- XVIII және XIX ғ. басындағы механиканың дамуы

Содержание
- 2. Дәріс жоспары 1. Даламбер принципі 2. Аналитикалық механиканың негіздері
- 3. 1. Даламбер принципі. Инерция күші Бұрын Даламбер принципі (1743ж), Ньютонның заңдарына қарағанда, тек еркін емес механикалық
- 4. материалық нүкте үшін Даламбер принципін кҿрсетеді: қозғалыстағы материалық нүктеге түсірілген актив күштер, байланыс реакциялар және инерция
- 5. Механикалық жүйе үшін Даламбер принципі N материалық нүктелерден құрылған механикалық жүйені қарастырайық. Жүйенің ҽр нүктесі үшін
- 6. Даламбер принципі мен инерция күшінің ұғымы кинетостатика ҽдісінің негізі ұғым болып табылады, оның мақсаты - статика
- 7. Инерция күштердің бас векторы мен бас моменті Механикалық жүйе (мысалы, қатты дене) қозғалысын Даламбер принципі арқылы
- 8. Аналитикалық механиканың негіздері Аналитикалық механика – механикалық жүйенің тепе-теңдігімен қозғалысын зерттеу, механиканың дифференциалдық жҽне интегралдық принциптеріне
- 9. Байланыстар және оларды топтастыру Механикалық жүйенің нүктелері кеңістікте кез-келген орын алуға жҽне кез-келген жылдамдықтары болуы мүмкін
- 10. Жалпыланған координаттар Ҿзара тҽуелсіз кез-келген сҽтте механикалық жүйенің кеңістіктегі жағдайын бір мҽнді анықтайтын координаттар жалпыланған координаттар
- 11. Ықтималды орын ауыстыру. Механикалық жүйенің еркіндік дәрежесенің саны Материалық нүктенің қарастырылып отырған сәттегі орнынан тап сол
- 12. Голономдық байланыстары бар жүйенің бостандық дәрежесі тәуелсіз жалпыланған координаттардың санына тең. Голономдық емес жүйелердің жалпыланған координаттарының
- 13. Ықтималды орын ауыстыру принципі Механикалық жүйелердің тепе-теңдігінің аналитикалық шарттары Ж. Лагранждың іргелі жұмысы «Аналитикалық механика» -да
- 15. Скачать презентацию
Дәріс жоспары
1. Даламбер принципі
2. Аналитикалық механиканың негіздері
Дәріс жоспары
1. Даламбер принципі
2. Аналитикалық механиканың негіздері
1. Даламбер принципі.
Инерция күші Бұрын Даламбер принципі (1743ж), Ньютонның заңдарына қарағанда,
1. Даламбер принципі.
Инерция күші Бұрын Даламбер принципі (1743ж), Ньютонның заңдарына қарағанда,
материалық нүкте үшін Даламбер принципін кҿрсетеді: қозғалыстағы материалық нүктеге түсірілген актив
материалық нүкте үшін Даламбер принципін кҿрсетеді: қозғалыстағы материалық нүктеге түсірілген актив
Механикалық жүйе үшін Даламбер принципі
N материалық нүктелерден құрылған механикалық жүйені
Механикалық жүйе үшін Даламбер принципі
N материалық нүктелерден құрылған механикалық жүйені
Даламбер принципі мен инерция күшінің ұғымы кинетостатика ҽдісінің негізі ұғым болып
Даламбер принципі мен инерция күшінің ұғымы кинетостатика ҽдісінің негізі ұғым болып
Инерция күштердің бас векторы мен бас моменті
Механикалық жүйе (мысалы, қатты
Инерция күштердің бас векторы мен бас моменті
Механикалық жүйе (мысалы, қатты
Аналитикалық механиканың негіздері
Аналитикалық механика – механикалық жүйенің тепе-теңдігімен қозғалысын зерттеу, механиканың
Аналитикалық механиканың негіздері
Аналитикалық механика – механикалық жүйенің тепе-теңдігімен қозғалысын зерттеу, механиканың
Байланыстар және оларды топтастыру
Механикалық жүйенің нүктелері кеңістікте кез-келген орын алуға жҽне
Байланыстар және оларды топтастыру
Механикалық жүйенің нүктелері кеңістікте кез-келген орын алуға жҽне
Жалпыланған координаттар
Ҿзара тҽуелсіз кез-келген сҽтте механикалық жүйенің кеңістіктегі жағдайын бір мҽнді
Жалпыланған координаттар
Ҿзара тҽуелсіз кез-келген сҽтте механикалық жүйенің кеңістіктегі жағдайын бір мҽнді
Ықтималды орын ауыстыру. Механикалық жүйенің еркіндік дәрежесенің саны
Материалық нүктенің қарастырылып отырған
Ықтималды орын ауыстыру. Механикалық жүйенің еркіндік дәрежесенің саны
Материалық нүктенің қарастырылып отырған
Голономдық байланыстары бар жүйенің бостандық дәрежесі тәуелсіз жалпыланған координаттардың санына тең.
