- Выбор и обоснование узлов приводов робота - манипулятора для загрузочных операций

Содержание
- 2. Постановка задачи Провести анализ работы следящей системы электропривода промышленного робота Провести синтез динамических характеристик следящего привода
- 3. Напольный промышленный робот МРУ-901. 1-2-3-4 - последовательность действий робота
- 4. Обзор приводов промышленного робота Промышленный робот (ПР) Электромеханический привод Обладает высокой надежностью, точностью, бесшумностью, легкостью регулирования,
- 5. Конец Начало Задать координаты точек позиционирования: исходной и тары Перенести захватное устройство в исходное положение По
- 6. ФБ1,ФБ2- функциональные блоки; УМ- усилитель мощности; ДС- датчик скорости; Р- редуктор; ДП- датчик положения;
- 7. Построение структурной схемы системы
- 8. В результате можно построить структурную схему системы МН ПР i
- 9. Многоканальная структура следящих систем промышленного робота Контуры регулирования электропривода: W1 - регулятор положения; W2 - регулятор
- 10. Расчет электромеханического следящего привода
- 11. Математическая модель разомкнутого привода
- 12. Структурная схема моделирования
- 13. Исходная ЛАЧХ И ФЧХ
- 14. Полученная ЛАЧХ и ФЧХ
- 15. График переходного процесса ( в программе Matlab)
- 16. Заключение В данной дипломной работе приведен обзор следящих электромеханических приводов промышленных роботов, представлены назначение и основные
- 17. Спасибо за внимание!!!
- 19. Скачать презентацию
Постановка задачи
Провести анализ работы следящей системы электропривода промышленного робота
Провести синтез динамических
Постановка задачи
Провести анализ работы следящей системы электропривода промышленного робота
Провести синтез динамических
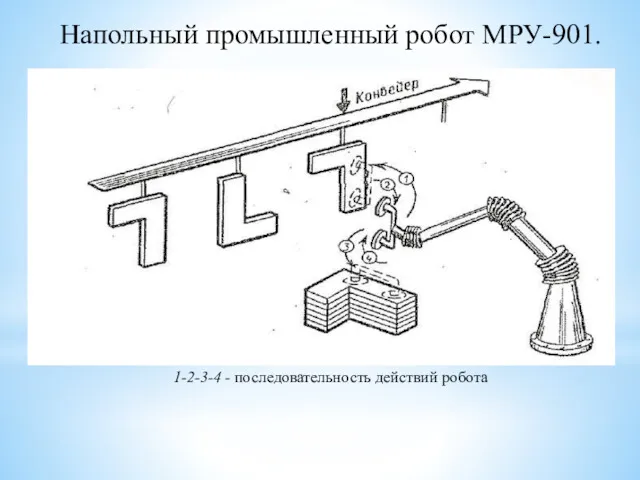
Напольный промышленный робот МРУ-901.
1-2-3-4 - последовательность действий робота
Напольный промышленный робот МРУ-901.
