- هوش مصنوعي

Содержание
- 2. هوش مصنوعي Artificial Intelligence فهرست عاملهای حل مسئله اندازه گيری کارايي حل مسئله جستجوی ناآگاهانه اجتناب
- 3. عاملهای حل مسئله یک نوع از عاملهای هدف گرا است. عاملهای حل مسئله با یافتن دنباله
- 4. چهار گام اساسی برای حل مسائل فرموله کردن هدف: وضعيتهای مطلوب نهايي کدامند؟ فرموله کردن مسئله:
- 5. Function SIMPLE-PROBLEM-SOLVING-AGENT(percept)returns an action Inputs:percept,a percept Static:seq,an action sequence,initially empty state,some descripetion of the current world
- 6. مفروضات شبه کد عاملهای ساده حل مسئله در طراحی عامل ارائه شده، فرموله کردن و حل
- 7. حل مسئله با جستجو(مسیریابی در نقشه رومانی)
- 8. صورت مسأله: رفتن از آراد به بخارست فرموله کردن هدف: رسيدن به بخارست فرموله کردن مسئله:
- 9. مسئله و راه حل های خوش تعریف 1. حالت اوليه: حالتی که عامل از آن شروع
- 10. 3. آزمون هدف: تعيين ميکند که آيا حالت خاصی، حالت هدف است يا خير هدف صريح:
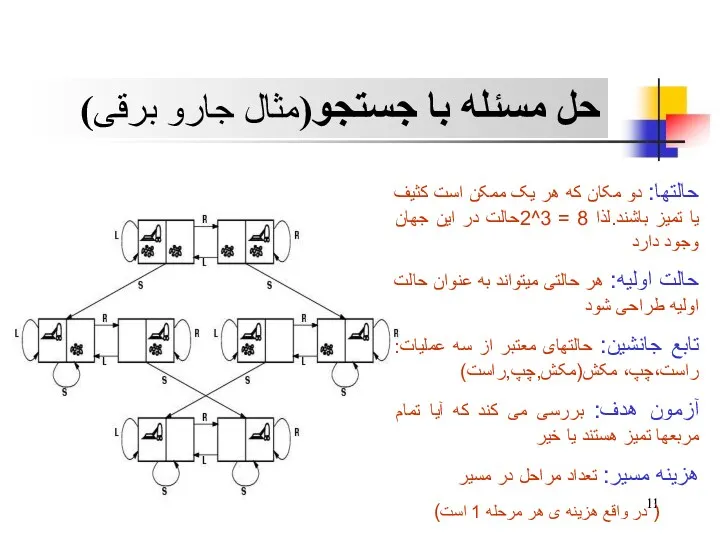
- 11. حل مسئله با جستجو(مثال جارو برقی) حالتها: دو مکان که هر يک ممکن است کثيف يا
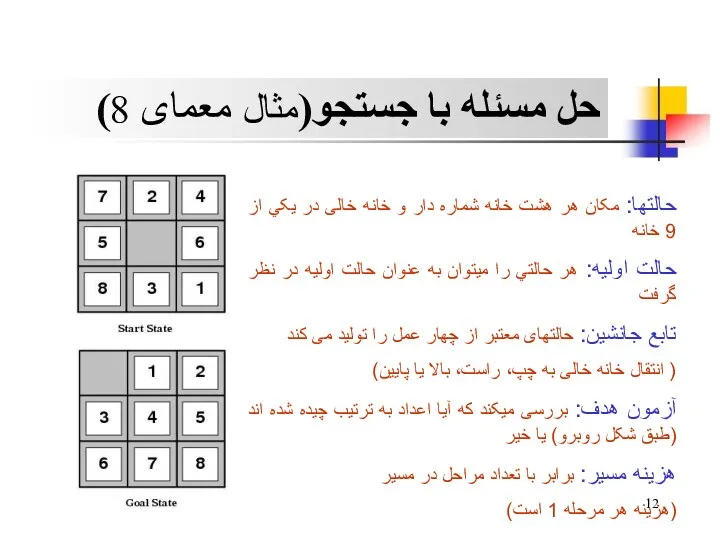
- 12. حل مسئله با جستجو(مثال معمای 8) حالتها: مکان هر هشت خانه شماره دار و خانه خالی
- 13. حل مسئله با جستجو(مثال معمای 8-ادامه) معمای 8 به خانوادهی معماهای جابجایی بلوک تعلق دارد که
- 14. حل مسئله با جستجو(مثال 8 وزیر) فرمول بندی افزايشي حالتها: هر ترتيبي از 0 تا 8
- 15. فرمول بندی حالت کامل حالتها: چيدمان n وزير (0≤ n≤ 8) ، بطوريکه در هر ستون
- 16. اندازه گیری کارآیی حل مسئله کامل بودن: آيا الگوريتم تضمين ميکند که در صورت وجود راه
- 17. جستجوی ناآگاهانه(کورکورانه) ناآگاهی اين است که الگوريتم هيچ اطلاعاتی غير از تعريف مسئله در اختيار ندارد
- 18. جستجوی عرضی
- 19. جستجوی عرضی(ادامه) کامل بودن: بله بهينگی: بله (مشروط) جستجوی عرضی ابتدا کم عمق ترین وضعیت هدف
- 20. زمان و فضای لازم برای جستجوی عرضی اعدادی که نشان داده شده اند با فاکتور تعداد
