- Замкнутые системы автоматического управления регулируемыми электроприводами

Содержание
- 2. Вопросы: 1. Способы автоматического регулирования координат и их основные показатели. 2. Типовые законы регулирования координат и
- 3. 3. Замкнутые схемы управления электроприводами с двигателями постоянного тока по скорости 4. Замкнутые электропривода с подчиненным
- 4. 1. Способы автоматического регулирования координат и их основные показатели. Электропривод предназначен для приведения в движение рабочих
- 5. Известны три способа автоматического регулирования координат: регулирование по отклонению координаты от заданного значения с помощью отрицательной
- 6. В электроприводе применяется в основном регулирование по отклонению, поскольку при этом можно обеспечить требуемую точность независимо
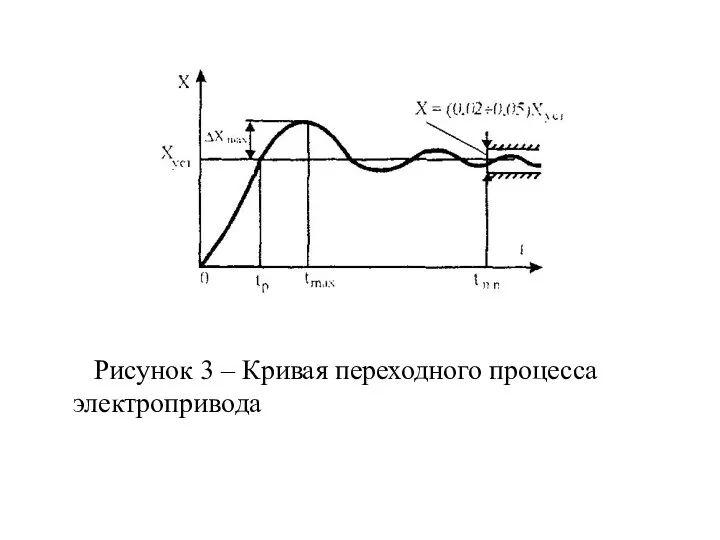
- 8. .
- 9. .
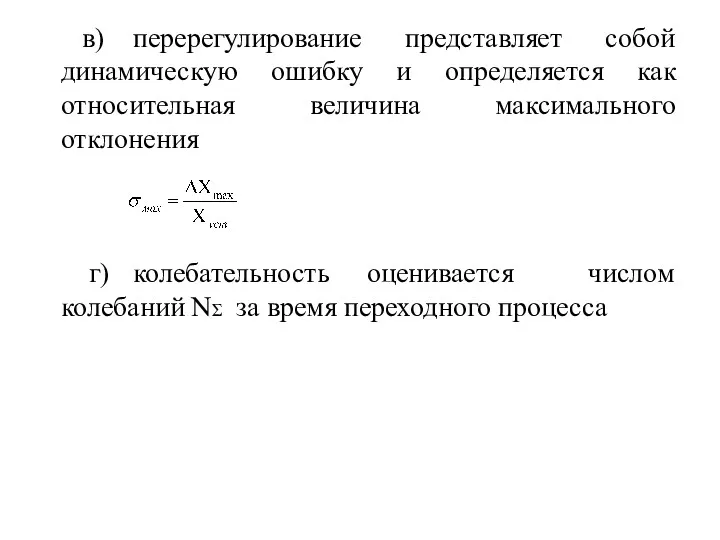
- 12. .
- 13. Экономичность регулирования оценивается технико-экономическими расчетами, учитывающими капитальные затраты на реализацию данного способа регулирования, эксплуатационные расходы при
- 15. По характеру изменения регулирующего воздействия автоматические регуляторы подразделяются на регуляторы с линейными и нелинейными законами регулирования.
