- Измерения углов и расстояний. Приборы и методы

Содержание
- 2. Теодолит Теодолит – прибор для измерения горизонтальных и вертикальных углов. Бывают разной конструкции: оптические, электронные и
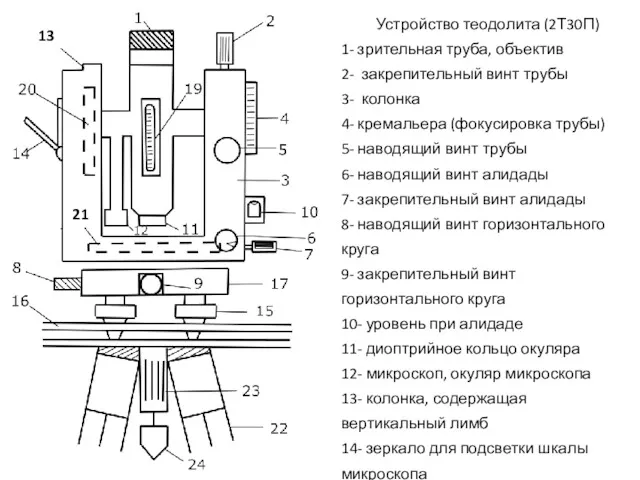
- 3. Устройство теодолита (2Т30П) 1- зрительная труба, объектив 2- закрепительный винт трубы 3- колонка 4- кремальера (фокусировка
- 4. 15- подъёмные винты 16- основание 17- подставка (треггер) 18- ошибка в рисунке, номер пропущен 19- уровень
- 5. Сетка нитей в поле зрения трубы Шкала микроскопа для снятия отсчётов по горизонтальному и вертикальному кругу
- 6. Поверки теодолита Перед началом полевых работ теодолит, как и любой другой геодезический инструмент, должен быть поверен.
- 7. Основные оси теодолита 2Т30П 1. Вертикальная ось вращения прибора I-I1 2. Ось вращения трубы H-H1 3.
- 8. Ось цилиндрического уровня (U-U1) должна быть перпендикулярна вертикальной оси вращения прибора (I-I1). Прибор горизонтируют по цилиндрическому
- 9. 2. Визирная ось трубы (V-V1) должна быть перпендикулярна оси вращения трубы (H-H1). Суть поверки сводится к
- 10. Коллимационная ошибка должна быть постоянной и не превышать 2´ для использования прибора для теодолитного хода. Чтобы
- 11. 3. Место нуля вертикального круга (МО) должно быть постоянным и не превышать определённого значения (1,5´ если
- 12. Измерение теодолитом горизонтальных углов Теодолит устанавливается над точкой (В) и приводится в рабочее положение: центрируется над
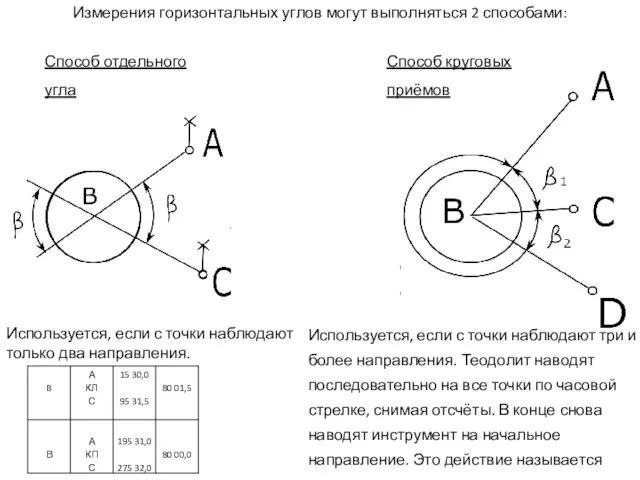
- 13. Измерения горизонтальных углов могут выполняться 2 способами: Способ отдельного угла Способ круговых приёмов Используется, если с
- 14. Измерение вертикальных углов Вертикальные углы измеряют для определения превышений методом тригонометрического нивелирования и для приведения наклонных
- 15. ИЗМЕРЕНИЕ РАССТОЯНИЙ
- 16. Мерные устройства В геодезии и топографии для измерения расстояний используют: проволоки, ленты, рулетки; оптические дальномеры; электронные
- 17. Мерные проволоки, ленты и рулетки являлись основным, а до середины прошлого века и единственным средством измерения
- 18. При измерении расстояний на местности при значительных углах наклона (в теодолитном ходе > 1,5⁰, при съёмке
- 19. Теорема синусов: a/Sin β1 = b/Sin β2 = c/Sin β3 b = a Sin β2 /Sin
- 20. 2. Оптические дальномеры – оптические устройства, вмонтированные в зрительную трубу геодезических приборов. Это оптическое стекло, на
- 21. 3. Электронные дальномеры бывают: радио-, свето- и лазерные. С их помощью расстояние до объекта определяется по
- 22. В начальной точке линии устанавливают дальномер, а в конечной точке – отражатель. Волны, посланные дальномером, отражаются
- 23. ГЕОДЕЗИЧЕСКИЕ ЗАСЕЧКИ Необходимость в засечках возникает в случае, если между точками возникает препятствие, не позволяющее измерить
- 24. В прямой угловой засечке даны три точки с известными координатами: X1, Y1, X2, Y2, X3, Y3.
