- Вектора. Кинематика. Лекция №1

Содержание
- 2. Введение Материальная точка – тело, размерами которого в условиях данной задачи можно пренебречь. Абсолютно твердое тело
- 3. Вектор Представление вектора: 1) две точки 2) радиус-вектор - вектор, задающий положения точки в пространстве относительно
- 4. Операции над векторами Нахождение модуля – вычисление длины Проекция вектора на ось Умножение на число Сложение
- 5. Операции над векторами Скалярное произведение векторов - операция над двумя векторами, результатом которой является число, характеризующее
- 6. Скорость. Ускорение. r1 r2 Δr ΔS x y Положение материальной точки в пространстве зададим радиус-вектором r.
- 7. Скорость. Ускорение. Скорость – векторная физическая величина, характеризующая быстроту перемещения и направление движения материальной точки относительно
- 8. Выразим ускорение через известные величины R и υ. Рассмотрим треугольник 134. Опустим перпендикуляр и учтем, что
- 9. Ускорение при криволинейном движении 1 2 0 3 4 υ υ+Δυ Δυn υ+Δυ ΔS Δϕ Δϕ
- 10. Вращение с постоянной угловой скоростью характеризуется временем полного оборота – период T. Величина обратная периоду называется
- 12. Скачать презентацию
Введение
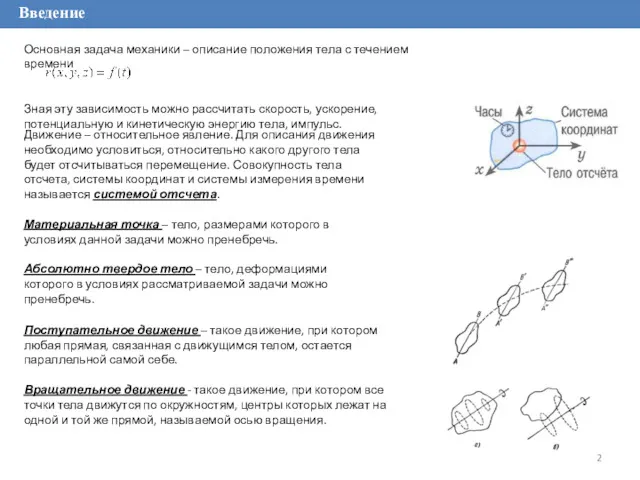
Материальная точка – тело, размерами которого в условиях данной задачи можно
Введение
Материальная точка – тело, размерами которого в условиях данной задачи можно

Вектор
Представление вектора:
1) две точки
2) радиус-вектор - вектор, задающий положения точки в пространстве относительно начала координат.
3)
Вектор
Представление вектора:
1) две точки
2) радиус-вектор - вектор, задающий положения точки в пространстве относительно начала координат.
3)
Операции над векторами
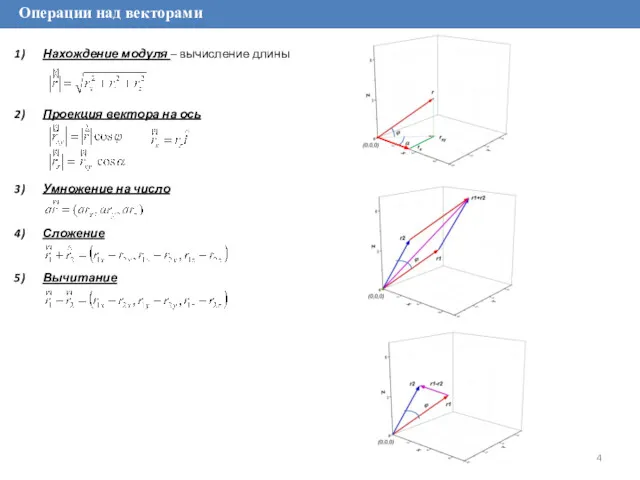
Нахождение модуля – вычисление длины
Проекция вектора на ось
Умножение на
Операции над векторами
Нахождение модуля – вычисление длины
Проекция вектора на ось
Умножение на
Операции над векторами
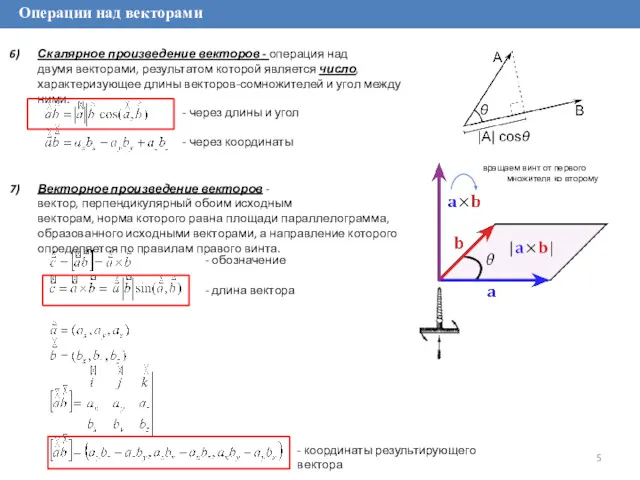
Скалярное произведение векторов - операция над двумя векторами, результатом которой
Операции над векторами
Скалярное произведение векторов - операция над двумя векторами, результатом которой
Скорость. Ускорение.
