- Урок №2 Виды нагрузок в системе электропривода

Содержание
- 2. Электропривод Урок № 2 Тема: Виды нагрузок в системе электропривода
- 3. Электропривод Виды нагрузок в системе электропривода План 1. Механические характеристики производственных механизмов. 2. Механические характеристики электродвигателей.
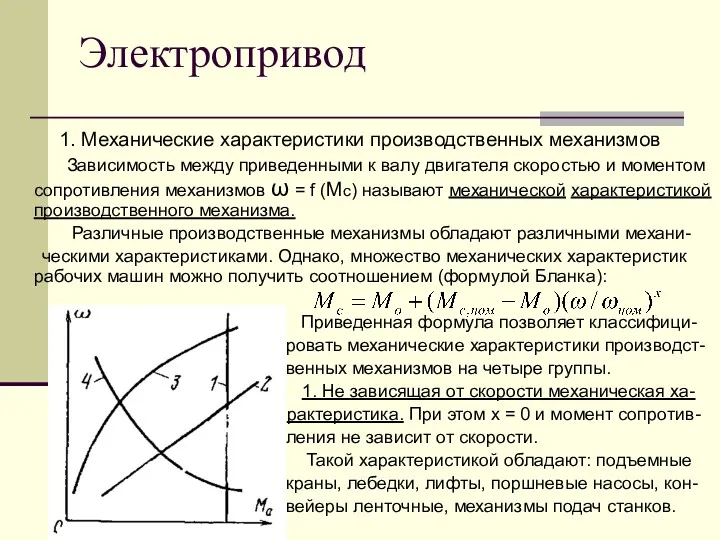
- 4. Электропривод 1. Механические характеристики производственных механизмов Зависимость между приведенными к валу двигателя скоростью и моментом сопротивления
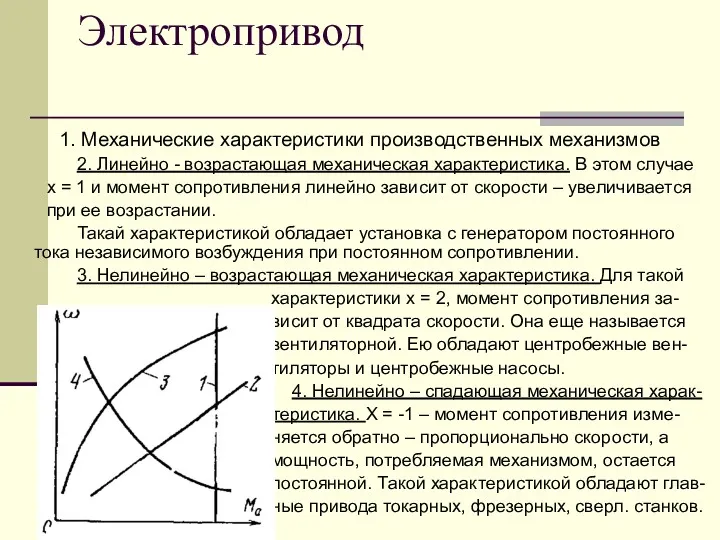
- 5. Электропривод 1. Механические характеристики производственных механизмов 2. Линейно - возрастающая механическая характеристика. В этом случае х
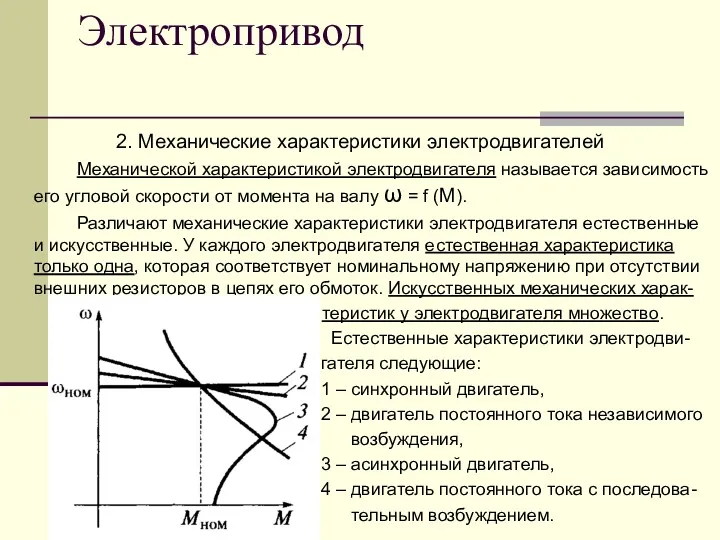
