Библиотеки PID_Regulators и PID_Reg2. Программные ПИД-регуляторы (на примере пакета CoDeSys) презентация
- Библиотеки PID_Regulators и PID_Reg2. Программные ПИД-регуляторы (на примере пакета CoDeSys)

Содержание
- 2. Вопросы лекции функции и функциональные блоки библиотеки PID_Regulators и PID_Reg2 порядок применения Ф и ФБ реализация
- 3. PID_Regulators.lib Внутренняя библиотека – не работает без контроллера отладка программы в режиме визуализации происходит только при
- 4. Измерительные ФБ для систем управления декодирование ошибки измерителя (DECODE_FLOAT) в случае появления ошибки преобразования в ПЛК
- 5. Коды ошибок 0 – нет ошибок 6 – нет данных 7 – датчик отключен 8 –
- 6. ЦФ для аналоговых значений (DIG_FLTR) ФБ позволяет уменьшить влияние ВЧ и случайных ИП на измеренную величину
- 7. Управление «задвижкой» с датчиком положения (VALVE_REG) Управление задвижкой без датчика положения (VALVE_REG_NO_POS) Двухпозиционный регулятор с гистерезисом
- 8. Регулятор без автонастройки (PID_FUNCTION) ФБ управляет 3-позиционными ИМ задвижками, жалюзями и др. двумя дискретными сигналами на
- 9. ReversTime – интервал между отключением и включением на обратное направление в паспорте для ИМ типа МЭО-87
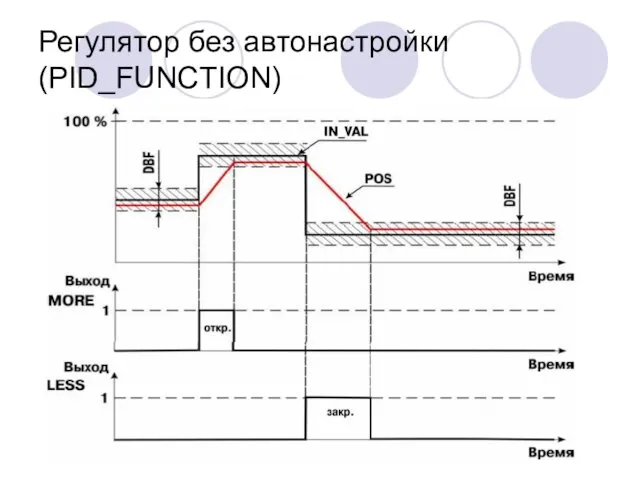
- 10. Регулятор без автонастройки (PID_FUNCTION)
- 11. Управление задвижкой без ДП (VALVE_REG_NO_POS) ФБ управляет 3-х позиционными ИМ (типа «задвижка») без датчика положения ставит
- 12. SINС: BOOL синхронизация начального положения при подаче значения TRUE на этот вход, текущее положение задвижки приравнивается
- 13. Двухпозиционный регулятор с гистерезисом (ON_OFF_HIST_REG) ФБ управляет вкл.–откл. ИМ типа «нагреватель» и/или «холодильник» для поддержания установленного