1-2-3-4 - последовательность действий робота
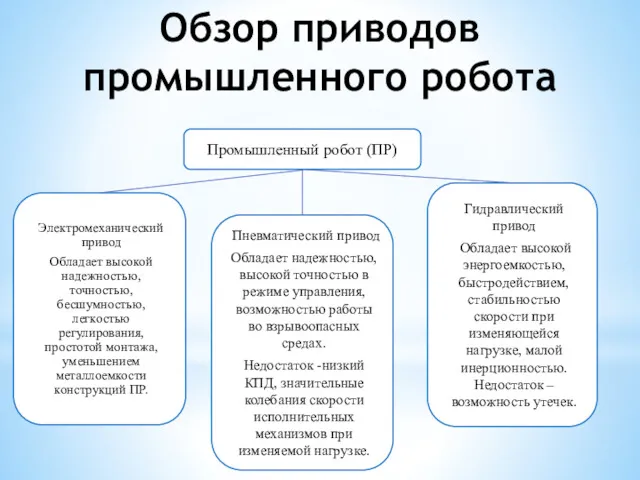
Обзор приводов промышленного робота
Промышленный робот (ПР)
Электромеханический привод
Обладает высокой надежностью, точностью, бесшумностью,
Обзор приводов промышленного робота
Промышленный робот (ПР)
Электромеханический привод
Обладает высокой надежностью, точностью, бесшумностью,
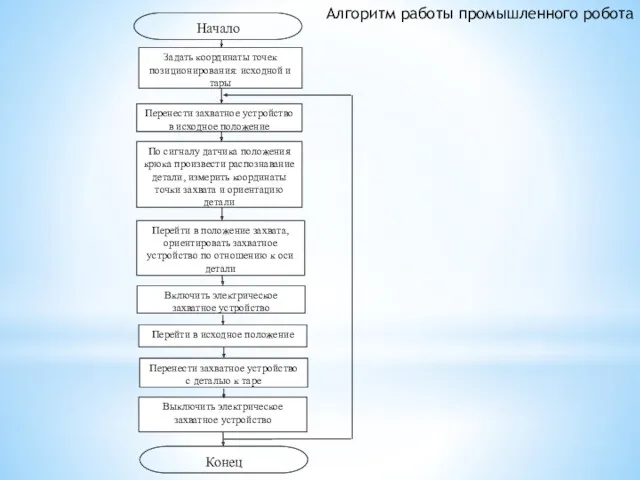
Конец
Начало
Задать координаты точек позиционирования: исходной и тары
Перенести захватное устройство в исходное
Конец
Начало
Задать координаты точек позиционирования: исходной и тары
Перенести захватное устройство в исходное
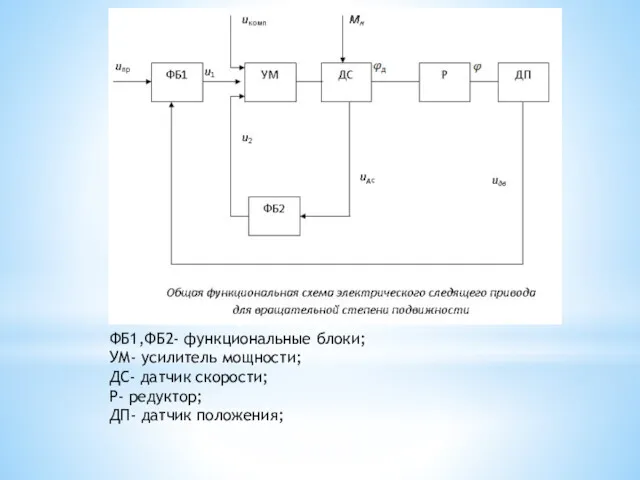
ФБ1,ФБ2- функциональные блоки;
УМ- усилитель мощности;
ДС- датчик скорости;
Р- редуктор;