- 16. В зависимости от задающего воздействия и параметров объекта регулирования подбирают регулятор с определенной характеристикой Wр. Изменение
- 18. Регуляторы называются пропорциональными (П-регуляторы) если они имеют один параметр настройки – коэффициент передачи kp. Переходные процессы
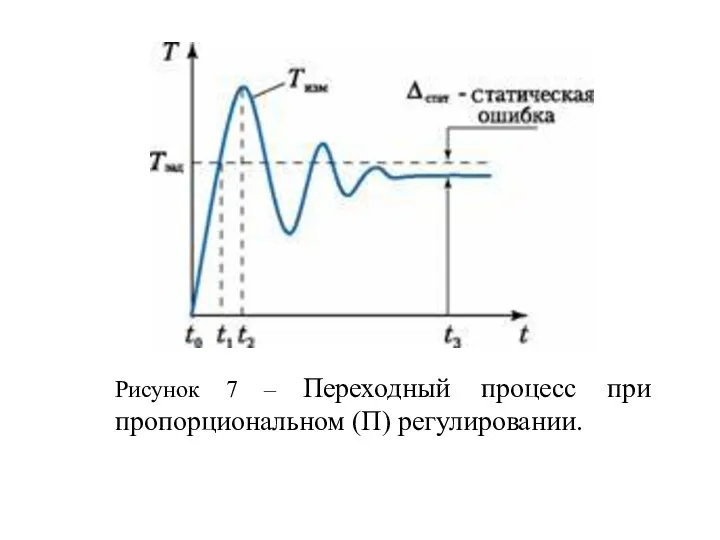
- 20. Из графика (рис.6) видно, что чем меньше пропорциональный диапазон, тем круче характеристика регулирования. Кривая (1) соответствует
- 22. Из рис.5 видно, что в цепочке регулирования в реальном регуляторе имеется еще одно инерционное (балластное) звено
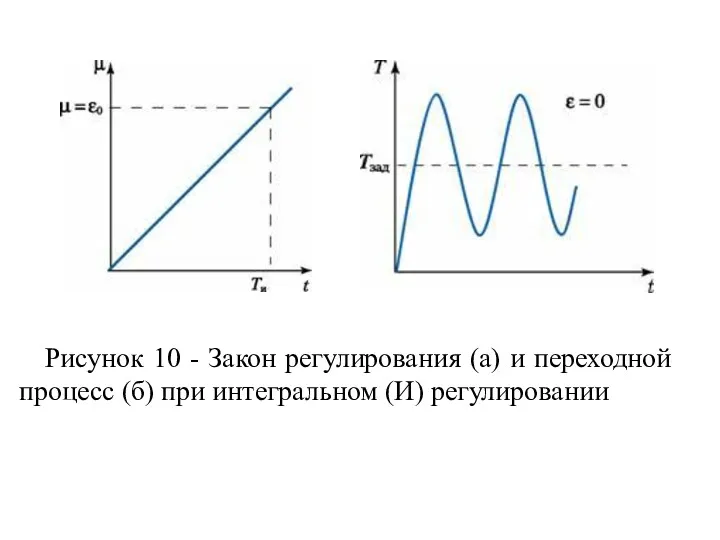
- 25. где kи=1/Ти – коэффициент пропорциональности интегральной составляющей, Ти - постоянная времени интегрирования, параметр настройки регулятора. Если
- 33. 3. Замкнутые схемы управления электроприводами с двигателями постоянного тока по скорости Характеристики разомкнутых ЭП, построенных по
- 36. 4. Замкнутые электропривода с подчиненным регулированием координат Эффективное и качественное регулирование координат в системе П —
- 37. Включение в цепи задающего сигнала скорости Uз.с регулятора скорости и его обратной связи (резисторов R1 и
- 39. Так, схема регулятора тока с включением в цепь обратной связи конденсатора Со.с последовательно с резистором Rо.с2
- 40. 5. Замкнутый электропривод с частотным управлением асинхронного двигателя ЭП обеспечивают регулирование скорости, тока и момента трехфазных
- 42. 6. Замкнутая схема импульсного регулирования скорости асинхронного двигателя с помощью резистора в цепи ротора В схеме
- 44. Скачать презентацию
Вопросы:
1. Способы автоматического регулирования координат и их основные показатели.
2.
