- Задачи, решаемые специализированными ТВ системами

Содержание
- 2. Позиционирование в задачах калибровки, юстировки, коррекции
- 3. Возникают такие задачи достаточно часто, когда имеется необходимость обеспечения высокой точности пространственной ориентации одного объекта относительно
- 4. Смещение, скручивание и изгиб
- 5. Позиционирование в задачах калибровки, юстировки, коррекции Корректировка возможна с помощью оптической системы привязки Блок – схема
- 6. Смещение изображения контрольных источников на ТВ матрицах O → O’ X1
- 7. Л 11 - 26 Координаты центра тяжести пятна засветки ∑j Nj - суммарное количество засвеченных элементов
- 8. Преобразование систем координат X = x0 + x * cos Θ - y* sin Θ Y
- 9. Блок-схема алгоритма нахождения координат центра тяжести пятна проекции контрольного элемента.
- 10. Структурная схема системы оптической привязки
- 11. Cубпиксельная точность определения координат Накладывая матрицу-маску на области исходной матрицы, проводя поэлементное вычитание и последовательно перемещая
- 12. Принцип субпиксельного измерения Oбработка информации о засветке ПЗС – матрицы от ТИС удаленного объекта в ПК
- 13. Изображение при отсутствии боковой засветки.
- 14. Локационная интерферометрия
- 15. Задачи осевого центрирования объекта
- 17. Разработка подвижного узла облучателя Разработка принципа проведения юстировочных работ для выставления облучателя в фокусе и на
- 18. Принцип выставления облучателя в фокусе и на оси антенны.
- 24. ЛАЗЕРНАЯ ДИСТАНЦИОННАЯ ДИАГНОСТИКА
- 25. Оптические системы исследования получили бурное развитие с появлением лазеров – принципиально новых когерентных источников оптического диапазона.
- 26. Оптические системы исследования Оптической локационной системой (ОЛС) называют систему обнаружения, измерения координат и параметров движения обнаруженных
- 27. Структурная схема оптической локационной системы
- 28. Обработка информации проводится в соответствии с выбранным методом дистанционной диагностики. Структурная схема лидаров практически совпадает со
- 29. LOTIS Tii Лазер light amplification by stimulated emission of radiation оптический квантовый генератор - это устройство,
- 30. Особенности дистанционной диангостики Применение лазерного излучения для решения проблем состояния окружающей среды имеет ряд несомненных преимуществ
- 31. Объекты исследования Это либо рассеянное (поглощенное) излучение на частоте лазерного излучения, либо излучение, частота которого определяется
- 32. Периодическая таблица Менделеева Д.И.
- 33. Вращательно-колебательная структура
- 34. Схема проведения лазерного дистанционного зондирования Схема проведения лазерного дистанционного зондирования
- 35. Лидарное уравнение - энергия регистрируемого излучения на длине волны λ, объект находится на расстоянии R от
- 36. Типы взаимодействия лазерного излучения с веществом Различают типы взаимодействия, связаные с: * рассеянием Релея; * рассеянием
- 37. Дифференциальное сечение процесса и при классическом, и при квантовом описании является количественной характеристикой рассеяния (преобразования) света,
- 38. Методы лазерной дистанционной диагностики Релеевское рассеяние Лазерное излучение упруго рассеянное атомами или молекулами наблюдается на частоте
- 39. Комбинационное рассеяние Лазерное излучение взаимодействует с молекулой, отклик наблюдается с характеристическим частотным сдвигом, νd= ν j
- 40. Релеевское рассеяние , , Ринд.=α Е, Ринд = λ=2πc/ω n N Конфигурация рассеяния эл.-маг. Излучения электроном
- 41. Ми -рассеяние Ми - рассеяние – это рассеяние на аэрозольных частицах, ядрах Айткена, частицах пыли, облаков,
- 42. Параметры -фактор эффективности обратного рассеяния Ми - Qπ; --объемный коэффициент обратного рассеяния βπ ; -полный объемный
- 43. Нормальное распределение частиц для некоторых типов облаков. 1 газ; 2- кучевые облака при ясной погоде; 3-
- 44. Метод дистанционной диагностики, основанный на поглощении лазерного излучения Поглощение с резонансным изменением дипольного момента разрешенного оптического
- 45. Дифференциальное поглощение Χ = σ0N0ΔR Рис. Метод ДПР, определение содержания NO2 в шлейфе дымовой трубы: а,
- 46. * комбинационным рассеянием (Рамана); * вынужденной флуоресценцией. При КР лазерное излучение взаимодействует с молекулой, отклик наблюдается
- 47. Ринд.=α Е, Ринд = Конфигурация рассеяния эл.-маг. Излучения электроном 0 Осциллирующие компоненты КОМБИНАЦИОННОЕ РАССЕЯНИЕ
- 48. Метод дистанционной диагностики, основанный на кобинационном рассеянии (ω - ω1)t и (ω + ω1)t Δ v=
- 49. Спектр КР задымленной атмосферы. Основные компоненты воздушной среды
- 50. Лидарное уравнение - энергия регистрируемого излучения на длине волны λ, объект находится на расстоянии R от