ДП- датчик положения;
ФБ1,ФБ2- функциональные блоки;
УМ- усилитель мощности;
ДС- датчик скорости;
Р- редуктор;
ДП- датчик положения;
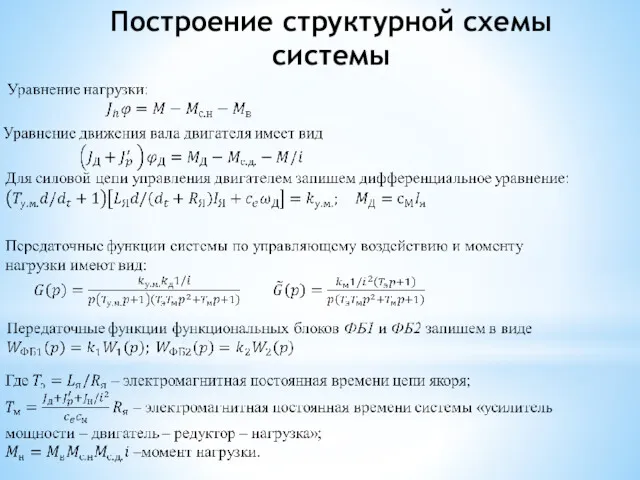
Построение структурной схемы системы
Построение структурной схемы системы
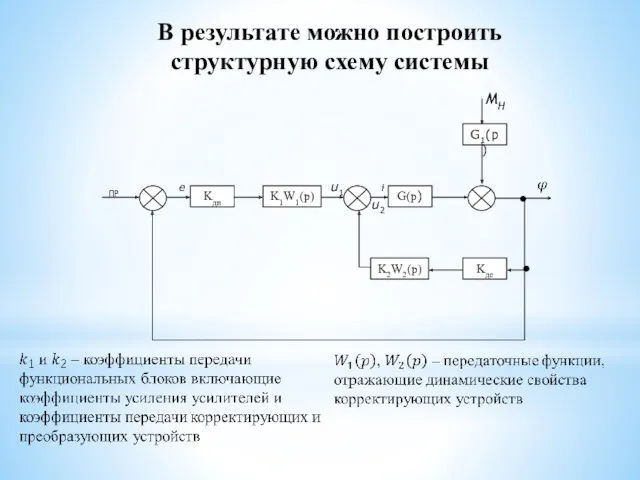
В результате можно построить структурную схему системы
МН
ПР
i
В результате можно построить структурную схему системы
МН
ПР
i

Многоканальная структура следящих систем промышленного робота
Контуры регулирования электропривода: W1 - регулятор
Многоканальная структура следящих систем промышленного робота
Контуры регулирования электропривода: W1 - регулятор
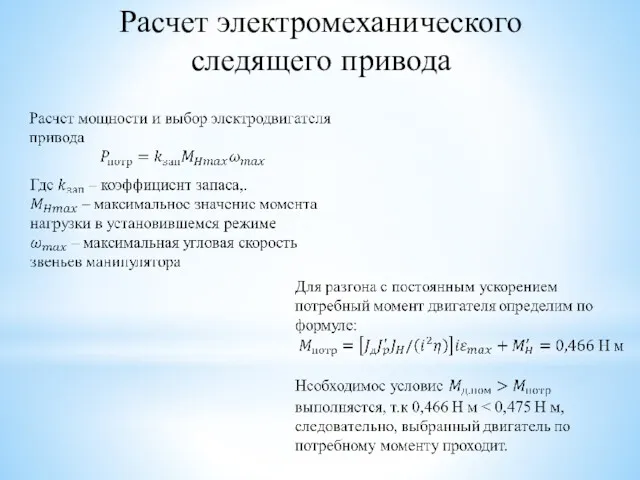
Расчет электромеханического следящего привода
Расчет электромеханического следящего привода