- 6. Электропривод 2. Механические характеристики электродвигателей Механической характеристикой электродвигателя называется зависимость его угловой скорости от момента на
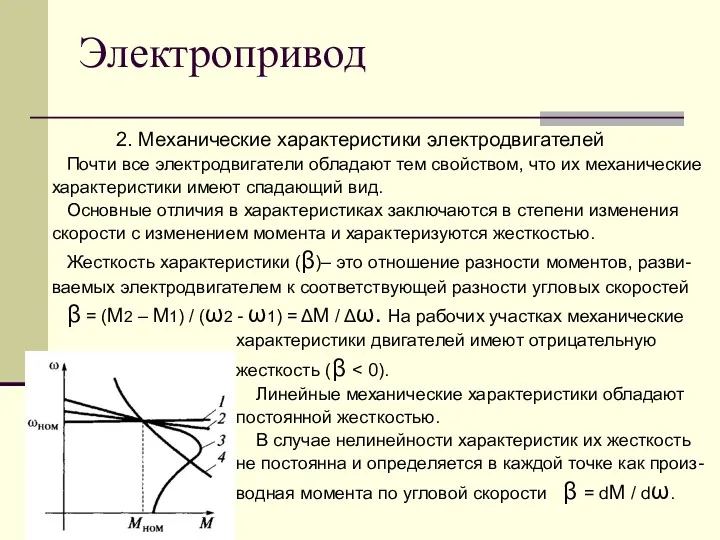
- 7. Электропривод 2. Механические характеристики электродвигателей Почти все электродвигатели обладают тем свойством, что их механические характеристики имеют
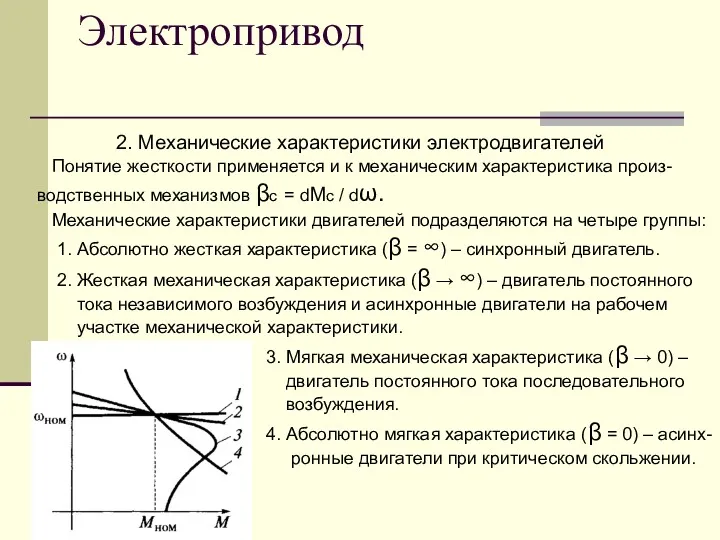
- 8. Электропривод 2. Механические характеристики электродвигателей Понятие жесткости применяется и к механическим характеристика произ- водственных механизмов βс
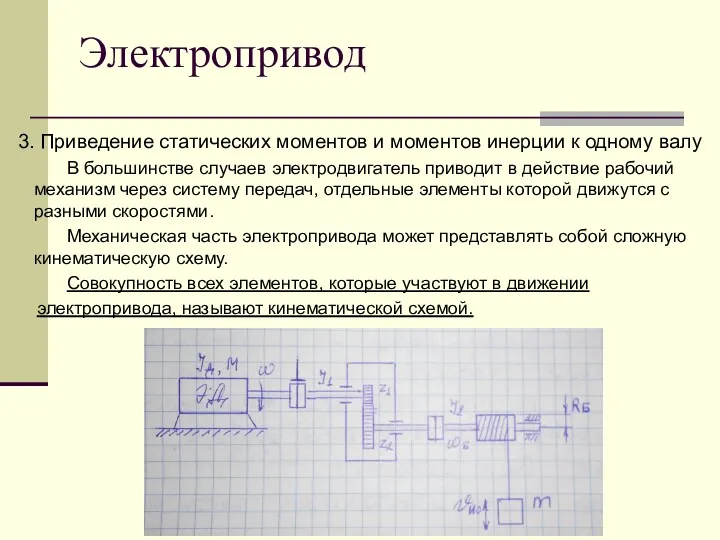
- 9. Электропривод 3. Приведение статических моментов и моментов инерции к одному валу В большинстве случаев электродвигатель приводит
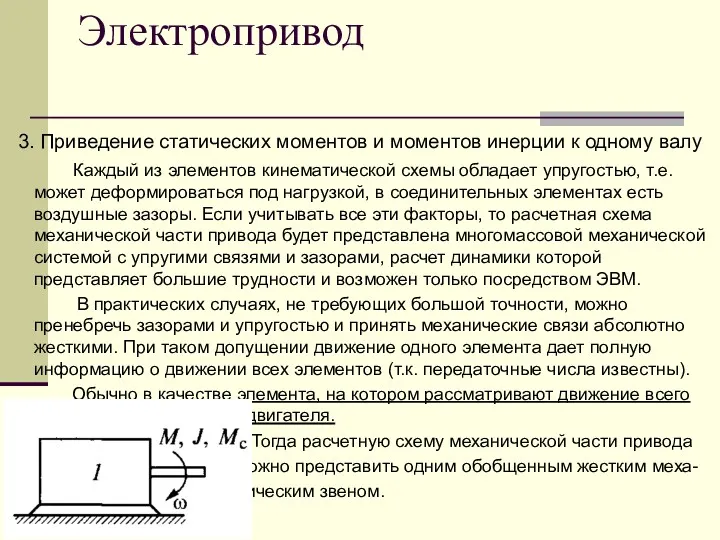
