- Устройство и принцип действия асинхронной машины. (Лекция 2)

Содержание
- 2. Устройство и принцип действия асинхронной машины Асинхронной машиной называют двухобмоточную электрическую машину переменного тока, у которой
- 3. Общий вид двигателя с фазным ротором( с контактными кольцами)
- 4. Конструкция АД С короткозамкнутым ротором
- 5. Конструкция к.з. и фазного роторов
- 6. Элементы конструкции: сердечник статора (верхний рисунок справа) и шихтованный лист (верхний рисунок слева), а) беличья клетка,
- 7. Конструкция пазов ротора и статора Пазы ротора: а)всыпная однослойная укладка обмотки, б) двухслойная укладка обмотки Пазы
- 8. Принцип действия асинхронной машины Статорную обмотку подключают к сети переменного тока. По ней под действием переменного
- 9. Токи ротора, взаимодействуя с ВМП статора, вызовут появление электромагнитной силы, действующей на проводники, и электромагнитного момента
- 10. Вращающееся магнитное поле пересекает проводники обмотки ротора и по закону электромагнитной индукции наводит в них ЭДС
- 11. Уравнение равновесия моментов на валу ротора В магнитном поле, создаваемом полюсами ВМП, появляются проводники ротора с
- 12. Основной закон динамики вращательного движения: Произведение момента инерции на угловое ускорение равно результирующему моменту сил, действующих