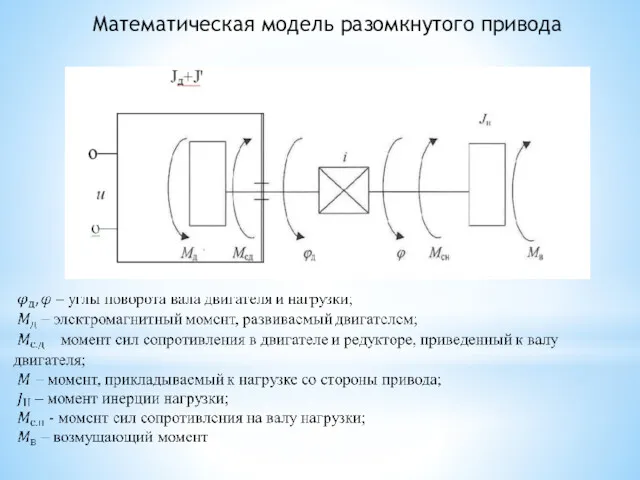
Математическая модель разомкнутого привода
Математическая модель разомкнутого привода
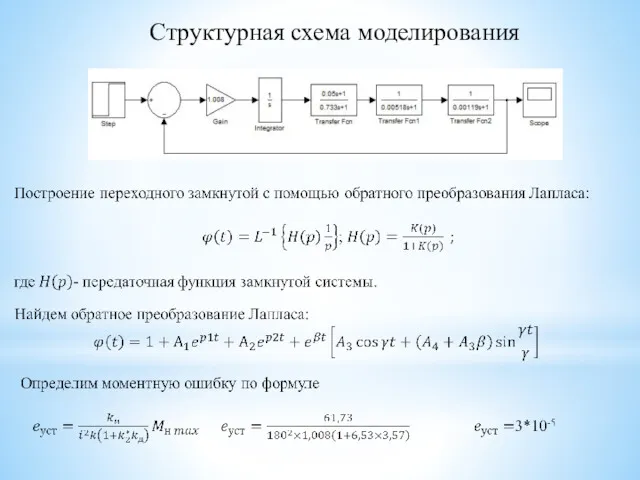
Структурная схема моделирования
Структурная схема моделирования
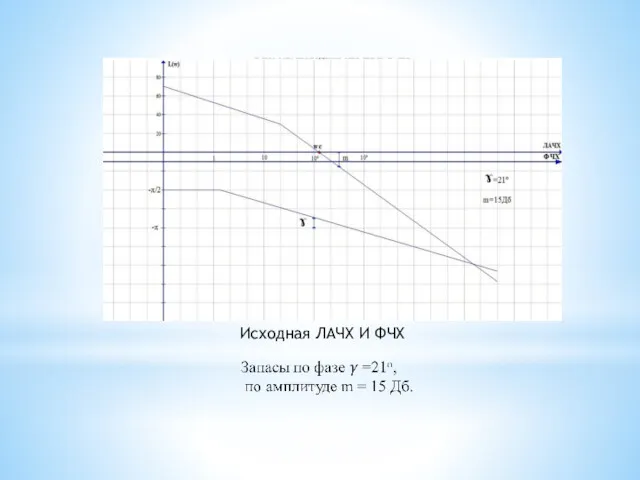
Исходная ЛАЧХ И ФЧХ
Исходная ЛАЧХ И ФЧХ
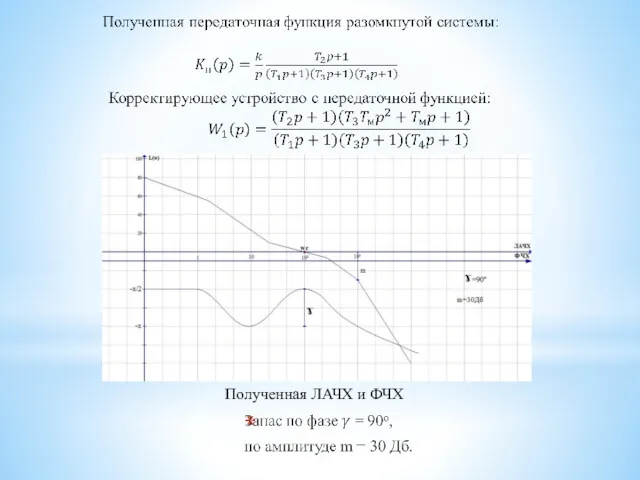
Полученная ЛАЧХ и ФЧХ
Полученная ЛАЧХ и ФЧХ
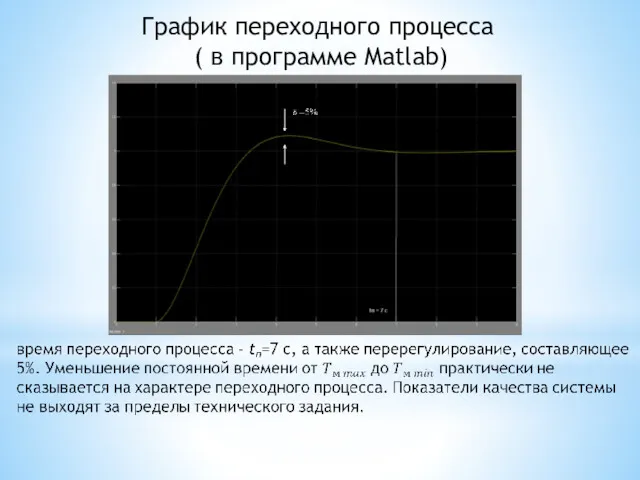
График переходного процесса
( в программе Matlab)
График переходного процесса
( в программе Matlab)
Заключение
В данной дипломной работе приведен обзор следящих электромеханических приводов промышленных роботов,
Заключение
В данной дипломной работе приведен обзор следящих электромеханических приводов промышленных роботов,
Спасибо за внимание!!!