- 21. جستجوی با هزینه یکنواخت جستجو با هزینه ی یکنواخت ، استراتژی جستجوی عرضی را توسط بسط
- 22. جستجوی با هزینه یکنواخت(ادامه1) این استراتژی بجای عمق از هزینه ی های مسیر پیروی می کند
- 23. جستجوی با هزینه یکنواخت(ادامه2) اين جستجو گره L را با کمترين هزينه مسير بسط ميدهد
- 24. جستجوی عمقی جستجوی عمقی همیشه عمیق ترین گره را در حاشیه ی فعلی درخت جستجو بسط
- 25. جستجوی عمقی(ادامه1) 2 3 4 5 6 7
- 26. جستجوی عمقی(ادامه2) کامل بودن: خير اگر زير درخت چپ عمق نامحدود داشت و فاقد هر گونه
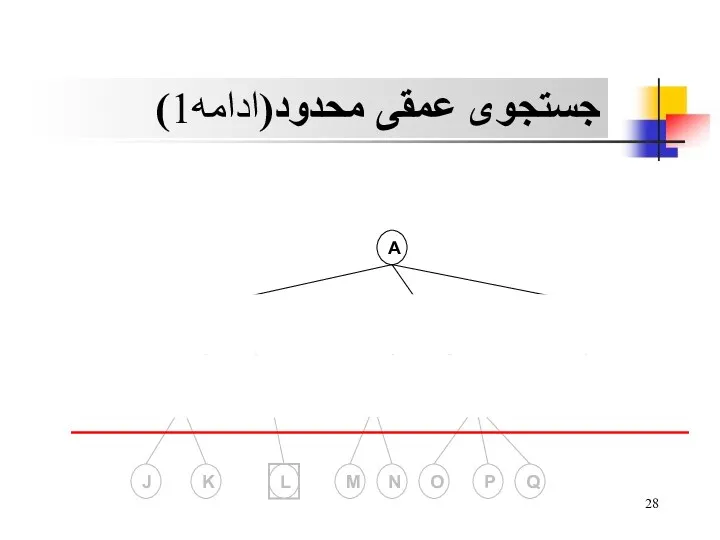
- 27. جستجوی عمقی محدود این استراتژی شبیه استراتژی جستجوی عمقی است با این تفاوت که فرض می
- 28. جستجوی عمقی محدود(ادامه1)
- 29. جستجوی عمقی محدود(ادامه2) کامل بودن: خير اگر L بهينگی: خير اين راهبرد بهينه نخواهد بود. پيچيدگي
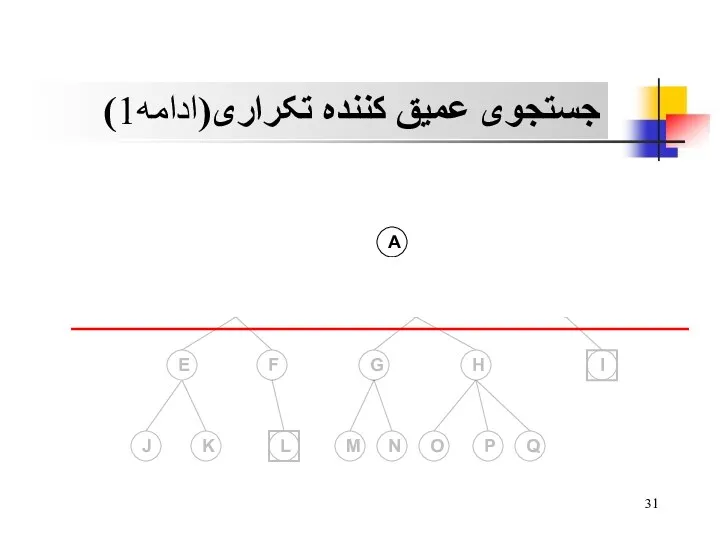
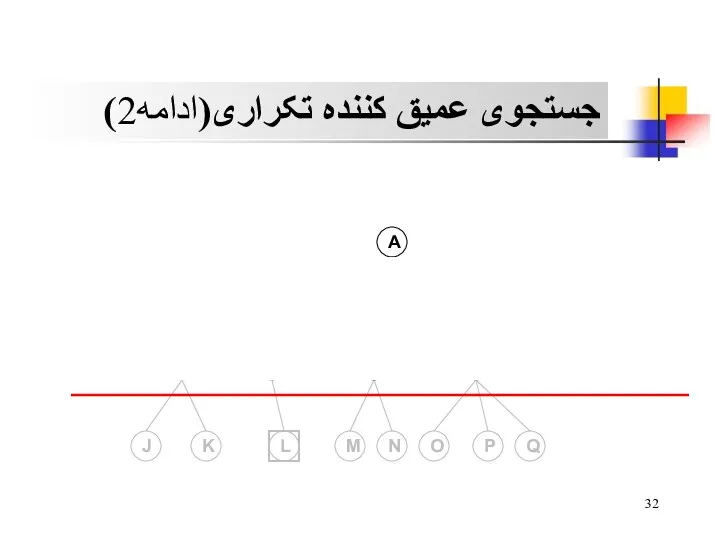
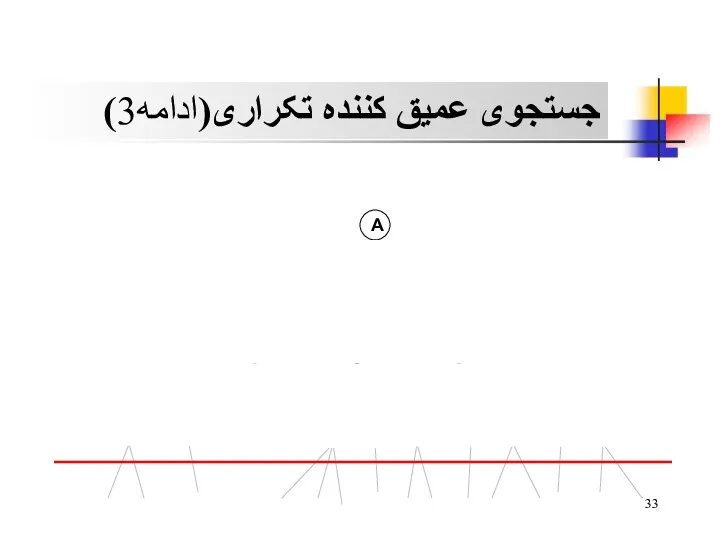
