- Алгоритмы поиска пути. От поиска в ширину до A

Содержание
- 2. Графы: основы Граф – множество вершин и ребер. Ребра соединяют между собой вершины. Графы бывают разные:
- 3. Графы: примеры Неориентированный невзвешенный Ориентированный взвешенный
- 4. Графы в играх Тайловая сетка(tile map, grid)
- 5. Графы в играх Полигональная карта(polygonal map)
- 6. Графы в играх Навигационная сетка(navigation mesh)
- 7. Графы в играх Почему тайловая сетка это граф?
- 8. Поиск кратчайшего пути: задача Есть вершина начала пути и вершина конца пути. Нужно найти кратчайший путь
- 9. Поиск кратчайшего пути: общие принципы Разбиваем клетки на два типа: посещенные и непосещенные. Постепенно посещаем клетки.
- 10. Поиск кратчайшего пути: обзор Поиск в ширину(breadth-first search) Алгоритм Дейкстры(Dijkstra's algorithm) Поиск первого наилучшего(best-first search) A*(A
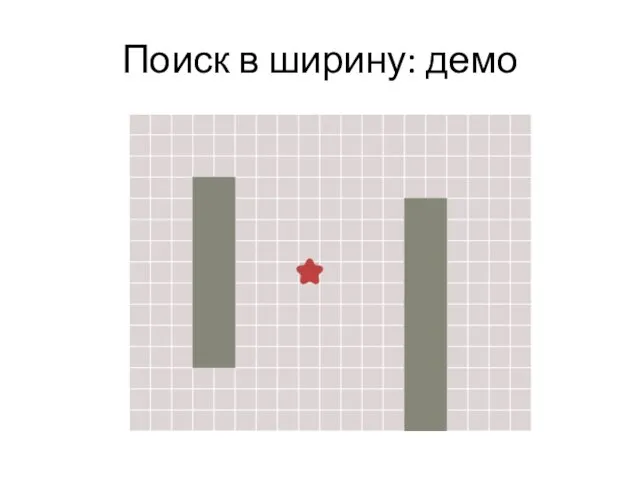
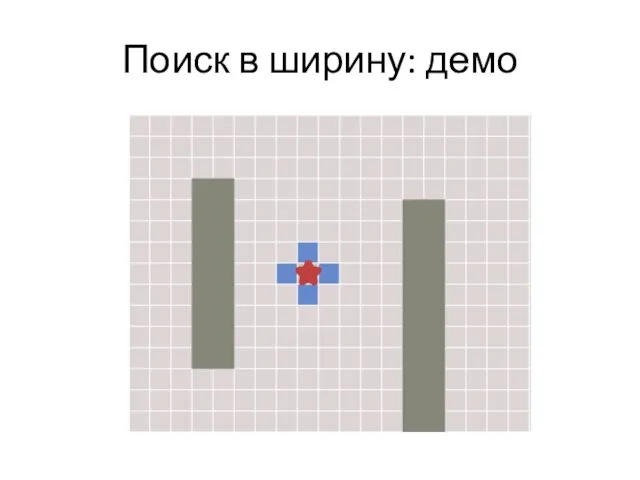
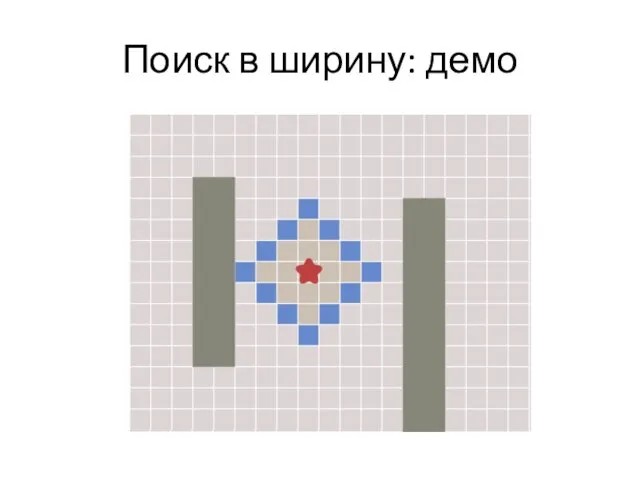
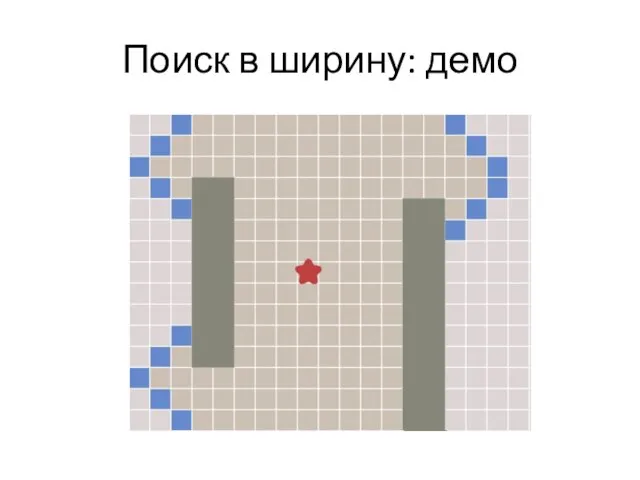
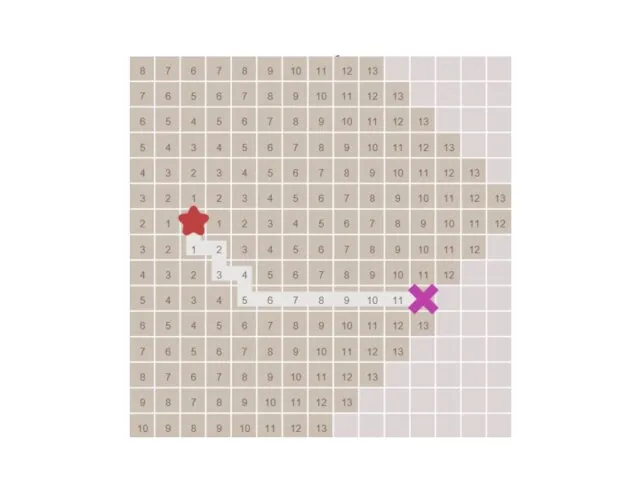
- 11. Поиск в ширину: идея Равномерно во все стороны расширяется радиус обхода. Посещенные вершины хранятся в очереди(queue).