Спасибо за внимание!!!
 Повторяем тему Механическая работа
Повторяем тему Механическая работа Устройство, неисправности и ремонт источников электроэнергии (аккумулятор, генератор) автомобиля Лада-калина
Устройство, неисправности и ремонт источников электроэнергии (аккумулятор, генератор) автомобиля Лада-калина Шпоночное и штифтовое соединения
Шпоночное и штифтовое соединения Явище електромагнітної індукції. Досліди Фарадея. Правило Ленца
Явище електромагнітної індукції. Досліди Фарадея. Правило Ленца Методи огляду простору. Вторинне випромінювання радіохвиль
Методи огляду простору. Вторинне випромінювання радіохвиль Электрические цепи синусоидального тока. Лекция 2
Электрические цепи синусоидального тока. Лекция 2 Внеклассное мероприятие Конкурс изобретателей
Внеклассное мероприятие Конкурс изобретателей Металлы. Общая характеристика
Металлы. Общая характеристика 7 нче сыйныф Көч берәмлекләре
7 нче сыйныф Көч берәмлекләре Динамика поступательного движения
Динамика поступательного движения Жартылай өткізгіштер:кі өткізгішті бір
Жартылай өткізгіштер:кі өткізгішті бір Уравнения состояния термодинамических систем
Уравнения состояния термодинамических систем Дисперсия света
Дисперсия света Беттік құбылыстар және дисперсттік жүйеге кіріспе. Дәріс 1
Беттік құбылыстар және дисперсттік жүйеге кіріспе. Дәріс 1 Тема урока. Решение задач по теме: Электрические явления.
Тема урока. Решение задач по теме: Электрические явления. Тепловые двигатели и охрана окружающей среды
Тепловые двигатели и охрана окружающей среды Изучение конструкций и методов расчета подъемно-транспортных машин
Изучение конструкций и методов расчета подъемно-транспортных машин Презентация Образование осадков
Презентация Образование осадков Закон Архимеда. Плавание судов
Закон Архимеда. Плавание судов Основы гидравлики
Основы гидравлики Ремонт автомобилей. Классификация способов восстановления деталей. (Тема 3.1)
Ремонт автомобилей. Классификация способов восстановления деталей. (Тема 3.1) презентация Строение атмосферы Солнца
презентация Строение атмосферы Солнца Соединения деталей. Виды изделий. Резьбовые соединения
Соединения деталей. Виды изделий. Резьбовые соединения Моделирование электрофизических свойств gaas методом монте-карло
Моделирование электрофизических свойств gaas методом монте-карло Кинематика поступательного и вращательного движений. Лекция 1
Кинематика поступательного и вращательного движений. Лекция 1 Шпоночное и штифтовое соединение
Шпоночное и штифтовое соединение интегрированный урок физика+математика
интегрированный урок физика+математика плоское зеркало
плоское зеркало