- 30. جستجوی عمیق کننده تکراری این استراتژی شبیه به جستجوی عمقی محدود عمل می کند با این
- 31. جستجوی عمیق کننده تکراری(ادامه1)
- 32. جستجوی عمیق کننده تکراری(ادامه2)
- 33. A B C D E F G H I J K L N M O P
- 34. کامل بودن: بله در صورتی که فاکتور انشعاب محدود باشد بهينگی: بله وقتی که هزينه مسير،
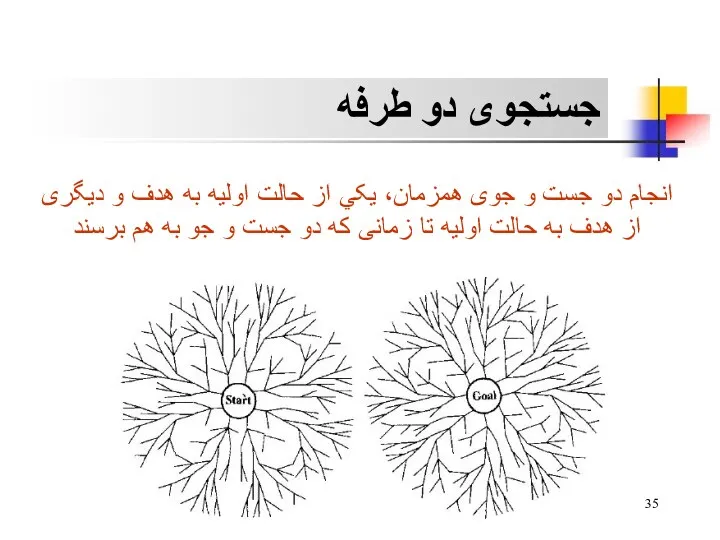
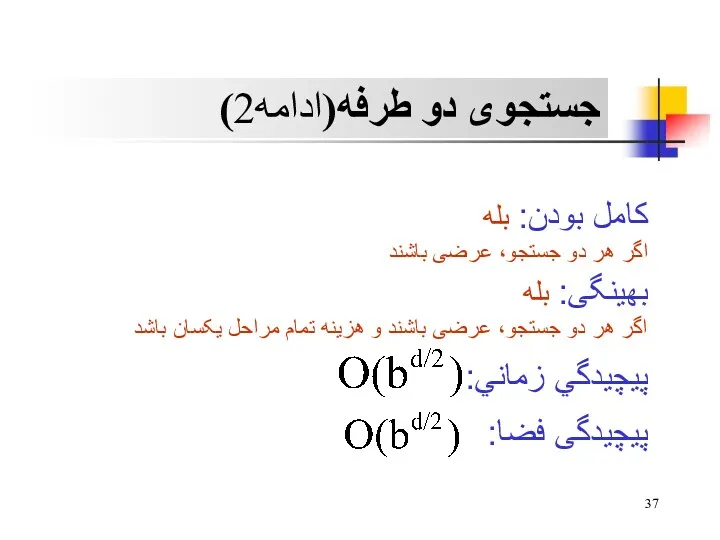
- 35. جستجوی دو طرفه انجام دو جست و جوی همزمان، يکي از حالت اوليه به هدف و
- 36. جستجو از سمت هدف به چه معناست؟ تعریف)- ما قبل های گره n ، گره هایی
- 37. کامل بودن: بله اگر هر دو جستجو، عرضی باشند بهينگی: بله اگر هر دو جستجو، عرضی
- 38. ارزیابی راهبردهای جستجو BFS DFS DLS IDFS BID
- 39. اجتناب از حالتهای تکراری وجود حالتهای تکراری در یک مسئله قابل حل ، می تواند آنرا
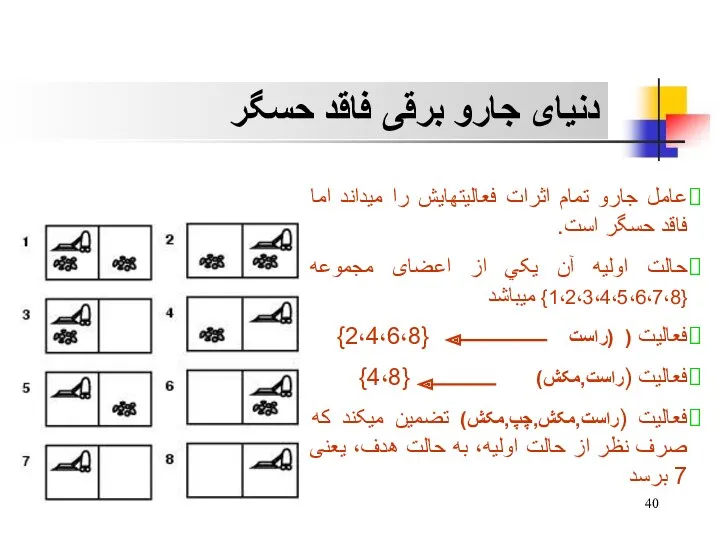
- 40. دنیای جارو برقی فاقد حسگر عامل جارو تمام اثرات فعاليتهايش را ميداند اما فاقد حسگر است.