- 25. Из решения обратной геодезической задачи на исходных пунктах 1 и 2 получают дирекционный угол α1-2. Затем,
- 26. Широкое распространение в геодезии получила обратная угловая засечка. В ней измерения углов делают только на определяемом
- 27. Разница между прямой линейной засечкой и обратной заключается только в полевых работах и не сказывается на
- 28. СПУТНИКОВЫЕ МЕТОДЫ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ВЫСОТ ТОЧЕК МЕСТНОСТИ
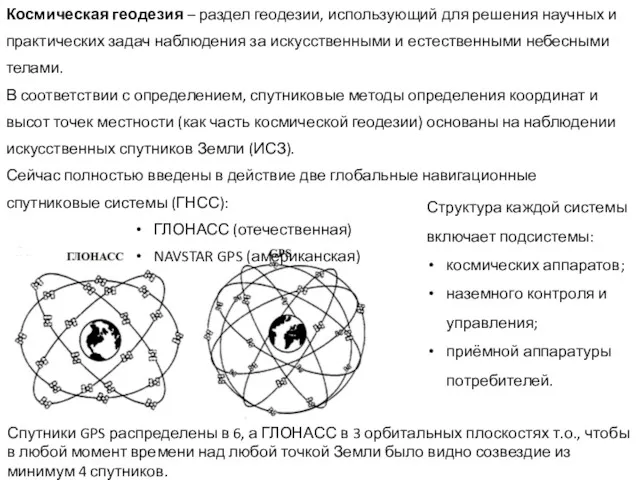
- 29. Космическая геодезия – раздел геодезии, использующий для решения научных и практических задач наблюдения за искусственными и
- 30. Определение координат спутникового приёмника основано на методе линейных засечек (прямая линейная засечка). Роль опорных пунктов выполняют
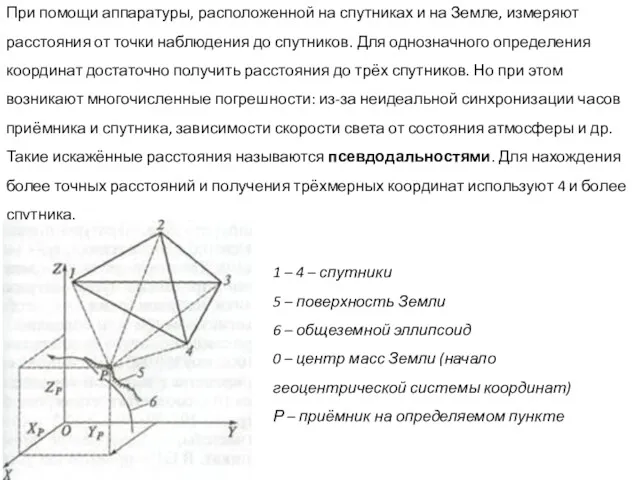
- 31. При помощи аппаратуры, расположенной на спутниках и на Земле, измеряют расстояния от точки наблюдения до спутников.
- 32. Для повышения точности определения координат применяют метод дифференциальной коррекции, при котором используют как минимум два комплекта
- 33. На территориях, где постоянно выполняются спутниковые определения, съемки на местности, вместо переносных полевых дифференциальных станций устанавливаются
- 35. Скачать презентацию

Теодолит
Теодолит – прибор для измерения горизонтальных и вертикальных углов.
Бывают разной конструкции:
Теодолит
Теодолит – прибор для измерения горизонтальных и вертикальных углов.