- 51. Лидарное уравнение для метода КР ϕ(λ)- коэффициент спектрального пропускания приемной оптической системы; Т(R) - общий коэффициент
- 52. Особенности метода КР — практическая безынерционность процессов КР (переизлучение происходит уже через время порядка (10-14 -10-15)
- 53. ΔN2 Δ νs ν0 ναs
- 54. Вращательно-колебательная структура
- 55. Метод дистанционной диагностики, основанный на лазерно - индуцированной флуоресценции Схемы переходов в молекуле при вынужденной флуоресценции
- 57. . Спектры флуоресценции чистых растительных пигментов + - флавопротеина, ▄ - хлорофилла, ο - витамина К1,
- 58. Спектры флуоресценции древестной растительности Спектры ЛИФ листьев (при облучении Ar+ - лазером) а) 1- томат (сорт
- 59. Зависимость спектров ЛИФ от режима полива а) Лимонное дерево б) Огурец (сорт ТСХА 412) в) Помидор
- 60. Зависимость спектров ЛИФ бобовых от воздействия гербицидов Зависимость спектров ЛИФ зеленых растений от режима питания
- 61. ЛИФ в медицине Спектр ЛИФ от почки а) и предстательной железы б) крысы 1- здоровый орган,
- 62. Регистрация спец. веществ методом ЛИФ Корректировочные спектры ЛИФ экстрактов НВ , λ0 =290нм мкм I,отн.ед Корректировочные
- 63. Лидарное уравнение для ЛИФ оптической системы в диапазоне λ, λ+ Δ λ); F( λ, λL )
- 64. При этом «распознавание» понимается как задача преобразования входной информации, в качестве которой уместно рассматривать некоторые параметры,
- 65. РАСПОЗНАВАНИЕ Рис 12.11 Представление чисел в формате 3х5 0 = 1,1,1 1= 0,0,1 1,0,1 0,1,1 1,0,1
- 66. Л12 - 17 Основные принципы распознавания образов Распознавание – это отнесение конкретного объекта (реализации), представленного значениями
- 67. Дистанционное зондирование как задача распознавания образов Ω j , Ωj ∈ Ω j= 1, …,m xi
- 68. Распознавание В случае, если выбранная величина L данного объекта (допустим ω), с каким – либо классом
- 69. Л12 - 18 Системы распознавания могут быть: -простые; -сложные одноуровневые; -сложные многоуровневые; -обучающиеся системы Алгоритмы распознавания
- 70. Л12 - 19 Тогда величина условного риска R, связанная с решением вида при условии, что имеет
- 71. ИСПОЛЬЗОВАНИЕ МЕТОДОВ ДИСТАНЦИОННОЙ ДИАГНОСТИКИ ДЛЯ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ Привлекая дистанционные ЛИФ и КР методы для решения конкретных
- 72. Выбранные и измеренные параметры спектра КР и ЛИФ, и спектр затухания флуоресценции образуют «визитную карточку» исследуемого
- 73. РАСПОЗНАВАНИЕ ОБРАЗОВ В СЛУЧАЕ ЛИФ LF(λ) с возбужденного уровня ⎢ r 〉 на нижние уровни ⎢
- 74. Фоны и шумы Представление объекта в виде вектора характеристических параметров позволяет использовать математические методы распознавания для
- 75. ФОНЫ
- 76. Техническое решение лидарного комплекса Предлагаемый подход к идентификации объектов решает вопросы автоматизации процесса распознавания, позволяет сформировать
- 77. Реализация Обработка спектров Смысл алгоритма обработки заключается в следующем : Устройство (будет описано ниже) анализирует спектры
- 79. Экспериментально наблюдаемый сигнал КР определяется числом зарегистрированных фотоэлектронов на выходе фотоприемника Nе N0 – число фотонов
- 80. Минимально обнаруживаемая концентрация где N Ф; Nт — шумовой сигнал в фотоэлектронах, вызванный фоном неба и
- 81. Eсли концентрация ρ в пределах зондируемого участка R2-R1 постоянна, то Для определения МОК измеряемого загрязнителя необходимо
- 82. От длины волны в сильной степени зависят такие величины, как квантовая эффективность фотоприемника η1(λ), сечение рассеяния
- 83. б) Согласно уравнению (18) принимаемый сигнал КР пропорционален эффективной площади приемного объектива S. Диаметр приемного объектива
- 84. Лидар должен обладать следующими тактико-техническими характеристиками: - лазерный передатчик в этом КР- лидаре должен излучать в
- 85. Л12 - 15 - в геологоразведке, в медицине Возможные области применения комплекса лидара Комплекс предназначен для
- 86. Сфера применимости такого лидарного комплекса - исследование и контроль загрязняющих веществ в атмосфере; - непрерывный контроль
- 87. для поисковых и контролирующих служб по чрезвычайным ситуациям, - на таможне для контроля за контрабандными перемещениями
- 88. Оптико-механический пост станции «ОКА»
- 90. Некоторые характеристики объектов исследования Название Природа Действующее Элюент для ТСХН Ввещество Опий и Опий - свернувшийся
- 92. Литература [1] Жутяева Т.К. //Локационные методы исследования объектов и сред в оптическом и акустическом диапазонах [2]
- 93. [9] Малашин М.С., Каминский Р.П., Борисов Ю.Б. //Основы проецирования лазерных локационных систем, -Москва, Высшая школа 1983,
- 94. [18] Measures R.M., Garlic J. //Laser induced spectral signatures of relevance to environmental sensing, Can. J.
- 97. Скачать презентацию