- 12. Поиск в ширину: демо
- 13. Поиск в ширину: демо
- 14. Поиск в ширину: демо
- 15. Поиск в ширину: демо
- 16. Поиск в ширину: код Простейший вариант(инициализация) frontier = Queue() frontier.put(start) visited = {} visited[start] = True
- 17. Поиск в ширину: код Простейший вариант(алгоритм) while not frontier.empty(): current = frontier.get() for next in graph.neighbors(current):
- 18. Поиск в ширину: код Чтобы узнать, откуда пришли(инициализация) frontier = Queue() frontier.put(start) came_from = {} came_from[start]
- 19. Поиск в ширину: код Чтобы узнать, откуда пришли (алгоритм) while not frontier.empty(): current = frontier.get() for
- 21. Поиск в ширину: код Чтобы узнать кол-во шагов (инициализация) frontier = Queue() frontier.put(start) distance = {}
- 22. Поиск в ширину: код Чтобы узнать кол-во шагов(алгоритм) while not frontier.empty(): current = frontier.get() for next
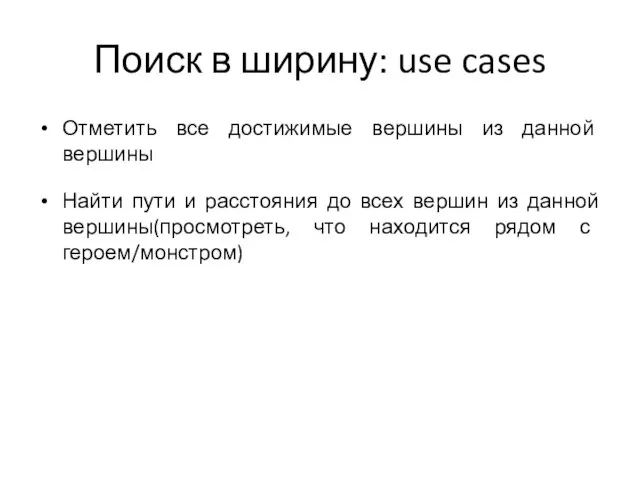
- 24. Поиск в ширину: use cases Отметить все достижимые вершины из данной вершины Найти пути и расстояния
- 25. Поиск в ширину: ограничения
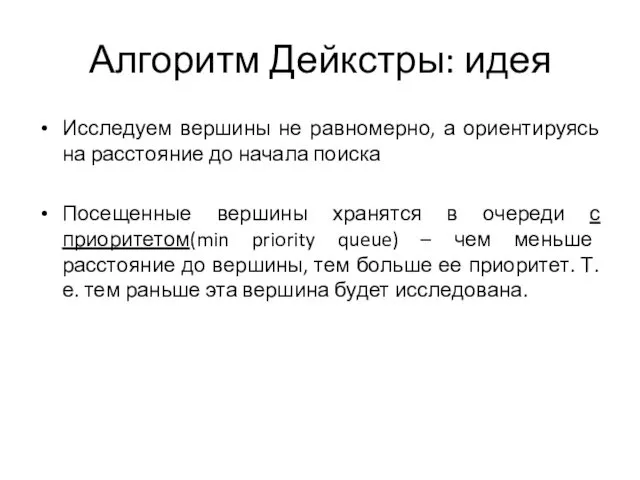
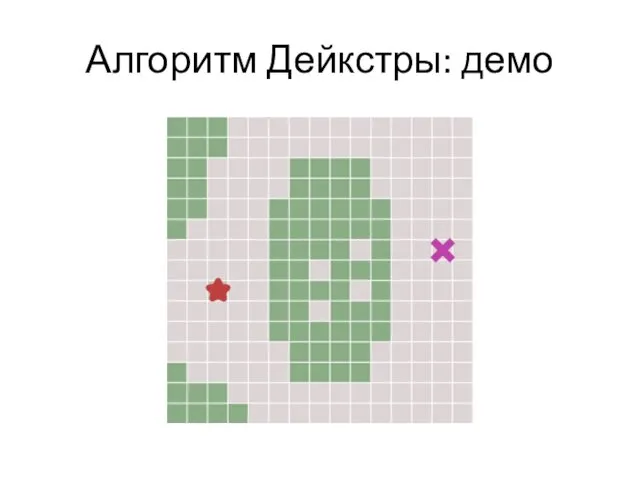
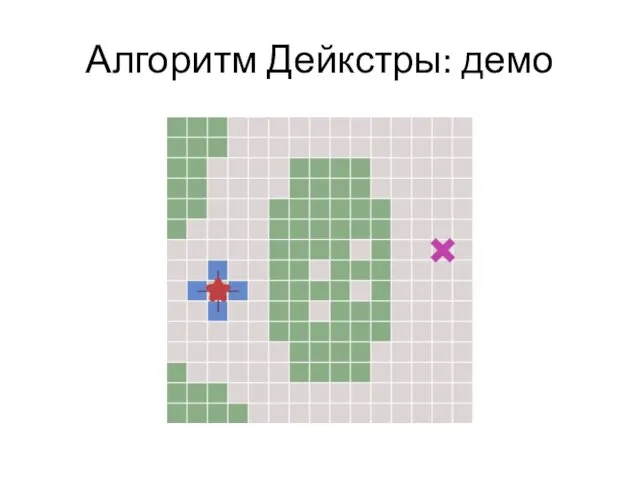
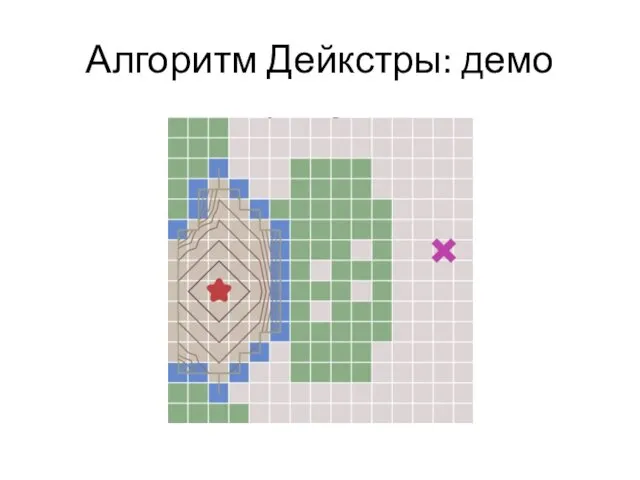
