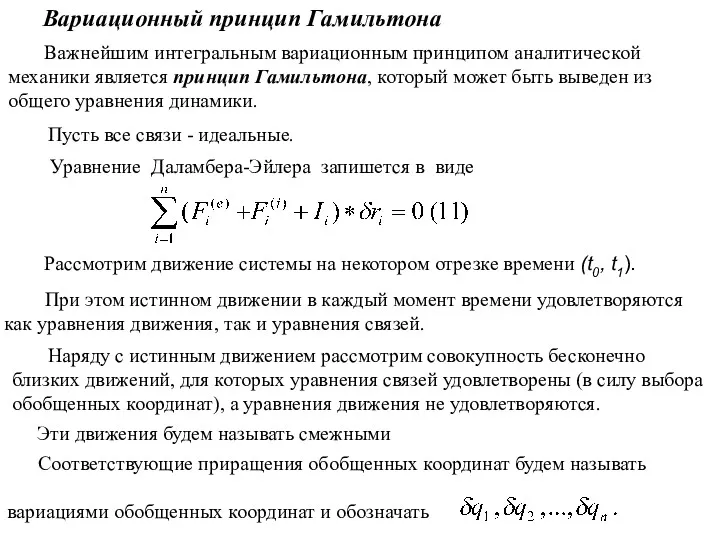
- 8. Вариационный принцип Гамильтона Важнейшим интегральным вариационным принципом аналитической механики является принцип Гамильтона, который может быть выведен
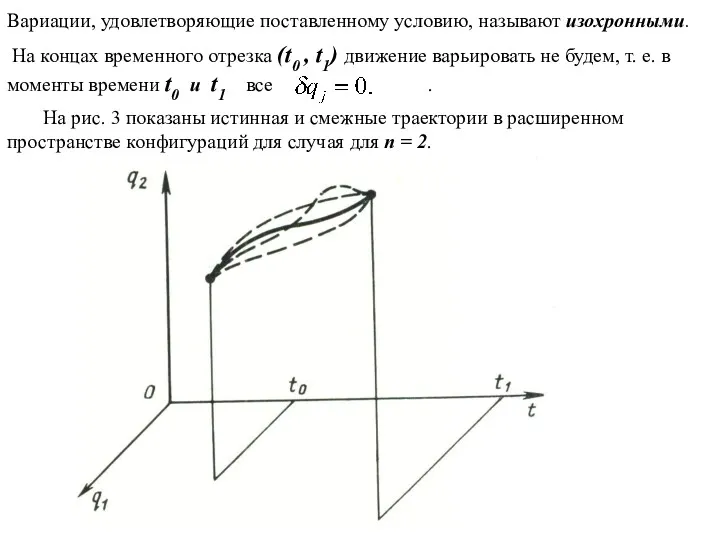
- 9. Вариации, удовлетворяющие поставленному условию, называют изохронными. На концах временного отрезка (t0 , t1) движение варьировать не
- 10. Из уравнения (11) следует утверждение: истинное движение системы происходит так, что при любых изохронных вариациях, обращающихся
- 11. Кинетическая энергия Т и виртуальная работа , входящие в соотношения типа (5), должны быть выражены через
- 12. Тогда вместо соотношения (13) получаем Выражение, стоящее под знаком интеграла, называют функцией Лагранжа или лагранжианом; Соотношение
- 13. Дифференциальные уравнения, соответствующие вариационному принципу Гамильтона, называют уравнениями Лагранжа (второго рода). Совокупность уравнений Лагранжа для рассматриваемой
- 14. В тех случаях, когда некоторые силы, действующие на систему, консервативны, целесообразно учесть влияние этих сил через
- 15. Процесс рассеяния (диссипации) механической энергии проще всего учитывается введением сил, пропорциональных обобщенным скоростям. В общем случае
- 17. Скачать презентацию
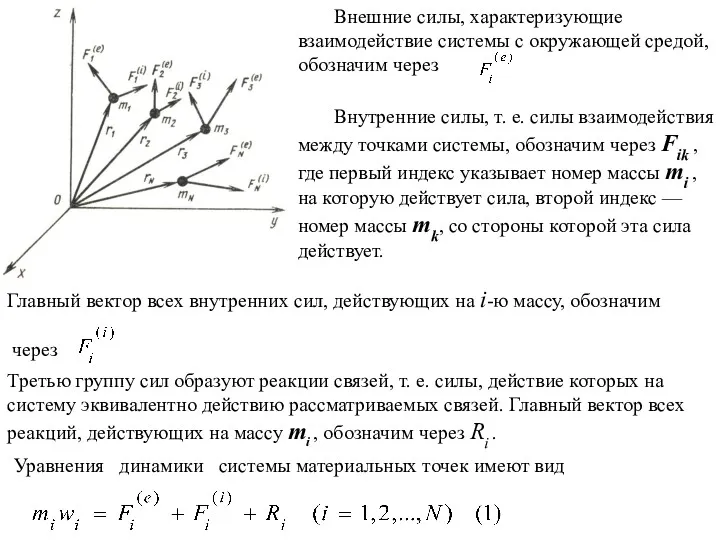
Внешние силы, характеризующие взаимодействие системы с окружающей средой, обозначим через