r1
r2
Δr
ΔS
x
y
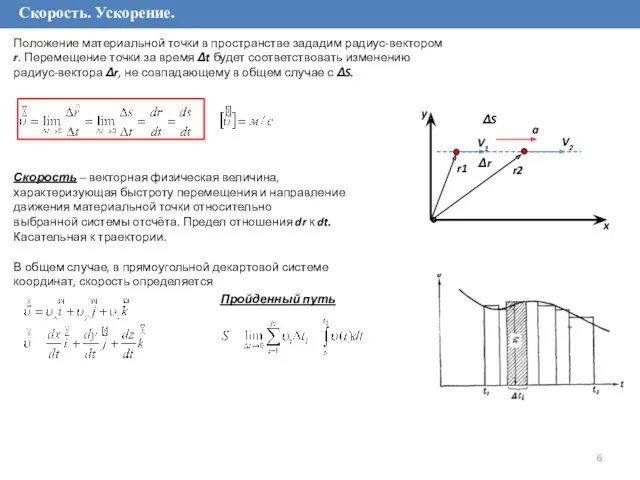
Положение материальной точки в пространстве зададим радиус-вектором r. Перемещение точки
Скорость. Ускорение.
r1
r2
Δr
ΔS
x
y
Положение материальной точки в пространстве зададим радиус-вектором r. Перемещение точки
Скорость. Ускорение.
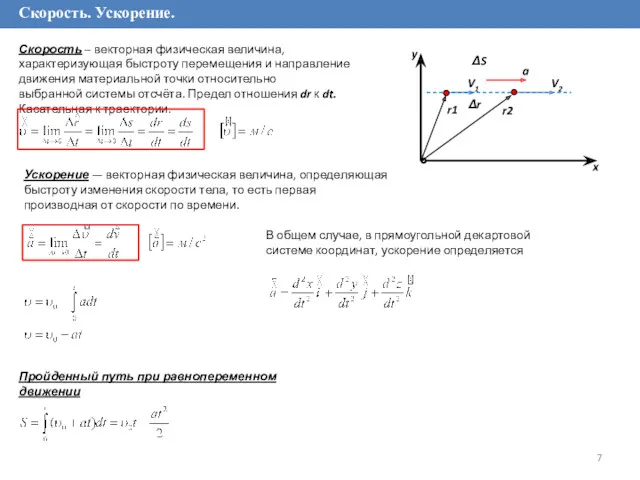
Скорость – векторная физическая величина, характеризующая быстроту перемещения и направление движения материальной точки относительно выбранной системы
Скорость. Ускорение.
Скорость – векторная физическая величина, характеризующая быстроту перемещения и направление движения материальной точки относительно выбранной системы
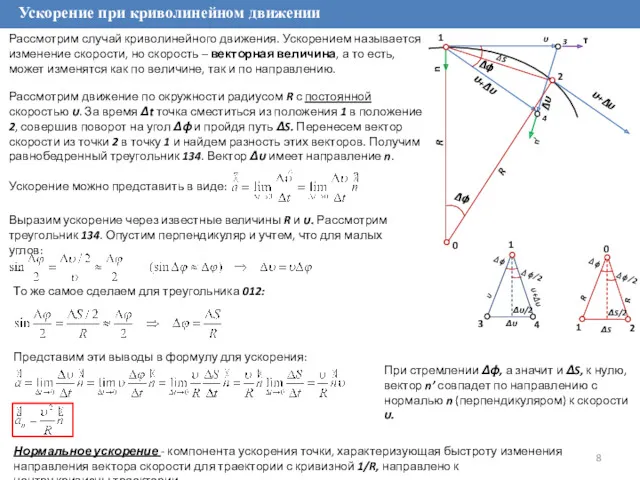
Выразим ускорение через известные величины R и υ. Рассмотрим треугольник 134.
Выразим ускорение через известные величины R и υ. Рассмотрим треугольник 134.