Позиционирование в
задачах калибровки,
юстировки, коррекции
Позиционирование в
задачах калибровки,
юстировки, коррекции

Возникают такие задачи достаточно часто, когда имеется необходимость обеспечения высокой точности
Возникают такие задачи достаточно часто, когда имеется необходимость обеспечения высокой точности

Смещение, скручивание
и изгиб
Смещение, скручивание
и изгиб

Позиционирование в задачах калибровки,
юстировки, коррекции
Корректировка возможна с помощью
Позиционирование в задачах калибровки,
юстировки, коррекции
Корректировка возможна с помощью

Смещение изображения контрольных источников на ТВ матрицах
O → O’
X1
Смещение изображения контрольных источников на ТВ матрицах
O → O’
X1

Л 11 - 26
Координаты центра тяжести пятна засветки
∑j Nj -
Л 11 - 26
Координаты центра тяжести пятна засветки
∑j Nj -

Преобразование систем координат
X = x0 + x * cos Θ
Преобразование систем координат
X = x0 + x * cos Θ

Блок-схема алгоритма нахождения координат центра тяжести пятна проекции контрольного элемента.
Блок-схема алгоритма нахождения координат центра тяжести пятна проекции контрольного элемента.

Структурная схема системы оптической привязки
Структурная схема системы оптической привязки

Cубпиксельная точность определения координат
Накладывая матрицу-маску на области исходной матрицы, проводя
Cубпиксельная точность определения координат
Накладывая матрицу-маску на области исходной матрицы, проводя

Принцип субпиксельного измерения
Oбработка информации о засветке ПЗС – матрицы от ТИС
Принцип субпиксельного измерения
Oбработка информации о засветке ПЗС – матрицы от ТИС

Изображение при отсутствии боковой засветки.
Изображение при отсутствии боковой засветки.

