- Базовая линия. Повороты. Дополнения

Содержание
- 2. Блок схема – графическое изображение Условные обозначения: Использование алгоритмических структур. Данные (ввод-вывод) Логический блок (блок условия)
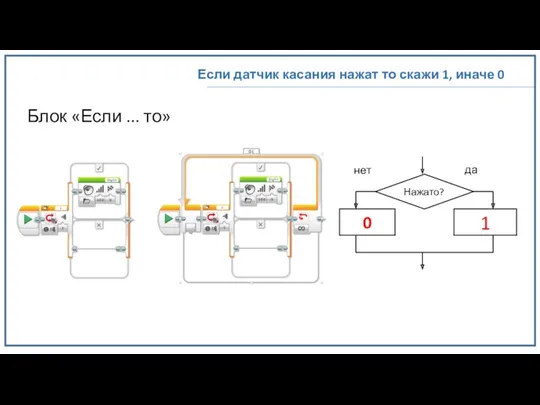
- 3. да нет Если датчик касания нажат то скажи 1, иначе 0 Блок «Если ... то»
- 4. Работа с переменными Переменная – это место в памяти модуля EV3, в котором может храниться значение
- 6. Определение серого
- 7. Создание блока начальных установок Параметры, которые надо редактировать
- 8. Создание блока начальных установок Добавляем параметры Имя блока Имя параметра
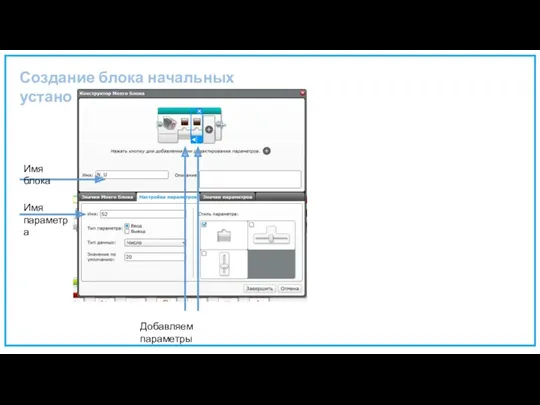
- 9. Создание блока начальных установок Добавляем параметры Имя блока Имя параметра
- 10. Создание блока начальных установок Подсоединение выводов Вид блока N_U
- 11. Вид блока N_U в программе
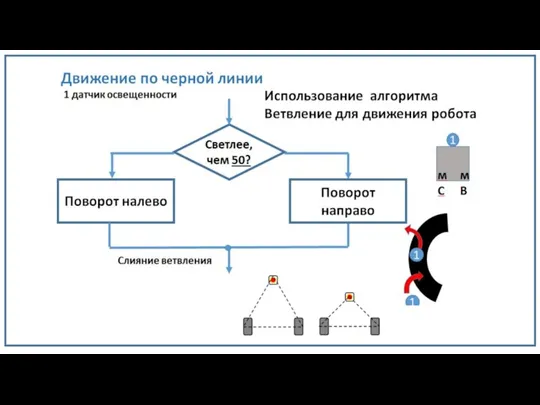
- 12. Движение по черной линии 2 датчика освещенности 2 мС мВ Черная линия должна находиться между датчиками
- 14. Создание программного кода движения по линии Берем структуру цикл, добавляем ветвления /копирование/
- 15. Создание программного кода движения по линии Добавляем переменные/
- 16. Создание программного кода движения по линии Пишем команды моторам/ Прерывание цикла
- 17. Создание блока движения по черной линии
- 18. Движение по черной линии- Траектория 3 Задание: Выполните в тетради. Начерчена ч. линия. Расставлено относительно неё
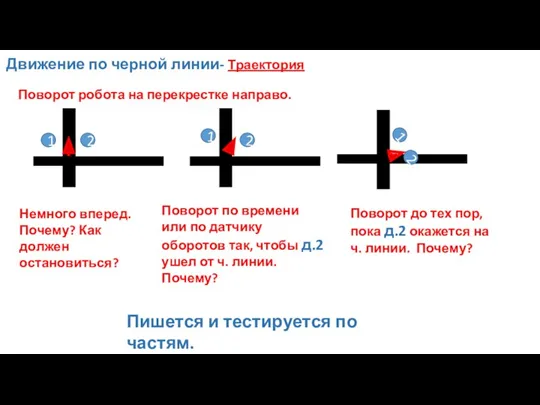
- 20. Движение по черной линии- Траектория Поворот робота на перекрестке направо. Пишется и тестируется по частям. Немного
- 21. Создание программного кода / поворот направо Вперед, до расположения колес на линии Поворот на небольшой угол
- 22. Создание блока / поворот налево Временная задержка -параметр Проезд вперед-параметр
- 23. Создание блока / поворот направо Временная задержка -параметр Нет параметра проезда вперед_ сделать !
