- CAN та CANOpen. Загальне представлення

Содержание
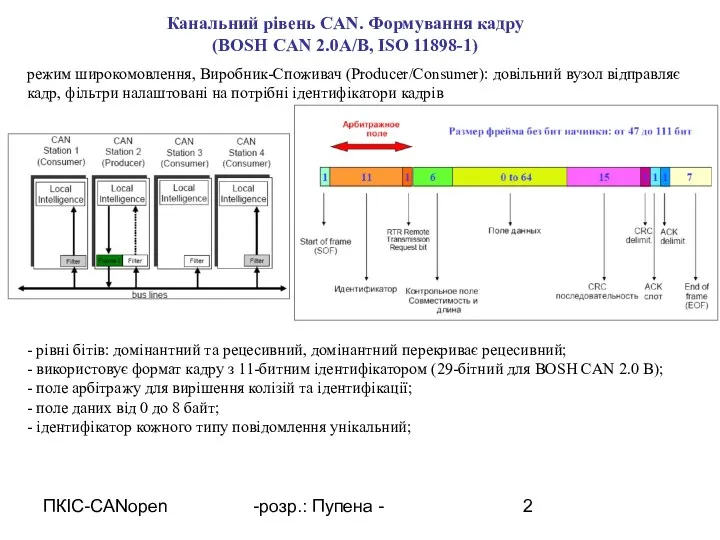
- 2. ПКІС-CANopen -розр.: Пупена - Канальний рівень CAN. Формування кадру (BOSH CAN 2.0A/B, ISO 11898-1) рівні бітів:
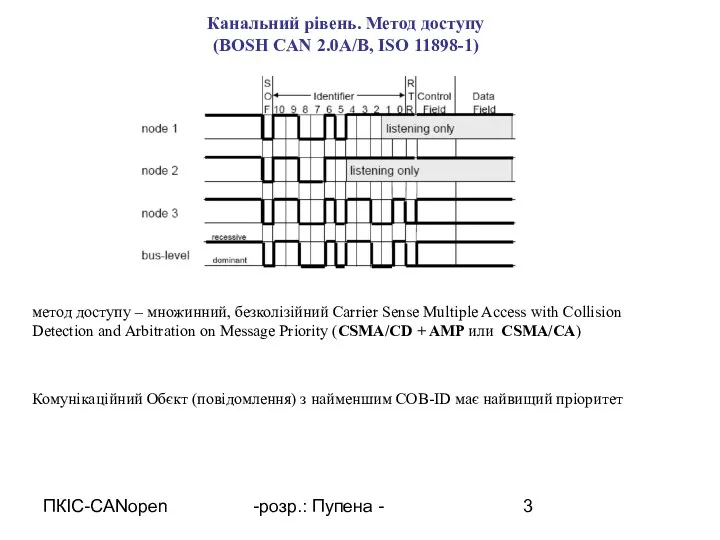
- 3. ПКІС-CANopen -розр.: Пупена - Канальний рівень. Метод доступу (BOSH CAN 2.0A/B, ISO 11898-1) метод доступу –
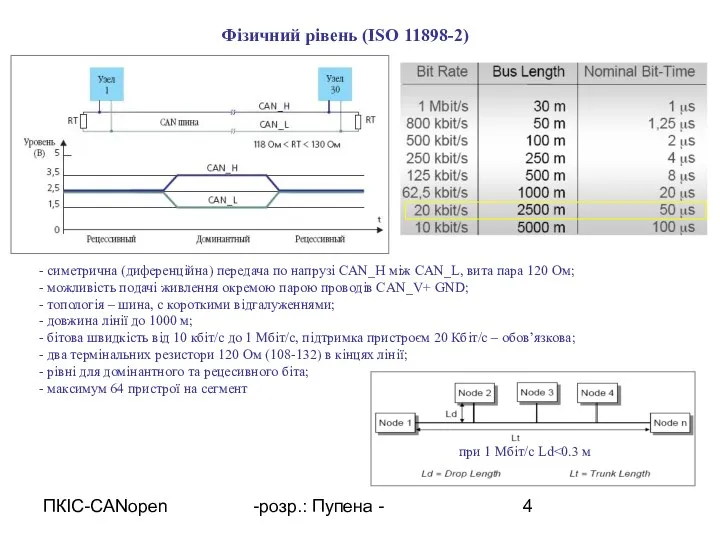
- 4. ПКІС-CANopen -розр.: Пупена - Фізичний рівень (ISO 11898-2) симетрична (диференційна) передача по напрузі CAN_H між CAN_L,
- 5. ПКІС-CANopen -розр.: Пупена - CANOpen. Загальне представлення. розроблений і підтримується CiA (CAN in Automation http://www.can-cia.de) підтримує
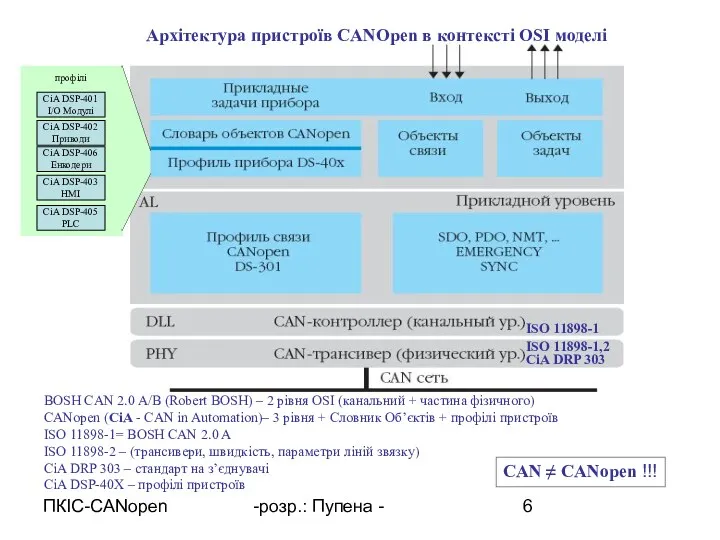