- 13. Так как для реального объекта момент инерции вращающихся масс J = const, то из выражения (А)
- 14. Режимы работы и области применения асинхронных машин 0 ≤ s ≤ 1 – двигательный режим, -∞
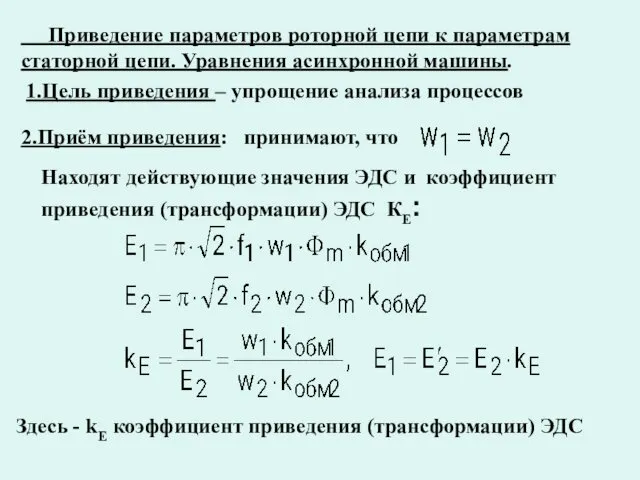
- 15. Приведение параметров роторной цепи к параметрам статорной цепи. Уравнения асинхронной машины. 2.Приём приведения: принимают, что Находят
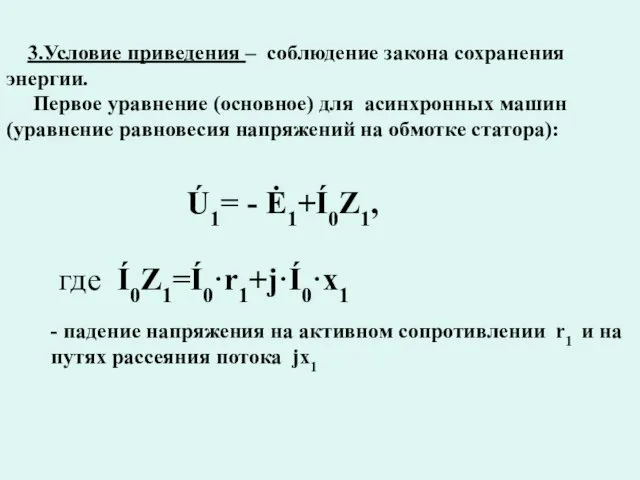
- 16. 3.Условие приведения – соблюдение закона сохранения энергии. Первое уравнение (основное) для асинхронных машин (уравнение равновесия напряжений
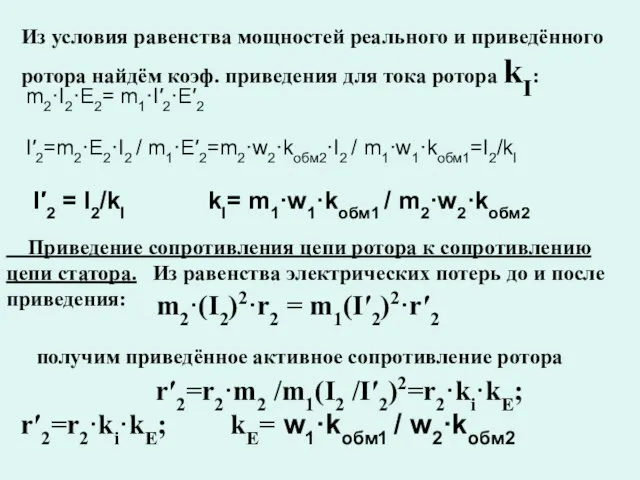
- 17. Из условия равенства мощностей реального и приведённого ротора найдём коэф. приведения для тока ротора kI: Приведение
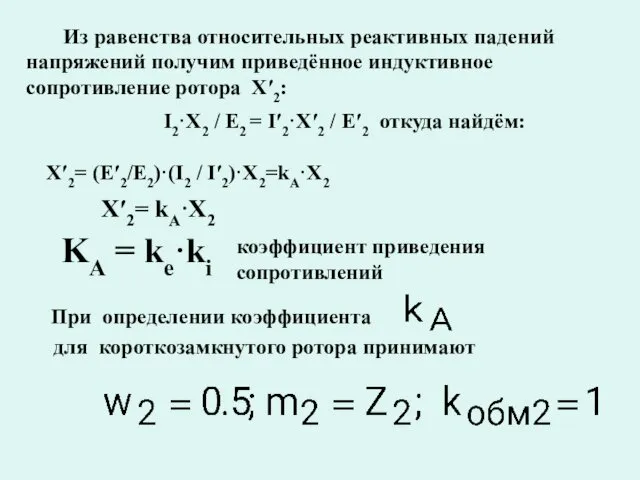
- 18. Из равенства относительных реактивных падений напряжений получим приведённое индуктивное сопротивление ротора X′2: При определении коэффициента для
- 19. Основные уравнения и схема замещения асинхронной машины Запишем выражение для тока I1: I1 = I0 +(-
- 20. Векторная диаграмма асинхронной машины, работающей под нагрузкой
- 21. Векторная диаграмма асинхронной машины работающей под нагрузкой. На рисунке обозначено: Номера в скобочках индексов – последовательность
- 22. Энергетическая диаграмма асинхронной машины где P2 – полезная (отдаваемая мощность); P1 – затрачиваемая (потребляемая мощность): потери