- 24. Вид программы- траектория
- 25. Движение по белой линии- Траектория (ИНВЕРСИЯ) 2 Задание: Выполните в тетради. Начерчена ч. линия. Расставлено относительно
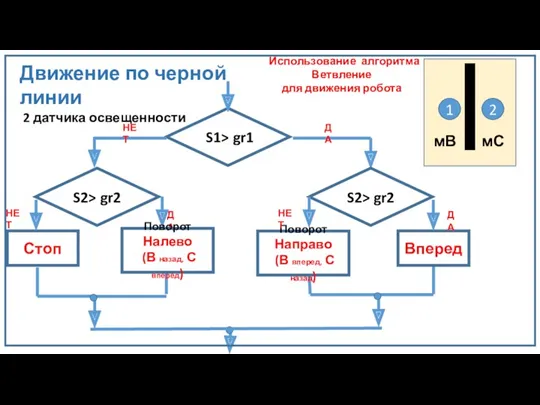
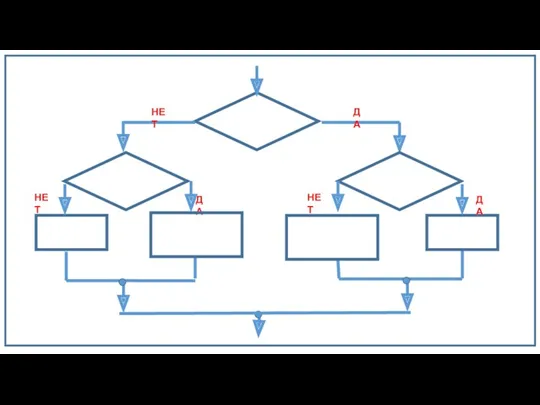
- 26. Задание: проезд по инверсной линии S1> gr1 S2> gr2 S2> gr2 ДА ДА ДА НЕТ НЕТ
- 27. Алгоритм выполнения разворота на 1800 Небольшой разворот, пока д. 2 точно будет находиться не на черной
- 28. Задание. В начале движения по коду задается направление проезда перекрестков. Затем робот движется по траектории в
- 29. Задание. В начале движения по коду задается направление проезда перекрестков. Затем робот движется по траектории в
- 30. Задание. В начале движения по коду задается направление проезда перекрестков. Затем робот движется по траектории в
- 31. Ветвление для распознавания кода (вывод слов направо, налево, вперед)
- 32. Алгоритм движения по коду. Нач. установки. Считать код, записать в 3 переменные (Povorot1, Povorot2, Povorot3) Доехать
- 33. Алгоритм записи в массив Нач. установки создание массива и переменных (M_POVOROT, In_Pov, Y) Считать код, записать
- 34. Программный код записи в массив Нач. установки создание массива и переменных (M_POVOROT, In_Pov, Y) Считать код,
- 35. Программный код записи в массив, длина которого не определена Нач. установки создание массива и переменных (M_POV,
- 36. Расположение элемента массива для доступа. Определение индекса последнего элемента Режим ДЛИНА Длина массива – количество элементов
- 37. Движение до перекрестка, считывание кода, поворот
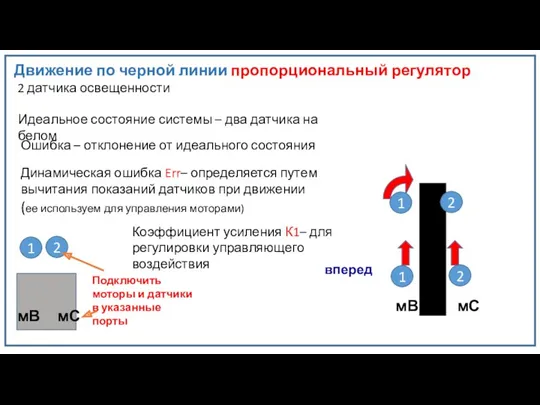
- 38. Движение по черной линии пропорциональный регулятор 2 датчика освещенности 2 мС мВ Идеальное состояние системы –
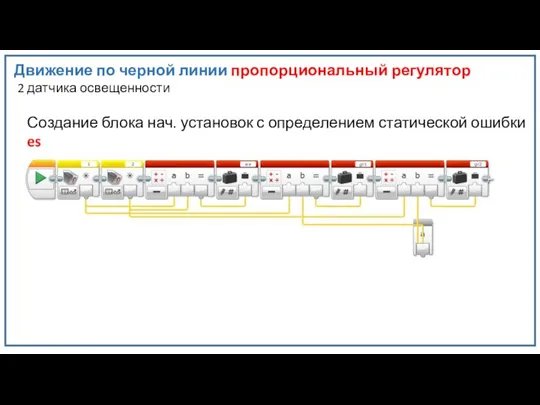
- 39. Движение по черной линии пропорциональный регулятор 2 датчика освещенности Создание блока нач. установок с определением статической
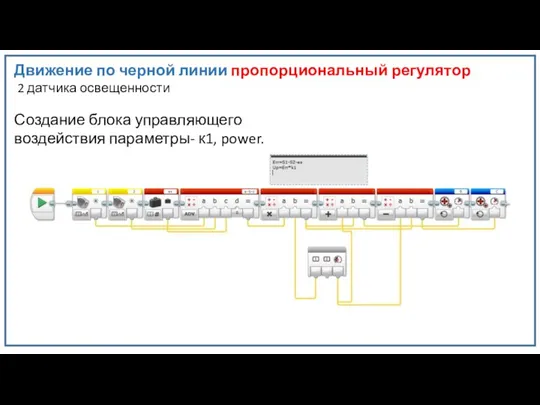
- 40. Движение по черной линии пропорциональный регулятор 2 датчика освещенности Создание блока управляющего воздействия параметры- к1, power.