- 6. ПКІС-CANopen -розр.: Пупена - Архітектура пристроїв CANOpen в контексті OSI моделі CAN ≠ CANopen !!! BOSH
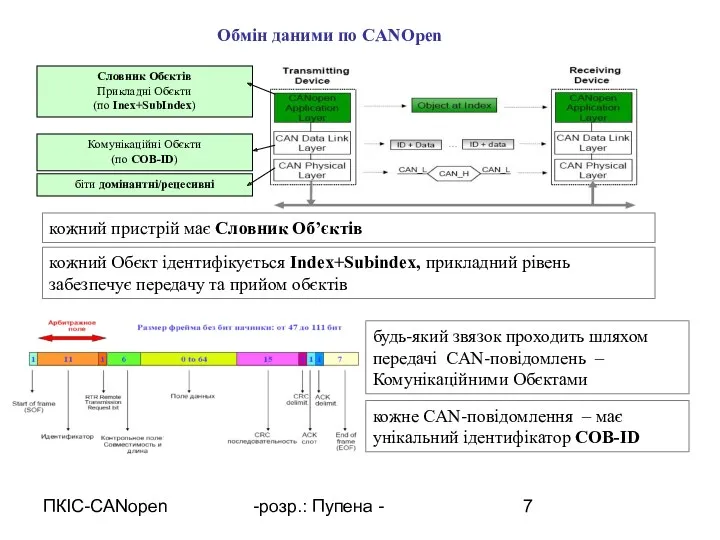
- 7. ПКІС-CANopen -розр.: Пупена - Обмін даними по CANOpen Словник Обєктів Прикладні Обєкти (по Inex+SubIndex) Комунікаційні Обєкти
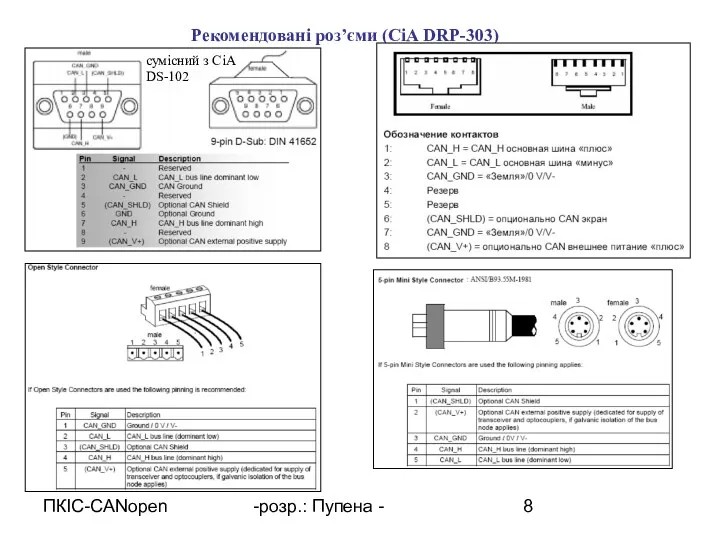
- 8. ПКІС-CANopen -розр.: Пупена - Рекомендовані роз’єми (CiA DRP-303)
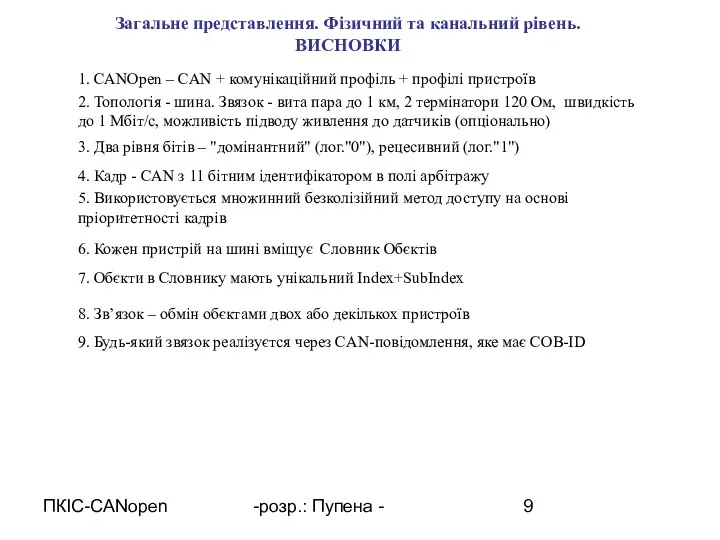
- 9. ПКІС-CANopen -розр.: Пупена - Загальне представлення. Фізичний та канальний рівень. ВИСНОВКИ 1. CANOpen – CAN +
- 10. ПКІС-CANopen -розр.: Пупена - Комунікаційні Об’єкти. Загальне Представлення обєкти даних процесу обєкти сервісних даних адміністративні повідомлення