Главный
Внешние силы, характеризующие взаимодействие системы с окружающей средой, обозначим через
Главный
Классификация связей.
Уравнение удерживающей связи, наложенной на движение системы, имеет вид
Система
Классификация связей.
Уравнение удерживающей связи, наложенной на движение системы, имеет вид
Система
Связь называют идеальной, если работа ее реакции на любых виртуальных перемещениях
Связь называют идеальной, если работа ее реакции на любых виртуальных перемещениях
Принцип Даламбера. .
Составление уравнений динамики для конкретных механических систем значительно
Принцип Даламбера. .
Составление уравнений динамики для конкретных механических систем значительно
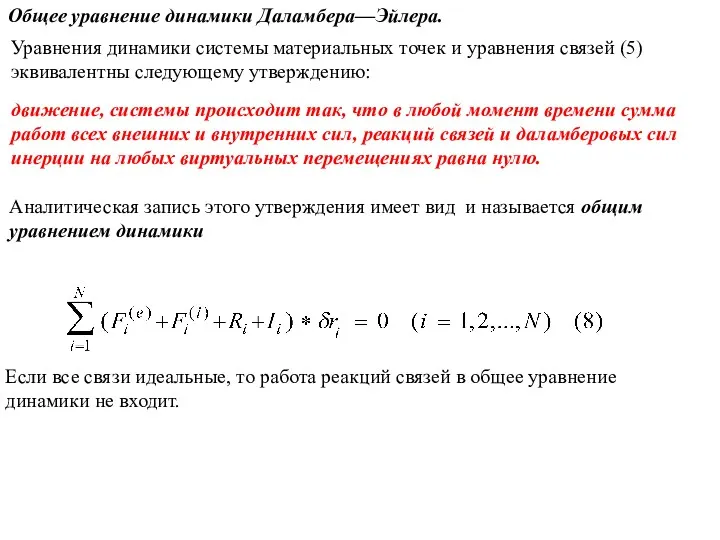
движение, системы происходит так, что в любой момент времени сумма работ
движение, системы происходит так, что в любой момент времени сумма работ
Принцип Гамильтона и уравнения Лагранжа для механических систем
Пусть состояние системы описываются
Принцип Гамильтона и уравнения Лагранжа для механических систем
Пусть состояние системы описываются
Вариационный принцип Гамильтона
Важнейшим интегральным вариационным принципом аналитической механики является принцип
Вариационный принцип Гамильтона
Важнейшим интегральным вариационным принципом аналитической механики является принцип
Вариации, удовлетворяющие поставленному условию, называют изохронными.