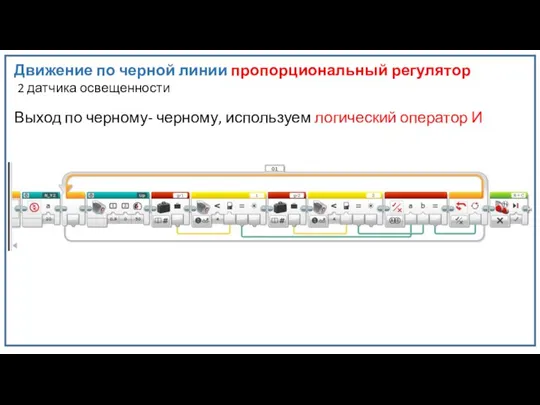
- 41. Движение по черной линии пропорциональный регулятор 2 датчика освещенности Выход по черному- черному, используем логический оператор
- 42. Движение по черной линии пропорциональный регулятор 2 датчика освещенности Выход по черному- черному, используем логический оператор
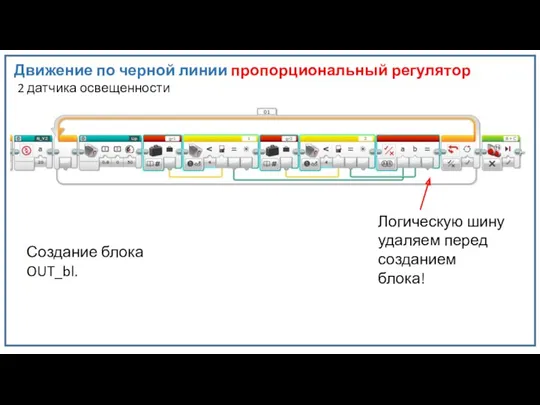
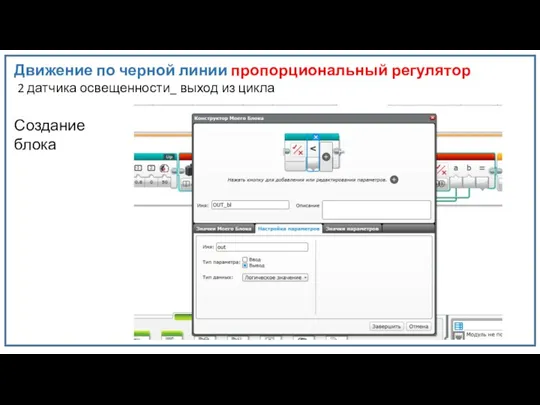
- 43. Движение по черной линии пропорциональный регулятор 2 датчика освещенности_ выход из цикла Создание блока
- 44. Движение по черной линии пропорциональный регулятор 2 датчика освещенности_ выход из цикла Создание блока
- 45. Движение по черной линии пропорциональный регулятор 2 датчика освещенности_ выход из цикла Результат Надо создать еще
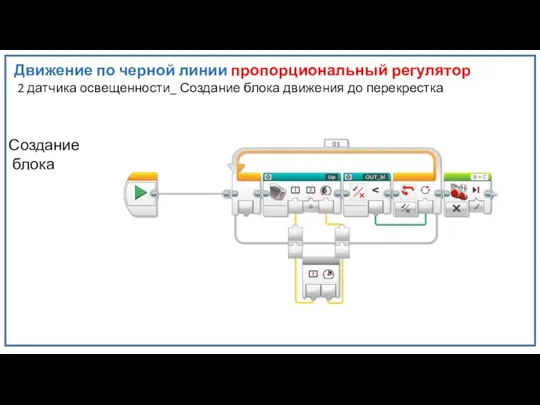
- 46. Движение по черной линии пропорциональный регулятор 2 датчика освещенности_ Создание блока движения до перекрестка Создание блока
- 47. Движение по черной линии пропорциональный регулятор 2 датчика освещенности_ Создание блока движения до перекрестка Создание блока
- 49. Скачать презентацию
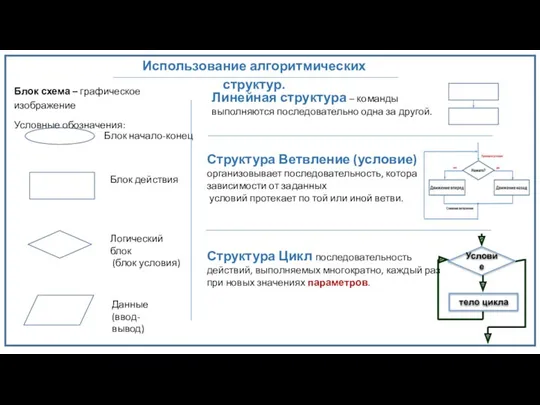
Блок схема – графическое изображение
Условные обозначения:
Использование алгоритмических структур.