- 10. Электропривод 3. Приведение статических моментов и моментов инерции к одному валу Каждый из элементов кинематической схемы
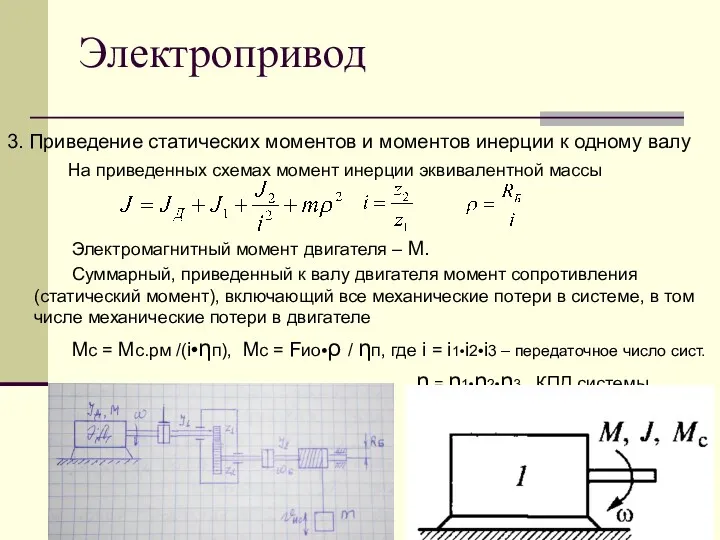
- 11. Электропривод 3. Приведение статических моментов и моментов инерции к одному валу На приведенных схемах момент инерции
- 12. Электропривод 3. Приведение статических моментов и моментов инерции к одному валу При спуске груза его уменьшающаяся
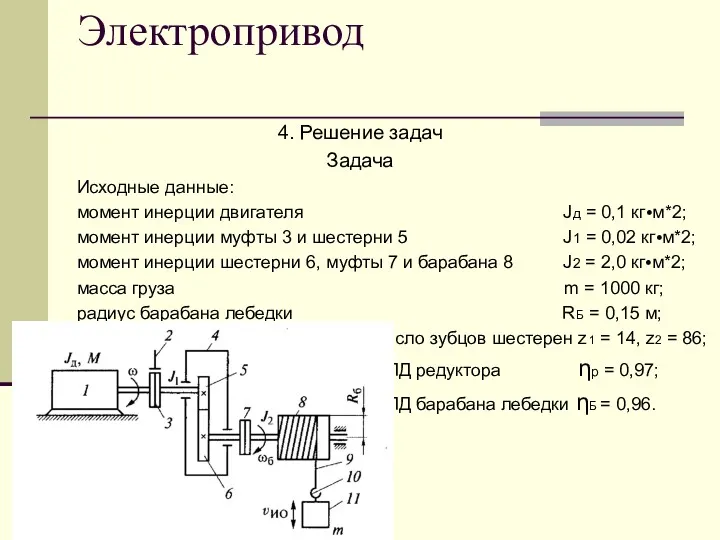
- 13. Электропривод 4. Решение задач Задача Исходные данные: момент инерции двигателя Jд = 0,1 кг•м*2; момент инерции
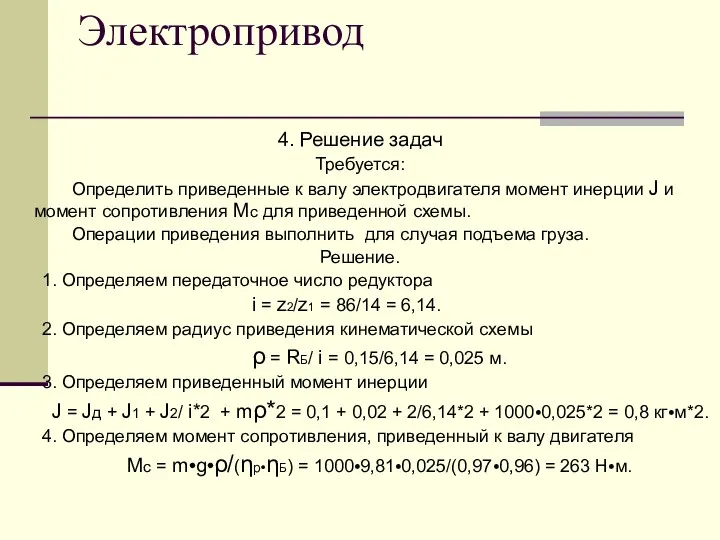
- 14. Электропривод 4. Решение задач Требуется: Определить приведенные к валу электродвигателя момент инерции J и момент сопротивления
- 16. Скачать презентацию
Электропривод
Урок № 2
Тема: Виды нагрузок в системе электропривода
Электропривод
Урок № 2
Тема: Виды нагрузок в системе электропривода
Электропривод
Виды нагрузок в системе электропривода
План
1. Механические характеристики производственных
механизмов.
Электропривод
Виды нагрузок в системе электропривода
План
1. Механические характеристики производственных
механизмов.
Электропривод
1. Механические характеристики производственных механизмов
Зависимость между приведенными к валу двигателя
Электропривод
1. Механические характеристики производственных механизмов
Зависимость между приведенными к валу двигателя
Электропривод
1. Механические характеристики производственных механизмов
2. Линейно - возрастающая механическая характеристика.
Электропривод
1. Механические характеристики производственных механизмов
2. Линейно - возрастающая механическая характеристика.
