- Анализ систем управления движением

Содержание
- 2. Анализ сводится к исследованию зависимости между сигналом, поданным на вход системы (входным сигналом), и сигналом, полученным
- 12. Принципы анализа систем управления физичности моделируемости целенаправленности
- 13. Принцип физичности: всякой системе (независимо от ее природы) присущи законы (закономерности), возможно, уникальные, определяющие внутренние причинно-следственные
- 14. Постулат целостности. Сложная система управления должна рассматриваться как единое целое. Постулат декомпозиции систем. Анализ сложной системы
- 15. Принцип моделируемости: сложная система может быть представлена конечным множеством моделей, каждая из которых отражает определенную грань
- 16. Постулат действий. Для изменения поведения системы требуется прирост воздействия, превосходящего некоторое пороговое значение. Постулат неопределенности. Существует
- 17. Постулат многообразия моделей. Определение характеристик системы на всех уровнях производится с помощью множества моделей, которые в
- 18. Постулат внешнего дополнения. Проверка истинности результатов, получаемых на каждом уровне, производится с использованием исходных данных, моделей
- 19. Целенаправленность системы - функциональная тенденция, направленная на достижение системой некоторого состояния либо на усиление (или сохранение)
- 20. Постулат выбора. Сложная система обладает способностью к выбору поведения, и, следовательно, однозначно предсказать и экстраполировать ее
- 21. Познание и практическое использование этого постулата имеет два аспекта. Первый - стимулирование или подавление "свободы" выбора.
- 22. Виды анализа систем управления структурный функциональный информационный параметрический
- 23. Структурный анализ систем управления Структура - это внутренняя организация системы, которая способствует связи составляющих систему элементов.
- 24. Сущностью структурного анализа является определение статических характеристик системы по ее структуре. Структурный анализ проводится путем выделения
- 25. В качестве показателей исследуемых структур целесообразно использовать: множество выделенных элементов, отношений и связей; характеристики элементов и
- 26. Процедура определения показателей структуры включает следующие этапы: определение исходных данных для оценки структуры; вычисление значений характеристик
- 27. Функциональный анализ систем управления Сущностью функционального анализа является определение динамических характеристик системы на основании принятых алгоритмов
- 28. Основные этапы функционального анализа: определение и описание общего процесса управления, реализуемого исследуемой системой; декомпозиция общего процесса
- 29. Информационный анализ систем управления Объектом информационного анализа являются информационные процессы, протекающие в системе управления. Рассмотрим: коммуникационную
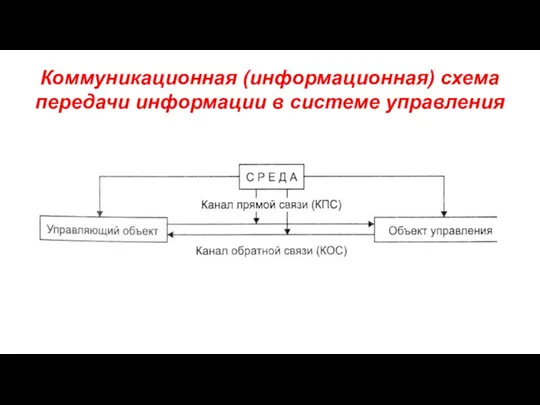
- 30. Коммуникационная (информационная) схема передачи информации в системе управления
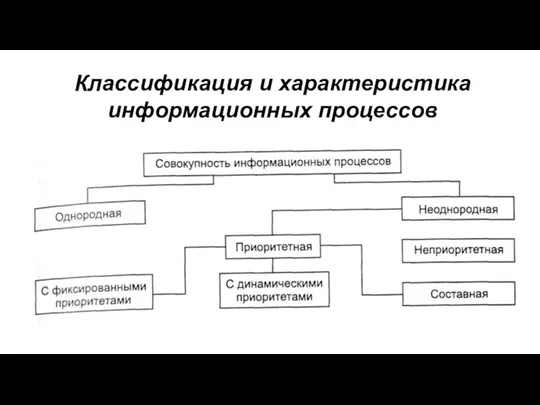
- 31. Классификация и характеристика информационных процессов
- 32. Простой ИП Сложный ветвящиеся ИП Сложный ИП с размножением
- 33. Структура информационных процессов
- 34. Процедура информационного анализа: определение потребности в информации на каждой стадии управления; планирование потребностей в информации; определение
- 35. К показателям информации относятся: объем и скорость передачи информации; достоверность передаваемых сообщений; направление информационных потоков; характеристики
- 36. Параметрический анализ систем управления Сущностью анализа является определение необходимой и достаточной совокупности показателей, характеризующих все исследуемые
- 37. Анализ линейных непрерывных систем
- 38. Система обладает свойством аддитивности, если сумма входов u3(t) = u1(t) + u2(t) порождает сумму выходов y3(t)
- 39. ДИНАМИЧЕСКИЕ МОДЕЛИ ОБЪЕКТОВ И СИСТЕМ УПРАВЛЕНИЯ Динамические модели объектов и систем управления можно разбить на два
- 40. Для описания динамики непрерывного линейного объекта, имеющего вход u(t) и выход y(t), довольно часто используется дифференциальное
- 41. Представление моделей объектов и систем управления в пространстве состояний широко используется в теории управления, начиная с