Данные
(ввод-вывод)
Логический блок
(блок условия)
Блок
Блок схема – графическое изображение
Условные обозначения:
Использование алгоритмических структур.
Данные
(ввод-вывод)
Логический блок
(блок условия)
Блок
да
нет
Если датчик касания нажат то скажи 1, иначе 0
Блок «Если
да
нет
Если датчик касания нажат то скажи 1, иначе 0
Блок «Если
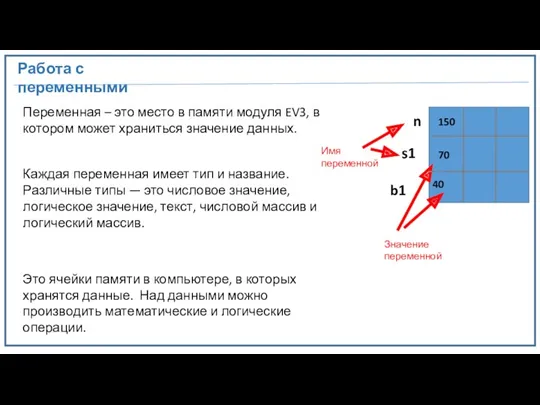
Работа с переменными
Переменная – это место в памяти модуля EV3, в котором
Работа с переменными
Переменная – это место в памяти модуля EV3, в котором

Определение серого
Определение серого
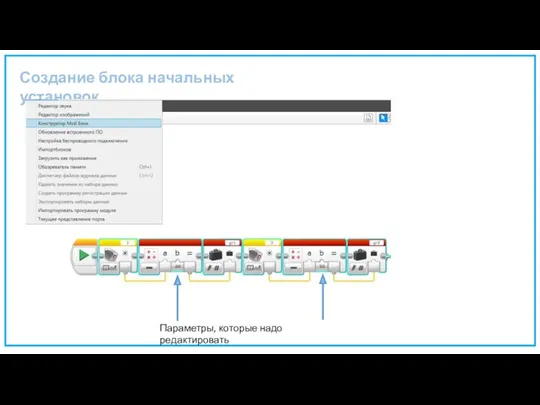
Создание блока начальных установок
Параметры, которые надо редактировать
Создание блока начальных установок
Параметры, которые надо редактировать
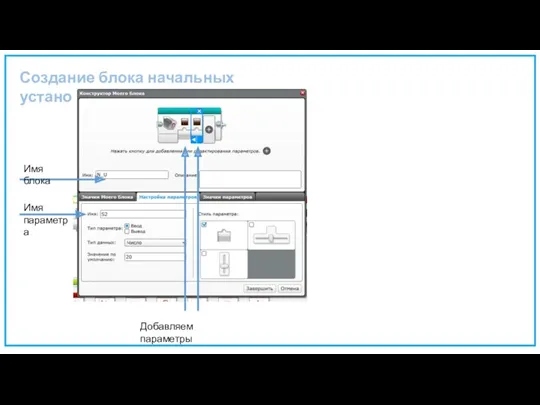
Создание блока начальных установок
Добавляем параметры
Имя блока
Имя параметра
Создание блока начальных установок
Добавляем параметры
Имя блока
Имя параметра
Создание блока начальных установок
Добавляем параметры
Имя блока
Имя параметра
Создание блока начальных установок
Добавляем параметры
Имя блока
Имя параметра
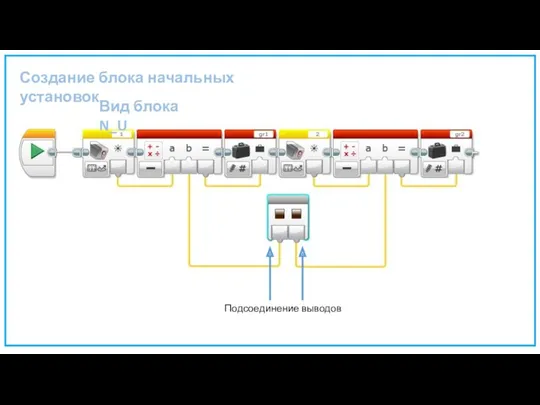
Создание блока начальных установок
Подсоединение выводов
Вид блока N_U
Создание блока начальных установок
Подсоединение выводов
Вид блока N_U

Вид блока N_U в программе
Вид блока N_U в программе
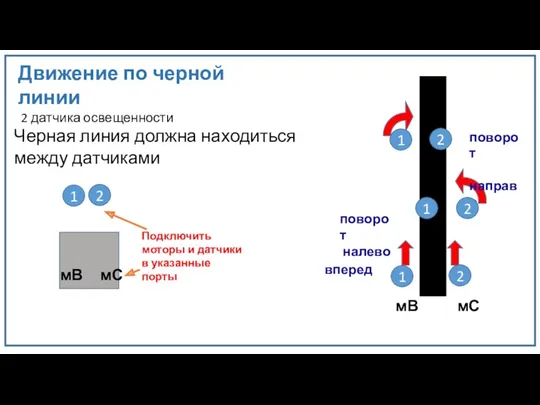
Движение по черной линии
2 датчика освещенности
2
мС
мВ
Черная линия должна находиться между
Движение по черной линии
2 датчика освещенности
2
мС
мВ
Черная линия должна находиться между

Создание программного кода движения по линии
Берем структуру цикл,
добавляем ветвления /копирование/
Создание программного кода движения по линии