- 14. ПИД-регуляторы Регулятор без автонастройки (PID_FUNCTION) Регулятор с автонастройкой первого типа (PID_2POS_IM_ANR) Регулятор с автонастройкой второго типа
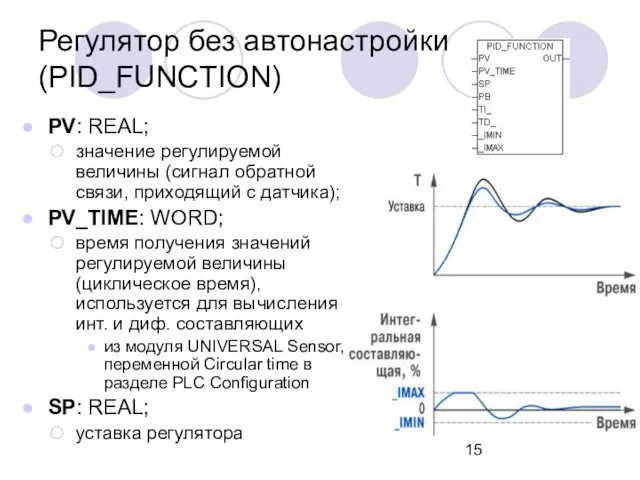
- 15. Регулятор без автонастройки (PID_FUNCTION) PV: REAL; значение регулируемой величины (сигнал обратной связи, приходящий с датчика); PV_TIME:
- 16. PB: REAL; полоса пропорциональности (в единицах регулируемой величины) чем шире полоса пропорциональности, тем меньше величина выходного
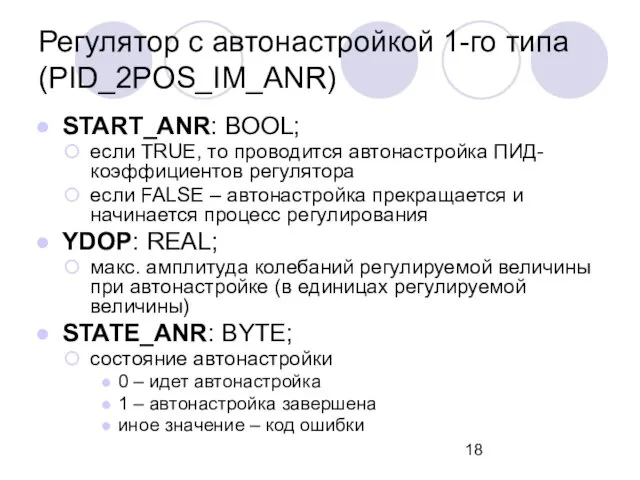
- 17. Регулятор с автонастройкой 1-го типа (PID_2POS_IM_ANR) Фб предназначен для работы с ИМ не учитывает время изменения
- 18. START_ANR: BOOL; если TRUE, то проводится автонастройка ПИД-коэффициентов регулятора если FALSE – автонастройка прекращается и начинается
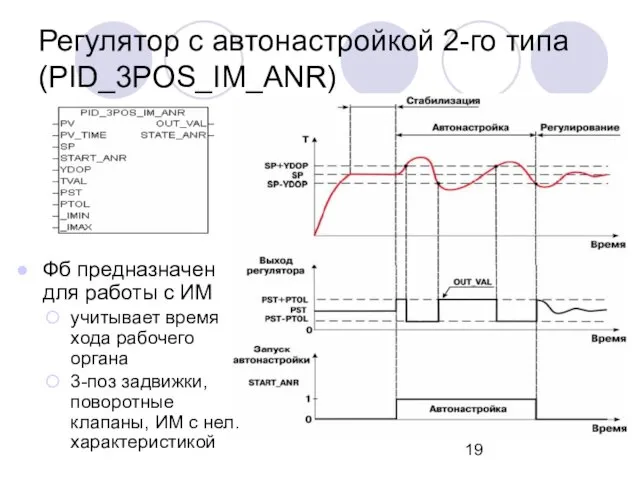
- 19. Регулятор с автонастройкой 2-го типа (PID_3POS_IM_ANR) Фб предназначен для работы с ИМ учитывает время хода рабочего
- 20. для автонастройки следует задать начальную мощность, с которой следует начинать автонастройку (параметр PST) и ограничение колебания
- 21. YDOP: REAL; макс. амплитуда колебаний регулируемой величины при автонастройке TVAL: REAL; время хода рабочего органа ИМ
- 22. Задача Поддержание заданной температуры в сушильном шкафу необходимо поддерживать определенную температуру выбор нужного значения температуры (+80°С
- 23. Задача
- 24. 0001 на входе SP ПИД-регулятора в градусах Цельсия указывается значение необходимой температуры (sp_value=80 или 90) на
- 25. Задача
- 26. Библиотека PID_Reg2 ФБ регулятора с АНР для 2-х позиционного ИМ (APID_PWM и APID_PWM_W2) ФБ регулятора с