- 42. Устойчивость линейных систем Необходимое и достаточное условие устойчивости линейной системы состоит в том, чтобы корни соответствующего
- 43. ИНВАРИАНТНОСТЬ, КОВАРИАНТНОСТЬ И ЧУВСТВИТЕЛЬНОСТЬ СИСТЕМ УПРАВЛЕНИЯ Одна из важнейших задач системы управления состоит в значительном снижении
- 44. Формы инвариантности и ковариантности Абсолютная инвариантность предполагает равенство нулю передаточной функции по каналу возмущения для всех
- 45. Реализация абсолютной инвариантности сложно, поэтому добиваются условия инвариантности до ε, ограничивая степень и порядок полинома числителя
- 46. На рисунке а изображены графики абсолютно инвариантной (1) и инвариантной до ε (2) систем. АЧХ абсолютно
- 47. Инвариантность систем с типовой структурой Различают три основных вида инвариантности: последовательную и параллельную компенсацию возмущений, и
- 48. Абсолютная инвариантность выходной переменной справедлива, при выполнении условия Инвариантность до ε достигается, если Селективная абсолютная инвариантность
- 49. Абсолютная инвариантность выхода объекта y к возмущению v достигается при выполнении условия Параллельная компенсация
- 50. Компенсацию в системе с обратной связью Условие абсолютной инвариантности только за счет обратной связи не может
- 51. Чувствительность систем управления Помимо воздействия среды, на систему оказывает влияние изменение параметров операторов преобразования, составляющих эту
- 52. Абсолютная чувствительность передаточной функции системы Φ(s) к вариации передаточной функции звена W(s) определяется как частная производная
- 53. АНАЛИЗ КАЧЕСТВА СИСТЕМ УПРАВЛЕНИЯ ДВИЖЕНИЕМ Прямые показатели качества определяются непосредственно из переходного процесса системы. К ним
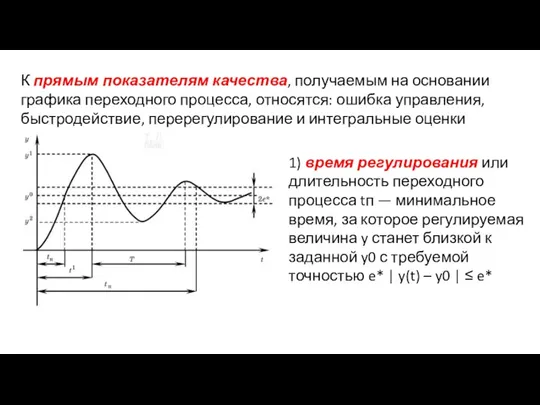
- 54. К прямым показателям качества, получаемым на основании графика переходного процесса, относятся: ошибка управления, быстродействие, перерегулирование и
- 55. 3) время достижения первого максимума t1; 4) время нарастания переходного процесса tн до первого пересечения с
- 56. Интегральные показатели качества, как правило, оценивают переходный процесс по динамической ошибке e(t) = y0 – y(t)
- 57. Косвенные показатели качества Запас устойчивости по модулю Запас устойчивости по фазе Показатель колебательности — максимальное значение
- 58. Корневые оценки качества основываются на расположении корней характеристического уравнения замкнутой системы. Степень устойчивости — это расстояние
- 59. МЕТОД КОРНЕВОГО ГОДОГРАФА Качество переходного процесса системы управления зависит от положения корней ее характеристического уравнения на
- 64. Все реальные системы управления — нелинейные! Линейные модели систем являются идеализациями реальных систем. Свойства движений нелинейной
- 65. Математической моделью движения управляемой нелинейной системы u = (u1, . . , um)T , y =
- 66. Внешняя математическая модель или модель типа вход-выход нелинейной автоматической системы представляется канонической структурой и содержит описание
- 67. Характеристики «вход-выход» основных нелинейных элементов: а — идеального реле; б — насыщения; в — нечувствительности; г
- 68. ТОПОЛОГИЧЕСКИЕ МЕТОДЫ АНАЛИЗА НЕЛИНЕЙНЫХ СИСТЕМ Топологические методы анализа являются не только качественными, но и количественными методами
- 69. Интегральная кривая x(t) — это график решения системы. В каждой точке пространства состояния системы определен вектор
- 70. Рассмотрим систему второго порядка уравнение фазовых траекторий на фазовой плоскости Особые точки фазового портрета системы определят
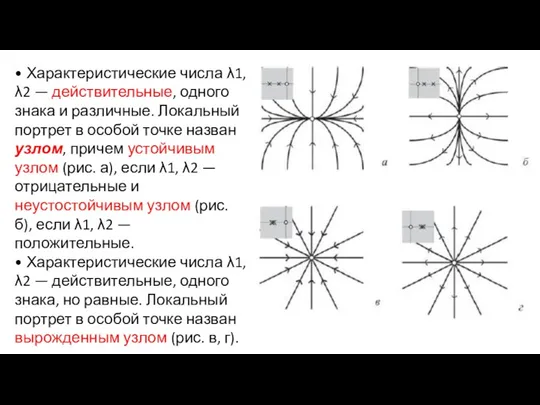
- 71. • Характеристические числа λ1, λ2 — действительные, одного знака и различные. Локальный портрет в особой точке
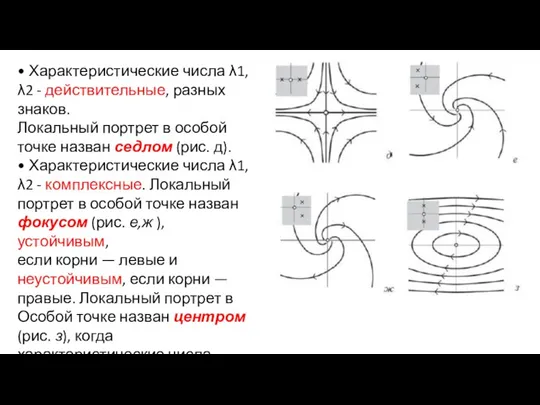
- 72. • Характеристические числа λ1, λ2 - действительные, разных знаков. Локальный портрет в особой точке назван седлом
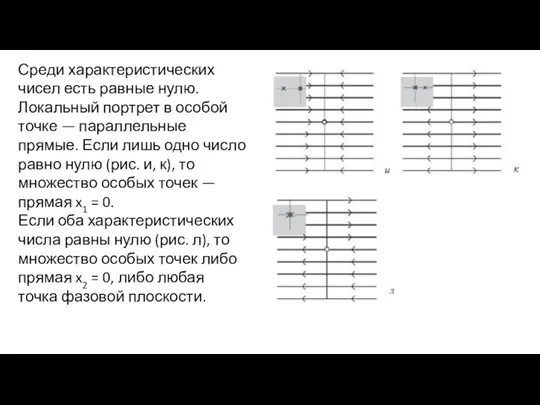
- 73. Среди характеристических чисел есть равные нулю. Локальный портрет в особой точке — параллельные прямые. Если лишь
- 74. ЛИНЕЙНЫЕ ПРЕДСТАВЛЕНИЯ НЕЛИНЕЙНОЙ МОДЕЛИ Линеаризация как представление модели нелинейной системы в линейном виде является простейшим методом,
- 75. Касательная линеаризация осуществляется в предположении, что движение нелинейной системы происходит в достаточно малой окрестности рабочей точки