- 42. Скачать презентацию
هوش مصنوعي Artificial Intelligence
فهرست
عاملهای حل مسئله
اندازه گيری کارايي حل مسئله
جستجوی ناآگاهانه
اجتناب
هوش مصنوعي Artificial Intelligence
فهرست
عاملهای حل مسئله
اندازه گيری کارايي حل مسئله
جستجوی ناآگاهانه
اجتناب
عاملهای حل مسئله یک نوع از عاملهای هدف گرا است.
عاملهای حل
عاملهای حل مسئله یک نوع از عاملهای هدف گرا است.
عاملهای حل
چهار گام اساسی برای حل مسائل
فرموله کردن هدف: وضعيتهای مطلوب نهايي
چهار گام اساسی برای حل مسائل
فرموله کردن هدف: وضعيتهای مطلوب نهايي
Function SIMPLE-PROBLEM-SOLVING-AGENT(percept)returns an action
Inputs:percept,a percept
Static:seq,an action sequence,initially empty
state,some descripetion
Function SIMPLE-PROBLEM-SOLVING-AGENT(percept)returns an action
Inputs:percept,a percept
Static:seq,an action sequence,initially empty
state,some descripetion
مفروضات شبه کد عاملهای ساده حل مسئله
در طراحی عامل ارائه شده،
مفروضات شبه کد عاملهای ساده حل مسئله
در طراحی عامل ارائه شده،
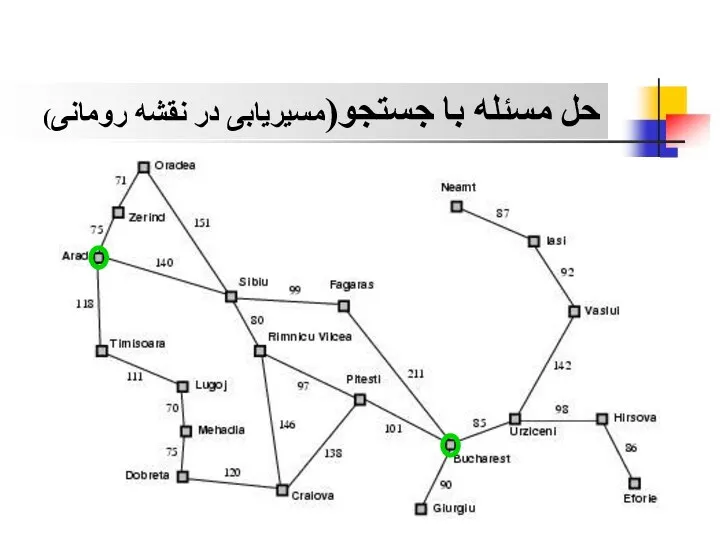
حل مسئله با جستجو(مسیریابی در نقشه رومانی)
حل مسئله با جستجو(مسیریابی در نقشه رومانی)
صورت مسأله: رفتن از آراد به بخارست
فرموله کردن هدف: رسيدن به
صورت مسأله: رفتن از آراد به بخارست
فرموله کردن هدف: رسيدن به
مسئله و راه حل های خوش تعریف
1. حالت اوليه: حالتی که
مسئله و راه حل های خوش تعریف
1. حالت اوليه: حالتی که
3. آزمون هدف: تعيين ميکند که آيا حالت خاصی، حالت هدف
حل مسئله با جستجو(مثال جارو برقی)
حالتها: دو مکان که هر يک
حل مسئله با جستجو(مثال جارو برقی)
حالتها: دو مکان که هر يک
حل مسئله با جستجو(مثال معمای 8)
حالتها: مکان هر هشت خانه شماره
حل مسئله با جستجو(مثال معمای 8)
حالتها: مکان هر هشت خانه شماره
حل مسئله با جستجو(مثال معمای 8-ادامه)
معمای 8 به خانوادهی معماهای
حل مسئله با جستجو(مثال معمای 8-ادامه)
معمای 8 به خانوادهی معماهای

حل مسئله با جستجو(مثال 8 وزیر)
فرمول بندی افزايشي
حالتها: هر ترتيبي از
حل مسئله با جستجو(مثال 8 وزیر)
فرمول بندی افزايشي
حالتها: هر ترتيبي از
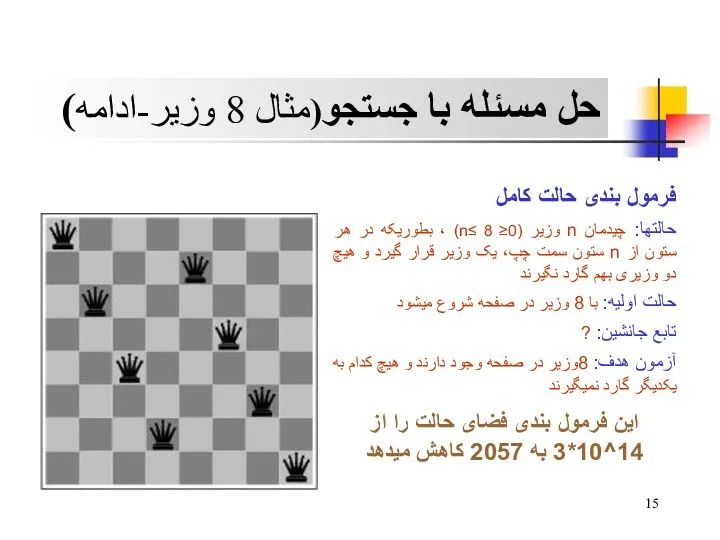