- 26. Алгоритм Дейкстры: идея Исследуем вершины не равномерно, а ориентируясь на расстояние до начала поиска Посещенные вершины
- 27. Алгоритм Дейкстры: демо
- 28. Алгоритм Дейкстры: демо
- 29. Алгоритм Дейкстры: демо
- 30. Алгоритм Дейкстры: демо
- 31. Алгоритм Дейкстры: демо
- 32. Алгоритм Дейкстры: код frontier = PriorityQueue() frontier.put(start,0) came_from = {} cost_so_far = {} came_from[start] = None
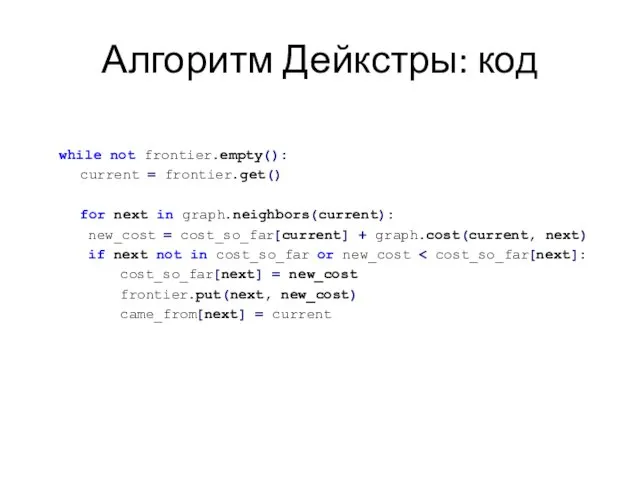
- 33. Алгоритм Дейкстры: код while not frontier.empty(): current = frontier.get() for next in graph.neighbors(current): new_cost = cost_so_far[current]
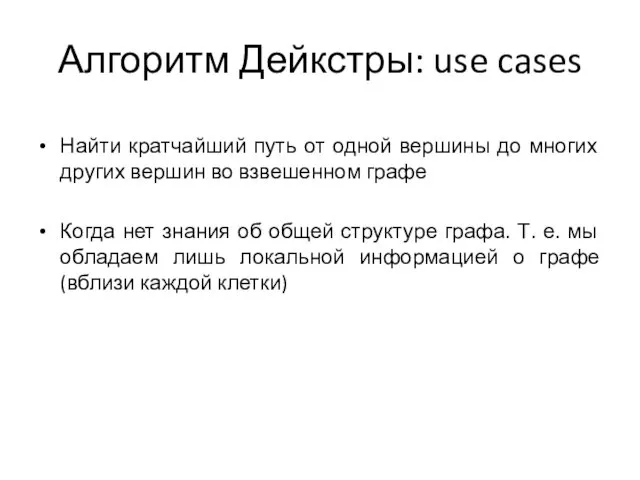
- 34. Алгоритм Дейкстры: use cases Найти кратчайший путь от одной вершины до многих других вершин во взвешенном
- 35. Алгоритм Дейкстры : ограничения Если нужно найти путь до единственной вершины, исследуется слишком много клеток
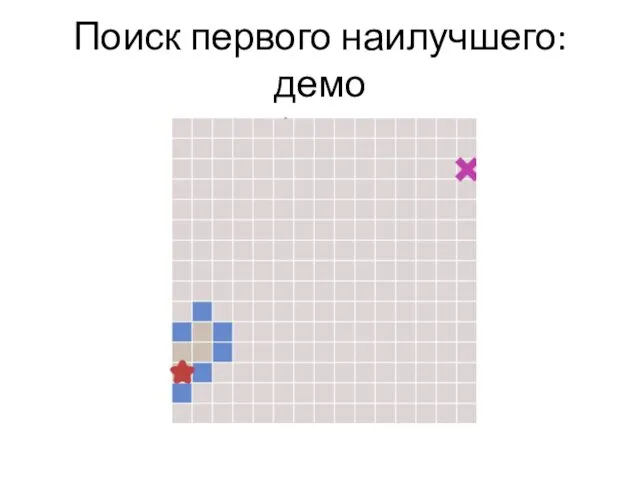
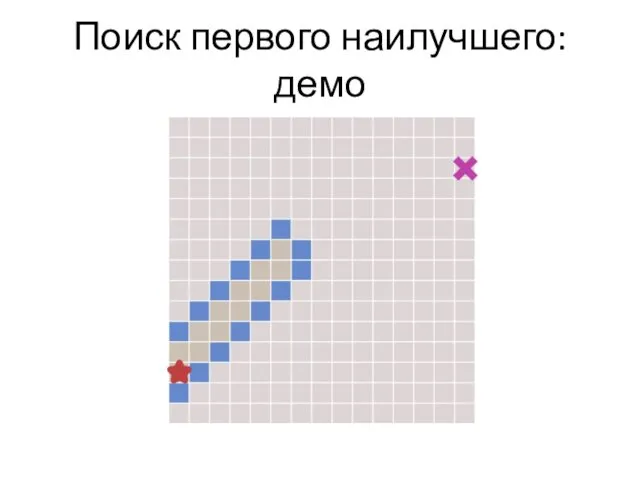
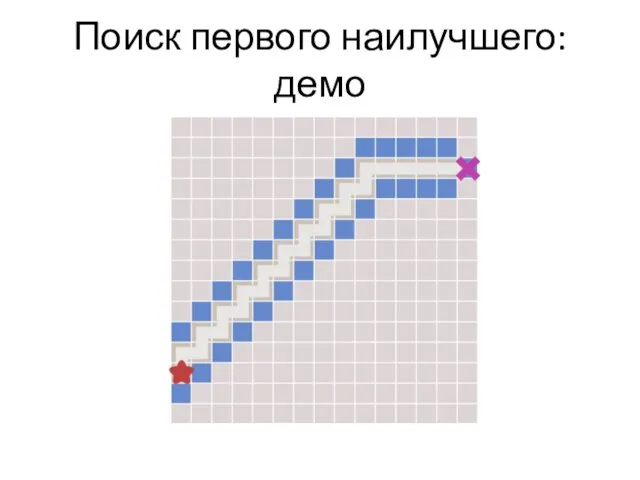
- 36. Поиск первого наилучшего: идея Исследуем вершины, ориентируясь на расстояние до цели Используем эвристику(heuristic)
- 37. Поиск первого наилучшего: демо
- 38. Поиск первого наилучшего: демо
- 39. Поиск первого наилучшего: демо
- 40. Поиск первого наилучшего: демо
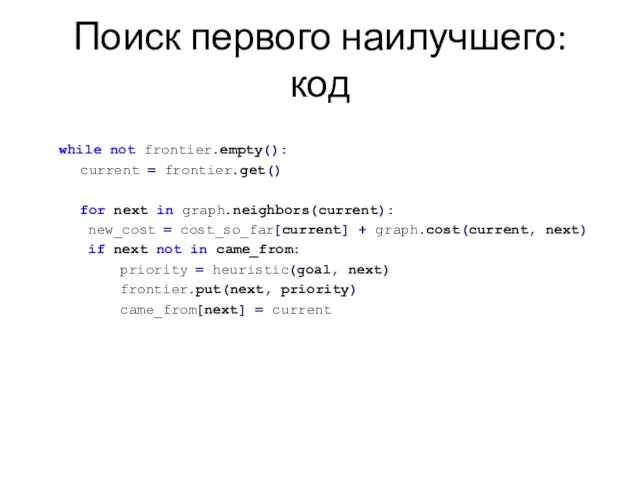