- 76. Гармоническая линеаризация осуществляется не во временной области, а в частотной, для систем, работающих с гармоническими сигналами.
- 77. Стохастическая линеаризация осуществляется во временной области для систем, испытывающих случайные возмущения. Метод состоит в аппроксимации нелинейной
- 78. Метод гармонической линеаризации (Н. М. Крылов, Н. Н. Боголюбов, 1934), основывается на трех допущениях 1. выходной
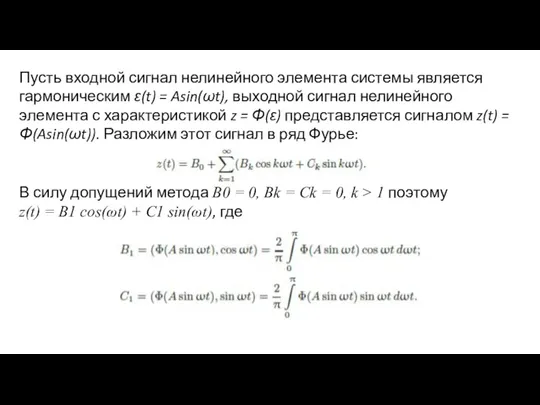
- 79. Пусть входной сигнал нелинейного элемента системы является гармоническим ε(t) = Asin(ωt), выходной сигнал нелинейного элемента с
- 80. Обозначив получим Выходной сигнал нелинейного элемента оказывается почти гармоническим. Нелинейный элемент ведет себя почти как линейное
- 81. Выражение N(A;ω) называют эквивалентной передаточной функцией, или описывающей функцией, или комплексным передаточным коэффициентом нелинейного элемента системы.
- 82. Описывающая функция N(A;ω) является комплексной функцией амплитуды гармонического входного воздействия, при этом частота входного сигнала оказывается
- 83. Коэффициенты гармонической линеаризации находят из выражений: Заметим, что для однозначных характеристик нелинейных звеньев
- 84. Стохастическая линеаризация Пусть ε(t) — стационарный эргодический случайный процесс с нулевым средним, тогда и выходной сигнал
- 85. Стационарный случайный процесс называется эргодическим, если любая его вероятностная характеристика, полученная усреднением по множеству возможных реализаций,
- 86. Выражение для коэффициента стохастической линеаризации найдем, применив необходимые условия экстремума к функции получим соотношение Из этого
- 87. Пусть входной случайный процесс — шум с плотностью f(ε), нулевым средним и дисперсией σ2, тогда коэффициент
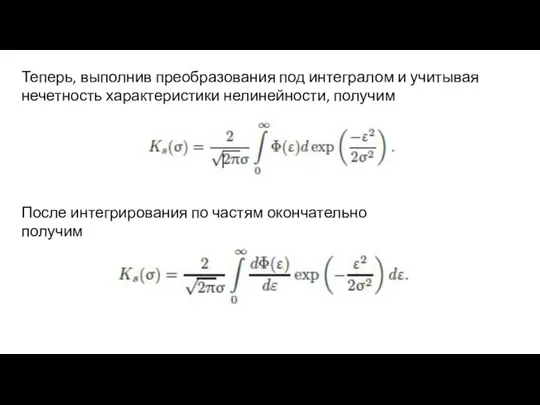
- 88. Если входной случайный процесс является нормальным гауссовым процессом и характеристика нелинейности непрерывно дифференцируемая, то выражение для
- 89. Теперь, выполнив преобразования под интегралом и учитывая нечетность характеристики нелинейности, получим После интегрирования по частям окончательно
- 90. АНАЛИЗ УСТОЙЧИВОСТИ НЕЛИНЕЙНЫХ СИСТЕМ УСТОЙЧИВОСТЬ ДВИЖЕНИЙ НЕЛИНЕЙНОЙ СИСТЕМЫ В МАЛОМ Движения нелинейных систем гораздо более сложные
- 91. Понятия устойчивости и асимптотической устойчивости по Ляпунову позволяют анализировать движения системы в окрестности положения покоя. Эти
- 92. Рассмотрим автономную нелинейную систему и ее точку покоя x∗. Пусть x(t) = x∗ + δx(t), где
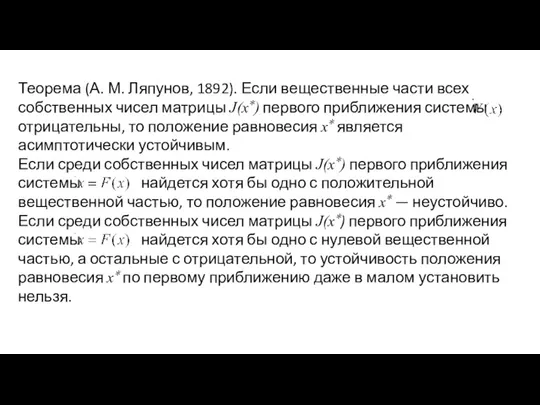
- 93. Теорема (А. М. Ляпунов, 1892). Если вещественные части всех собственных чисел матрицы J(x∗) первого приближения системы
- 94. Пример Исследовать устойчивость в малом особых точек системы первого порядка Система имеет счетное множество точек покоя
- 95. АНАЛИЗ УСТОЙЧИВОСТИ НЕЛИНЕЙНОЙ СИСТЕМЫ В БОЛЬШОМ И В ЦЕЛОМ Положение равновесия x∗ системы асимптотически устойчиво в
- 96. Фундаментальным методом исследования устойчивости движения является второй метод Ляпунова, основное достоинство которого состоит в том, что
- 97. Скалярную функцию векторного аргумента V(x) непрерывную вместе со своими первыми частными производными в некоторой области G,
- 98. Теоремы (А. М. Ляпунов, 1892) 1. Об устойчивости в большом. Если в некоторой ограниченной области G,
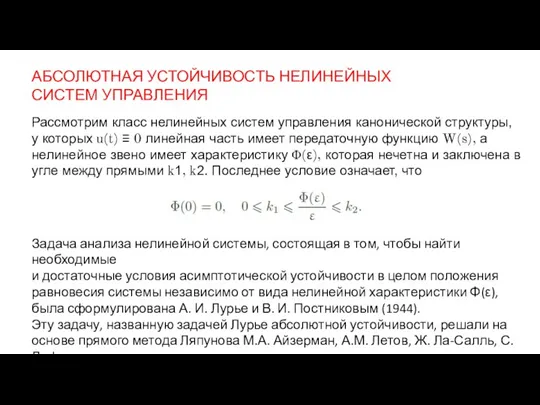
- 99. АБСОЛЮТНАЯ УСТОЙЧИВОСТЬ НЕЛИНЕЙНЫХ СИСТЕМ УПРАВЛЕНИЯ Рассмотрим класс нелинейных систем управления канонической структуры, у которых u(t) ≡
- 100. Другой путь решения проблемы абсолютной устойчивости был предложен румынским математиком В. М. Поповым (1959). Им на
- 101. Система называется абсолютно устойчивой в секторе [k1, k2], если ее положение равновесия асимптотически устойчиво в целом
- 102. Частотный критерий абсолютной устойчивости является геометрической интерпретацией основной теоремы. Введем в рассмотрение, следуя Попову, помимо основной
- 103. Критерий Попова (линейный). Состояние равновесия нелинейной системы с асимптотически устойчивой линейной частью будет абсолютно устойчивым в
- 104. Предложенный В. М. Поповым более мощный круговой критерий, свободен от этих ограничений и, кроме того, он
- 105. Геометрически обобщенное условие Пoпова делит для каждого значения комплексную плоскость на две области: внутренность и внешность
- 142. Скачать презентацию