Вопросы:
1. Способы автоматического регулирования координат и их основные показатели.
2.
3. Замкнутые схемы управления электроприводами с двигателями постоянного тока по
3. Замкнутые схемы управления электроприводами с двигателями постоянного тока по
1. Способы автоматического регулирования координат и их основные показатели.
Электропривод предназначен
1. Способы автоматического регулирования координат и их основные показатели.
Электропривод предназначен
Известны три способа автоматического регулирования координат:
регулирование по отклонению координаты
Известны три способа автоматического регулирования координат:
регулирование по отклонению координаты
В электроприводе применяется в основном регулирование по отклонению, поскольку при
В электроприводе применяется в основном регулирование по отклонению, поскольку при
.
.
.
.

.
.
Экономичность регулирования оценивается технико-экономическими расчетами, учитывающими капитальные затраты на реализацию
Экономичность регулирования оценивается технико-экономическими расчетами, учитывающими капитальные затраты на реализацию
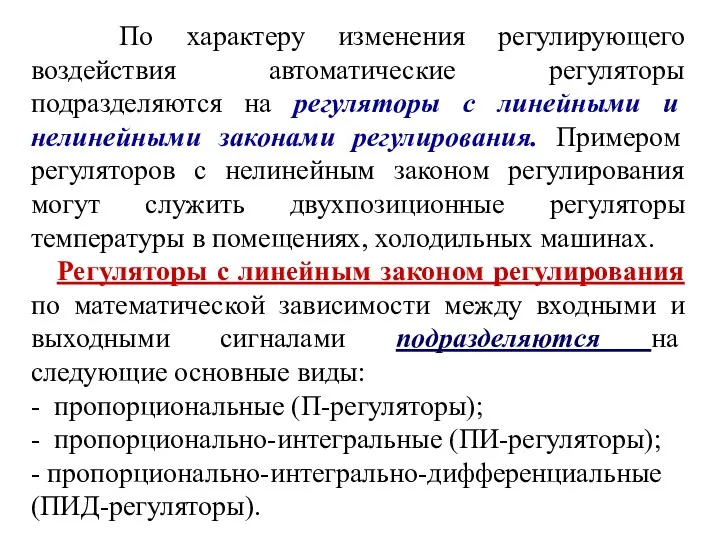
По характеру изменения регулирующего воздействия автоматические регуляторы подразделяются на регуляторы
По характеру изменения регулирующего воздействия автоматические регуляторы подразделяются на регуляторы
В зависимости от задающего воздействия и параметров объекта регулирования
В зависимости от задающего воздействия и параметров объекта регулирования

Регуляторы называются пропорциональными (П-регуляторы) если они имеют один параметр настройки –
Регуляторы называются пропорциональными (П-регуляторы) если они имеют один параметр настройки –
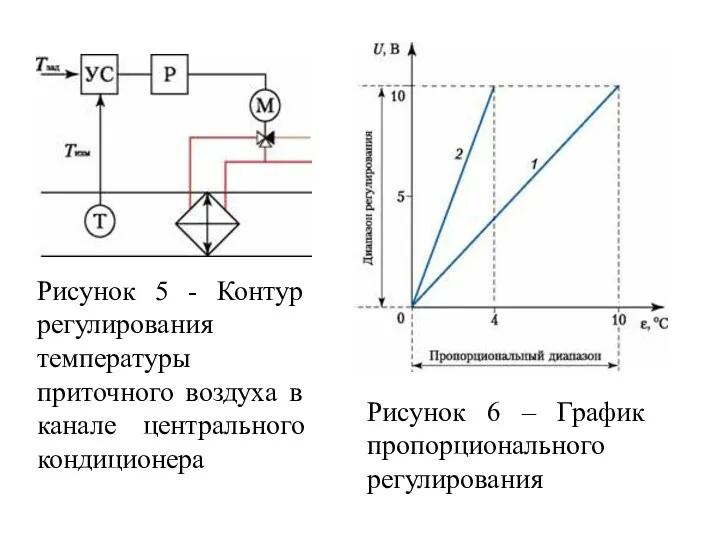
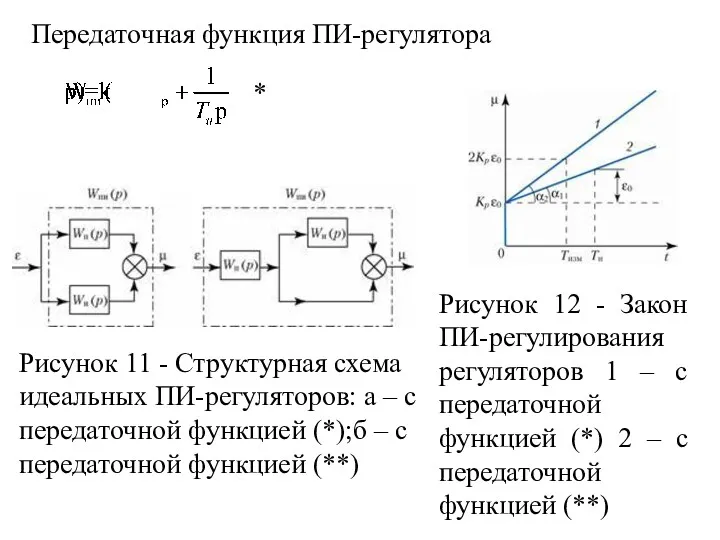
Из графика (рис.6) видно, что чем меньше пропорциональный диапазон, тем
Из графика (рис.6) видно, что чем меньше пропорциональный диапазон, тем