- 41. Поиск первого наилучшего: код frontier = PriorityQueue() frontier.put(start, 0) came_from = {} came_from[start] = None
- 42. Поиск первого наилучшего: код while not frontier.empty(): current = frontier.get() for next in graph.neighbors(current): new_cost =
- 43. Поиск первого наилучшего: use cases Быстро найти кратчайший путь от одной вершины до другой, когда нет
- 44. Поиск первого наилучшего: ограничения Кратчайший путь не найден
- 45. A*: идея Исследуем вершины не равномерно, а ориентируясь на расстояние до начала поиска… И на расстояние
- 46. A*: демо
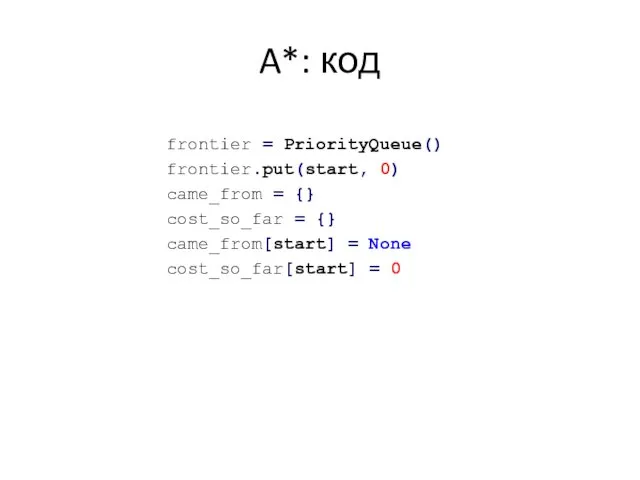
- 47. A*: код frontier = PriorityQueue() frontier.put(start, 0) came_from = {} cost_so_far = {} came_from[start] = None
- 48. A*: код while not frontier.empty(): current = frontier.get() for next in graph.neighbors(current): new_cost = cost_so_far[current] +
- 49. A*: use cases Быстро найти кратчайший путь от одной вершины до другой, даже если есть препятствия
- 50. A*: эвристики Эвристики бывают разные. От выбора эвристики зависит корректность алгоритма и его быстрота. Манхэтонновское расстояние
- 51. A*: эвристики Диагональное расстояние
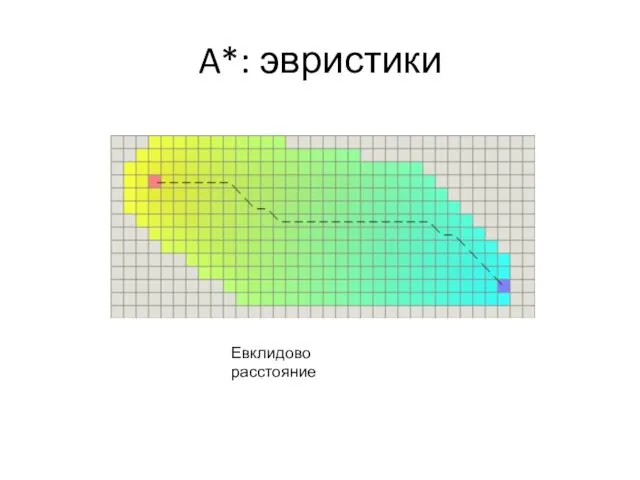
- 52. A*: эвристики Евклидово расстояние
- 54. Скачать презентацию
Графы: основы
Граф – множество вершин и ребер.