Анализ сводится к исследованию зависимости между сигналом, поданным на вход системы
Анализ сводится к исследованию зависимости между сигналом, поданным на вход системы


Принципы анализа систем управления
физичности
моделируемости
целенаправленности
Принципы анализа систем управления
физичности
моделируемости
целенаправленности
Принцип физичности: всякой системе (независимо от ее природы) присущи законы (закономерности), возможно,
Принцип физичности: всякой системе (независимо от ее природы) присущи законы (закономерности), возможно,
Постулат целостности. Сложная система управления должна рассматриваться как единое целое.
Постулат декомпозиции систем. Анализ
Постулат целостности. Сложная система управления должна рассматриваться как единое целое.
Постулат декомпозиции систем. Анализ
Принцип моделируемости: сложная система может быть представлена конечным множеством моделей, каждая из
Принцип моделируемости: сложная система может быть представлена конечным множеством моделей, каждая из
Постулат действий. Для изменения поведения системы требуется прирост воздействия, превосходящего некоторое пороговое
Постулат действий. Для изменения поведения системы требуется прирост воздействия, превосходящего некоторое пороговое
Постулат многообразия моделей. Определение характеристик системы на всех уровнях производится с помощью
Постулат многообразия моделей. Определение характеристик системы на всех уровнях производится с помощью
Постулат внешнего дополнения. Проверка истинности результатов, получаемых на каждом уровне, производится с
Постулат внешнего дополнения. Проверка истинности результатов, получаемых на каждом уровне, производится с
Целенаправленность системы - функциональная тенденция, направленная на достижение системой некоторого состояния либо на
Целенаправленность системы - функциональная тенденция, направленная на достижение системой некоторого состояния либо на
Постулат выбора. Сложная система обладает способностью к выбору поведения, и, следовательно, однозначно
Постулат выбора. Сложная система обладает способностью к выбору поведения, и, следовательно, однозначно
Познание и практическое использование этого постулата имеет два аспекта.
Первый - стимулирование
Познание и практическое использование этого постулата имеет два аспекта.
Первый - стимулирование

Виды анализа систем управления
структурный
функциональный
информационный
параметрический
Виды анализа систем управления
структурный
функциональный
информационный
параметрический

Структурный анализ систем управления
Структура - это внутренняя организация системы, которая способствует
Структурный анализ систем управления
Структура - это внутренняя организация системы, которая способствует
Сущностью структурного анализа является определение статических характеристик системы по ее структуре.
Структурный анализ
Сущностью структурного анализа является определение статических характеристик системы по ее структуре.
Структурный анализ
В качестве показателей исследуемых структур целесообразно использовать:
множество выделенных элементов, отношений и
В качестве показателей исследуемых структур целесообразно использовать:
множество выделенных элементов, отношений и
Процедура определения показателей структуры включает следующие этапы:
определение исходных данных для оценки
Процедура определения показателей структуры включает следующие этапы:
определение исходных данных для оценки

Функциональный анализ систем управления
Сущностью функционального анализа является определение динамических характеристик системы на
Функциональный анализ систем управления
Сущностью функционального анализа является определение динамических характеристик системы на
Основные этапы функционального анализа:
определение и описание общего процесса управления, реализуемого
Основные этапы функционального анализа:
определение и описание общего процесса управления, реализуемого
Информационный анализ систем управления
Объектом информационного анализа являются информационные процессы, протекающие в системе управления.
Информационный анализ систем управления
Объектом информационного анализа являются информационные процессы, протекающие в системе управления.
Коммуникационная (информационная) схема передачи информации в системе управления
Коммуникационная (информационная) схема передачи информации в системе управления
Классификация и характеристика информационных процессов
Классификация и характеристика информационных процессов
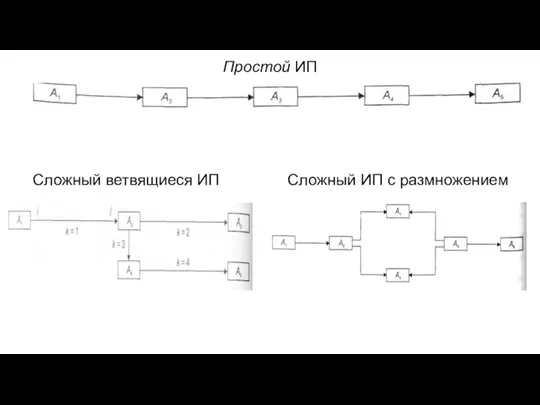
Простой ИП
Сложный ветвящиеся ИП
Сложный ИП с размножением
Простой ИП
Сложный ветвящиеся ИП
Сложный ИП с размножением
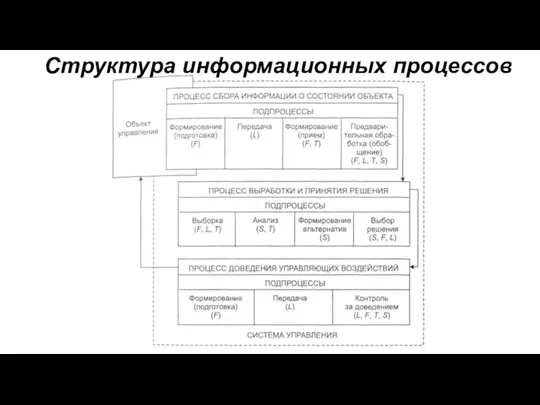
Структура информационных процессов
Структура информационных процессов
Процедура информационного анализа:
определение потребности в информации на каждой стадии управления;
планирование потребностей
Процедура информационного анализа:
определение потребности в информации на каждой стадии управления;
планирование потребностей
К показателям информации относятся:
объем и скорость передачи информации;
достоверность передаваемых сообщений;
направление информационных
К показателям информации относятся:
объем и скорость передачи информации;
достоверность передаваемых сообщений;
направление информационных
Параметрический анализ систем управления
Сущностью анализа является определение необходимой и достаточной совокупности показателей,
Параметрический анализ систем управления
Сущностью анализа является определение необходимой и достаточной совокупности показателей,
Анализ линейных непрерывных систем
Анализ линейных непрерывных систем
Система обладает свойством аддитивности, если сумма входов u3(t) = u1(t) +
Система обладает свойством аддитивности, если сумма входов u3(t) = u1(t) +
ДИНАМИЧЕСКИЕ МОДЕЛИ ОБЪЕКТОВ И СИСТЕМ УПРАВЛЕНИЯ
Динамические модели объектов и систем управления
ДИНАМИЧЕСКИЕ МОДЕЛИ ОБЪЕКТОВ И СИСТЕМ УПРАВЛЕНИЯ
Динамические модели объектов и систем управления