Берем структуру цикл,
добавляем ветвления /копирование/

Создание программного кода движения по линии
Добавляем переменные/
Создание программного кода движения по линии
Добавляем переменные/
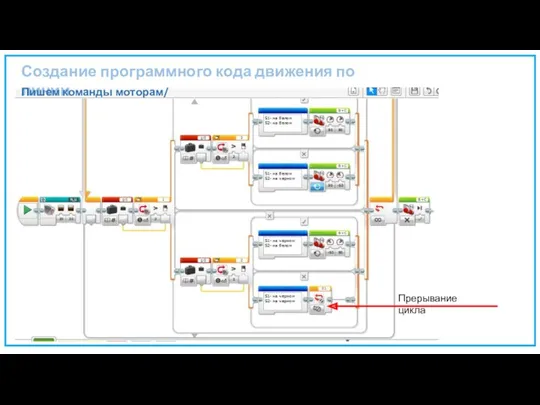
Создание программного кода движения по линии
Пишем команды моторам/
Прерывание цикла
Создание программного кода движения по линии
Пишем команды моторам/
Прерывание цикла
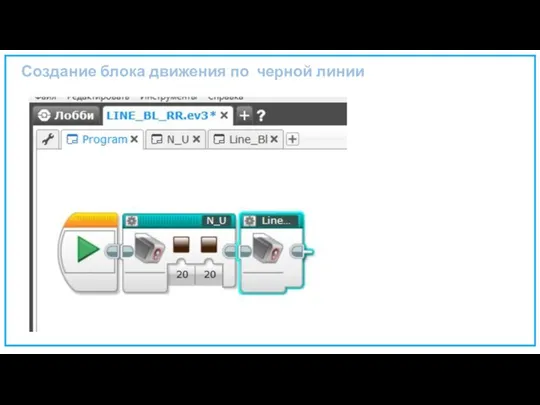
Создание блока движения по черной линии
Создание блока движения по черной линии

Движение по черной линии- Траектория
3
Задание: Выполните в тетради.
Начерчена ч. линия. Расставлено
Движение по черной линии- Траектория
3
Задание: Выполните в тетради.
Начерчена ч. линия. Расставлено
Движение по черной линии- Траектория
Поворот робота на перекрестке направо.
Пишется и
Движение по черной линии- Траектория
Поворот робота на перекрестке направо.
Пишется и

Создание программного кода / поворот направо
Вперед, до расположения колес на линии
Поворот
Создание программного кода / поворот направо
Вперед, до расположения колес на линии
Поворот
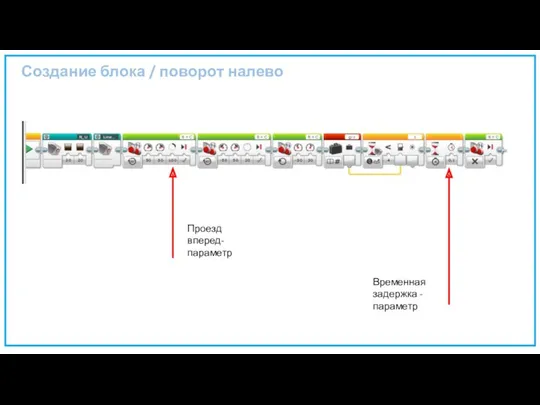
Создание блока / поворот налево
Временная задержка -параметр
Проезд вперед-параметр
Создание блока / поворот налево
Временная задержка -параметр
Проезд вперед-параметр
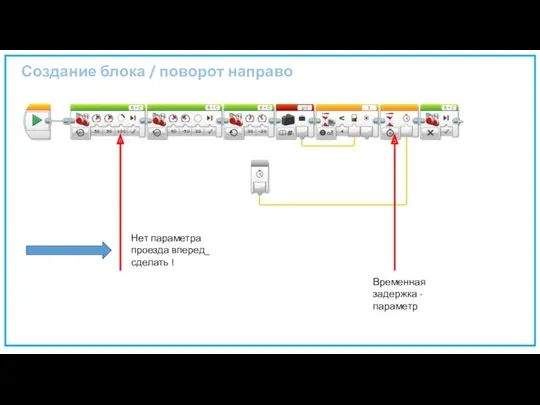
Создание блока / поворот направо
Временная задержка -параметр
Нет параметра проезда вперед_
Создание блока / поворот направо
Временная задержка -параметр
Нет параметра проезда вперед_
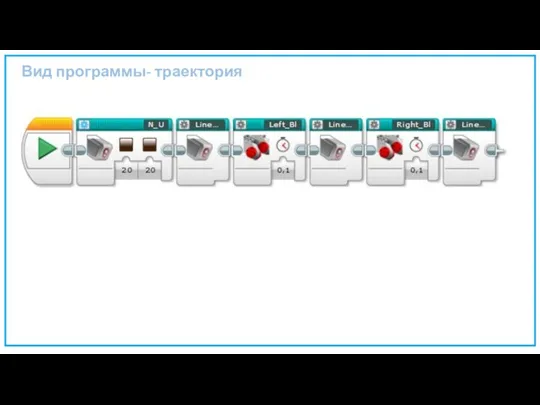
Вид программы- траектория
Вид программы- траектория
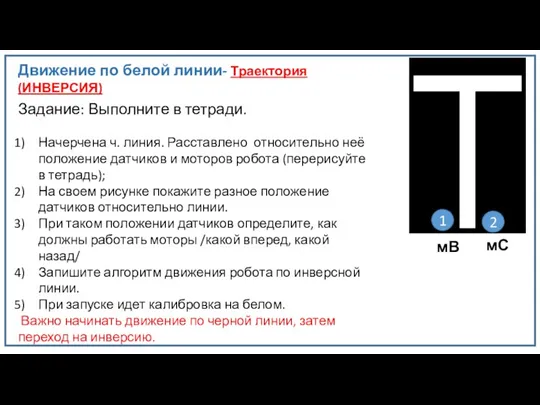
Движение по белой линии- Траектория (ИНВЕРСИЯ)
2
Задание: Выполните в тетради.