فرمول بندی حالت کامل
حالتها: چيدمان n وزير (0≤ n≤ 8) ،
فرمول بندی حالت کامل
حالتها: چيدمان n وزير (0≤ n≤ 8) ،
اندازه گیری کارآیی حل مسئله
کامل بودن: آيا الگوريتم تضمين ميکند که
اندازه گیری کارآیی حل مسئله
کامل بودن: آيا الگوريتم تضمين ميکند که
جستجوی ناآگاهانه(کورکورانه)
ناآگاهی اين است که الگوريتم هيچ اطلاعاتی غير از تعريف
جستجوی ناآگاهانه(کورکورانه)
ناآگاهی اين است که الگوريتم هيچ اطلاعاتی غير از تعريف
جستجوی عرضی
جستجوی عرضی
جستجوی عرضی(ادامه)
کامل بودن: بله
بهينگی: بله (مشروط)
جستجوی عرضی ابتدا کم عمق
جستجوی عرضی(ادامه)
کامل بودن: بله
بهينگی: بله (مشروط)
جستجوی عرضی ابتدا کم عمق

زمان و فضای لازم برای جستجوی عرضی
اعدادی که نشان داده
زمان و فضای لازم برای جستجوی عرضی
اعدادی که نشان داده
جستجوی با هزینه یکنواخت
جستجو با هزینه ی یکنواخت ، استراتژی
جستجوی با هزینه یکنواخت
جستجو با هزینه ی یکنواخت ، استراتژی
جستجوی با هزینه یکنواخت(ادامه1)
این استراتژی بجای عمق از هزینه ی های
جستجوی با هزینه یکنواخت(ادامه1)
این استراتژی بجای عمق از هزینه ی های
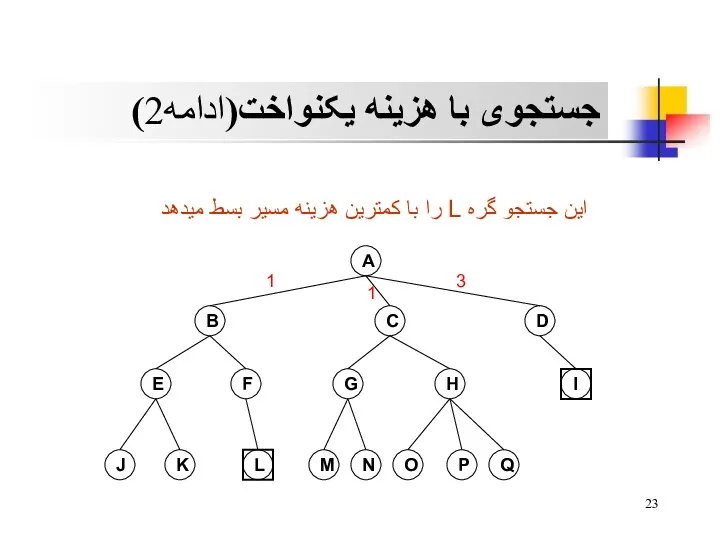
جستجوی با هزینه یکنواخت(ادامه2)
اين جستجو گره L را با کمترين هزينه
جستجوی با هزینه یکنواخت(ادامه2)
اين جستجو گره L را با کمترين هزينه
جستجوی عمقی
جستجوی عمقی همیشه عمیق ترین گره را در حاشیه
جستجوی عمقی
جستجوی عمقی همیشه عمیق ترین گره را در حاشیه
جستجوی عمقی(ادامه1)
2
3
4
5
6
7
جستجوی عمقی(ادامه1)
2
3
4
5
6
7
جستجوی عمقی(ادامه2)
کامل بودن: خير
اگر زير درخت چپ عمق نامحدود داشت و
جستجوی عمقی(ادامه2)
کامل بودن: خير
اگر زير درخت چپ عمق نامحدود داشت و
جستجوی عمقی محدود
این استراتژی شبیه استراتژی جستجوی عمقی است با
جستجوی عمقی محدود
این استراتژی شبیه استراتژی جستجوی عمقی است با
جستجوی عمقی محدود(ادامه1)
جستجوی عمقی محدود(ادامه1)
جستجوی عمقی محدود(ادامه2)
کامل بودن: خير
اگر L
جستجوی عمقی محدود(ادامه2)
کامل بودن: خير
اگر L

جستجوی عمیق کننده تکراری
این استراتژی شبیه به جستجوی عمقی محدود
جستجوی عمیق کننده تکراری
این استراتژی شبیه به جستجوی عمقی محدود
جستجوی عمیق کننده تکراری(ادامه1)
جستجوی عمیق کننده تکراری(ادامه1)