Для описания динамики непрерывного линейного объекта, имеющего вход u(t) и выход
Для описания динамики непрерывного линейного объекта, имеющего вход u(t) и выход
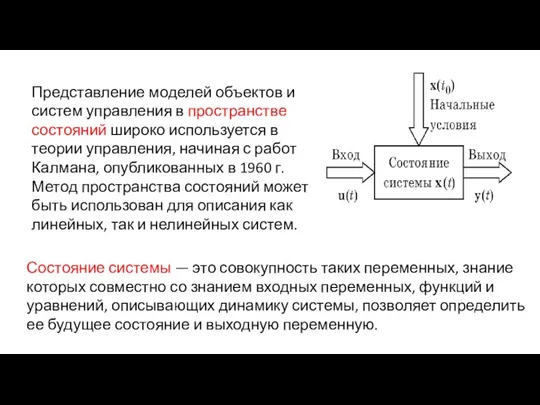
Представление моделей объектов и систем управления в пространстве состояний широко используется
Представление моделей объектов и систем управления в пространстве состояний широко используется
Устойчивость линейных систем
Необходимое и достаточное условие устойчивости линейной системы состоит в
Устойчивость линейных систем
Необходимое и достаточное условие устойчивости линейной системы состоит в

ИНВАРИАНТНОСТЬ, КОВАРИАНТНОСТЬ И ЧУВСТВИТЕЛЬНОСТЬ СИСТЕМ УПРАВЛЕНИЯ
Одна из важнейших задач системы управления
ИНВАРИАНТНОСТЬ, КОВАРИАНТНОСТЬ И ЧУВСТВИТЕЛЬНОСТЬ СИСТЕМ УПРАВЛЕНИЯ
Одна из важнейших задач системы управления
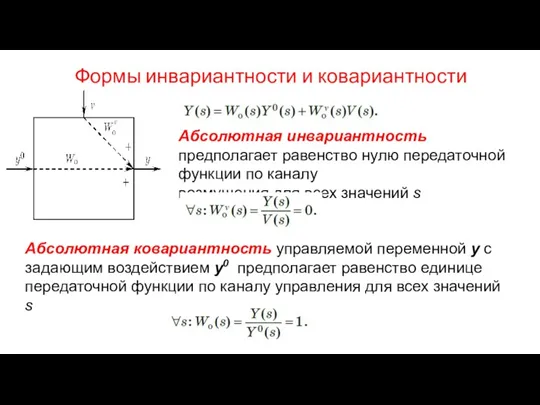
Формы инвариантности и ковариантности
Абсолютная инвариантность предполагает равенство нулю передаточной функции по
Формы инвариантности и ковариантности
Абсолютная инвариантность предполагает равенство нулю передаточной функции по
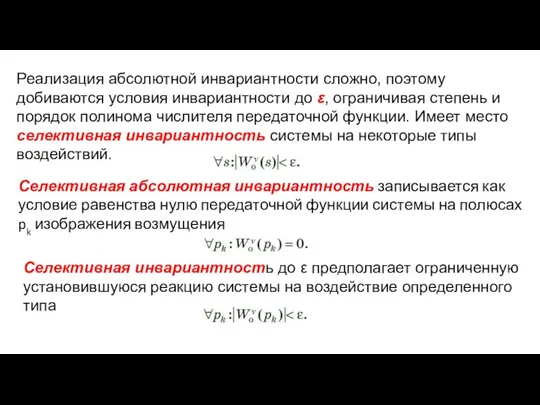
Реализация абсолютной инвариантности сложно, поэтому добиваются условия инвариантности до ε, ограничивая
Реализация абсолютной инвариантности сложно, поэтому добиваются условия инвариантности до ε, ограничивая
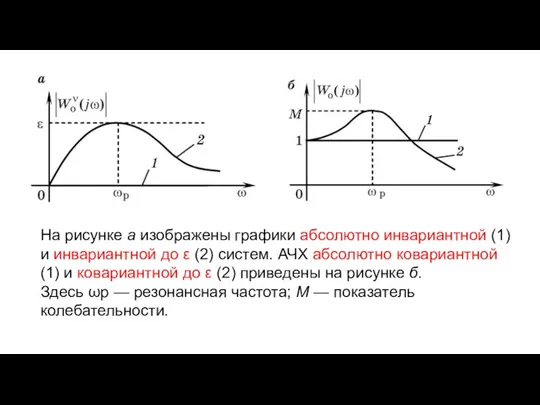
На рисунке а изображены графики абсолютно инвариантной (1) и инвариантной до
На рисунке а изображены графики абсолютно инвариантной (1) и инвариантной до
Инвариантность систем с типовой структурой
Различают три основных вида инвариантности: последовательную и
Инвариантность систем с типовой структурой
Различают три основных вида инвариантности: последовательную и
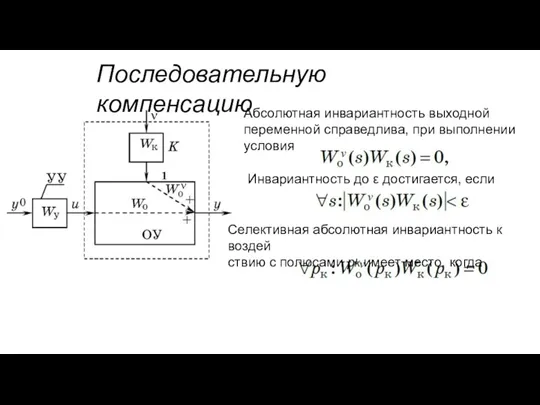
Абсолютная инвариантность выходной переменной справедлива, при выполнении условия
Инвариантность до ε достигается,
Абсолютная инвариантность выходной переменной справедлива, при выполнении условия
Инвариантность до ε достигается,

Абсолютная инвариантность выхода объекта y к возмущению v достигается при выполнении
Абсолютная инвариантность выхода объекта y к возмущению v достигается при выполнении
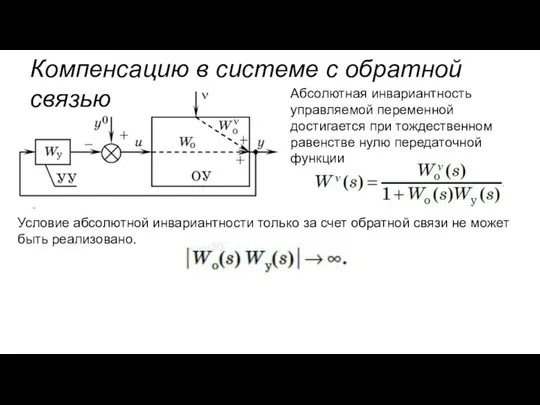
Компенсацию в системе с обратной связью
Условие абсолютной инвариантности только за счет
Компенсацию в системе с обратной связью
Условие абсолютной инвариантности только за счет
Чувствительность систем управления
Помимо воздействия среды, на систему оказывает влияние изменение параметров
Чувствительность систем управления
Помимо воздействия среды, на систему оказывает влияние изменение параметров