На концах временного отрезка
Вариации, удовлетворяющие поставленному условию, называют изохронными.
На концах временного отрезка
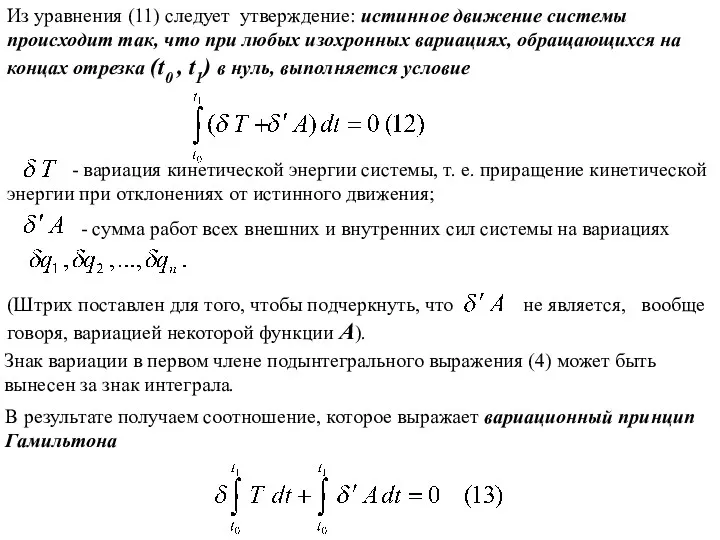
Из уравнения (11) следует утверждение: истинное движение системы происходит так, что
Из уравнения (11) следует утверждение: истинное движение системы происходит так, что
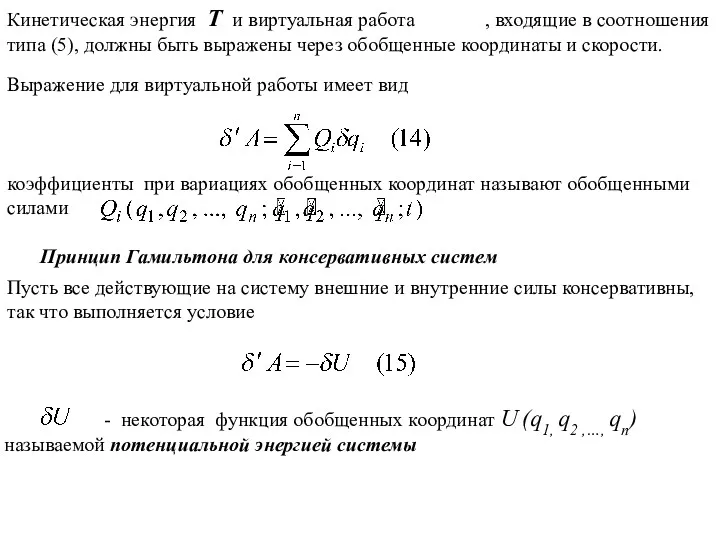
Кинетическая энергия Т и виртуальная работа , входящие в соотношения типа
Кинетическая энергия Т и виртуальная работа , входящие в соотношения типа
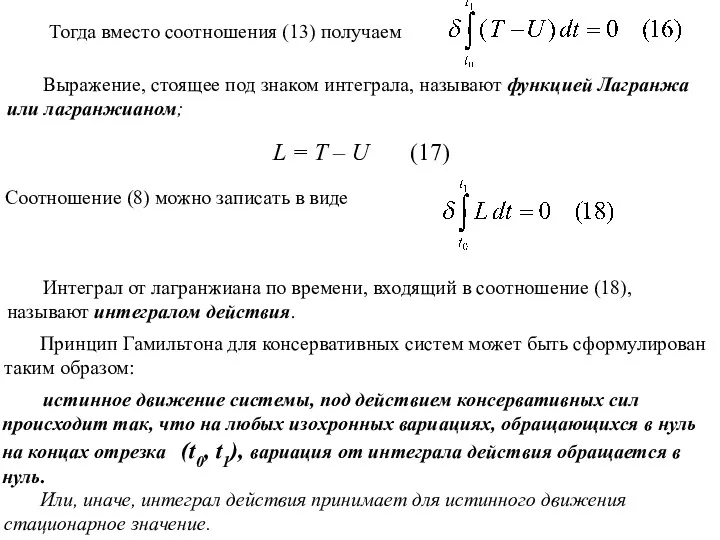
Тогда вместо соотношения (13) получаем
Выражение, стоящее под знаком интеграла, называют функцией
Тогда вместо соотношения (13) получаем
Выражение, стоящее под знаком интеграла, называют функцией
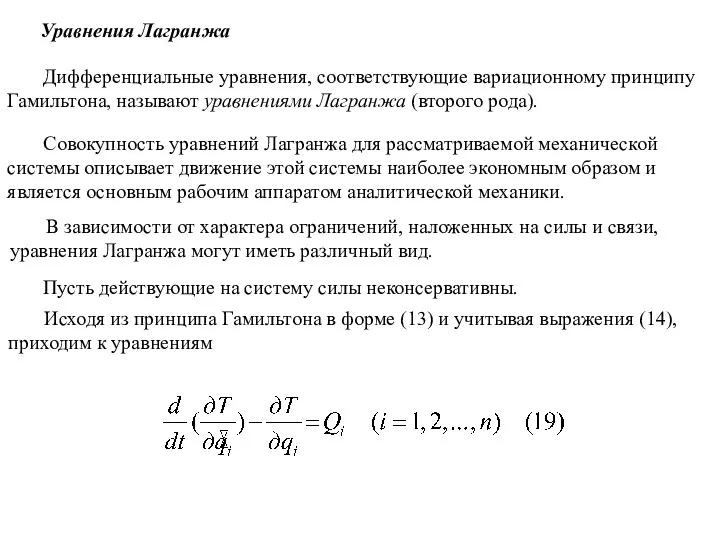
Дифференциальные уравнения, соответствующие вариационному принципу Гамильтона, называют уравнениями Лагранжа (второго рода).
Дифференциальные уравнения, соответствующие вариационному принципу Гамильтона, называют уравнениями Лагранжа (второго рода).
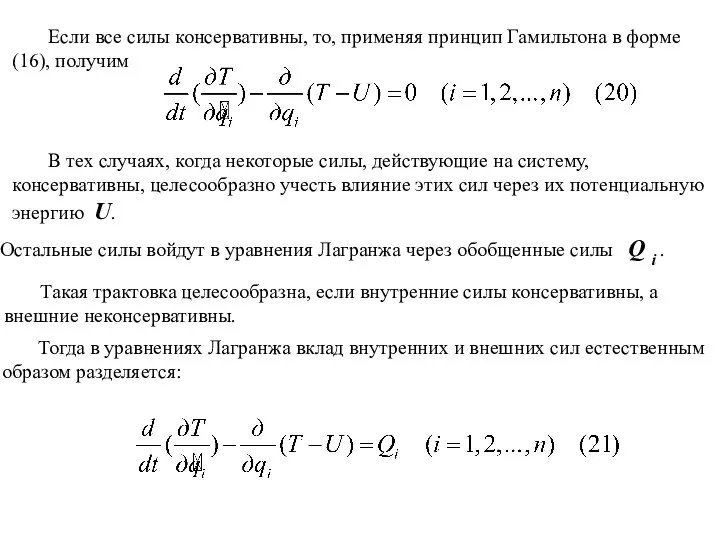
В тех случаях, когда некоторые силы, действующие на систему, консервативны, целесообразно
В тех случаях, когда некоторые силы, действующие на систему, консервативны, целесообразно