Из рис.5 видно, что в цепочке регулирования в реальном регуляторе
Из рис.5 видно, что в цепочке регулирования в реальном регуляторе


где kи=1/Ти – коэффициент пропорциональности интегральной составляющей,
Ти - постоянная времени
где kи=1/Ти – коэффициент пропорциональности интегральной составляющей,
Ти - постоянная времени

3. Замкнутые схемы управления электроприводами с двигателями постоянного тока по скорости
3. Замкнутые схемы управления электроприводами с двигателями постоянного тока по скорости

4. Замкнутые электропривода с подчиненным регулированием координат
Эффективное и качественное регулирование
4. Замкнутые электропривода с подчиненным регулированием координат
Эффективное и качественное регулирование
Включение в цепи задающего сигнала скорости Uз.с регулятора скорости и
Включение в цепи задающего сигнала скорости Uз.с регулятора скорости и
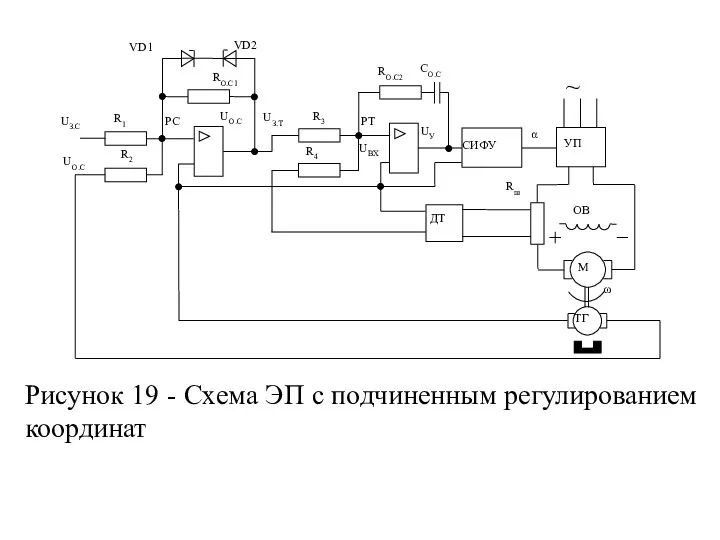
Так, схема регулятора тока с включением в цепь обратной связи конденсатора
Так, схема регулятора тока с включением в цепь обратной связи конденсатора
5. Замкнутый электропривод с частотным управлением асинхронного двигателя
ЭП обеспечивают
5. Замкнутый электропривод с частотным управлением асинхронного двигателя
ЭП обеспечивают

6. Замкнутая схема импульсного регулирования скорости асинхронного двигателя с помощью резистора
6. Замкнутая схема импульсного регулирования скорости асинхронного двигателя с помощью резистора
 Оптические свойства квантоворазмерных гетероструктур
Оптические свойства квантоворазмерных гетероструктур Фотоны. Давление света
Фотоны. Давление света Температура
Температура Сила тяжести. Невесомость
Сила тяжести. Невесомость Релятивистская механика. (Тема 6)
Релятивистская механика. (Тема 6) Уравнение неразрывности среды. Модель сплошной среды
Уравнение неразрывности среды. Модель сплошной среды Глаз и зрение. Оптические иллюзии. (8 класс)