- 23. pc2 - пренебрегаем, т.к. Pмх – механическая мощность, развиваемая ротором. pдоб и pмех – добавочные и
- 26. Скачать презентацию
Устройство и принцип действия асинхронной машины
Асинхронной машиной называют двухобмоточную электрическую
Устройство и принцип действия асинхронной машины
Асинхронной машиной называют двухобмоточную электрическую
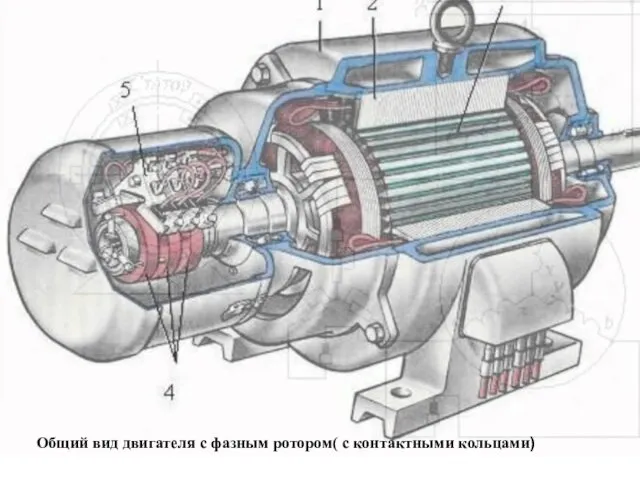
Общий вид двигателя с фазным ротором( с контактными кольцами)
Общий вид двигателя с фазным ротором( с контактными кольцами)
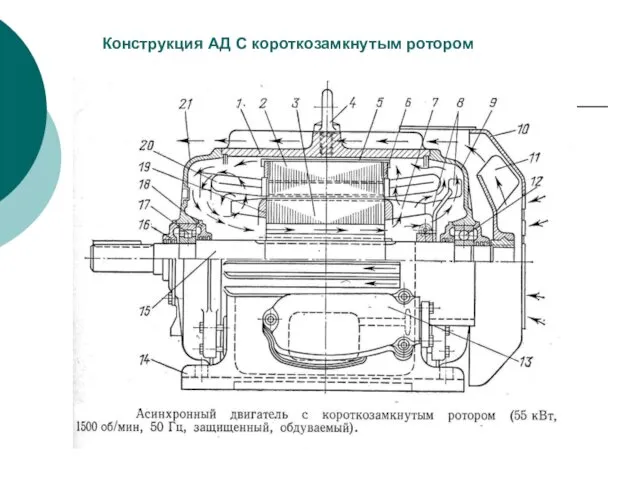
Конструкция АД С короткозамкнутым ротором
Конструкция АД С короткозамкнутым ротором
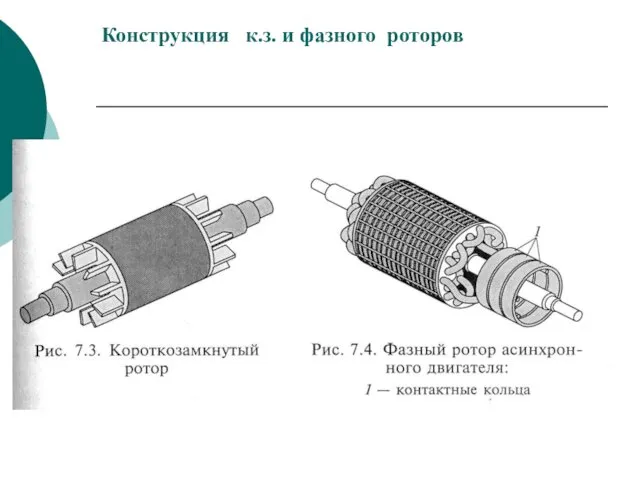
Конструкция к.з. и фазного роторов
Конструкция к.з. и фазного роторов

Элементы конструкции: сердечник статора (верхний рисунок справа) и шихтованный лист (верхний
Элементы конструкции: сердечник статора (верхний рисунок справа) и шихтованный лист (верхний
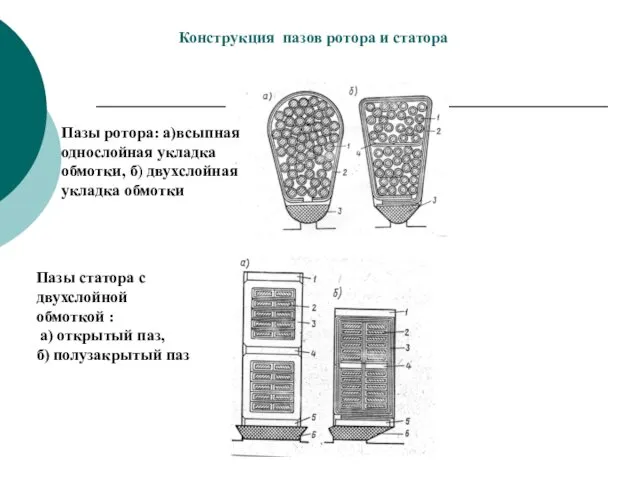
Конструкция пазов ротора и статора
Пазы ротора: а)всыпная однослойная укладка обмотки,
Конструкция пазов ротора и статора
Пазы ротора: а)всыпная однослойная укладка обмотки,
Принцип действия асинхронной машины
Статорную обмотку подключают к сети переменного
Принцип действия асинхронной машины