Абсолютная чувствительность передаточной функции системы Φ(s) к вариации передаточной функции звена
Абсолютная чувствительность передаточной функции системы Φ(s) к вариации передаточной функции звена
АНАЛИЗ КАЧЕСТВА СИСТЕМ УПРАВЛЕНИЯ ДВИЖЕНИЕМ
Прямые показатели качества определяются непосредственно из переходного
АНАЛИЗ КАЧЕСТВА СИСТЕМ УПРАВЛЕНИЯ ДВИЖЕНИЕМ
Прямые показатели качества определяются непосредственно из переходного
К прямым показателям качества, получаемым на основании графика переходного процесса, относятся:
К прямым показателям качества, получаемым на основании графика переходного процесса, относятся:
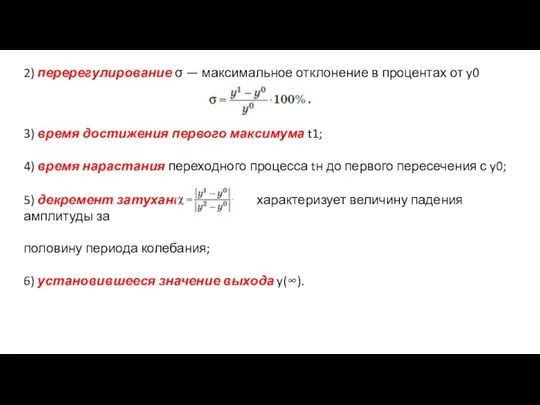
3) время достижения первого максимума t1;
4) время нарастания переходного процесса tн
4) время нарастания переходного процесса tн
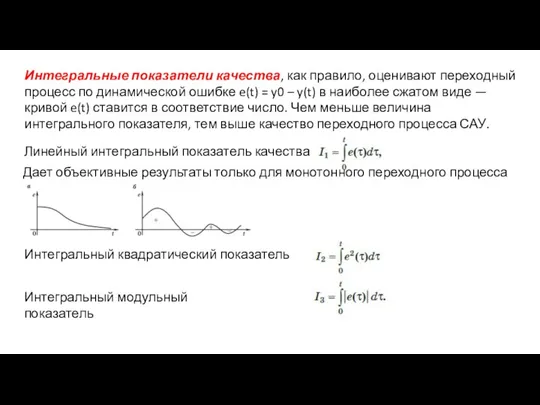
Интегральные показатели качества, как правило, оценивают переходный процесс по динамической ошибке
Интегральные показатели качества, как правило, оценивают переходный процесс по динамической ошибке

Косвенные показатели качества
Запас устойчивости по модулю
Запас устойчивости по фазе
Показатель колебательности —
Косвенные показатели качества
Запас устойчивости по модулю
Запас устойчивости по фазе
Показатель колебательности —
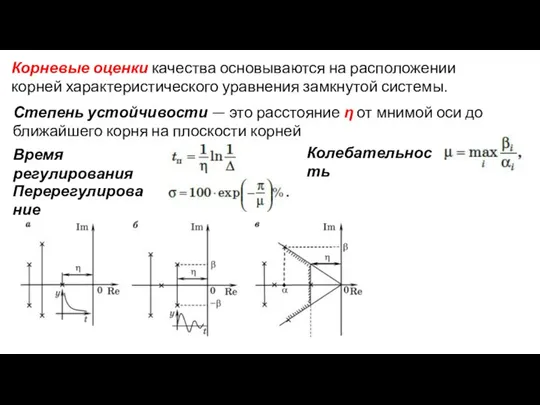
Корневые оценки качества основываются на расположении корней характеристического уравнения замкнутой системы.
Степень
Корневые оценки качества основываются на расположении корней характеристического уравнения замкнутой системы.
Степень
МЕТОД КОРНЕВОГО ГОДОГРАФА
Качество переходного процесса системы управления зависит от положения корней
МЕТОД КОРНЕВОГО ГОДОГРАФА
Качество переходного процесса системы управления зависит от положения корней




Все реальные системы управления — нелинейные!
Линейные модели систем являются идеализациями
Все реальные системы управления — нелинейные!
Линейные модели систем являются идеализациями
Математической моделью движения управляемой нелинейной системы
u = (u1, . . ,
Математической моделью движения управляемой нелинейной системы
u = (u1, . . ,

Внешняя математическая модель или модель типа вход-выход нелинейной автоматической системы представляется
Внешняя математическая модель или модель типа вход-выход нелинейной автоматической системы представляется

Характеристики «вход-выход» основных нелинейных элементов:
а — идеального реле;
б —
Характеристики «вход-выход» основных нелинейных элементов:
а — идеального реле;
б —
ТОПОЛОГИЧЕСКИЕ МЕТОДЫ АНАЛИЗА НЕЛИНЕЙНЫХ СИСТЕМ
Топологические методы анализа являются не только качественными,
ТОПОЛОГИЧЕСКИЕ МЕТОДЫ АНАЛИЗА НЕЛИНЕЙНЫХ СИСТЕМ
Топологические методы анализа являются не только качественными,
Интегральная кривая x(t) — это график решения системы. В каждой точке
Интегральная кривая x(t) — это график решения системы. В каждой точке
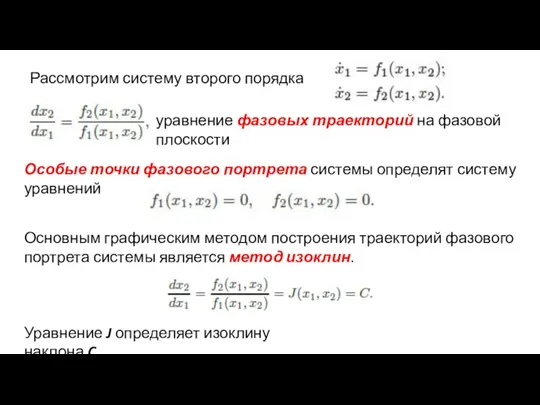
Рассмотрим систему второго порядка
уравнение фазовых траекторий на фазовой плоскости
Особые точки фазового
Рассмотрим систему второго порядка
уравнение фазовых траекторий на фазовой плоскости
Особые точки фазового
• Характеристические числа λ1, λ2 — действительные, одного знака и различные.
• Характеристические числа λ1, λ2 — действительные, одного знака и различные.
• Характеристические числа λ1, λ2 - действительные, разных знаков.
Локальный портрет в
• Характеристические числа λ1, λ2 - действительные, разных знаков.
Локальный портрет в
Среди характеристических чисел есть равные нулю. Локальный портрет в особой точке
Среди характеристических чисел есть равные нулю. Локальный портрет в особой точке
ЛИНЕЙНЫЕ ПРЕДСТАВЛЕНИЯ
НЕЛИНЕЙНОЙ МОДЕЛИ
Линеаризация как представление модели нелинейной системы в линейном
ЛИНЕЙНЫЕ ПРЕДСТАВЛЕНИЯ
НЕЛИНЕЙНОЙ МОДЕЛИ
Линеаризация как представление модели нелинейной системы в линейном
Касательная линеаризация осуществляется в предположении, что движение нелинейной системы происходит в
Касательная линеаризация осуществляется в предположении, что движение нелинейной системы происходит в
Гармоническая линеаризация осуществляется не во временной области, а в частотной, для
Гармоническая линеаризация осуществляется не во временной области, а в частотной, для
Стохастическая линеаризация осуществляется во временной области для систем, испытывающих случайные возмущения.
Стохастическая линеаризация осуществляется во временной области для систем, испытывающих случайные возмущения.