- 27. ФБ управления 3-х позиционным ИМ с датчиком положения (VALVE_POS_DY) ФБ управления 3-х позиционным ИМ без датчика
- 29. Скачать презентацию
Вопросы лекции
функции и функциональные блоки библиотеки PID_Regulators и PID_Reg2
порядок применения Ф
Вопросы лекции
функции и функциональные блоки библиотеки PID_Regulators и PID_Reg2
порядок применения Ф
PID_Regulators.lib
Внутренняя библиотека – не работает без контроллера
отладка программы в режиме визуализации
PID_Regulators.lib
Внутренняя библиотека – не работает без контроллера
отладка программы в режиме визуализации
Измерительные ФБ для систем управления
декодирование ошибки измерителя (DECODE_FLOAT)
в случае появления ошибки
Измерительные ФБ для систем управления
декодирование ошибки измерителя (DECODE_FLOAT)
в случае появления ошибки
Коды ошибок
0 – нет ошибок
6 – нет данных
7 –
Коды ошибок
0 – нет ошибок
6 – нет данных
7 –
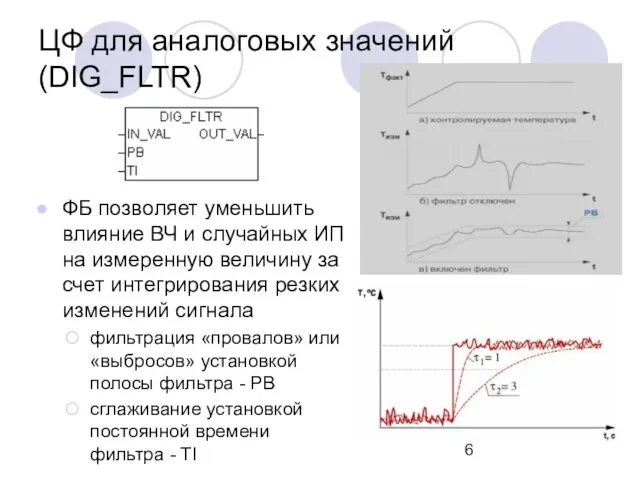
ЦФ для аналоговых значений (DIG_FLTR)
ФБ позволяет уменьшить влияние ВЧ и случайных
ЦФ для аналоговых значений (DIG_FLTR)
ФБ позволяет уменьшить влияние ВЧ и случайных
Управление «задвижкой» с датчиком положения (VALVE_REG)
Управление задвижкой без датчика положения (VALVE_REG_NO_POS)
Двухпозиционный
Управление «задвижкой» с датчиком положения (VALVE_REG)
Управление задвижкой без датчика положения (VALVE_REG_NO_POS)
Двухпозиционный
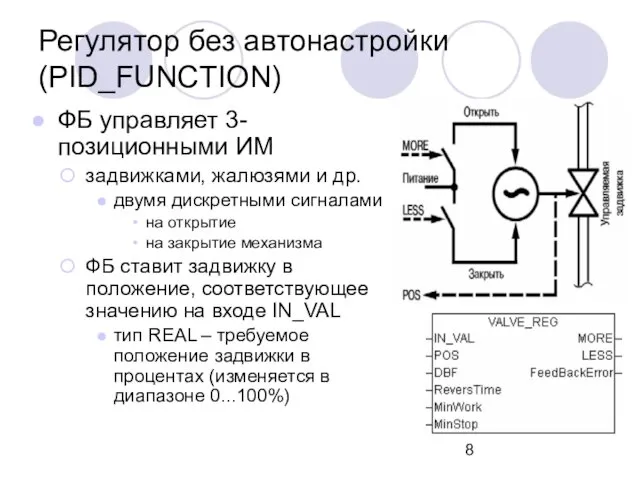
Регулятор без автонастройки (PID_FUNCTION)
ФБ управляет 3-позиционными ИМ
задвижками, жалюзями и др.
двумя дискретными
Регулятор без автонастройки (PID_FUNCTION)
ФБ управляет 3-позиционными ИМ
задвижками, жалюзями и др.