Статорную обмотку подключают к сети переменного
Токи ротора, взаимодействуя с ВМП статора, вызовут появление электромагнитной силы,
Токи ротора, взаимодействуя с ВМП статора, вызовут появление электромагнитной силы,
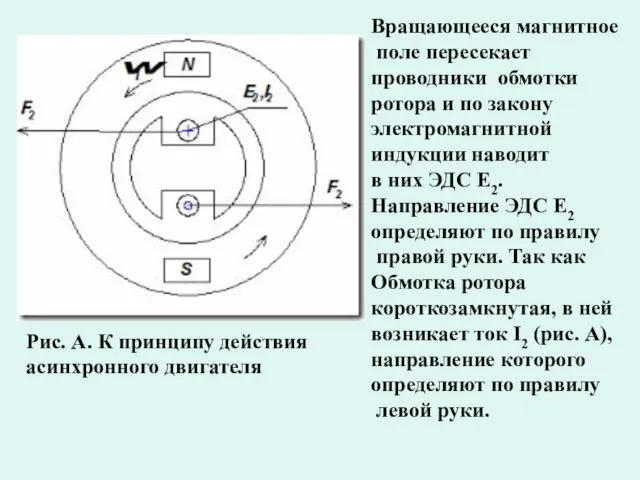
Вращающееся магнитное
поле пересекает
проводники обмотки
ротора и по закону электромагнитной
Вращающееся магнитное
поле пересекает
проводники обмотки
ротора и по закону электромагнитной
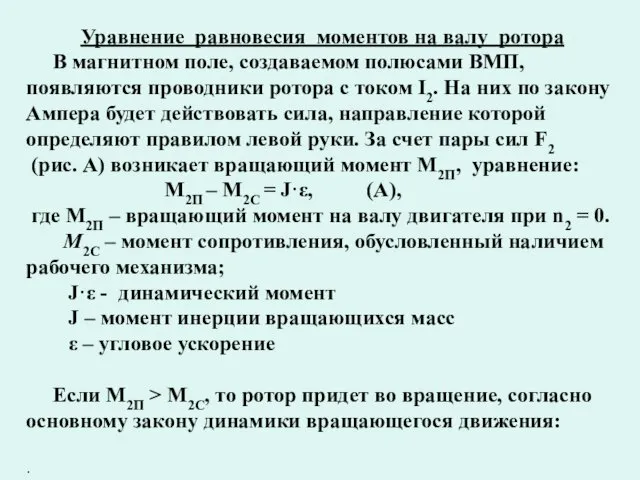
Уравнение равновесия моментов на валу ротора
В магнитном поле, создаваемом полюсами
Уравнение равновесия моментов на валу ротора
В магнитном поле, создаваемом полюсами
Основной закон динамики вращательного движения:
Произведение момента инерции на угловое ускорение равно
Произведение момента инерции на угловое ускорение равно
Так как для реального объекта момент инерции вращающихся масс J =
Так как для реального объекта момент инерции вращающихся масс J =
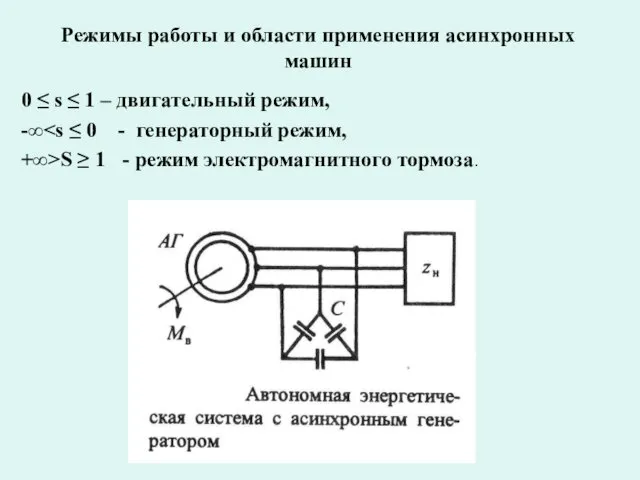
Режимы работы и области применения асинхронных машин
0 ≤ s ≤ 1
Режимы работы и области применения асинхронных машин
0 ≤ s ≤ 1
Приведение параметров роторной цепи к параметрам
статорной цепи. Уравнения асинхронной
Приведение параметров роторной цепи к параметрам
статорной цепи. Уравнения асинхронной
3.Условие приведения – соблюдение закона сохранения
энергии.