جستجوی عمیق کننده تکراری(ادامه2)
جستجوی عمیق کننده تکراری(ادامه2)
A
B
C
D
E
F
G
H
I
J
K
L
N
M
O
P
Q
S
R
جستجوی عمیق کننده تکراری(ادامه3)
A
B
C
D
E
F
G
H
I
J
K
L
N
M
O
P
Q
S
R
جستجوی عمیق کننده تکراری(ادامه3)
کامل بودن: بله
در صورتی که فاکتور انشعاب محدود باشد
بهينگی: بله
کامل بودن: بله
در صورتی که فاکتور انشعاب محدود باشد
بهينگی: بله
جستجوی دو طرفه
انجام دو جست و جوی همزمان، يکي از حالت
جستجوی دو طرفه
انجام دو جست و جوی همزمان، يکي از حالت
جستجو از سمت هدف به چه معناست؟
تعریف)- ما قبل های
جستجو از سمت هدف به چه معناست؟
تعریف)- ما قبل های
کامل بودن: بله
اگر هر دو جستجو، عرضی باشند
بهينگی: بله
اگر هر
کامل بودن: بله
اگر هر دو جستجو، عرضی باشند
بهينگی: بله
اگر هر

ارزیابی راهبردهای جستجو
BFS
DFS
DLS
IDFS
BID
ارزیابی راهبردهای جستجو
BFS
DFS
DLS
IDFS
BID
اجتناب از حالتهای تکراری
وجود حالتهای تکراری در یک مسئله قابل حل
اجتناب از حالتهای تکراری
وجود حالتهای تکراری در یک مسئله قابل حل
دنیای جارو برقی فاقد حسگر
عامل جارو تمام اثرات فعاليتهايش را ميداند
دنیای جارو برقی فاقد حسگر
عامل جارو تمام اثرات فعاليتهايش را ميداند
 Фундаментальные структуры данных
Фундаментальные структуры данных создание кисти в фотошопе
создание кисти в фотошопе Introduction to informational and communication technologies
Introduction to informational and communication technologies Возвратные запчасти - GSFS
Возвратные запчасти - GSFS Языки программирования
Языки программирования Використання системних утиліт (урок 12)
Використання системних утиліт (урок 12) Антиплагиат. Система обнаружений текстовых заимствований в учебных и научных работах
Антиплагиат. Система обнаружений текстовых заимствований в учебных и научных работах Динамические структуры данных. Массивы и указатели
Динамические структуры данных. Массивы и указатели Элементы алгебры логики. Математические основы информатики (8 класс)
Элементы алгебры логики. Математические основы информатики (8 класс) Интернет-травля. Миф или реальность?