Ребра соединяют между собой вершины.
Графы
Графы: основы
Граф – множество вершин и ребер.
Ребра соединяют между собой вершины.
Графы
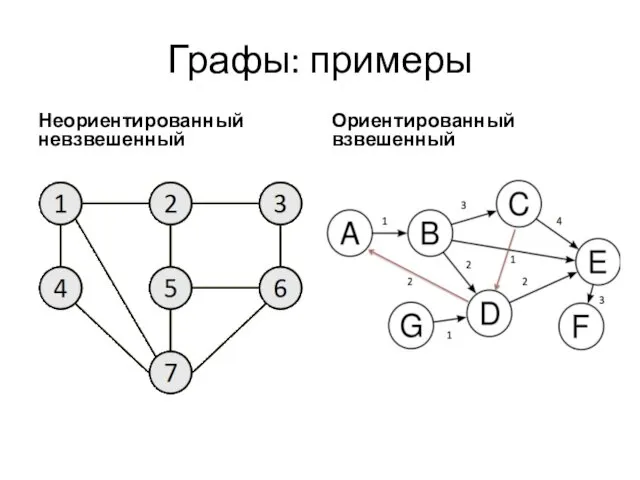
Графы: примеры
Неориентированный невзвешенный
Ориентированный взвешенный
Графы: примеры
Неориентированный невзвешенный
Ориентированный взвешенный

Графы в играх
Тайловая сетка(tile map, grid)
Графы в играх
Тайловая сетка(tile map, grid)
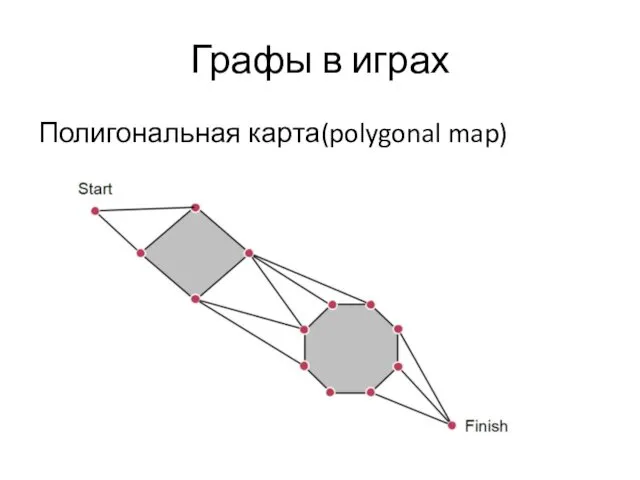
Графы в играх
Полигональная карта(polygonal map)
Графы в играх
Полигональная карта(polygonal map)
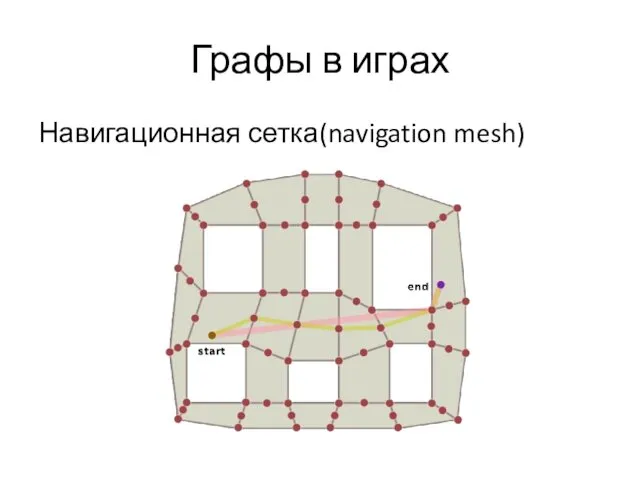
Графы в играх
Навигационная сетка(navigation mesh)
Графы в играх
Навигационная сетка(navigation mesh)
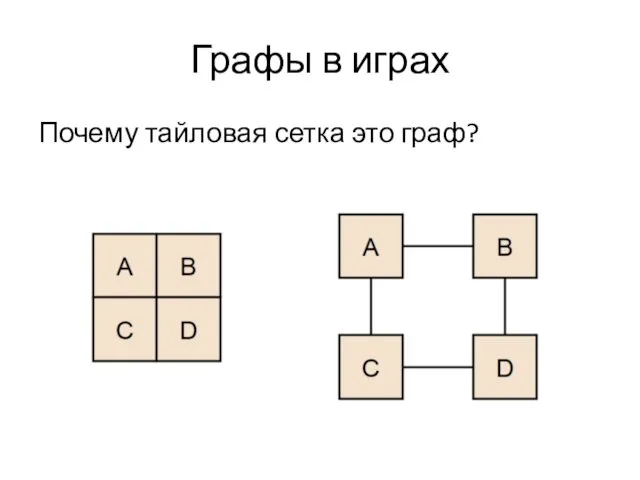
Графы в играх
Почему тайловая сетка это граф?
Графы в играх
Почему тайловая сетка это граф?

Поиск кратчайшего пути: задача
Есть вершина начала пути и вершина конца пути.
Поиск кратчайшего пути: задача
Есть вершина начала пути и вершина конца пути.