Бывают разной конструкции:
Устройство теодолита (2Т30П)
1- зрительная труба, объектив
2- закрепительный винт трубы
3- колонка
4- кремальера
Устройство теодолита (2Т30П)
1- зрительная труба, объектив
2- закрепительный винт трубы
3- колонка
4- кремальера
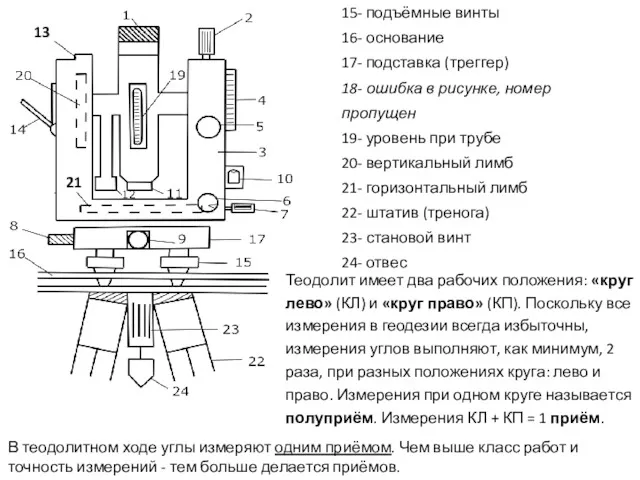
15- подъёмные винты
16- основание
17- подставка (треггер)
18- ошибка в рисунке, номер пропущен
19-
15- подъёмные винты
16- основание
17- подставка (треггер)
18- ошибка в рисунке, номер пропущен
19-
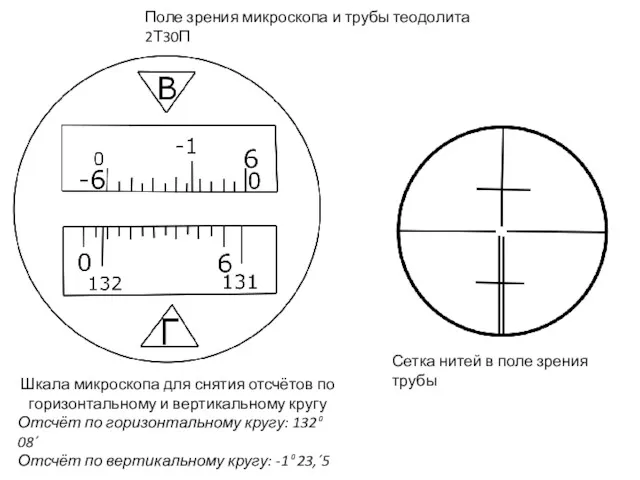
Сетка нитей в поле зрения трубы
Шкала микроскопа для снятия отсчётов по
Сетка нитей в поле зрения трубы
Шкала микроскопа для снятия отсчётов по
Поверки теодолита
Перед началом полевых работ теодолит, как и любой другой геодезический
Поверки теодолита
Перед началом полевых работ теодолит, как и любой другой геодезический
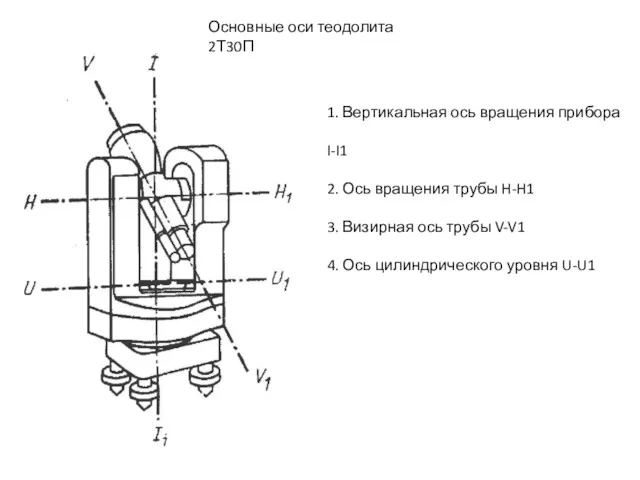
Основные оси теодолита 2Т30П
1. Вертикальная ось вращения прибора I-I1
2. Ось вращения
Основные оси теодолита 2Т30П
1. Вертикальная ось вращения прибора I-I1
2. Ось вращения
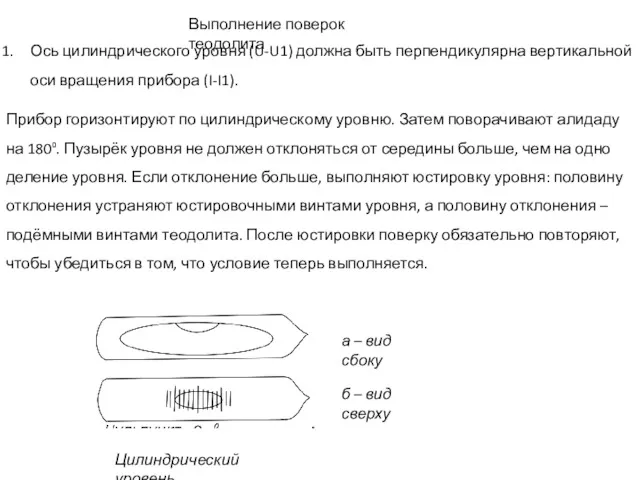
Ось цилиндрического уровня (U-U1) должна быть перпендикулярна вертикальной оси вращения прибора
Ось цилиндрического уровня (U-U1) должна быть перпендикулярна вертикальной оси вращения прибора
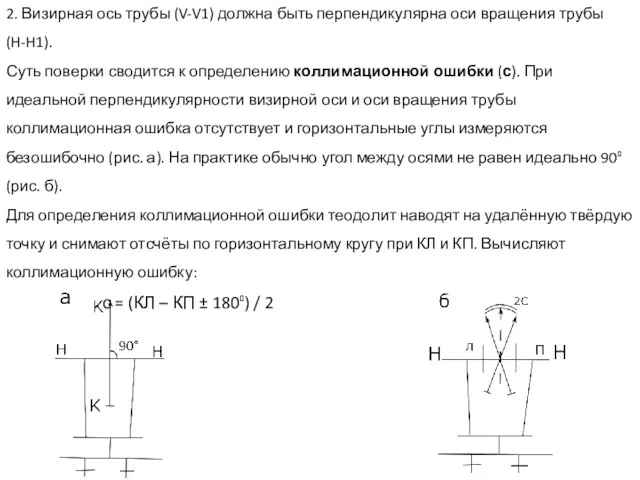