Глаз и зрение. Оптические иллюзии. (8 класс) Гравитационное взаимодействие. Закон всемирного тяготения
Гравитационное взаимодействие. Закон всемирного тяготения Елементи спеціальної теорії відносності
Елементи спеціальної теорії відносності Сұйықтар мен газдардағы қысым. Паскаль заңы. 10 практикалық жұмыс
Сұйықтар мен газдардағы қысым. Паскаль заңы. 10 практикалық жұмыс Стан та перспективи розвитку ремонтно-обслуговуючої бази сільськогосподарської техніки
Стан та перспективи розвитку ремонтно-обслуговуючої бази сільськогосподарської техніки Равномерное прямолинейное движение. (10 класс)
Равномерное прямолинейное движение. (10 класс) Сила трения
Сила трения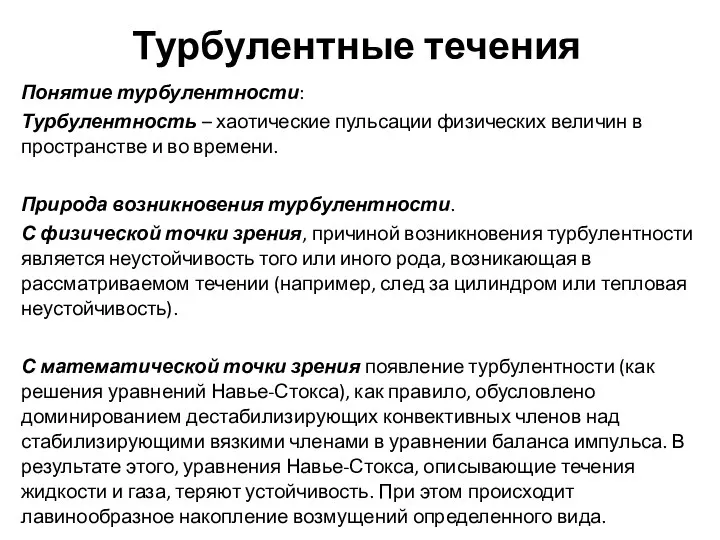 Турбулентные течения
Турбулентные течения Однофазная цепь с последовательным соединением электроприемников
Однофазная цепь с последовательным соединением электроприемников Процессы теплопереноса
Процессы теплопереноса Волновая теория света
Волновая теория света Источники света. Распространение света
Источники света. Распространение света Приборы электромагнитной и электродинамической систем
Приборы электромагнитной и электродинамической систем сценарий линейки на день космонавтики
сценарий линейки на день космонавтики Электромагнитные волны и их свойства. Шкала электромагнитных волн
Электромагнитные волны и их свойства. Шкала электромагнитных волн Сравнение вариантов монтажных кранов
Сравнение вариантов монтажных кранов Энергия. Закон сохранения энергии
Энергия. Закон сохранения энергии Атомная абсорбционная спектроскопия
Атомная абсорбционная спектроскопия Робота і потужність електричного струму
Робота і потужність електричного струму Теория возраста. энергия нейтрона до и после рассеяния
Теория возраста. энергия нейтрона до и после рассеяния презентация Генератор переменного тока
презентация Генератор переменного тока Телескоп, принцип работы и его назначение
Телескоп, принцип работы и его назначение