Поиск кратчайшего пути: общие принципы
Разбиваем клетки на два типа: посещенные и
Поиск кратчайшего пути: общие принципы
Разбиваем клетки на два типа: посещенные и
Поиск кратчайшего пути: обзор
Поиск в ширину(breadth-first search)
Алгоритм Дейкстры(Dijkstra's algorithm)
Поиск первого наилучшего(best-first search)
A*(A
Поиск кратчайшего пути: обзор
Поиск в ширину(breadth-first search)
Алгоритм Дейкстры(Dijkstra's algorithm)
Поиск первого наилучшего(best-first search)
A*(A
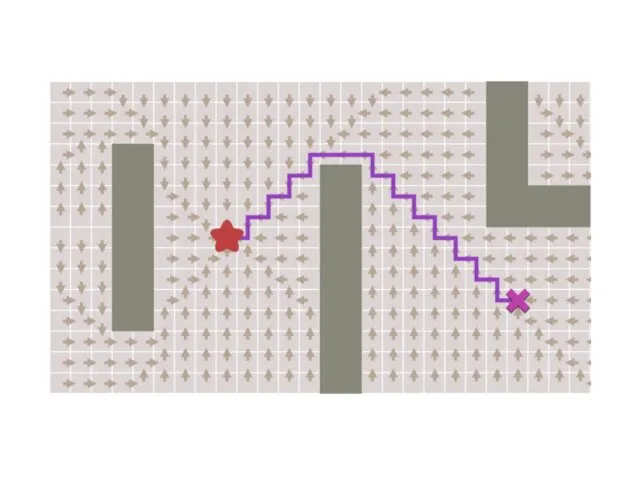
Поиск в ширину: идея
Равномерно во все стороны расширяется радиус обхода.
Посещенные вершины
Поиск в ширину: идея
Равномерно во все стороны расширяется радиус обхода.
Посещенные вершины
Поиск в ширину: демо
Поиск в ширину: демо
Поиск в ширину: демо
Поиск в ширину: демо
Поиск в ширину: демо
Поиск в ширину: демо
Поиск в ширину: демо
Поиск в ширину: демо
![Поиск в ширину: код Простейший вариант(инициализация) frontier = Queue() frontier.put(start) visited = {} visited[start] = True](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/105810/slide-15.jpg)
Поиск в ширину: код
Простейший вариант(инициализация)
frontier = Queue()
frontier.put(start)
visited = {}
visited[start] = True
Поиск в ширину: код
Простейший вариант(инициализация)
frontier = Queue()
frontier.put(start)
visited = {}
visited[start] = True
Поиск в ширину: код
Простейший вариант(алгоритм)
while not frontier.empty():
current = frontier.get()
for next in
Поиск в ширину: код
Простейший вариант(алгоритм)
while not frontier.empty():
current = frontier.get()
for next in
Поиск в ширину: код
Чтобы узнать, откуда пришли(инициализация)
frontier = Queue()
frontier.put(start)
came_from =
Поиск в ширину: код
Чтобы узнать, откуда пришли(инициализация)
frontier = Queue()
frontier.put(start)
came_from =
Поиск в ширину: код
Чтобы узнать, откуда пришли (алгоритм)
while not frontier.empty():
current =
Поиск в ширину: код
Чтобы узнать, откуда пришли (алгоритм)
while not frontier.empty():
current =

Поиск в ширину: код
Чтобы узнать кол-во шагов (инициализация)
frontier = Queue()
frontier.put(start)
distance
Поиск в ширину: код
Чтобы узнать кол-во шагов (инициализация)
frontier = Queue()
frontier.put(start)
distance
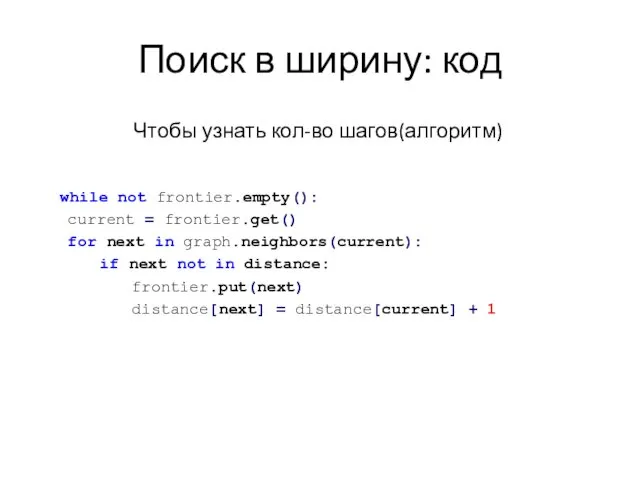
Поиск в ширину: код
Чтобы узнать кол-во шагов(алгоритм)
while not frontier.empty():
current = frontier.get()
for
Поиск в ширину: код
Чтобы узнать кол-во шагов(алгоритм)
while not frontier.empty():
current = frontier.get()
for
Поиск в ширину: use cases
Отметить все достижимые вершины из данной вершины
Найти
Поиск в ширину: use cases
Отметить все достижимые вершины из данной вершины
Найти

Поиск в ширину: ограничения
Поиск в ширину: ограничения
Алгоритм Дейкстры: идея
Исследуем вершины не равномерно, а ориентируясь на расстояние до
Алгоритм Дейкстры: идея
Исследуем вершины не равномерно, а ориентируясь на расстояние до
Алгоритм Дейкстры: демо
Алгоритм Дейкстры: демо
Алгоритм Дейкстры: демо
Алгоритм Дейкстры: демо
Алгоритм Дейкстры: демо
Алгоритм Дейкстры: демо

Алгоритм Дейкстры: демо
Алгоритм Дейкстры: демо

Алгоритм Дейкстры: демо
Алгоритм Дейкстры: демо
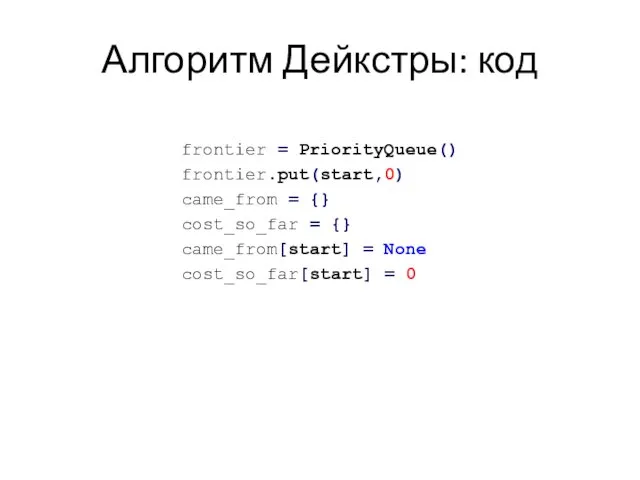