2. Визирная ось трубы (V-V1) должна быть перпендикулярна оси вращения трубы
2. Визирная ось трубы (V-V1) должна быть перпендикулярна оси вращения трубы
Коллимационная ошибка должна быть постоянной и не превышать 2´ для использования
Коллимационная ошибка должна быть постоянной и не превышать 2´ для использования
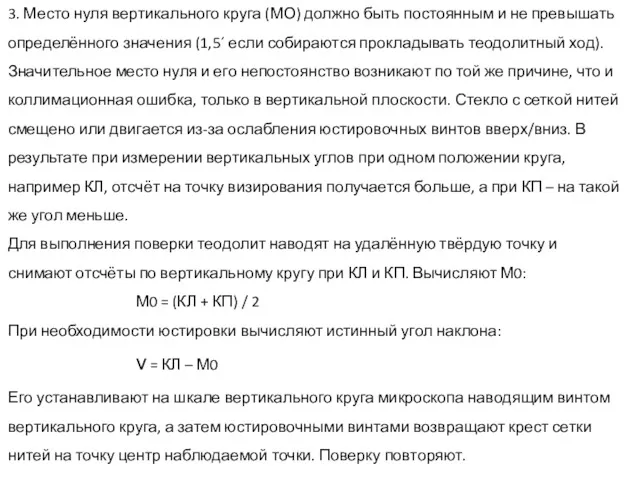
3. Место нуля вертикального круга (МО) должно быть постоянным и не
3. Место нуля вертикального круга (МО) должно быть постоянным и не
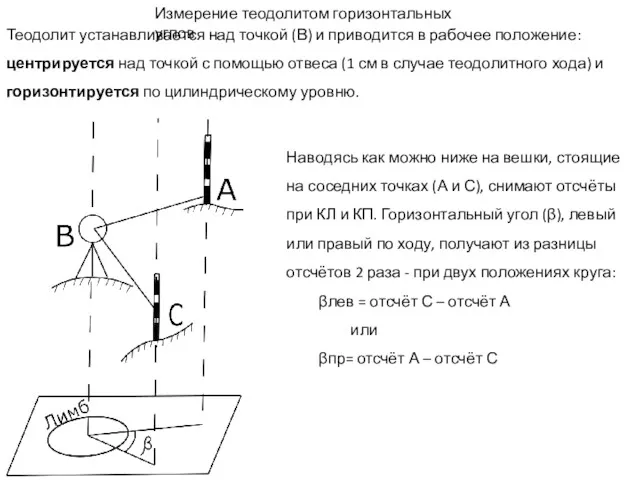
Измерение теодолитом горизонтальных углов
Теодолит устанавливается над точкой (В) и приводится в
Измерение теодолитом горизонтальных углов
Теодолит устанавливается над точкой (В) и приводится в
Измерения горизонтальных углов могут выполняться 2 способами:
Способ отдельного угла
Способ круговых приёмов
Используется,
Измерения горизонтальных углов могут выполняться 2 способами:
Способ отдельного угла
Способ круговых приёмов
Используется,
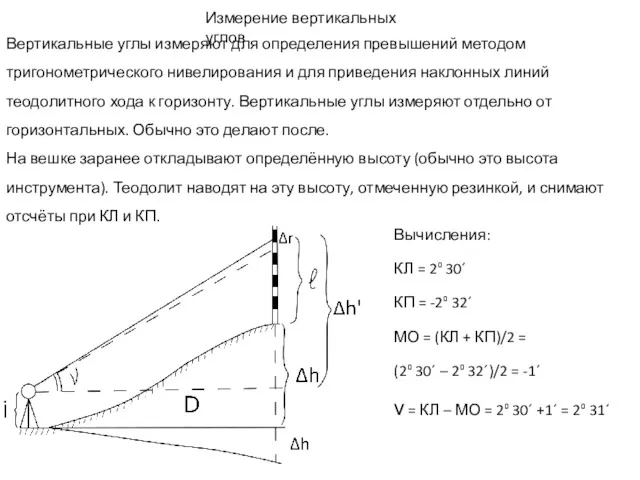
Измерение вертикальных углов
Вертикальные углы измеряют для определения превышений методом тригонометрического нивелирования
Измерение вертикальных углов
Вертикальные углы измеряют для определения превышений методом тригонометрического нивелирования
ИЗМЕРЕНИЕ РАССТОЯНИЙ
ИЗМЕРЕНИЕ РАССТОЯНИЙ

Мерные устройства
В геодезии и топографии для измерения расстояний используют:
проволоки, ленты, рулетки;
оптические
Мерные устройства
В геодезии и топографии для измерения расстояний используют:
проволоки, ленты, рулетки;
оптические
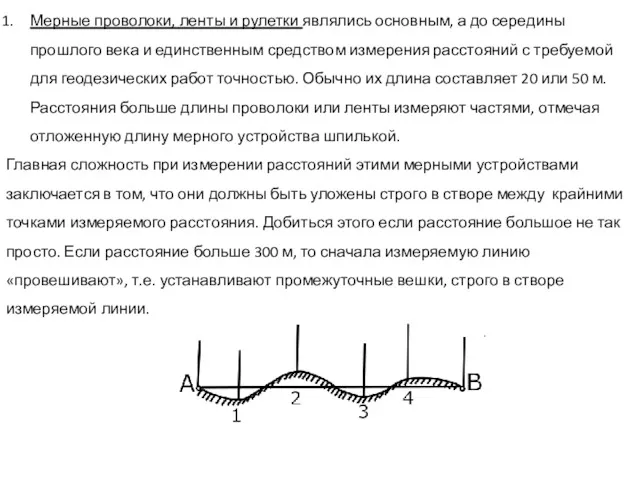
Мерные проволоки, ленты и рулетки являлись основным, а до середины прошлого
Мерные проволоки, ленты и рулетки являлись основным, а до середины прошлого
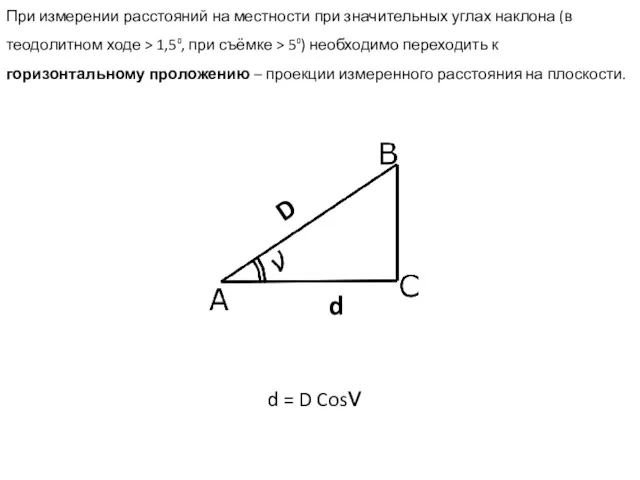
При измерении расстояний на местности при значительных углах наклона (в теодолитном
При измерении расстояний на местности при значительных углах наклона (в теодолитном
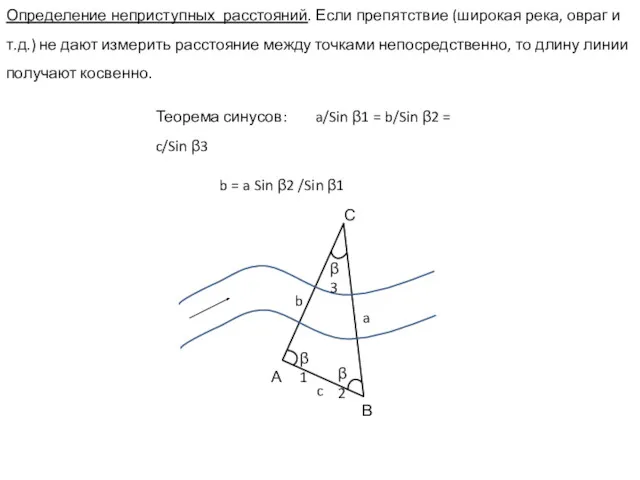
Теорема синусов: a/Sin β1 = b/Sin β2 = c/Sin β3
b =
Теорема синусов: a/Sin β1 = b/Sin β2 = c/Sin β3
b =
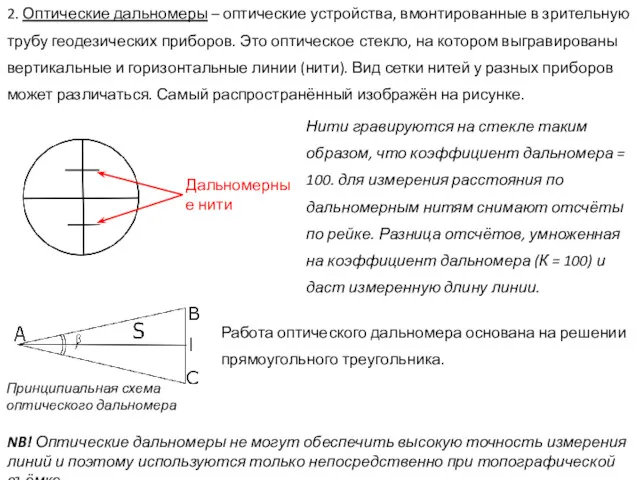
2. Оптические дальномеры – оптические устройства, вмонтированные в зрительную трубу геодезических
2. Оптические дальномеры – оптические устройства, вмонтированные в зрительную трубу геодезических

3. Электронные дальномеры бывают: радио-, свето- и лазерные. С их помощью
3. Электронные дальномеры бывают: радио-, свето- и лазерные. С их помощью
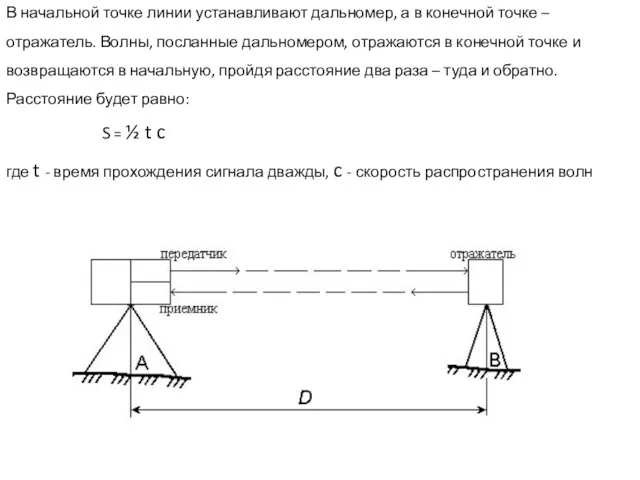
В начальной точке линии устанавливают дальномер, а в конечной точке –
В начальной точке линии устанавливают дальномер, а в конечной точке –
ГЕОДЕЗИЧЕСКИЕ ЗАСЕЧКИ
Необходимость в засечках возникает в случае, если между точками возникает