Первое уравнение
3.Условие приведения – соблюдение закона сохранения
энергии.
Первое уравнение
Из условия равенства мощностей реального и приведённого ротора найдём коэф. приведения
Из условия равенства мощностей реального и приведённого ротора найдём коэф. приведения
Из равенства относительных реактивных падений напряжений получим приведённое индуктивное сопротивление
Из равенства относительных реактивных падений напряжений получим приведённое индуктивное сопротивление
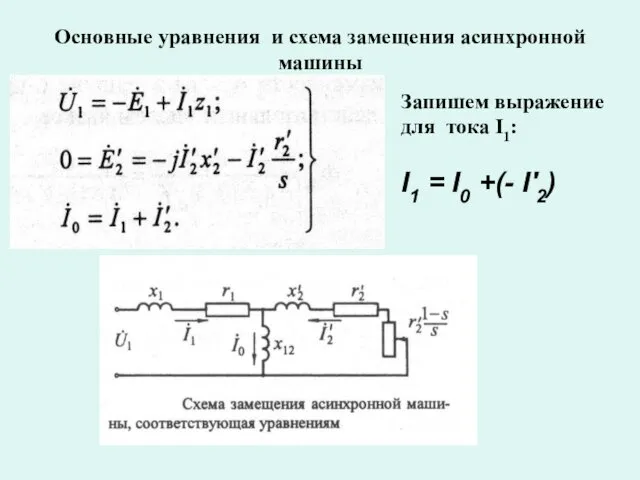
Основные уравнения и схема замещения асинхронной машины
Запишем выражение для тока
Основные уравнения и схема замещения асинхронной машины
Запишем выражение для тока
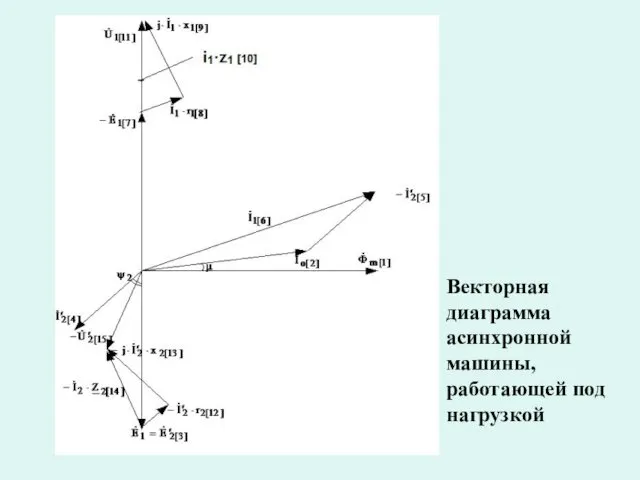
Векторная диаграмма асинхронной машины, работающей под нагрузкой
Векторная диаграмма асинхронной машины, работающей под нагрузкой
Векторная диаграмма асинхронной машины работающей
под нагрузкой.
На рисунке обозначено:
Номера в
Векторная диаграмма асинхронной машины работающей
под нагрузкой.