Локационная интерферометрия
Локационная интерферометрия

Задачи осевого центрирования объекта
Задачи осевого центрирования объекта


Разработка подвижного узла облучателя
Разработка принципа проведения юстировочных работ для выставления облучателя
Разработка подвижного узла облучателя
Разработка принципа проведения юстировочных работ для выставления облучателя

Принцип выставления облучателя в фокусе и на оси антенны.
Принцип выставления облучателя в фокусе и на оси антенны.






ЛАЗЕРНАЯ ДИСТАНЦИОННАЯ ДИАГНОСТИКА
ЛАЗЕРНАЯ ДИСТАНЦИОННАЯ ДИАГНОСТИКА

Оптические системы исследования получили бурное развитие с появлением лазеров – принципиально
Оптические системы исследования получили бурное развитие с появлением лазеров – принципиально

Оптические системы исследования
Оптической локационной системой (ОЛС) называют систему обнаружения, измерения координат
Оптические системы исследования
Оптической локационной системой (ОЛС) называют систему обнаружения, измерения координат

Структурная схема оптической локационной системы
Структурная схема оптической локационной системы

Обработка информации проводится в соответствии с выбранным методом дистанционной диагностики.
Структурная
Обработка информации проводится в соответствии с выбранным методом дистанционной диагностики.
Структурная

LOTIS Tii
Лазер light amplification by stimulated emission of radiation
оптический квантовый генератор -
LOTIS Tii
Лазер light amplification by stimulated emission of radiation
оптический квантовый генератор -

Особенности дистанционной диангостики
Применение лазерного излучения для решения проблем состояния окружающей среды
Особенности дистанционной диангостики
Применение лазерного излучения для решения проблем состояния окружающей среды

Объекты исследования
Это либо рассеянное (поглощенное) излучение на частоте лазерного излучения, либо
Объекты исследования
Это либо рассеянное (поглощенное) излучение на частоте лазерного излучения, либо

Периодическая таблица Менделеева Д.И.
Периодическая таблица Менделеева Д.И.

Вращательно-колебательная структура
Вращательно-колебательная структура

Схема проведения лазерного дистанционного зондирования
Схема проведения лазерного дистанционного зондирования
Схема проведения лазерного дистанционного зондирования
Схема проведения лазерного дистанционного зондирования

Лидарное уравнение
- энергия регистрируемого излучения на длине волны λ, объект
Лидарное уравнение
- энергия регистрируемого излучения на длине волны λ, объект

Типы взаимодействия лазерного излучения с веществом
Различают типы взаимодействия,
связаные с:
* рассеянием
Типы взаимодействия лазерного излучения с веществом
Различают типы взаимодействия,
связаные с:
* рассеянием

Дифференциальное сечение процесса и при классическом, и при квантовом описании является
Дифференциальное сечение процесса и при классическом, и при квантовом описании является

Методы лазерной дистанционной диагностики
Релеевское
рассеяние
Лазерное излучение упруго рассеянное атомами или
Методы лазерной дистанционной диагностики
Релеевское
рассеяние
Лазерное излучение упруго рассеянное атомами или

Комбинационное рассеяние
Лазерное излучение взаимодействует с молекулой, отклик наблюдается с характеристическим частотным
Комбинационное рассеяние
Лазерное излучение взаимодействует с молекулой, отклик наблюдается с характеристическим частотным

Релеевское рассеяние
, ,
Ринд.=α Е,
Ринд =
λ=2πc/ω
n
N
Конфигурация
Релеевское рассеяние
, ,
Ринд.=α Е,
Ринд =
λ=2πc/ω
n
N
Конфигурация

Ми -рассеяние
Ми - рассеяние – это рассеяние на аэрозольных частицах,
Ми -рассеяние
Ми - рассеяние – это рассеяние на аэрозольных частицах,

Параметры
-фактор эффективности обратного рассеяния Ми - Qπ; --объемный коэффициент обратного рассеяния
Параметры
-фактор эффективности обратного рассеяния Ми - Qπ; --объемный коэффициент обратного рассеяния