ГЕОДЕЗИЧЕСКИЕ ЗАСЕЧКИ
Необходимость в засечках возникает в случае, если между точками возникает
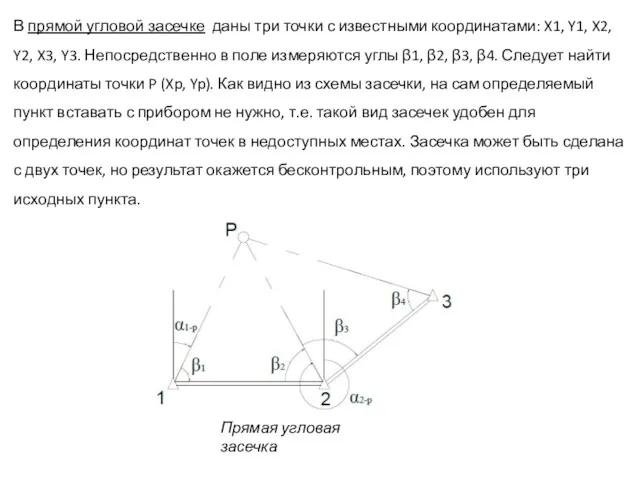
В прямой угловой засечке даны три точки с известными координатами: X1,
В прямой угловой засечке даны три точки с известными координатами: X1,
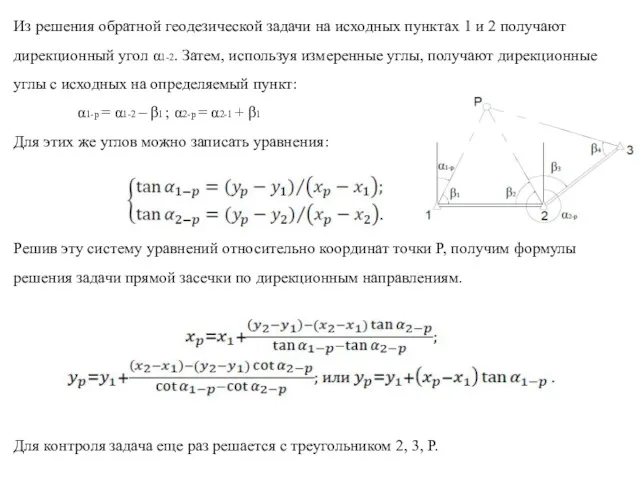
Из решения обратной геодезической задачи на исходных пунктах 1 и 2
Из решения обратной геодезической задачи на исходных пунктах 1 и 2
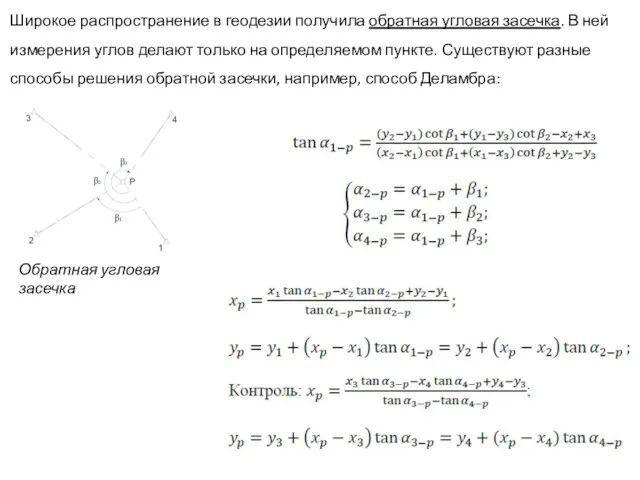
Широкое распространение в геодезии получила обратная угловая засечка. В ней измерения
Широкое распространение в геодезии получила обратная угловая засечка. В ней измерения
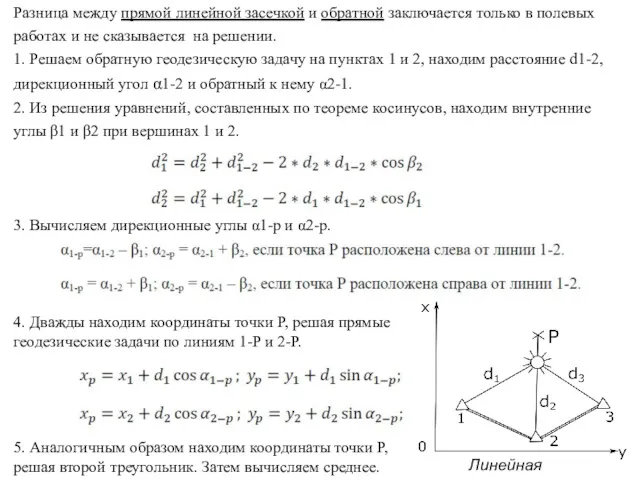
Разница между прямой линейной засечкой и обратной заключается только в полевых
Разница между прямой линейной засечкой и обратной заключается только в полевых
СПУТНИКОВЫЕ МЕТОДЫ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ВЫСОТ ТОЧЕК МЕСТНОСТИ
СПУТНИКОВЫЕ МЕТОДЫ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ВЫСОТ ТОЧЕК МЕСТНОСТИ
Космическая геодезия – раздел геодезии, использующий для решения научных и практических
Космическая геодезия – раздел геодезии, использующий для решения научных и практических
Определение координат спутникового приёмника основано на методе линейных засечек (прямая линейная