Метод гармонической линеаризации
(Н. М. Крылов, Н. Н. Боголюбов, 1934), основывается
Метод гармонической линеаризации
(Н. М. Крылов, Н. Н. Боголюбов, 1934), основывается
Пусть входной сигнал нелинейного элемента системы является гармоническим ε(t) = Asin(ωt),
Пусть входной сигнал нелинейного элемента системы является гармоническим ε(t) = Asin(ωt),

Обозначив
получим
Выходной сигнал нелинейного элемента оказывается почти гармоническим. Нелинейный элемент ведет себя
Обозначив
получим
Выходной сигнал нелинейного элемента оказывается почти гармоническим. Нелинейный элемент ведет себя
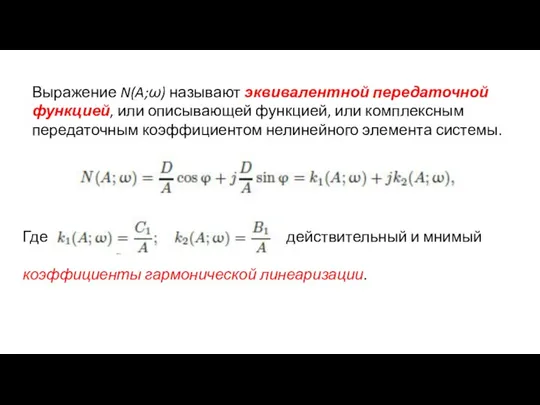
Выражение N(A;ω) называют эквивалентной передаточной функцией, или описывающей функцией, или комплексным
Выражение N(A;ω) называют эквивалентной передаточной функцией, или описывающей функцией, или комплексным

Описывающая функция N(A;ω) является комплексной функцией амплитуды гармонического входного воздействия, при
Описывающая функция N(A;ω) является комплексной функцией амплитуды гармонического входного воздействия, при

Коэффициенты гармонической линеаризации находят из выражений:
Заметим, что для однозначных характеристик нелинейных
Коэффициенты гармонической линеаризации находят из выражений:
Заметим, что для однозначных характеристик нелинейных
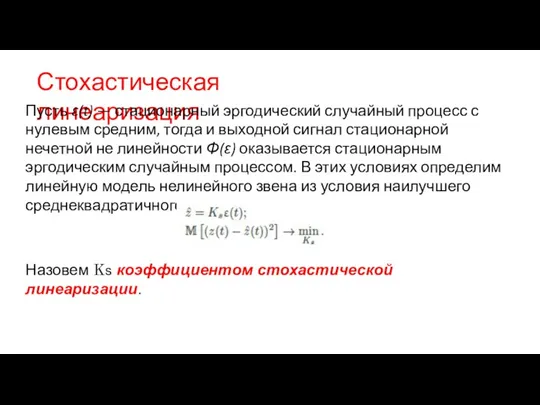
Стохастическая линеаризация
Пусть ε(t) — стационарный эргодический случайный процесс с нулевым средним,
Стохастическая линеаризация
Пусть ε(t) — стационарный эргодический случайный процесс с нулевым средним,

Стационарный случайный процесс называется эргодическим, если любая его вероятностная характеристика, полученная
Стационарный случайный процесс называется эргодическим, если любая его вероятностная характеристика, полученная
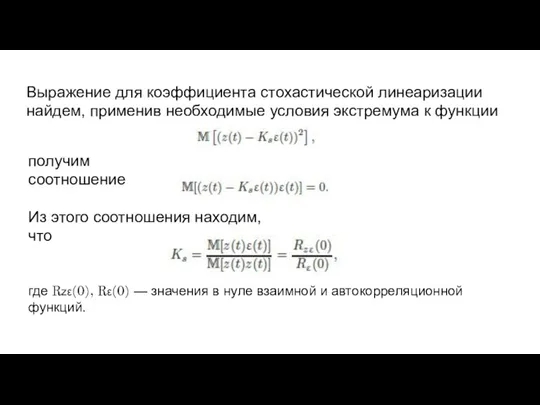
Выражение для коэффициента стохастической линеаризации найдем, применив необходимые условия экстремума к
Выражение для коэффициента стохастической линеаризации найдем, применив необходимые условия экстремума к

Пусть входной случайный процесс — шум с плотностью f(ε), нулевым средним
Пусть входной случайный процесс — шум с плотностью f(ε), нулевым средним
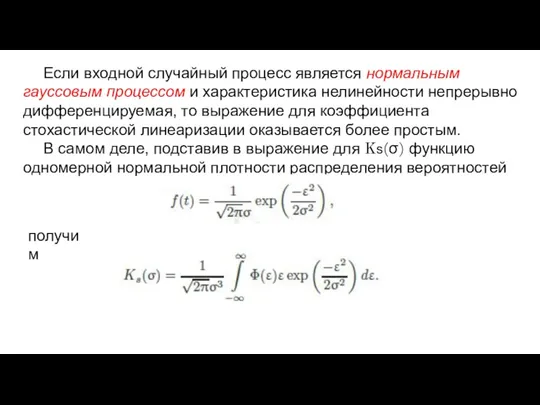
Если входной случайный процесс является нормальным гауссовым процессом и характеристика нелинейности
Если входной случайный процесс является нормальным гауссовым процессом и характеристика нелинейности
Теперь, выполнив преобразования под интегралом и учитывая нечетность характеристики нелинейности, получим
После
Теперь, выполнив преобразования под интегралом и учитывая нечетность характеристики нелинейности, получим
После
АНАЛИЗ УСТОЙЧИВОСТИ НЕЛИНЕЙНЫХ СИСТЕМ
УСТОЙЧИВОСТЬ ДВИЖЕНИЙ
НЕЛИНЕЙНОЙ СИСТЕМЫ В МАЛОМ
Движения нелинейных систем гораздо
АНАЛИЗ УСТОЙЧИВОСТИ НЕЛИНЕЙНЫХ СИСТЕМ
УСТОЙЧИВОСТЬ ДВИЖЕНИЙ
НЕЛИНЕЙНОЙ СИСТЕМЫ В МАЛОМ
Движения нелинейных систем гораздо
Понятия устойчивости и асимптотической устойчивости по Ляпунову позволяют анализировать движения системы
Понятия устойчивости и асимптотической устойчивости по Ляпунову позволяют анализировать движения системы