Нормальное распределение частиц для некоторых типов облаков.
1 газ; 2- кучевые облака
Нормальное распределение частиц для некоторых типов облаков.
1 газ; 2- кучевые облака

Метод дистанционной диагностики, основанный на поглощении лазерного излучения
Поглощение с резонансным изменением
Метод дистанционной диагностики, основанный на поглощении лазерного излучения
Поглощение с резонансным изменением

Дифференциальное поглощение
Χ = σ0N0ΔR
Рис. Метод ДПР, определение содержания NO2 в
Дифференциальное поглощение
Χ = σ0N0ΔR
Рис. Метод ДПР, определение содержания NO2 в

* комбинационным рассеянием (Рамана);
* вынужденной флуоресценцией.
При КР лазерное излучение взаимодействует
* комбинационным рассеянием (Рамана);
* вынужденной флуоресценцией.
При КР лазерное излучение взаимодействует

Ринд.=α Е,
Ринд =
Конфигурация рассеяния эл.-маг. Излучения электроном
0
Осциллирующие компоненты
КОМБИНАЦИОННОЕ
Ринд.=α Е,
Ринд =
Конфигурация рассеяния эл.-маг. Излучения электроном
0
Осциллирующие компоненты
КОМБИНАЦИОННОЕ

Метод дистанционной диагностики, основанный на кобинационном рассеянии
(ω - ω1)t и (ω
Метод дистанционной диагностики, основанный на кобинационном рассеянии
(ω - ω1)t и (ω

Спектр КР задымленной атмосферы.
Основные компоненты воздушной среды
Спектр КР задымленной атмосферы.
Основные компоненты воздушной среды

Лидарное уравнение
- энергия регистрируемого излучения на длине волны λ, объект
Лидарное уравнение
- энергия регистрируемого излучения на длине волны λ, объект

Лидарное уравнение для метода КР
ϕ(λ)- коэффициент спектрального пропускания приемной оптической системы;
Лидарное уравнение для метода КР
ϕ(λ)- коэффициент спектрального пропускания приемной оптической системы;

Особенности метода КР
— практическая безынерционность процессов КР (переизлучение происходит уже через
Особенности метода КР
— практическая безынерционность процессов КР (переизлучение происходит уже через

ΔN2
Δ
νs ν0 ναs
ΔN2
Δ
νs ν0 ναs

Вращательно-колебательная структура
Вращательно-колебательная структура

Метод дистанционной диагностики, основанный на лазерно - индуцированной флуоресценции
Схемы переходов
Метод дистанционной диагностики, основанный на лазерно - индуцированной флуоресценции
Схемы переходов


. Спектры флуоресценции чистых растительных пигментов
+ - флавопротеина, ▄ -
. Спектры флуоресценции чистых растительных пигментов
+ - флавопротеина, ▄ -

Спектры флуоресценции
древестной растительности
Спектры ЛИФ листьев (при облучении Ar+ -
Спектры флуоресценции
древестной растительности
Спектры ЛИФ листьев (при облучении Ar+ -

Зависимость спектров ЛИФ от режима полива
а) Лимонное дерево
б) Огурец (сорт
Зависимость спектров ЛИФ от режима полива
а) Лимонное дерево
б) Огурец (сорт

Зависимость спектров ЛИФ бобовых от воздействия гербицидов
Зависимость спектров ЛИФ зеленых растений
Зависимость спектров ЛИФ бобовых от воздействия гербицидов
Зависимость спектров ЛИФ зеленых растений

ЛИФ в медицине
Спектр ЛИФ от почки а) и предстательной железы б)
ЛИФ в медицине
Спектр ЛИФ от почки а) и предстательной железы б)

Регистрация спец. веществ методом ЛИФ
Корректировочные спектры ЛИФ экстрактов НВ , λ0
Регистрация спец. веществ методом ЛИФ
Корректировочные спектры ЛИФ экстрактов НВ , λ0

Лидарное уравнение для ЛИФ
оптической системы в диапазоне λ, λ+ Δ λ);
Лидарное уравнение для ЛИФ
оптической системы в диапазоне λ, λ+ Δ λ);