- 11. ПКІС-CANopen -розр.: Пупена - Функціонування PDO - Модель обміну Producer/Consumer (Виробник/Споживач), не вимагає телеграми підтвердження доставки
- 12. ПКІС-CANopen -розр.: Пупена - PDO-Mapping Відображення даних процесу на PDO Дані із Словнику Обєктів відображаються на
- 13. ПКІС-CANopen -розр.: Пупена - Network Management (NMT). Базові поняття адміністрування мережі. Адміністрування мережі включає групу сервісів:
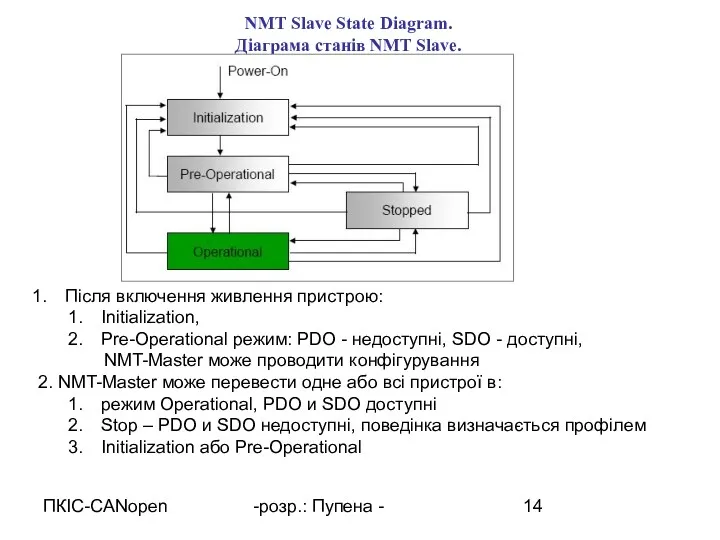
- 14. ПКІС-CANopen -розр.: Пупена - NMT Slave State Diagram. Діаграма станів NMT Slave. Після включення живлення пристрою:
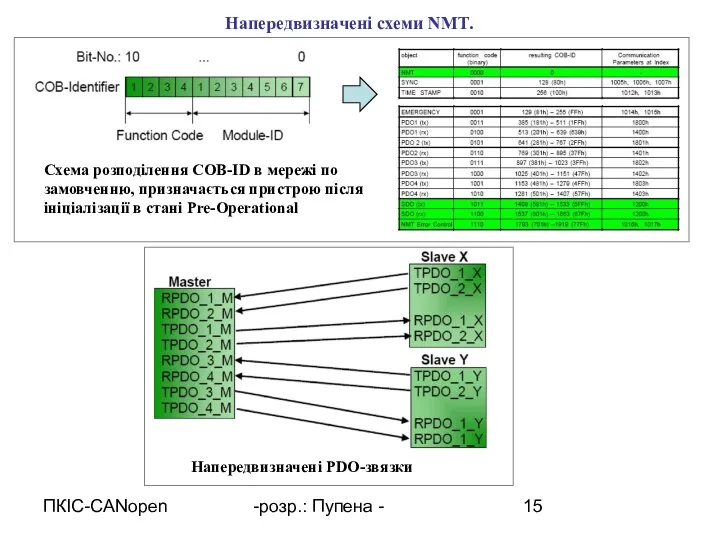
- 15. ПКІС-CANopen -розр.: Пупена - Напередвизначені схеми NMT. Напередвизначені PDO-звязки Схема розподілення COB-ID в мережі по замовченню,
- 17. Скачать презентацию
ПКІС-CANopen
-розр.: Пупена -
Канальний рівень CAN. Формування кадру
(BOSH CAN 2.0A/B, ISO
ПКІС-CANopen
-розр.: Пупена -
Канальний рівень CAN. Формування кадру
(BOSH CAN 2.0A/B, ISO
ПКІС-CANopen
-розр.: Пупена -
Канальний рівень. Метод доступу
(BOSH CAN 2.0A/B, ISO 11898-1)
метод
ПКІС-CANopen
-розр.: Пупена -
Канальний рівень. Метод доступу
(BOSH CAN 2.0A/B, ISO 11898-1)
метод
ПКІС-CANopen
-розр.: Пупена -
Фізичний рівень (ISO 11898-2)
симетрична (диференційна) передача по напрузі
ПКІС-CANopen
-розр.: Пупена -
Фізичний рівень (ISO 11898-2)
симетрична (диференційна) передача по напрузі
ПКІС-CANopen
-розр.: Пупена -
CANOpen. Загальне представлення.
розроблений і підтримується CiA (CAN
ПКІС-CANopen
-розр.: Пупена -
CANOpen. Загальне представлення.