Начерчена ч. линия.
Движение по белой линии- Траектория (ИНВЕРСИЯ)
2
Задание: Выполните в тетради.
Начерчена ч. линия.
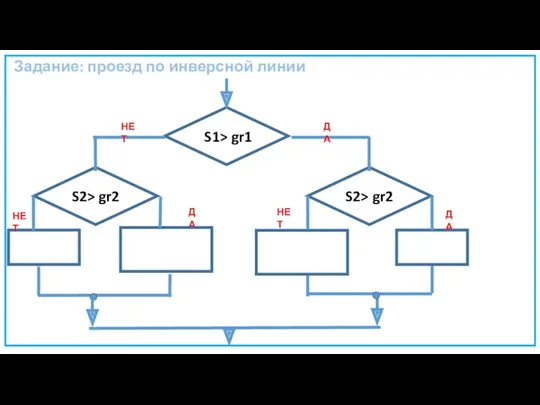
Задание: проезд по инверсной линии
S1> gr1
S2> gr2
S2> gr2
ДА
ДА
ДА
НЕТ
НЕТ
НЕТ
Задание: проезд по инверсной линии
S1> gr1
S2> gr2
S2> gr2
ДА
ДА
ДА
НЕТ
НЕТ
НЕТ
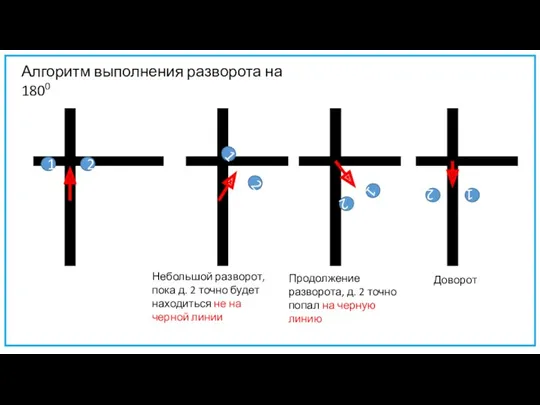
Алгоритм выполнения разворота на 1800
Небольшой разворот, пока д. 2 точно будет
Алгоритм выполнения разворота на 1800
Небольшой разворот, пока д. 2 точно будет
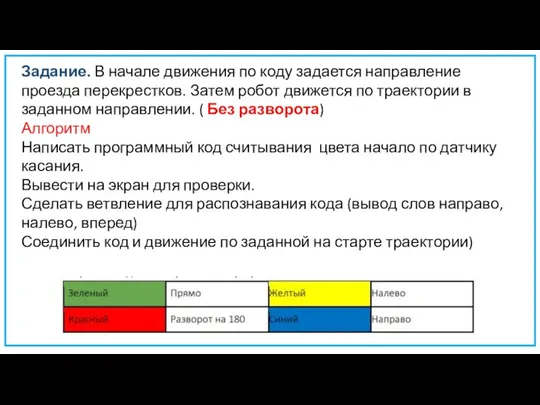
Задание. В начале движения по коду задается направление проезда перекрестков. Затем
Задание. В начале движения по коду задается направление проезда перекрестков. Затем
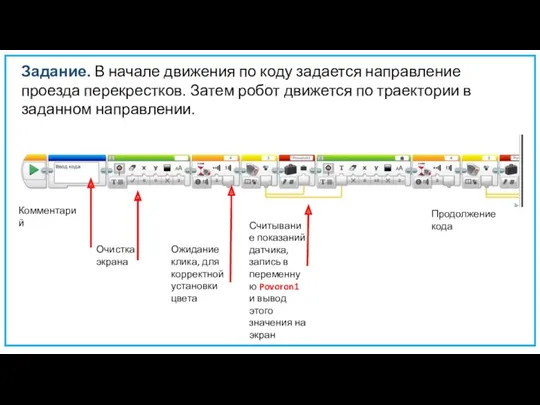
Задание. В начале движения по коду задается направление проезда перекрестков. Затем
Задание. В начале движения по коду задается направление проезда перекрестков. Затем
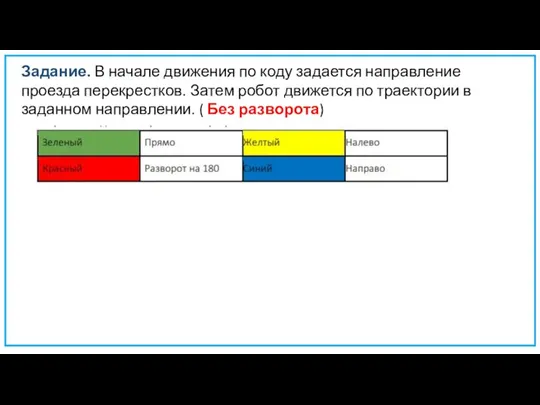
Задание. В начале движения по коду задается направление проезда перекрестков. Затем
Задание. В начале движения по коду задается направление проезда перекрестков. Затем
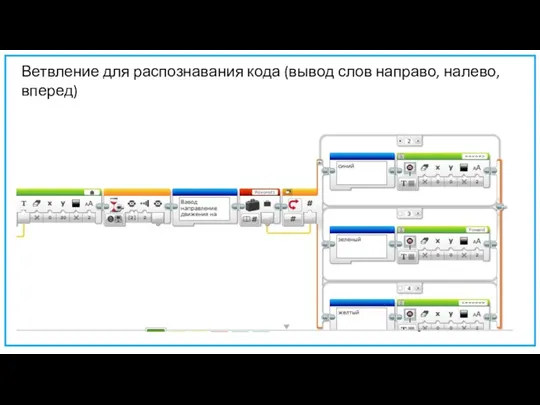
Ветвление для распознавания кода (вывод слов направо, налево, вперед)
Ветвление для распознавания кода (вывод слов направо, налево, вперед)
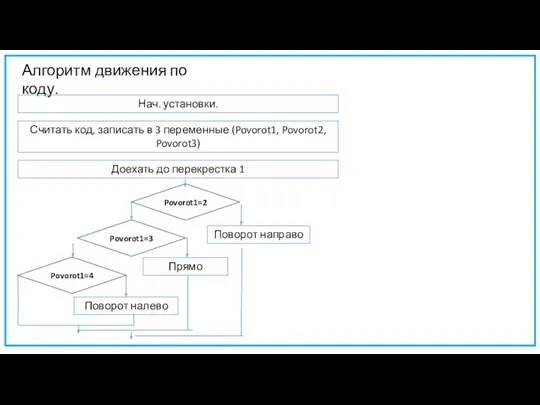
Алгоритм движения по коду.
Нач. установки.