двумя дискретными
ReversTime – интервал между отключением и включением на обратное направление
в паспорте
ReversTime – интервал между отключением и включением на обратное направление
в паспорте
Регулятор без автонастройки (PID_FUNCTION)
Регулятор без автонастройки (PID_FUNCTION)
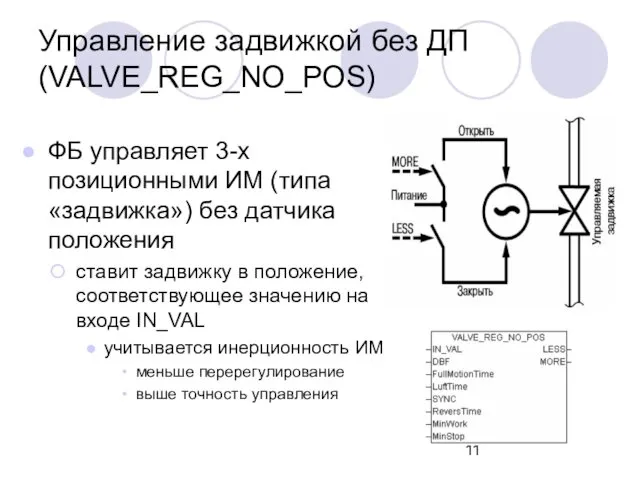
Управление задвижкой без ДП (VALVE_REG_NO_POS)
ФБ управляет 3-х позиционными ИМ (типа «задвижка»)
Управление задвижкой без ДП (VALVE_REG_NO_POS)
ФБ управляет 3-х позиционными ИМ (типа «задвижка»)
SINС: BOOL
синхронизация начального положения
при подаче значения TRUE на этот вход, текущее
SINС: BOOL
синхронизация начального положения
при подаче значения TRUE на этот вход, текущее
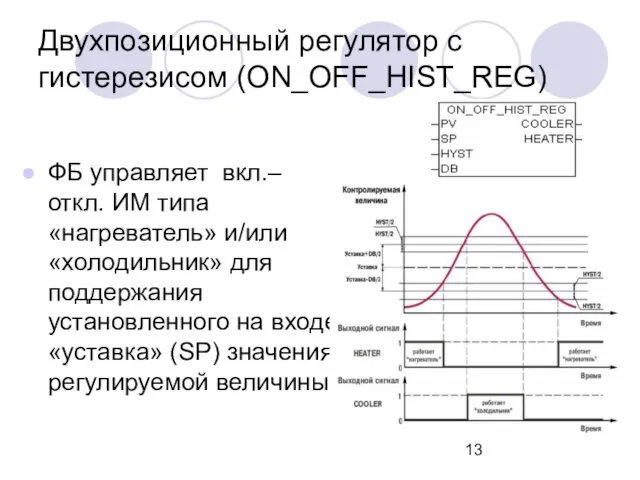
Двухпозиционный регулятор с гистерезисом (ON_OFF_HIST_REG)
ФБ управляет вкл.–откл. ИМ типа «нагреватель» и/или
Двухпозиционный регулятор с гистерезисом (ON_OFF_HIST_REG)
ФБ управляет вкл.–откл. ИМ типа «нагреватель» и/или
ПИД-регуляторы
Регулятор без автонастройки (PID_FUNCTION)
Регулятор с автонастройкой первого типа (PID_2POS_IM_ANR)
Регулятор с
ПИД-регуляторы
Регулятор без автонастройки (PID_FUNCTION)
Регулятор с автонастройкой первого типа (PID_2POS_IM_ANR)
Регулятор с
Регулятор без автонастройки (PID_FUNCTION)
PV: REAL;
значение регулируемой величины (сигнал обратной связи,
Регулятор без автонастройки (PID_FUNCTION)
PV: REAL;
значение регулируемой величины (сигнал обратной связи,
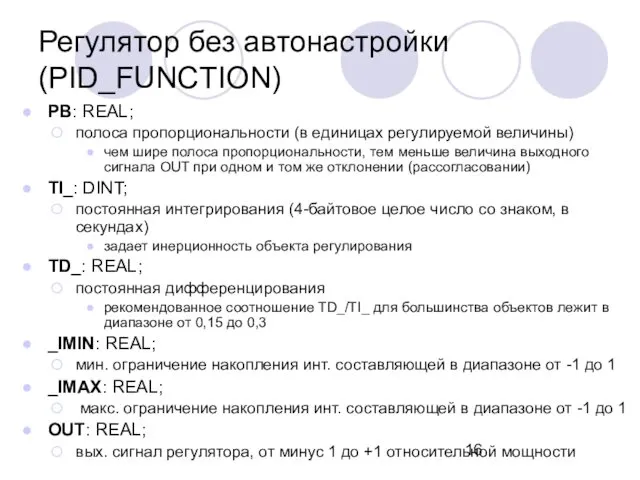
PB: REAL;
полоса пропорциональности (в единицах регулируемой величины)
чем шире полоса пропорциональности, тем
PB: REAL;
полоса пропорциональности (в единицах регулируемой величины)
чем шире полоса пропорциональности, тем
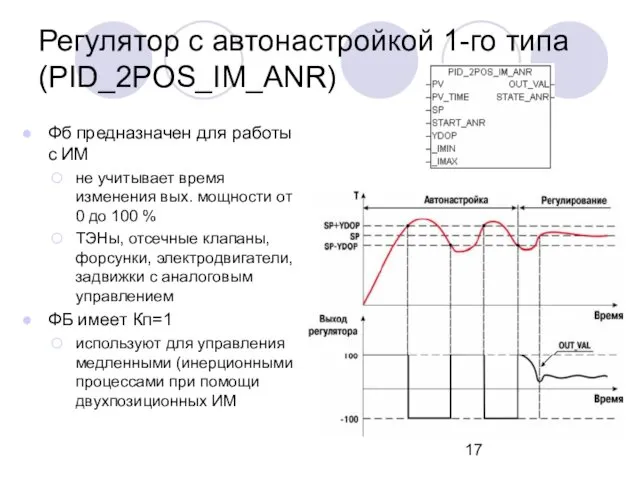
Регулятор с автонастройкой 1-го типа (PID_2POS_IM_ANR)
Фб предназначен для работы с ИМ
не
Регулятор с автонастройкой 1-го типа (PID_2POS_IM_ANR)
Фб предназначен для работы с ИМ
не
START_ANR: BOOL;
если TRUE, то проводится автонастройка ПИД-коэффициентов регулятора
если FALSE – автонастройка
START_ANR: BOOL;