розроблений і підтримується CiA (CAN
ПКІС-CANopen
-розр.: Пупена -
Архітектура пристроїв CANOpen в контексті OSI моделі
CAN ≠
ПКІС-CANopen
-розр.: Пупена -
Архітектура пристроїв CANOpen в контексті OSI моделі
CAN ≠
ПКІС-CANopen
-розр.: Пупена -
Обмін даними по CANOpen
Словник Обєктів
Прикладні Обєкти
(по Inex+SubIndex)
Комунікаційні Обєкти
ПКІС-CANopen
-розр.: Пупена -
Обмін даними по CANOpen
Словник Обєктів
Прикладні Обєкти
(по Inex+SubIndex)
Комунікаційні Обєкти
ПКІС-CANopen
-розр.: Пупена -
Рекомендовані роз’єми (CiA DRP-303)
ПКІС-CANopen
-розр.: Пупена -
Рекомендовані роз’єми (CiA DRP-303)
ПКІС-CANopen
-розр.: Пупена -
Загальне представлення. Фізичний та канальний рівень.
ВИСНОВКИ
1. CANOpen –
ПКІС-CANopen
-розр.: Пупена -
Загальне представлення. Фізичний та канальний рівень.
ВИСНОВКИ
1. CANOpen –
ПКІС-CANopen
-розр.: Пупена -
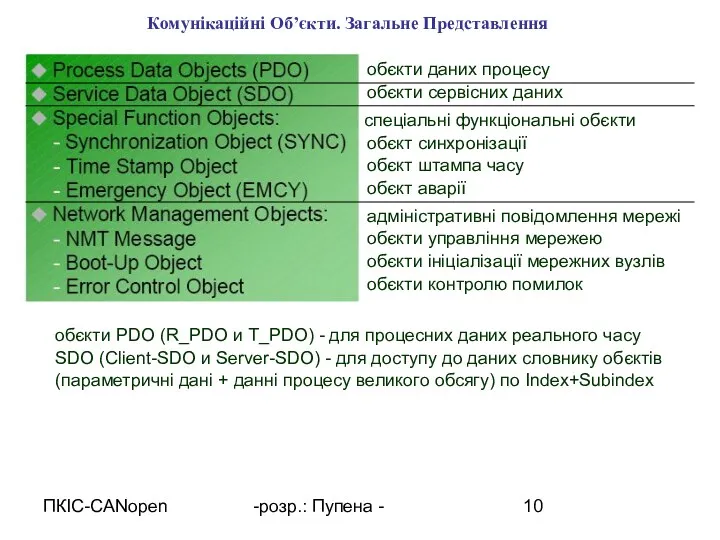
Комунікаційні Об’єкти. Загальне Представлення