Алгоритм Дейкстры: код
frontier = PriorityQueue()
frontier.put(start,0)
came_from = {}
cost_so_far = {}
came_from[start] = None
cost_so_far[start]
Алгоритм Дейкстры: код
frontier = PriorityQueue()
frontier.put(start,0)
came_from = {}
cost_so_far = {}
came_from[start] = None
cost_so_far[start]
Алгоритм Дейкстры: код
while not frontier.empty():
current = frontier.get()
for next in graph.neighbors(current):
new_cost
Алгоритм Дейкстры: код
while not frontier.empty():
current = frontier.get()
for next in graph.neighbors(current):
new_cost
Алгоритм Дейкстры: use cases
Найти кратчайший путь от одной вершины до многих
Алгоритм Дейкстры: use cases
Найти кратчайший путь от одной вершины до многих

Алгоритм Дейкстры : ограничения
Если нужно найти путь до единственной вершины, исследуется
Алгоритм Дейкстры : ограничения
Если нужно найти путь до единственной вершины, исследуется
Поиск первого наилучшего: идея
Исследуем вершины, ориентируясь на расстояние до цели
Используем эвристику(heuristic)
Поиск первого наилучшего: идея
Исследуем вершины, ориентируясь на расстояние до цели
Используем эвристику(heuristic)
Поиск первого наилучшего: демо
Поиск первого наилучшего: демо
Поиск первого наилучшего: демо
Поиск первого наилучшего: демо
Поиск первого наилучшего: демо
Поиск первого наилучшего: демо
Поиск первого наилучшего: демо
Поиск первого наилучшего: демо
![Поиск первого наилучшего: код frontier = PriorityQueue() frontier.put(start, 0) came_from = {} came_from[start] = None](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/105810/slide-40.jpg)
Поиск первого наилучшего: код
frontier = PriorityQueue()
frontier.put(start, 0)
came_from = {}
came_from[start] = None
Поиск первого наилучшего: код
frontier = PriorityQueue()
frontier.put(start, 0)
came_from = {}
came_from[start] = None
Поиск первого наилучшего: код
while not frontier.empty():
current = frontier.get()
for next in
Поиск первого наилучшего: код
while not frontier.empty():
current = frontier.get()
for next in
Поиск первого наилучшего: use cases
Быстро найти кратчайший путь от одной вершины
Поиск первого наилучшего: use cases
Быстро найти кратчайший путь от одной вершины

Поиск первого наилучшего: ограничения
Кратчайший путь не найден
Поиск первого наилучшего: ограничения
Кратчайший путь не найден
A*: идея
Исследуем вершины не равномерно, а ориентируясь на расстояние до начала
A*: идея
Исследуем вершины не равномерно, а ориентируясь на расстояние до начала
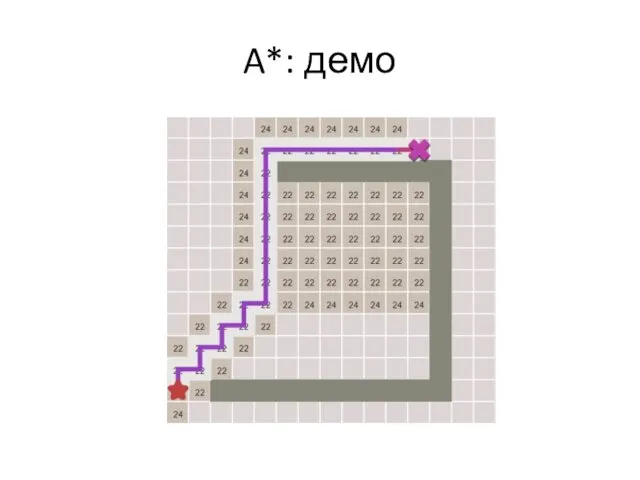
A*: демо
A*: демо
A*: код
frontier = PriorityQueue()
frontier.put(start, 0)
came_from = {}
cost_so_far = {}
came_from[start] = None
cost_so_far[start]
A*: код
frontier = PriorityQueue()
frontier.put(start, 0)
came_from = {}
cost_so_far = {}
came_from[start] = None
cost_so_far[start]
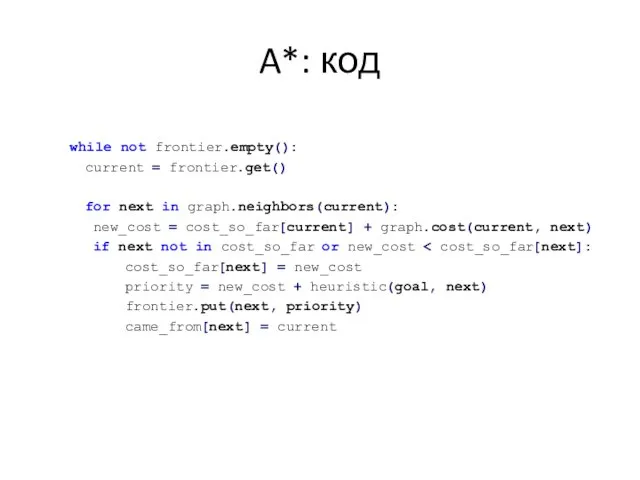
A*: код
while not frontier.empty():
current = frontier.get()
for next in graph.neighbors(current):
new_cost =
A*: код
while not frontier.empty():
current = frontier.get()
for next in graph.neighbors(current):
new_cost =
A*: use cases
Быстро найти кратчайший путь от одной вершины до другой,
A*: use cases
Быстро найти кратчайший путь от одной вершины до другой,