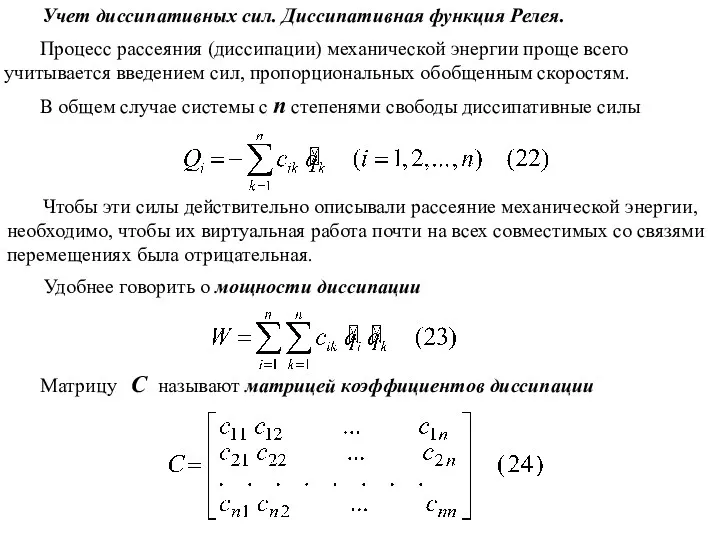
Процесс рассеяния (диссипации) механической энергии проще всего учитывается введением сил, пропорциональных
Процесс рассеяния (диссипации) механической энергии проще всего учитывается введением сил, пропорциональных
 Деление ядер урана. Цепные ядерные реакции
Деление ядер урана. Цепные ядерные реакции Электростатика. Постоянный ток. (Лекция 4)
Электростатика. Постоянный ток. (Лекция 4) Оптические приборы
Оптические приборы Необычные средства связи. Викторина
Необычные средства связи. Викторина DSG. Automatic and manual modes
DSG. Automatic and manual modes Оптичні явища у природі
Оптичні явища у природі Антенны и распространение радиоволн
Антенны и распространение радиоволн Принцип дії теплових двигунів
Принцип дії теплових двигунів Презентация Тест 11 класс. Итог
Презентация Тест 11 класс. Итог Деление атомных ядер. Цепная реакция. Термоядерный синтез
Деление атомных ядер. Цепная реакция. Термоядерный синтез Лазеры (или идеал, который создал человек)
Лазеры (или идеал, который создал человек) Катушки со сталью в цепи синусоидального тока
Катушки со сталью в цепи синусоидального тока Презентация по физике на тему _Шкала электромагнитных волн_