обєкти даних процесу
обєкти сервісних даних
адміністративні повідомлення
ПКІС-CANopen
-розр.: Пупена -
Комунікаційні Об’єкти. Загальне Представлення
обєкти даних процесу
обєкти сервісних даних
адміністративні повідомлення
ПКІС-CANopen
-розр.: Пупена -
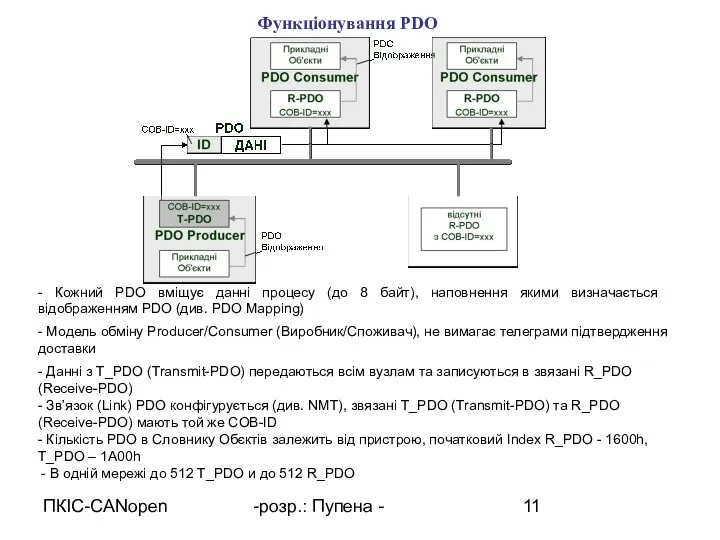
Функціонування PDO
- Модель обміну Producer/Consumer (Виробник/Споживач), не вимагає телеграми
ПКІС-CANopen
-розр.: Пупена -
Функціонування PDO
- Модель обміну Producer/Consumer (Виробник/Споживач), не вимагає телеграми
ПКІС-CANopen
-розр.: Пупена -
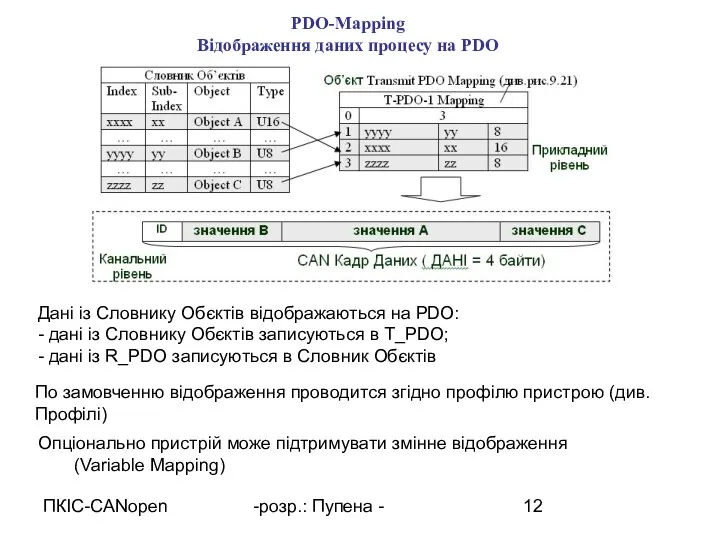
PDO-Mapping
Відображення даних процесу на PDO
Дані із Словнику Обєктів відображаються
ПКІС-CANopen
-розр.: Пупена -
PDO-Mapping
Відображення даних процесу на PDO
Дані із Словнику Обєктів відображаються
ПКІС-CANopen
-розр.: Пупена -
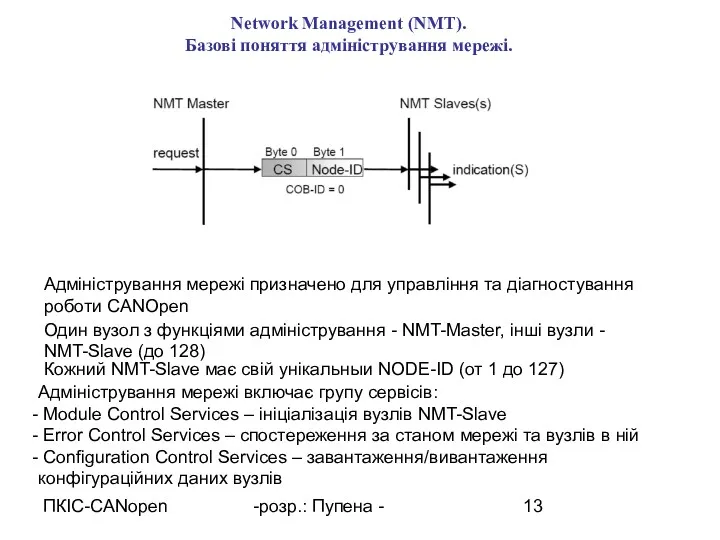
Network Management (NMT).
Базові поняття адміністрування мережі.