При этом «распознавание» понимается как задача преобразования входной информации, в качестве
При этом «распознавание» понимается как задача преобразования входной информации, в качестве

РАСПОЗНАВАНИЕ
Рис 12.11 Представление
чисел в формате 3х5
0 = 1,1,1 1= 0,0,1
РАСПОЗНАВАНИЕ
Рис 12.11 Представление
чисел в формате 3х5
0 = 1,1,1 1= 0,0,1

Л12 - 17
Основные принципы распознавания образов
Распознавание – это отнесение конкретного объекта (реализации),
Л12 - 17
Основные принципы распознавания образов
Распознавание – это отнесение конкретного объекта (реализации),

Дистанционное зондирование как задача распознавания образов
Ω j , Ωj ∈
Дистанционное зондирование как задача распознавания образов
Ω j , Ωj ∈

Распознавание
В случае, если выбранная величина L данного объекта (допустим ω), с
Распознавание
В случае, если выбранная величина L данного объекта (допустим ω), с

Л12 - 18
Системы распознавания могут быть:
-простые;
-сложные одноуровневые;
-сложные многоуровневые;
-обучающиеся системы
Алгоритмы распознавания
Л12 - 18
Системы распознавания могут быть:
-простые;
-сложные одноуровневые;
-сложные многоуровневые;
-обучающиеся системы
Алгоритмы распознавания

Л12 - 19
Тогда величина условного риска R, связанная с решением вида
Л12 - 19
Тогда величина условного риска R, связанная с решением вида

ИСПОЛЬЗОВАНИЕ МЕТОДОВ ДИСТАНЦИОННОЙ ДИАГНОСТИКИ ДЛЯ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ
Привлекая дистанционные ЛИФ и КР
ИСПОЛЬЗОВАНИЕ МЕТОДОВ ДИСТАНЦИОННОЙ ДИАГНОСТИКИ ДЛЯ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ
Привлекая дистанционные ЛИФ и КР

Выбранные и измеренные параметры спектра КР и ЛИФ, и спектр затухания
Выбранные и измеренные параметры спектра КР и ЛИФ, и спектр затухания

РАСПОЗНАВАНИЕ ОБРАЗОВ В СЛУЧАЕ ЛИФ
LF(λ)
с возбужденного уровня ⎢
r 〉
РАСПОЗНАВАНИЕ ОБРАЗОВ В СЛУЧАЕ ЛИФ
LF(λ)
с возбужденного уровня ⎢
r 〉

Фоны и шумы
Представление объекта в виде вектора характеристических параметров позволяет
Фоны и шумы
Представление объекта в виде вектора характеристических параметров позволяет

ФОНЫ
ФОНЫ

Техническое решение лидарного комплекса
Предлагаемый подход к идентификации объектов решает вопросы
Техническое решение лидарного комплекса
Предлагаемый подход к идентификации объектов решает вопросы

Реализация
Обработка спектров
Смысл алгоритма обработки заключается в следующем :
Устройство (будет
Реализация
Обработка спектров
Смысл алгоритма обработки заключается в следующем :
Устройство (будет


Экспериментально наблюдаемый сигнал КР определяется
числом зарегистрированных фотоэлектронов на выходе фотоприемника Nе
Экспериментально наблюдаемый сигнал КР определяется
числом зарегистрированных фотоэлектронов на выходе фотоприемника Nе

Минимально обнаруживаемая концентрация
где N Ф; Nт — шумовой сигнал в фотоэлектронах,
Минимально обнаруживаемая концентрация
где N Ф; Nт — шумовой сигнал в фотоэлектронах,

Eсли концентрация ρ в пределах зондируемого участка R2-R1 постоянна, то
Для
Eсли концентрация ρ в пределах зондируемого участка R2-R1 постоянна, то
Для

От длины волны в сильной степени зависят такие величины, как квантовая
От длины волны в сильной степени зависят такие величины, как квантовая

б) Согласно уравнению (18) принимаемый сигнал КР пропорционален эффективной площади приемного
б) Согласно уравнению (18) принимаемый сигнал КР пропорционален эффективной площади приемного