Презентация по физике на тему _Шкала электромагнитных волн_ Турбонаддув. Турбированный бензиновый двигатель
Турбонаддув. Турбированный бензиновый двигатель Магнитные преобразователи
Магнитные преобразователи Механическая работа и мощность
Механическая работа и мощность Ток в электролитах
Ток в электролитах Организация работ по диагностированию, техническому обслуживанию и ремонту ЗИЛ-5301. Процесс ремонта переднего моста
Организация работ по диагностированию, техническому обслуживанию и ремонту ЗИЛ-5301. Процесс ремонта переднего моста Основы теории подобия
Основы теории подобия Кристаллические и аморфные тела
Кристаллические и аморфные тела Закон Кулона
Закон Кулона Плавление и отвердевание
Плавление и отвердевание Основные положения МКТ. Физика. 10 класс
Основные положения МКТ. Физика. 10 класс Движение в неинерциальной системе отсчета
Движение в неинерциальной системе отсчета Магнитное поле катушки с током. Электромагниты и их применение. 8 класс
Магнитное поле катушки с током. Электромагниты и их применение. 8 класс Акустика. Затухание волн
Акустика. Затухание волн Компетентностный подход в образовании.
Компетентностный подход в образовании. Передача электромагнитной энергии. Волноводы
Передача электромагнитной энергии. Волноводы