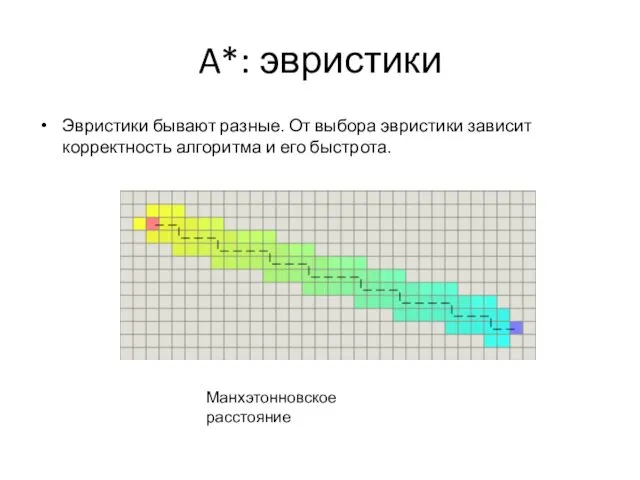
A*: эвристики
Эвристики бывают разные. От выбора эвристики зависит корректность алгоритма и
A*: эвристики
Эвристики бывают разные. От выбора эвристики зависит корректность алгоритма и
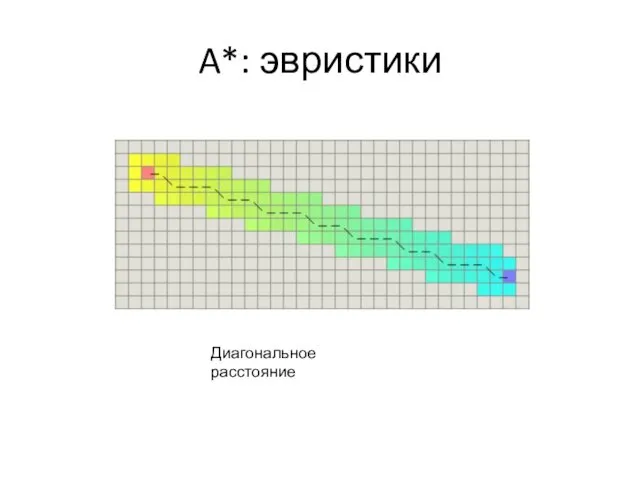
A*: эвристики
Диагональное расстояние
A*: эвристики
Диагональное расстояние
A*: эвристики
Евклидово расстояние
A*: эвристики
Евклидово расстояние
 Введение в курс Manual QA. (Лекция 1.1)
Введение в курс Manual QA. (Лекция 1.1) Программирование Python. Списки (list): Часть 1 Одномерные массивы (Лекция 9)
Программирование Python. Списки (list): Часть 1 Одномерные массивы (Лекция 9) Сучасний підхід до обліку земельного банку від ОМП
Сучасний підхід до обліку земельного банку від ОМП Python. Основы. Работа с файлами. Лекция 11
Python. Основы. Работа с файлами. Лекция 11 ВКР: Разработка прототипа автоматизированного рабочего места диспетчера учебного учреждения
ВКР: Разработка прототипа автоматизированного рабочего места диспетчера учебного учреждения Понятие и основные задачи информатики
Понятие и основные задачи информатики Влияние интернета на культуру и язык учащихся
Влияние интернета на культуру и язык учащихся Деректер базасының архитектурасы
Деректер базасының архитектурасы История серии видеоигр: Crysis, Wolfenstein, Dead Space
История серии видеоигр: Crysis, Wolfenstein, Dead Space Позиционирование и продвижение в соцсетях
Позиционирование и продвижение в соцсетях Лекция 1. Основные понятия баз данных и СУБД
Лекция 1. Основные понятия баз данных и СУБД Работа с файлами. Глава 5
Работа с файлами. Глава 5 Неиерархические классификации
Неиерархические классификации Информационная система автоматизированного управления работой сервиса по ремонту автомобилей
Информационная система автоматизированного управления работой сервиса по ремонту автомобилей Базы данных и SQL. Семинар 3
Базы данных и SQL. Семинар 3 Вкладені алгоритмічні структури повторення з передумовою та лічильником
Вкладені алгоритмічні структури повторення з передумовою та лічильником Основные процессы жизненного цикла АИС
Основные процессы жизненного цикла АИС Растровая и векторная графика
Растровая и векторная графика Written Scientific and Technical Communication
Written Scientific and Technical Communication Аптека 1С:Розница 8
Аптека 1С:Розница 8 Informasion prosesler: informasiýalary saklamak, geçirmek, täzeden işlemek, gözlemek
Informasion prosesler: informasiýalary saklamak, geçirmek, täzeden işlemek, gözlemek Создание программного продукта генерации бланковых тестов
Создание программного продукта генерации бланковых тестов Представление числовой информации с помощью систем счисления Урок информатики в 10 классе
Представление числовой информации с помощью систем счисления Урок информатики в 10 классе Git Система контроля версий
Git Система контроля версий Испытания РЭА в процессе производства и эксплуатации
Испытания РЭА в процессе производства и эксплуатации Искусственный интеллект как субъект трудового права: реально или нет?
Искусственный интеллект как субъект трудового права: реально или нет? Безопасный Интернет
Безопасный Интернет Виды базы данных
Виды базы данных