Лидар должен обладать следующими тактико-техническими характеристиками:
- лазерный передатчик в этом КР-
Лидар должен обладать следующими тактико-техническими характеристиками:
- лазерный передатчик в этом КР-

Л12 - 15
- в геологоразведке, в медицине
Возможные области применения комплекса
Л12 - 15
- в геологоразведке, в медицине
Возможные области применения комплекса

Сфера применимости такого лидарного комплекса
- исследование и контроль загрязняющих веществ
Сфера применимости такого лидарного комплекса
- исследование и контроль загрязняющих веществ

для поисковых и контролирующих служб по чрезвычайным ситуациям,
- на таможне
для поисковых и контролирующих служб по чрезвычайным ситуациям,
- на таможне

Оптико-механический пост станции «ОКА»
Оптико-механический пост станции «ОКА»


Некоторые характеристики объектов исследования
Название Природа Действующее Элюент для ТСХН
Ввещество Опий и
Некоторые характеристики объектов исследования
Название Природа Действующее Элюент для ТСХН
Ввещество Опий и

![Литература [1] Жутяева Т.К. //Локационные методы исследования объектов и сред](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/295832/slide-91.jpg)
Литература
[1] Жутяева Т.К. //Локационные методы исследования объектов и сред в оптическом и акустическом
Литература
[1] Жутяева Т.К. //Локационные методы исследования объектов и сред в оптическом и акустическом
![[9] Малашин М.С., Каминский Р.П., Борисов Ю.Б. //Основы проецирования лазерных](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/295832/slide-92.jpg)
[9] Малашин М.С., Каминский Р.П., Борисов Ю.Б. //Основы проецирования лазерных локационных систем,
[9] Малашин М.С., Каминский Р.П., Борисов Ю.Б. //Основы проецирования лазерных локационных систем,
![[18] Measures R.M., Garlic J. //Laser induced spectral signatures of](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/295832/slide-93.jpg)
[18] Measures R.M., Garlic J. //Laser induced spectral signatures of relevance to
[18] Measures R.M., Garlic J. //Laser induced spectral signatures of relevance to