На рисунке обозначено:
Номера в
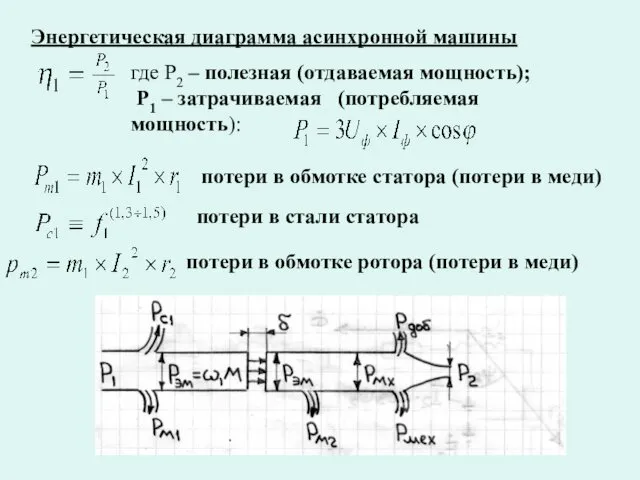
Энергетическая диаграмма асинхронной машины
где P2 – полезная (отдаваемая мощность);
P1 –
Энергетическая диаграмма асинхронной машины
где P2 – полезная (отдаваемая мощность);
P1 –
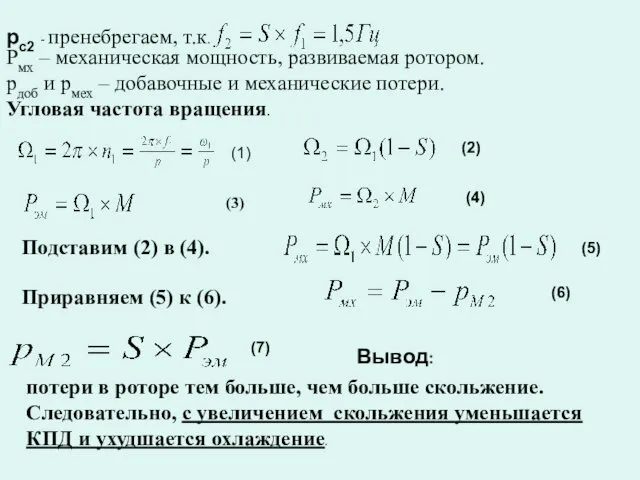
pc2 - пренебрегаем, т.к.
Pмх – механическая мощность, развиваемая ротором.
pдоб и
pc2 - пренебрегаем, т.к.
Pмх – механическая мощность, развиваемая ротором.
pдоб и
 Ядерная физика (Лекция 9)
Ядерная физика (Лекция 9)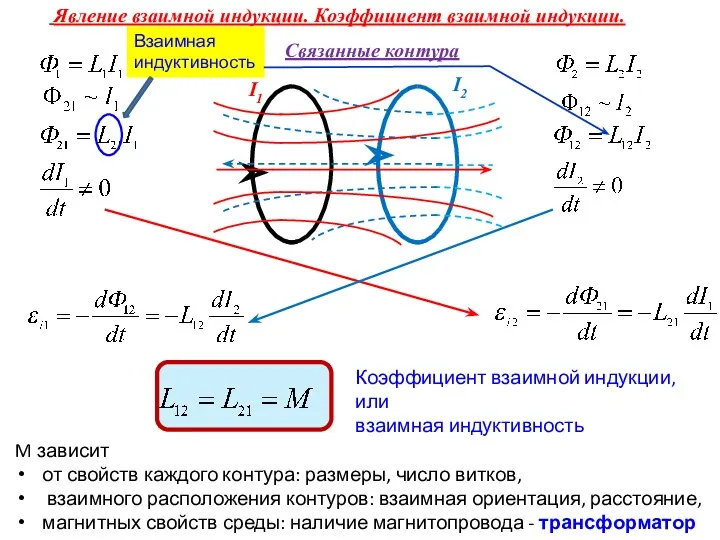 Явление взаимной индукции. Коэффициент взаимной индукции. Взаимная индуктивность
Явление взаимной индукции. Коэффициент взаимной индукции. Взаимная индуктивность Проводниковые материалы
Проводниковые материалы Швартовное устройство на судне
Швартовное устройство на судне Радиоактивность, как свидетельство сложного строения атома
Радиоактивность, как свидетельство сложного строения атома Презентация к игре Звездный час для учащихся 7-8 классов
Презентация к игре Звездный час для учащихся 7-8 классов Проницаемость
Проницаемость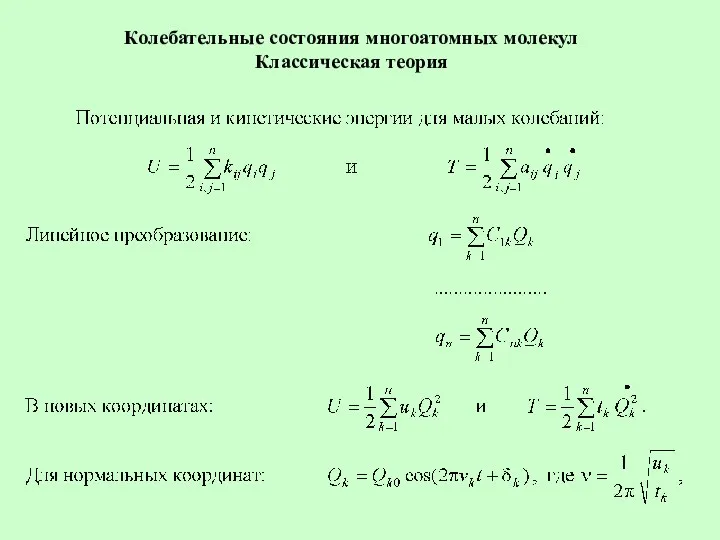 Колебательные состояния многоатомных молекул. Классическая теория
Колебательные состояния многоатомных молекул. Классическая теория Рулевое управление тракторов
Рулевое управление тракторов История фрезерного станка
История фрезерного станка Неподвижные элементы и неисправности газораспределительных механизмов
