- Алгоритм управления роботом

Содержание
- 2. Критерии оценивания К концу урока Вы узнаете: - порядок планирования траектории движения робота; - функциональные возможности
- 3. Учебный вопрос 1 «Алгоритм управления роботом» Развитие современных технологий повлияло на появление большого количества роботов, для
- 4. Учебный вопрос 2 «Планирование траектории движения робота» Планирование траектории движения робота – задача выбора закона управления,
- 5. Учебный вопрос 3 «Модели и алгоритмы коллективного управления группой роботов» В современных боевых условиях управление роботом
- 7. Скачать презентацию
Критерии оценивания
К концу урока Вы узнаете:
- порядок планирования траектории движения робота;
Критерии оценивания
К концу урока Вы узнаете:
- порядок планирования траектории движения робота;
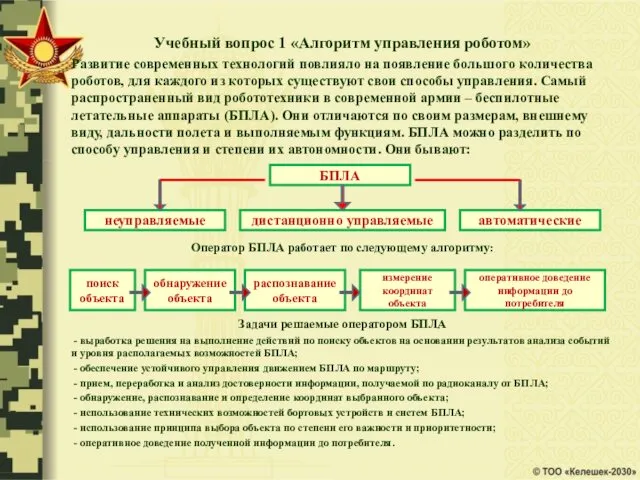
Учебный вопрос 1 «Алгоритм управления роботом»
Развитие современных технологий повлияло на появление
Учебный вопрос 1 «Алгоритм управления роботом»
Развитие современных технологий повлияло на появление
Учебный вопрос 2 «Планирование траектории движения робота»
Планирование траектории движения робота –
Учебный вопрос 2 «Планирование траектории движения робота»
Планирование траектории движения робота –
Учебный вопрос 3 «Модели и алгоритмы коллективного управления группой роботов»
В современных
Учебный вопрос 3 «Модели и алгоритмы коллективного управления группой роботов»
В современных
 Современные методы и техники выведывания информации
Современные методы и техники выведывания информации Информационные технологии в журналистике
Информационные технологии в журналистике Компьютерные вирусы и защита от них
Компьютерные вирусы и защита от них Складання алгоритмів
Складання алгоритмів Control and monitoring system (CMS)
Control and monitoring system (CMS) Основы технической диагностики
Основы технической диагностики Вкладені цикли. Покрокове введення та виведення даних. Лекція №8
Вкладені цикли. Покрокове введення та виведення даних. Лекція №8 ООО ИМС-Проект
ООО ИМС-Проект Інформатика як наука. Поняття про інформаційні системи та технології. Апаратне та програмне забезпечення ПК
Інформатика як наука. Поняття про інформаційні системи та технології. Апаратне та програмне забезпечення ПК Информационные технологии в обучении иностранному языку
Информационные технологии в обучении иностранному языку Методы и технология обработки фотоизображений
Методы и технология обработки фотоизображений Циклический алгоритм обработки массива чисел
Циклический алгоритм обработки массива чисел Компьютерная графика
Компьютерная графика Microsoft excel. Работа с формулами
Microsoft excel. Работа с формулами Персональный компьютер
Персональный компьютер Словарные методы сжатия. Лекция 3
Словарные методы сжатия. Лекция 3 Использование покрытия кода для определения объема протестированного кода
Использование покрытия кода для определения объема протестированного кода Объектно-ориентированное программирование. Классы
Объектно-ориентированное программирование. Классы История появления киберспорта в России
История появления киберспорта в России Открытые стандарты
Открытые стандарты Комп'ютерні презентації. Редагування тексту
Комп'ютерні презентації. Редагування тексту Архітектура комп’ютера. Класифікація та покоління обчислювальних систем. Основні показники та характеристики комп'ютерів
Архітектура комп’ютера. Класифікація та покоління обчислювальних систем. Основні показники та характеристики комп'ютерів HTML құжатында кестелерді қалыптастыру. Кесте параметрлерін тағайындау тегтері
HTML құжатында кестелерді қалыптастыру. Кесте параметрлерін тағайындау тегтері Презентация к уроку Основные компоненты компьютера и их функции
Презентация к уроку Основные компоненты компьютера и их функции Типы алгоритмов (3)
Типы алгоритмов (3) Стандартная процедура проверки документов
Стандартная процедура проверки документов Data Model. Lecture 2
Data Model. Lecture 2 Программирование на языке MATLAB. Графические возможности MATLAB
Программирование на языке MATLAB. Графические возможности MATLAB