Адміністрування мережі
ПКІС-CANopen
-розр.: Пупена -
Network Management (NMT).
Базові поняття адміністрування мережі.
Адміністрування мережі
ПКІС-CANopen
-розр.: Пупена -
NMT Slave State Diagram.
Діаграма станів NMT Slave.
Після
ПКІС-CANopen
-розр.: Пупена -
NMT Slave State Diagram.
Діаграма станів NMT Slave.
Після
ПКІС-CANopen
-розр.: Пупена -
Напередвизначені схеми NMT.
Напередвизначені PDO-звязки
Схема розподілення COB-ID в
ПКІС-CANopen
-розр.: Пупена -
Напередвизначені схеми NMT.
Напередвизначені PDO-звязки
Схема розподілення COB-ID в
 Инструкция по работе с анкетой Naumen
Инструкция по работе с анкетой Naumen Пополнение карты Стрелка в мобильном приложении
Пополнение карты Стрелка в мобильном приложении нформационные ресурсы общества Информационные услуги и продукты
нформационные ресурсы общества Информационные услуги и продукты Как вебмастеру выжить в условиях кризиса
Как вебмастеру выжить в условиях кризиса Как устроена компьютерная сеть
Как устроена компьютерная сеть Анализ и синтез систем
Анализ и синтез систем Объектно-ориентированное программирование. Практические работы Pascal ABC
Объектно-ориентированное программирование. Практические работы Pascal ABC Інтернет. Громадянська освіта. 10 клас
Інтернет. Громадянська освіта. 10 клас Pro-women.ru — организация для влияния на социально-образовательные экосистемы людей
Pro-women.ru — организация для влияния на социально-образовательные экосистемы людей Производственная практика. ADO.NET и COM при работе с MS ACCESS и MS EXCEL в десктопном приложении
Производственная практика. ADO.NET и COM при работе с MS ACCESS и MS EXCEL в десктопном приложении Обработка исключительных ситуаций
Обработка исключительных ситуаций Word 2007: спецкурс
Word 2007: спецкурс Технология объектно-ориентированного проектирования ИС (разработки программного обеспечения) – Rational Unified Process (RUP)
Технология объектно-ориентированного проектирования ИС (разработки программного обеспечения) – Rational Unified Process (RUP) Инновационные модели деятельности школьного библиотекаря по формированию экологической культуры у детей
Инновационные модели деятельности школьного библиотекаря по формированию экологической культуры у детей Алгоритмизация и программирование (лекция)
Алгоритмизация и программирование (лекция) Средства общения в сети Интернет
Средства общения в сети Интернет Опыт внедрения системы электронного документооборота Правительства Ульяновской области
Опыт внедрения системы электронного документооборота Правительства Ульяновской области Урок по теме Сортировка, удаление и добавление записей 8 класс
Урок по теме Сортировка, удаление и добавление записей 8 класс Возможности 3D технологий
Возможности 3D технологий Принципы работы протоколов разных уровней. . Стеки OSI, TCP/IP, IPX/SPX, NetBIOS/SMB. (Тема 11)
Принципы работы протоколов разных уровней. . Стеки OSI, TCP/IP, IPX/SPX, NetBIOS/SMB. (Тема 11) Принципы обработки информации компьютером. Арифметические и логические основы работы компьютера. Лекция 5
Принципы обработки информации компьютером. Арифметические и логические основы работы компьютера. Лекция 5 Компьютерное моделирование
Компьютерное моделирование Кибербуллинг
Кибербуллинг C++ для ЕГЭ
C++ для ЕГЭ Электронные таблицы MS Excel
Электронные таблицы MS Excel Стандартные приложения ОС Windows. Работа с файлами и папками
Стандартные приложения ОС Windows. Работа с файлами и папками Динамические структуры данных: очереди и стеки
Динамические структуры данных: очереди и стеки Сервер DHCP и его назначение
Сервер DHCP и его назначение