Считать код, записать в 3 переменные (Povorot1,
Алгоритм движения по коду.
Нач. установки.
Считать код, записать в 3 переменные (Povorot1,
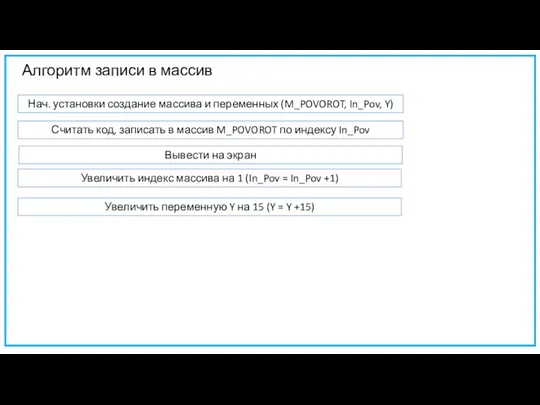
Алгоритм записи в массив
Нач. установки создание массива и переменных (M_POVOROT, In_Pov,
Алгоритм записи в массив
Нач. установки создание массива и переменных (M_POVOROT, In_Pov,
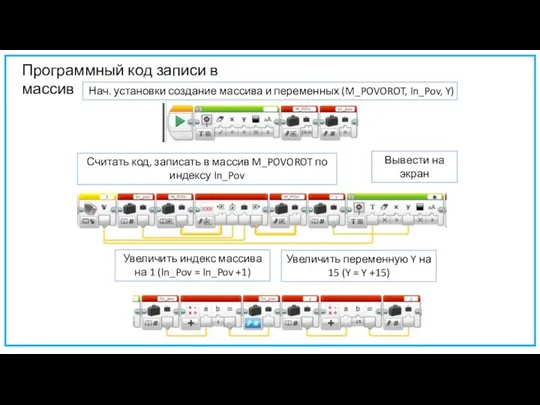
Программный код записи в массив
Нач. установки создание массива и переменных (M_POVOROT,
Программный код записи в массив
Нач. установки создание массива и переменных (M_POVOROT,

Программный код записи в массив, длина которого не определена
Нач. установки создание
Программный код записи в массив, длина которого не определена
Нач. установки создание

Расположение элемента массива для доступа. Определение индекса последнего элемента
Режим ДЛИНА
Длина
Расположение элемента массива для доступа. Определение индекса последнего элемента
Режим ДЛИНА
Длина
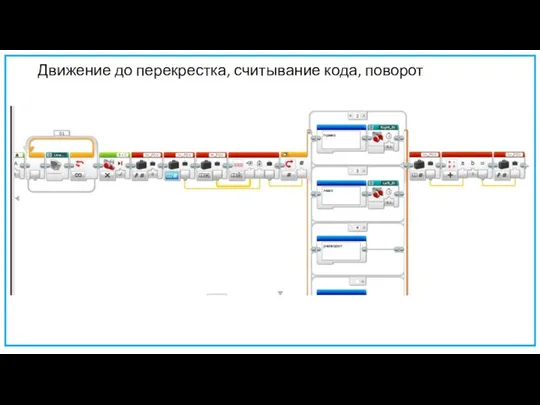
Движение до перекрестка, считывание кода, поворот
Движение до перекрестка, считывание кода, поворот
Движение по черной линии пропорциональный регулятор
2 датчика освещенности
2
мС
мВ
Идеальное состояние системы
Движение по черной линии пропорциональный регулятор
2 датчика освещенности
2
мС
мВ
Идеальное состояние системы
Движение по черной линии пропорциональный регулятор
2 датчика освещенности
Создание блока нач.