Электропривод
2. Механические характеристики электродвигателей
Механической характеристикой электродвигателя называется зависимость его угловой
Электропривод
2. Механические характеристики электродвигателей
Механической характеристикой электродвигателя называется зависимость его угловой
Электропривод
2. Механические характеристики электродвигателей
Почти все электродвигатели обладают тем свойством, что
Электропривод
2. Механические характеристики электродвигателей
Почти все электродвигатели обладают тем свойством, что
Электропривод
2. Механические характеристики электродвигателей
Понятие жесткости применяется и к механическим характеристика
Электропривод
2. Механические характеристики электродвигателей
Понятие жесткости применяется и к механическим характеристика
Электропривод
3. Приведение статических моментов и моментов инерции к одному валу
В
Электропривод
3. Приведение статических моментов и моментов инерции к одному валу
В
Электропривод
3. Приведение статических моментов и моментов инерции к одному валу
Каждый
Электропривод
3. Приведение статических моментов и моментов инерции к одному валу
Каждый
Электропривод
3. Приведение статических моментов и моментов инерции к одному валу
На
Электропривод
3. Приведение статических моментов и моментов инерции к одному валу
На

Электропривод
3. Приведение статических моментов и моментов инерции к одному валу
При
Электропривод
3. Приведение статических моментов и моментов инерции к одному валу
При
Электропривод
4. Решение задач
Задача
Исходные данные:
момент инерции двигателя Jд = 0,1
Электропривод
4. Решение задач
Задача
Исходные данные:
момент инерции двигателя Jд = 0,1
Электропривод
4. Решение задач
Требуется:
Определить приведенные к валу электродвигателя момент инерции J
Электропривод
4. Решение задач
Требуется:
Определить приведенные к валу электродвигателя момент инерции J
 Электрический ток в различных средах
Электрический ток в различных средах Новые цели школьного физического образования – новые учебные задачи
Новые цели школьного физического образования – новые учебные задачи Tym Tractor T543 T603
Tym Tractor T543 T603 Електроємність. Конденсатори та їх використання в техніці. Енергія електричного поля
Електроємність. Конденсатори та їх використання в техніці. Енергія електричного поля Элементы машиноведения. Составные части машин
Элементы машиноведения. Составные части машин Философские проблемы физики и астрономии
Философские проблемы физики и астрономии Урок по физике на тему:Инерция и инертность
Урок по физике на тему:Инерция и инертность Технологический процесс изготовления детали Шестерня
Технологический процесс изготовления детали Шестерня Кинематика. Кинематика точки
Кинематика. Кинематика точки Физика и метод научного познания
Физика и метод научного познания Плотность вещества. 7 класс
Плотность вещества. 7 класс Блок. Золотое правило механики. Тест
Блок. Золотое правило механики. Тест Типы приводов
Типы приводов Конвективті жылу беру
Конвективті жылу беру Техническое обслуживание и ремонт комплексной системы автоматического управления двигателем автомобиля Lada Kalina
Техническое обслуживание и ремонт комплексной системы автоматического управления двигателем автомобиля Lada Kalina Проектная работа на элективных курсах по физике.
Проектная работа на элективных курсах по физике. Характеристики грозовой деятельности и параметры молнии. Первоначальный механизм электризации
Характеристики грозовой деятельности и параметры молнии. Первоначальный механизм электризации Сварочные тележки
Сварочные тележки Структура механизмов. (Семинар 1)
Структура механизмов. (Семинар 1) Механическое движение 7 класс
Механическое движение 7 класс Модель атома. Опыт Резерфорда
Модель атома. Опыт Резерфорда Контроль качества в рентгенодиагностике
Контроль качества в рентгенодиагностике Физический диктант
Физический диктант Электризация тел
Электризация тел Удельная теплоёмкость
Удельная теплоёмкость Tiristor GTO
Tiristor GTO Исследовательская работа Посудомоечная машина
Исследовательская работа Посудомоечная машина Свободное падение тел
Свободное падение тел