Ускорение при криволинейном движении
1
2
0
3
4
υ
υ+Δυ
Δυn
υ+Δυ
ΔS
Δϕ
Δϕ
n’
n
R
R
τ
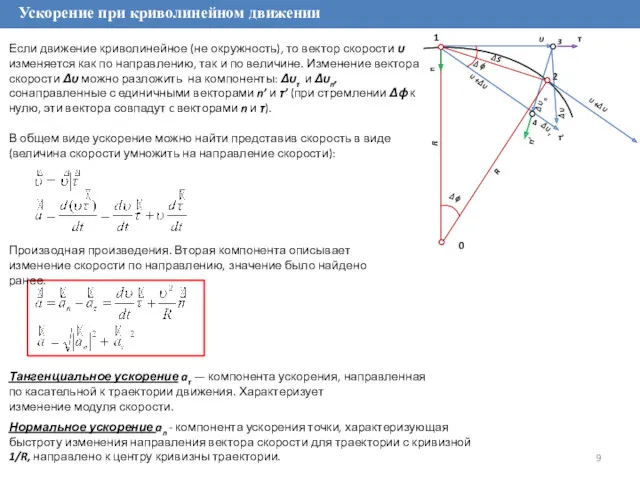
Если движение криволинейное (не окружность), то вектор
Ускорение при криволинейном движении
1
2
0
3
4
υ
υ+Δυ
Δυn
υ+Δυ
ΔS
Δϕ
Δϕ
n’
n
R
R
τ
Если движение криволинейное (не окружность), то вектор
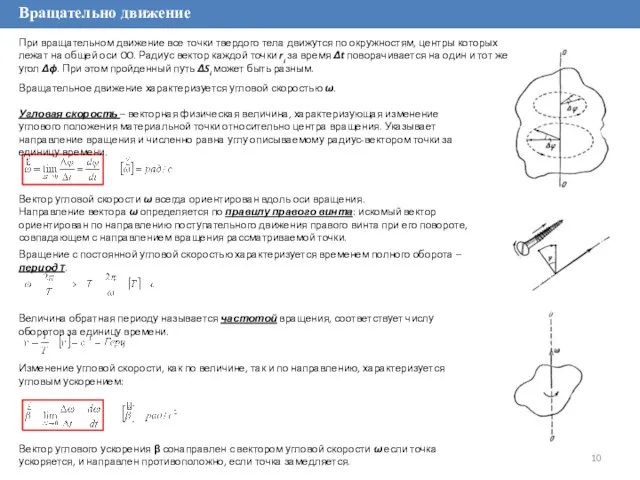
Вращение с постоянной угловой скоростью характеризуется временем полного оборота – период
Вращение с постоянной угловой скоростью характеризуется временем полного оборота – период
 Физика горных пород. Жидкости и газы в горных породах
Физика горных пород. Жидкости и газы в горных породах Количество теплоты. Внутренняя энергия тела
Количество теплоты. Внутренняя энергия тела Презентация по физике для 9 класса
Презентация по физике для 9 класса Сила тяжести. Явление тяготения - презентация к уроку для 8 класса коррекционной школы для детей с ОВЗ
Сила тяжести. Явление тяготения - презентация к уроку для 8 класса коррекционной школы для детей с ОВЗ Интеграция школьного курса физики с дисциплинами гуманитарного цикла
Интеграция школьного курса физики с дисциплинами гуманитарного цикла Система питания дизельного двигателя внутреннего сгорания. (Тема 10.2)
Система питания дизельного двигателя внутреннего сгорания. (Тема 10.2) Кернеу мен потенциалды өлшейтін құралдар
Кернеу мен потенциалды өлшейтін құралдар конспект урока - игры по теме Тепловые явления
конспект урока - игры по теме Тепловые явления Механика. Подготовка к контрольной работе
Механика. Подготовка к контрольной работе Свисты-волны ОНЧ диапазона (1-30 кГц) в магнитосфере
Свисты-волны ОНЧ диапазона (1-30 кГц) в магнитосфере Магнітне поле постійного струму
Магнітне поле постійного струму Вихретоковый неразрушающий контроль
Вихретоковый неразрушающий контроль Особенности распространения радиоволн коротковолнового диапазона
Особенности распространения радиоволн коротковолнового диапазона Гирдромеханические передачи
Гирдромеханические передачи Измерение коэффициента трения скольжения
Измерение коэффициента трения скольжения Работа, мощность, энергия
Работа, мощность, энергия Гидродинамика - это раздел гидравлики, изучающий закономерности движущихся жидкостей (потоков жидкостей)
Гидродинамика - это раздел гидравлики, изучающий закономерности движущихся жидкостей (потоков жидкостей) Современный урок физики в аспекте реализации ФГОС
Современный урок физики в аспекте реализации ФГОС Контрольная работа по теме Механическое движение. Взаимодействие тел
Контрольная работа по теме Механическое движение. Взаимодействие тел Буфера в лифтах
Буфера в лифтах Второй и третий законы Ньютона
Второй и третий законы Ньютона Оптические приборы
Оптические приборы Жидкое агрегатное состояние вещества
Жидкое агрегатное состояние вещества Моделирование физических процессов
Моделирование физических процессов Технологический процесс изготовления детали валик
Технологический процесс изготовления детали валик Презентация к уроку: Удивительный мир кристаллов
Презентация к уроку: Удивительный мир кристаллов Оптичні прилади, та їх застосування
Оптичні прилади, та їх застосування Такты работы ДВС
Такты работы ДВС