Определение координат спутникового приёмника основано на методе линейных засечек (прямая линейная
При помощи аппаратуры, расположенной на спутниках и на Земле, измеряют расстояния
При помощи аппаратуры, расположенной на спутниках и на Земле, измеряют расстояния
Для повышения точности определения координат применяют метод дифференциальной коррекции, при котором
Для повышения точности определения координат применяют метод дифференциальной коррекции, при котором
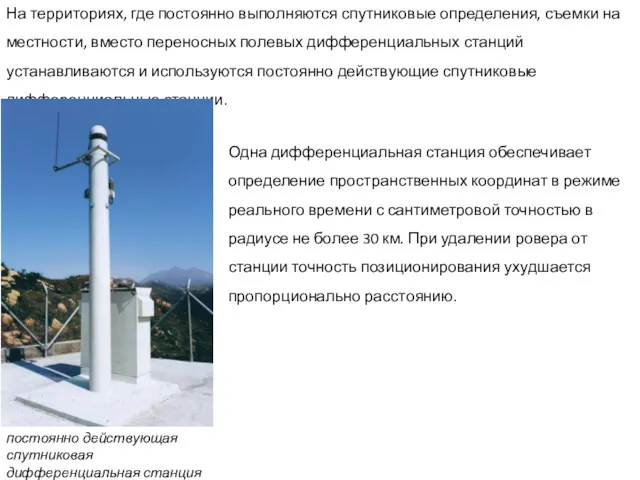
На территориях, где постоянно выполняются спутниковые определения, съемки на местности, вместо
На территориях, где постоянно выполняются спутниковые определения, съемки на местности, вместо
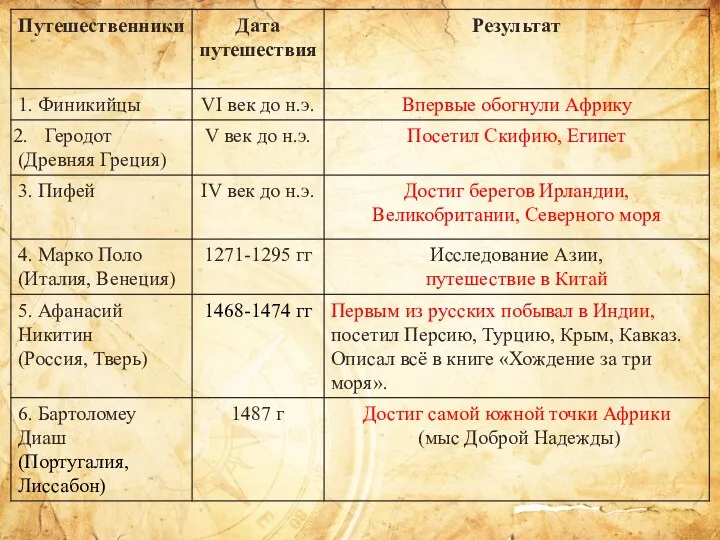 Знаменитые путешественники. Великие географические открытия
Знаменитые путешественники. Великие географические открытия Введение в метеорологию
Введение в метеорологию Geographical position of the USA
Geographical position of the USA Геохронологическая таблица
Геохронологическая таблица Склоны и склоновые процессы
Склоны и склоновые процессы Зона степей
Зона степей Географический КВН
Географический КВН Литосфера и строение Земли. Формирование литосферных плит земли
Литосфера и строение Земли. Формирование литосферных плит земли India. China
India. China Город Санкт - Петербург
Город Санкт - Петербург Путешествие в Республику Карелия