Движение по черной линии пропорциональный регулятор
2 датчика освещенности
Создание блока нач.
Движение по черной линии пропорциональный регулятор
2 датчика освещенности
Создание блока управляющего
Движение по черной линии пропорциональный регулятор
2 датчика освещенности
Создание блока управляющего
Движение по черной линии пропорциональный регулятор
2 датчика освещенности
Выход по черному-
Движение по черной линии пропорциональный регулятор
2 датчика освещенности
Выход по черному-
Движение по черной линии пропорциональный регулятор
2 датчика освещенности
Выход по черному-
Движение по черной линии пропорциональный регулятор
2 датчика освещенности
Выход по черному-
Движение по черной линии пропорциональный регулятор
2 датчика освещенности_ выход из
Движение по черной линии пропорциональный регулятор 2 датчика освещенности_ выход из

Движение по черной линии пропорциональный регулятор
2 датчика освещенности_ выход из
Движение по черной линии пропорциональный регулятор 2 датчика освещенности_ выход из

Движение по черной линии пропорциональный регулятор
2 датчика освещенности_ выход из
Движение по черной линии пропорциональный регулятор 2 датчика освещенности_ выход из

Движение по черной линии пропорциональный регулятор
2 датчика освещенности_ Создание блока
Движение по черной линии пропорциональный регулятор 2 датчика освещенности_ Создание блока
Движение по черной линии пропорциональный регулятор
2 датчика освещенности_ Создание блока
Движение по черной линии пропорциональный регулятор 2 датчика освещенности_ Создание блока
 Отличительные особенности электронной деловой переписки
Отличительные особенности электронной деловой переписки Инструментальные программные средства. Системы программирования
Инструментальные программные средства. Системы программирования Трансляция программы. Лекция 3
Трансляция программы. Лекция 3 Составление отчёта по выявленному нарушению в ППК ПАБ
Составление отчёта по выявленному нарушению в ППК ПАБ 1015355
1015355 История средств хранения, передачи и обработки информации. 9 класс
История средств хранения, передачи и обработки информации. 9 класс Системи автоматизованого проектування (САПР). Лекция 1
Системи автоматизованого проектування (САПР). Лекция 1 Современная поэзия. Где смотреть
Современная поэзия. Где смотреть Информационные ресурсы и сервисы интернета. Коммуникационные технологии
Информационные ресурсы и сервисы интернета. Коммуникационные технологии Диаграмма композитной структуры. Диаграмма пакетов. Диаграмма объектов
Диаграмма композитной структуры. Диаграмма пакетов. Диаграмма объектов Подключение к глобальной сети. Лекция 7
Подключение к глобальной сети. Лекция 7 KELI GROUP. Features
KELI GROUP. Features Find numbers 0-10 and click them
Find numbers 0-10 and click them Программный продукт ЭкоСфера-предприятие
Программный продукт ЭкоСфера-предприятие Основные этапы моделирования
Основные этапы моделирования Создание документов в WORD
Создание документов в WORD Blockchain - журнал с записями в хронологическом порядке
Blockchain - журнал с записями в хронологическом порядке Методы программирования в реальном времени
Методы программирования в реальном времени Язык SQL для работы с базами данных
Язык SQL для работы с базами данных САПР: системы автоматизированного проектирования
САПР: системы автоматизированного проектирования Тестирование документации
Тестирование документации Алгоритмы с повторением
Алгоритмы с повторением Quantitative research in management: methodology. Introduction to IBM SPSS
Quantitative research in management: methodology. Introduction to IBM SPSS Компьютерные сети. Адреса в интернете
Компьютерные сети. Адреса в интернете Информация в живой и неживой природе. Информационные процессы
Информация в живой и неживой природе. Информационные процессы Брейн ринг по информатике
Брейн ринг по информатике Составление библиографического описания: библиографическое описание документа, общие требования
Составление библиографического описания: библиографическое описание документа, общие требования От скуки на все руки. Кроссворд
От скуки на все руки. Кроссворд