Интернет-травля. Миф или реальность? Разработка игр на Unity. Урок 4. Создание игровой механики
Разработка игр на Unity. Урок 4. Создание игровой механики Компьютерные сети
Компьютерные сети Структуры данных
Структуры данных Основы программирования
Основы программирования Class and Object. Java Core
Class and Object. Java Core Пример поиска информации на государственных образовательных порталах. Поисковые системы
Пример поиска информации на государственных образовательных порталах. Поисковые системы Manual QA course. Базы данных ( Lecture 16.1)
Manual QA course. Базы данных ( Lecture 16.1) Отчёт по производственной практике
Отчёт по производственной практике Линейные алгоритмы
Линейные алгоритмы Расчетные методики ПП ЭкоСфера-предприятие. Расчет выбросов от автотранспорта (Аккумуляторная)
Расчетные методики ПП ЭкоСфера-предприятие. Расчет выбросов от автотранспорта (Аккумуляторная) Планирование имитационных экспериментов
Планирование имитационных экспериментов основы информационной безопасности. Формальные модели ИБ. (Тема 3.3)
основы информационной безопасности. Формальные модели ИБ. (Тема 3.3) Использование алгоритма ветвления при решении физико-математических задач на Паскале
Использование алгоритма ветвления при решении физико-математических задач на Паскале Компьютерная графика. 7 класс
Компьютерная графика. 7 класс Создание списков. Разнообразие задач обработки информации
Создание списков. Разнообразие задач обработки информации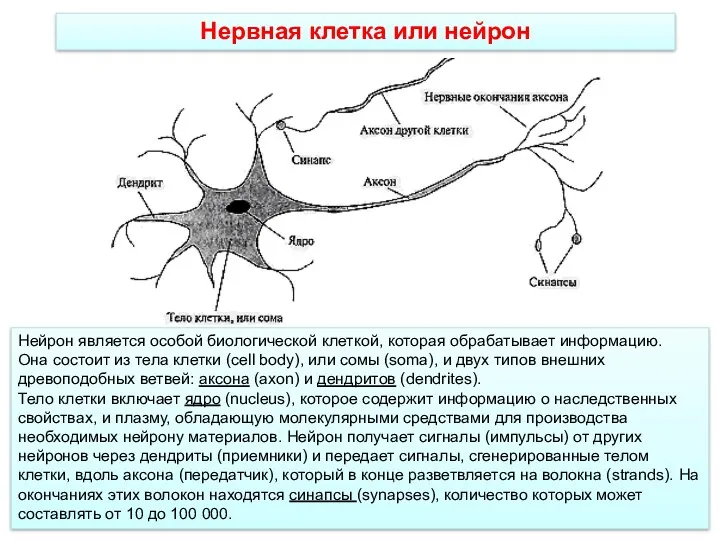 Нейронные сети
Нейронные сети Складові комп’ютера. 2 клас
Складові комп’ютера. 2 клас Отличительные признаки объектов
Отличительные признаки объектов