Рассмотрим автономную нелинейную систему и ее точку покоя x∗. Пусть x(t)
Рассмотрим автономную нелинейную систему и ее точку покоя x∗. Пусть x(t)
Теорема (А. М. Ляпунов, 1892). Если вещественные части всех собственных чисел
Теорема (А. М. Ляпунов, 1892). Если вещественные части всех собственных чисел
Пример
Исследовать устойчивость в малом особых точек системы первого порядка
Система
Пример
Исследовать устойчивость в малом особых точек системы первого порядка
Система

АНАЛИЗ УСТОЙЧИВОСТИ НЕЛИНЕЙНОЙ СИСТЕМЫ
В БОЛЬШОМ И В ЦЕЛОМ
Положение равновесия x∗ системы
АНАЛИЗ УСТОЙЧИВОСТИ НЕЛИНЕЙНОЙ СИСТЕМЫ
В БОЛЬШОМ И В ЦЕЛОМ
Положение равновесия x∗ системы
Фундаментальным методом исследования устойчивости движения является второй метод Ляпунова, основное достоинство
Фундаментальным методом исследования устойчивости движения является второй метод Ляпунова, основное достоинство
Скалярную функцию векторного аргумента V(x) непрерывную
вместе со своими первыми частными производными
Скалярную функцию векторного аргумента V(x) непрерывную
вместе со своими первыми частными производными
Теоремы (А. М. Ляпунов, 1892)
1. Об устойчивости в большом. Если в
Теоремы (А. М. Ляпунов, 1892)
1. Об устойчивости в большом. Если в
АБСОЛЮТНАЯ УСТОЙЧИВОСТЬ НЕЛИНЕЙНЫХ
СИСТЕМ УПРАВЛЕНИЯ
Рассмотрим класс нелинейных систем управления канонической структуры, у
АБСОЛЮТНАЯ УСТОЙЧИВОСТЬ НЕЛИНЕЙНЫХ
СИСТЕМ УПРАВЛЕНИЯ
Рассмотрим класс нелинейных систем управления канонической структуры, у
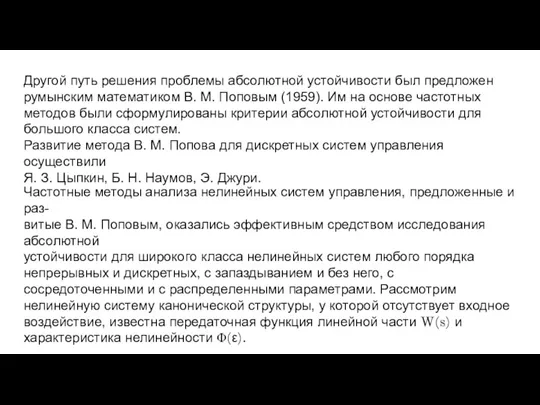
Другой путь решения проблемы абсолютной устойчивости был предложен румынским математиком В.
Другой путь решения проблемы абсолютной устойчивости был предложен румынским математиком В.
![Система называется абсолютно устойчивой в секторе [k1, k2], если ее](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/289829/slide-100.jpg)
Система называется абсолютно устойчивой в секторе [k1, k2], если ее положение
Система называется абсолютно устойчивой в секторе [k1, k2], если ее положение

Частотный критерий абсолютной устойчивости является геометрической интерпретацией основной теоремы.
Введем в рассмотрение,
Частотный критерий абсолютной устойчивости является геометрической интерпретацией основной теоремы.
Введем в рассмотрение,

Критерий Попова (линейный). Состояние равновесия нелинейной системы с асимптотически устойчивой линейной
Критерий Попова (линейный). Состояние равновесия нелинейной системы с асимптотически устойчивой линейной

Предложенный В. М. Поповым более мощный круговой критерий, свободен от
этих ограничений
Предложенный В. М. Поповым более мощный круговой критерий, свободен от
этих ограничений

Геометрически обобщенное условие Пoпова делит для каждого значения комплексную плоскость на
Геометрически обобщенное условие Пoпова делит для каждого значения комплексную плоскость на



































 Компьютер и его части
Компьютер и его части HTTP протокол передачи гипертекста
HTTP протокол передачи гипертекста Правила по обеспечению информационной безопасности на рабочем месте
Правила по обеспечению информационной безопасности на рабочем месте ABC-Pascal. Структура программы. Переменные и присваивание. Ввод-вывод
ABC-Pascal. Структура программы. Переменные и присваивание. Ввод-вывод Электронная подпись: теория и практика использования. Тема 1.3.2
Электронная подпись: теория и практика использования. Тема 1.3.2 Проектирование АСУ ТП . Принципы проектирования
Проектирование АСУ ТП . Принципы проектирования Методическая разработка урока по теме Компьютерные вирусы. Антивирусные программы
Методическая разработка урока по теме Компьютерные вирусы. Антивирусные программы Методы научного моделирования
Методы научного моделирования Оборудование для наших клиентов
Оборудование для наших клиентов Урок по информатике в 5 классе по теме Кодирование информации
Урок по информатике в 5 классе по теме Кодирование информации Электронная тетрадь по информатике
Электронная тетрадь по информатике Текстові і графічні обʼєкти на слайдах. Урок 30
Текстові і графічні обʼєкти на слайдах. Урок 30 Модели данных. Примеры МИС. Стандарты. Шкалы измерения параметров. Этапы проектирования БД
Модели данных. Примеры МИС. Стандарты. Шкалы измерения параметров. Этапы проектирования БД Особенности объектной модели Java. (Лекция 5)
Особенности объектной модели Java. (Лекция 5) Training Module Overview
Training Module Overview ЗАДАНИЯ для интер доски к уроку ОБЪЕКТ
ЗАДАНИЯ для интер доски к уроку ОБЪЕКТ Системи програмного та слідкуючого керування рухом
Системи програмного та слідкуючого керування рухом Основы Java. Язык и платформа
Основы Java. Язык и платформа Машнное обучение. Практический пример. Подготовка данных. Применение алгоритмов ML
Машнное обучение. Практический пример. Подготовка данных. Применение алгоритмов ML Презентация из опыта работы Компьютерные игры для детей дошкольного возраста
Презентация из опыта работы Компьютерные игры для детей дошкольного возраста Устройства ввода и вывода информации
Устройства ввода и вывода информации Контент. Контент-план
Контент. Контент-план Моделирование сетей в ГИС. Примеры поиска оптимальных маршрутов
Моделирование сетей в ГИС. Примеры поиска оптимальных маршрутов Интернет желілері
Интернет желілері Основы поисковой оптимизации (теория и практика)
Основы поисковой оптимизации (теория и практика) История журналистики
История журналистики Introduction to database management systems
Introduction to database management systems Pascal.Тип данных - записи.
Pascal.Тип данных - записи.