если TRUE, то проводится автонастройка ПИД-коэффициентов регулятора
если FALSE – автонастройка
Регулятор с автонастройкой 2-го типа (PID_3POS_IM_ANR)
Фб предназначен для работы с ИМ
учитывает
Регулятор с автонастройкой 2-го типа (PID_3POS_IM_ANR)
Фб предназначен для работы с ИМ
учитывает
для автонастройки следует задать начальную мощность, с которой следует начинать автонастройку
для автонастройки следует задать начальную мощность, с которой следует начинать автонастройку
YDOP: REAL;
макс. амплитуда колебаний регулируемой величины при автонастройке
TVAL: REAL;
время
YDOP: REAL;
макс. амплитуда колебаний регулируемой величины при автонастройке
TVAL: REAL;
время
Задача
Поддержание заданной температуры
в сушильном шкафу необходимо поддерживать определенную температуру
выбор нужного
Задача
Поддержание заданной температуры
в сушильном шкафу необходимо поддерживать определенную температуру
выбор нужного
Задача
Задача
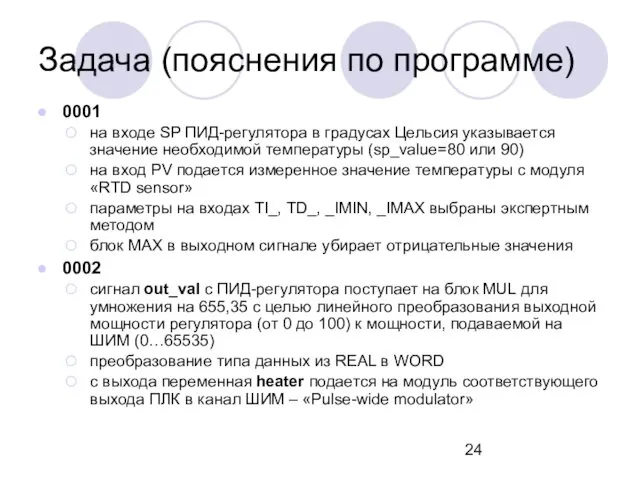
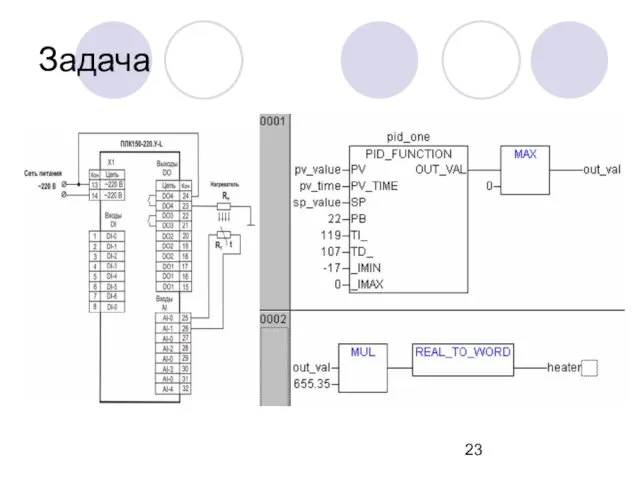
0001
на входе SP ПИД-регулятора в градусах Цельсия указывается значение необходимой
0001
на входе SP ПИД-регулятора в градусах Цельсия указывается значение необходимой
Задача
Задача
Библиотека PID_Reg2
ФБ регулятора с АНР для 2-х позиционного ИМ (APID_PWM и
Библиотека PID_Reg2
ФБ регулятора с АНР для 2-х позиционного ИМ (APID_PWM и
ФБ управления 3-х позиционным ИМ с датчиком положения (VALVE_POS_DY)
ФБ управления 3-х
ФБ управления 3-х позиционным ИМ с датчиком положения (VALVE_POS_DY)
ФБ управления 3-х
 Устройство компьютера. (10 класс)
Устройство компьютера. (10 класс) Подпрограммы. Структурное проектирование алгоритма и программы
Подпрограммы. Структурное проектирование алгоритма и программы Історія виникнення пристроїв для роботи з інформацією. Джерело інформаці
Історія виникнення пристроїв для роботи з інформацією. Джерело інформаці Технология. Информационная технология. Понятие и структура. (Лекция 1)
Технология. Информационная технология. Понятие и структура. (Лекция 1) Поиск информации в сети Internet
Поиск информации в сети Internet История появления компьютера