Голономдық
Голономдық байланыстары бар жүйенің бостандық дәрежесі тәуелсіз жалпыланған координаттардың санына тең.
Голономдық
Ықтималды орын ауыстыру принципі
Механикалық жүйелердің тепе-теңдігінің аналитикалық шарттары Ж. Лагранждың
Ықтималды орын ауыстыру принципі
Механикалық жүйелердің тепе-теңдігінің аналитикалық шарттары Ж. Лагранждың
 Электрическое поле в диэлектриках. Тема 5
Электрическое поле в диэлектриках. Тема 5 Электромагнитные устройства и трансформаторы
Электромагнитные устройства и трансформаторы презентация Атмосферное давление
презентация Атмосферное давление Основы радиопередачи и радиоприема
Основы радиопередачи и радиоприема Сельскохозяйственная техника Forte
Сельскохозяйственная техника Forte Гидравлический домкрат в быту
Гидравлический домкрат в быту Елементи теорії поля. (Лекція 10)
Елементи теорії поля. (Лекція 10) Основные понятия нанотехнологий. Оборудование
Основные понятия нанотехнологий. Оборудование Основные параметры эхо-метода
Основные параметры эхо-метода Электрические цепи. (1 класс)
Электрические цепи. (1 класс) Nükleer modeller
Nükleer modeller Газораспределительный механизм
Газораспределительный механизм Физика – наука о наиболее общих формах движения материи и их взаимных превращениях. Лекция №1
Физика – наука о наиболее общих формах движения материи и их взаимных превращениях. Лекция №1 Закон Ома для участка цепи, последовательное и параллельное соединение проводников. Физический диктант
Закон Ома для участка цепи, последовательное и параллельное соединение проводников. Физический диктант Презентация Великие физики
Презентация Великие физики Решение нестандартных задач по физике
Решение нестандартных задач по физике Слайды. Полупроводниковые материалы. (Лекция 6)
Слайды. Полупроводниковые материалы. (Лекция 6) Развитие творческих способностей обучающихся на уроках физики
Развитие творческих способностей обучающихся на уроках физики Будова атомного ядра
Будова атомного ядра Презентация к уроку Закон Джоуля-Ленца
Презентация к уроку Закон Джоуля-Ленца История связи. Виды телеграфной связи и основные этапы ее развития
История связи. Виды телеграфной связи и основные этапы ее развития Radiation-induced desorption of excited atoms from solid nitrogen
Radiation-induced desorption of excited atoms from solid nitrogen Урок - КВН по теме: Взаимодействие тел. Силы в природе
Урок - КВН по теме: Взаимодействие тел. Силы в природе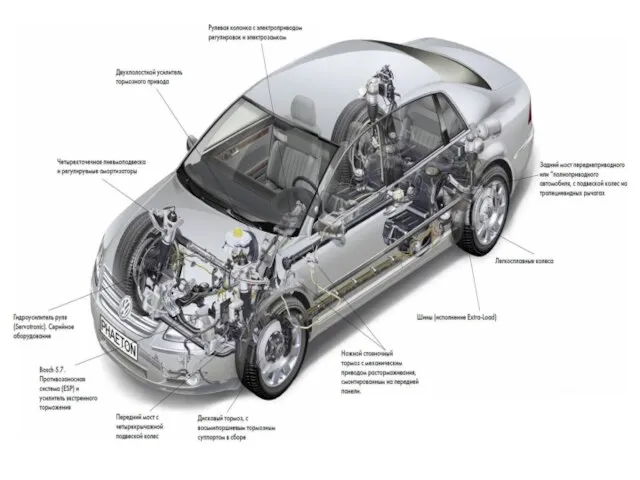 Ходовая автомобиля
Ходовая автомобиля Восстановление деталей способом пластического деформирования
Восстановление деталей способом пластического деформирования Ремонт електродвигунів. Самостійна робота з відповідями
Ремонт електродвигунів. Самостійна робота з відповідями Технология разборочных и моечно-очистных работ
Технология разборочных и моечно-очистных работ Импульс тела. Закон сохранения импульса
Импульс тела. Закон сохранения импульса