 Методы и средства измерения частоты, временных интервалов и фазового сдвига
Методы и средства измерения частоты, временных интервалов и фазового сдвига Простые механизмы
Простые механизмы Самостоятельная робота на уроках физики
Самостоятельная робота на уроках физики Imitation of low voltage DC arc
Imitation of low voltage DC arc Оборудование для заземления нейтрали в сетях 6-35 кВ
Оборудование для заземления нейтрали в сетях 6-35 кВ Вес тела. Единицы силы. Связь между силой тяжести и массой тела. Физика. 7 класс
Вес тела. Единицы силы. Связь между силой тяжести и массой тела. Физика. 7 класс Портфолио учителя физики Бушмакиной Е. С.
Портфолио учителя физики Бушмакиной Е. С. Разработка урока по теме Изучение колебаний математического маятника
Разработка урока по теме Изучение колебаний математического маятника Устройство и принцип работы воздухораспределителя 483
Устройство и принцип работы воздухораспределителя 483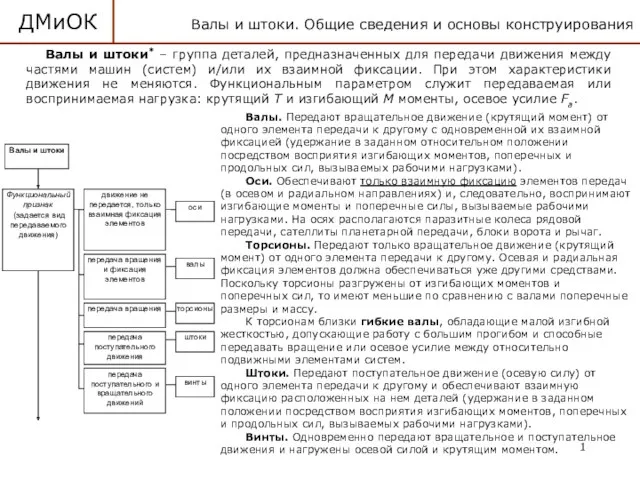 Детали машин и основы конструирования. Валы и штоки. (Лекция 11)
Детали машин и основы конструирования. Валы и штоки. (Лекция 11) Плотность вещества
Плотность вещества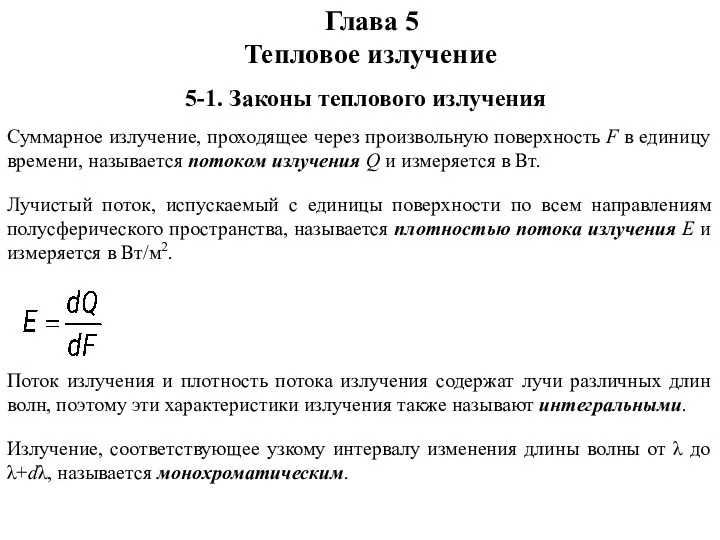 Тепловое излучение. Глава 5
Тепловое излучение. Глава 5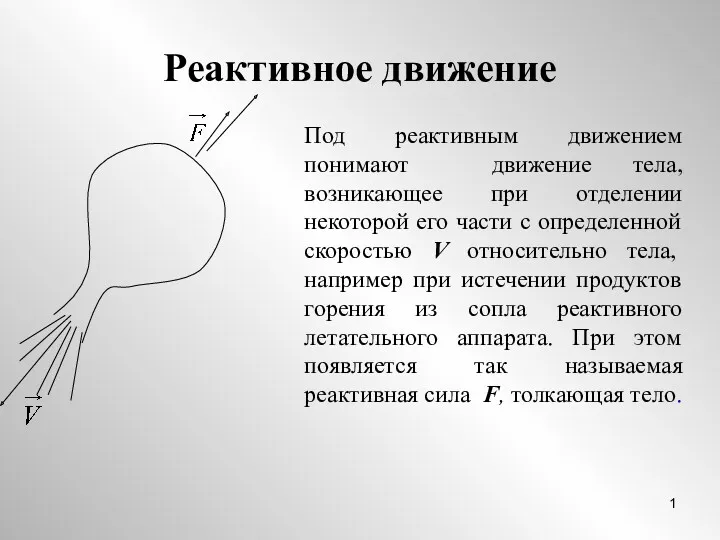 Реактивное движение
Реактивное движение Корабельные гироскопические системы. (Тема 2)
Корабельные гироскопические системы. (Тема 2) Температура
Температура Умови плавання тіл
Умови плавання тіл Углекислотные лазеры высокого и низкого давления
Углекислотные лазеры высокого и низкого давления Лекція №5. Закон збереження імпульсу
Лекція №5. Закон збереження імпульсу Взаємодія тіл. Імпульс. Закон збереження імпульсу
Взаємодія тіл. Імпульс. Закон збереження імпульсу Магнитное поле. Действие магнитного поля на движущийся электрический заряд
Магнитное поле. Действие магнитного поля на движущийся электрический заряд Современные приборы измерения температуры
Современные приборы измерения температуры Измерение активного сопротивления обмоток постоянному току
Измерение активного сопротивления обмоток постоянному току Законы отражения
Законы отражения Newton’s Laws of Motion
Newton’s Laws of Motion Технологический процесс проведения опрессовки форсунок судового двигателя
Технологический процесс проведения опрессовки форсунок судового двигателя Гамма-излучение
Гамма-излучение Спектрально-люминесцентные свойства кристаллов стабилизированного диоксида циркония, активированных ионами
Спектрально-люминесцентные свойства кристаллов стабилизированного диоксида циркония, активированных ионами Оптическое явление атмосферы гало
Оптическое явление атмосферы гало