История появления компьютера компьютерный тест по теме Множества (информатика по программе Горячева А.В., 4 класс)
компьютерный тест по теме Множества (информатика по программе Горячева А.В., 4 класс) Докинг. Hadoop
Докинг. Hadoop Глобальное информационное общество
Глобальное информационное общество Физическая защита данных на дисках
Физическая защита данных на дисках Перспективы DOCSIS 3.0 в России
Перспективы DOCSIS 3.0 в России Информационные агентства
Информационные агентства Алгоритмізація та програмування. Поняття алгоритму. Властивості алгоритму. Форми подання алгоритму
Алгоритмізація та програмування. Поняття алгоритму. Властивості алгоритму. Форми подання алгоритму Программное обеспечение. Лекция 6
Программное обеспечение. Лекция 6 Стандартизация сетей. Модель OSI
Стандартизация сетей. Модель OSI Кодирование. Оптимальный код Хаффмана. Лекция 14
Кодирование. Оптимальный код Хаффмана. Лекция 14 Автоматизация обучения, оценки и развития персонала. Программные продукты и решения компании WebSoft
Автоматизация обучения, оценки и развития персонала. Программные продукты и решения компании WebSoft Массивы в Паскале. Одномерные массивы
Массивы в Паскале. Одномерные массивы Автоматизация службы охраны труда
Автоматизация службы охраны труда Компьютерные технологии на службе криминалистики
Компьютерные технологии на службе криминалистики Внедрение Kubernetes для динамического создания тестовых окружений
Внедрение Kubernetes для динамического создания тестовых окружений Компьютерные сети. Локальная сеть
Компьютерные сети. Локальная сеть Создание базы данных
Создание базы данных Защита информации
Защита информации Проектирование баз данных. Концептуальное и даталогическое проектирование баз данных
Проектирование баз данных. Концептуальное и даталогическое проектирование баз данных Презентация Microsoft Office PowerPoint
Презентация Microsoft Office PowerPoint Интернет. СМИ
Интернет. СМИ Захист інформації в банківських та комерційних системах
Захист інформації в банківських та комерційних системах