Путешествие в Республику Карелия Границы Российской Федерации. Страны – соседи России. Моря омывающие территорию России
Границы Российской Федерации. Страны – соседи России. Моря омывающие территорию России Геофизические опасные явления
Геофизические опасные явления Географическое положение Республики Татарстан
Географическое положение Республики Татарстан Вулканы. Гейзера и горячие источники
Вулканы. Гейзера и горячие источники Население мира (10 класс)
Население мира (10 класс) Структуры и текстуры магматических горных пород
Структуры и текстуры магматических горных пород Тунис от Coral Travel
Тунис от Coral Travel Польща
Польща Испания
Испания Атмосфера. Игра
Атмосфера. Игра Население Африки
Население Африки Туризм в Марокко
Туризм в Марокко Системы координат. Балтийская система высот. Картографические проекции. Влияние кривизны земли на геодезические измерения
Системы координат. Балтийская система высот. Картографические проекции. Влияние кривизны земли на геодезические измерения Символика Кемеровской области, население
Символика Кемеровской области, население Хозяйственная деятельность людей. Города и сельские поселения. Культурно-исторические регионы мира
Хозяйственная деятельность людей. Города и сельские поселения. Культурно-исторические регионы мира Минеральные ресурсы России
Минеральные ресурсы России Зарубежная Азия
Зарубежная Азия