Неподвижные элементы и неисправности газораспределительных механизмов История паровых двигателей
История паровых двигателей Реактивное движение. Ракеты
Реактивное движение. Ракеты Презентация по теме Спектры
Презентация по теме Спектры Типовые соединения, применяемые в электроустановках. Методы и средства контроля размеров и качества сборки
Типовые соединения, применяемые в электроустановках. Методы и средства контроля размеров и качества сборки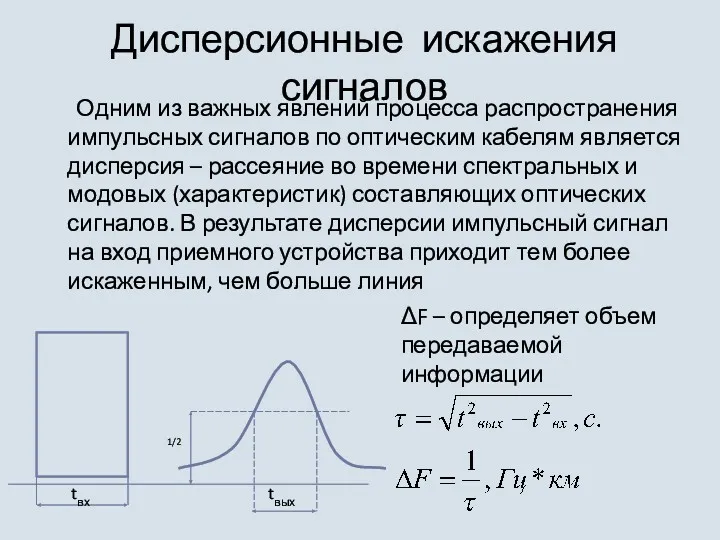 Дисперсионные искажения сигналов
Дисперсионные искажения сигналов Бытовая швейная машина
Бытовая швейная машина Интерференция света
Интерференция света Конспект урока на тему: Плотность вещества 7 класс
Конспект урока на тему: Плотность вещества 7 класс Презентация к уроку физики 8 класс
Презентация к уроку физики 8 класс Анимации на уроках физики.
Анимации на уроках физики. Система распределения тормозных усилий. Урок № 189
Система распределения тормозных усилий. Урок № 189 Ядерные реакции, атомная энергия
Ядерные реакции, атомная энергия Своя игра по физике - 7
Своя игра по физике - 7 Презентация к уроку физики Закон всемирного тяготения
Презентация к уроку физики Закон всемирного тяготения Основные понятия термодинамики
Основные понятия термодинамики Two types of transformers
Two types of transformers Алгоритм решения задач по теме Законы сохранения
Алгоритм решения задач по теме Законы сохранения