- Dataflow bending programs

Содержание
- 2. Dataflow overview
- 3. Inputs SAT part model Material database Press brake tools Cell information Robot grippers / Regrip station
- 4. SAT part model: *.sat 3D model of part in bent shape File format: SAT 6.0 or
- 5. Material database For non standard materials, samples for every occuring thickness of the material must be
- 6. Flat pattern drawing: *.dxf Taking into account the material behaviour (material database) and the used press
- 7. Press NC program: *.prj The press NC program will be exported in the *.prj format. This
- 8. Preformatted file for BendTech PC: *.fxm This file contains bending information that is relevant for the
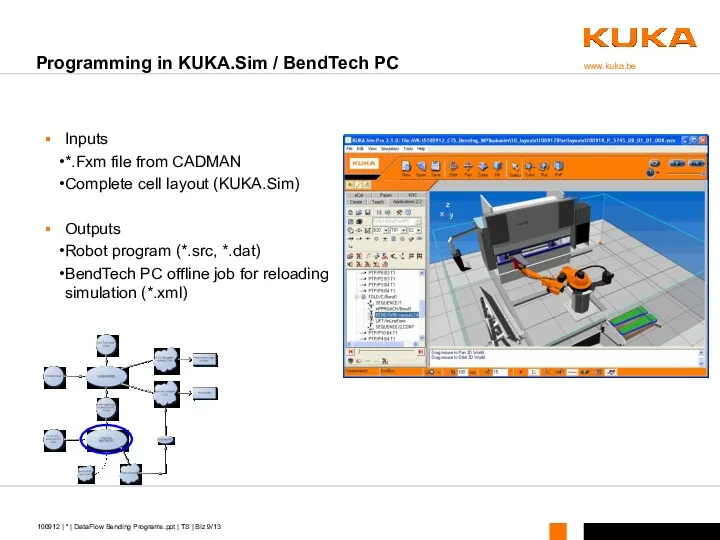
- 9. Inputs *.Fxm file from CADMAN Complete cell layout (KUKA.Sim) Outputs Robot program (*.src, *.dat) BendTech PC
- 10. The complete cell layout in KUKA.Sim is modelled by KUKA. This layouts contains all functional components
- 11. Fxm file from CADMAN Part geometry Press brake program Grasp frames Used gripper geometry Functional program
- 12. Robot program Collision free With stacking patterns Reachable … Programming in KUKA.Sim / BendTech PC: outputs
- 14. Скачать презентацию
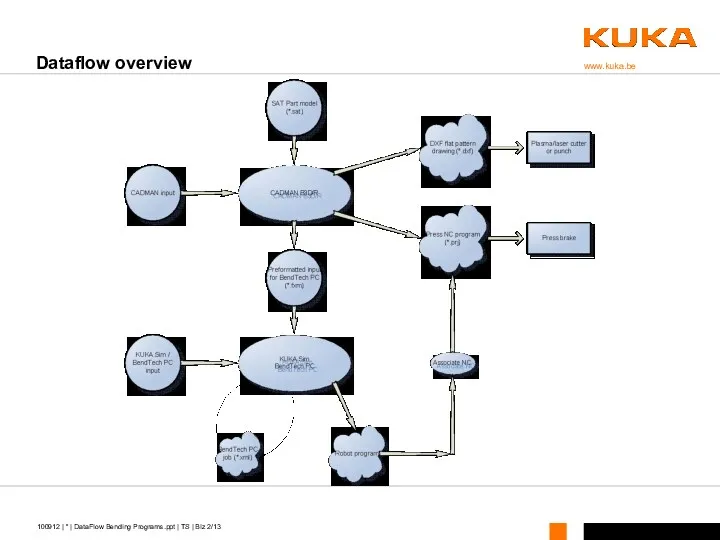
Dataflow overview
Dataflow overview
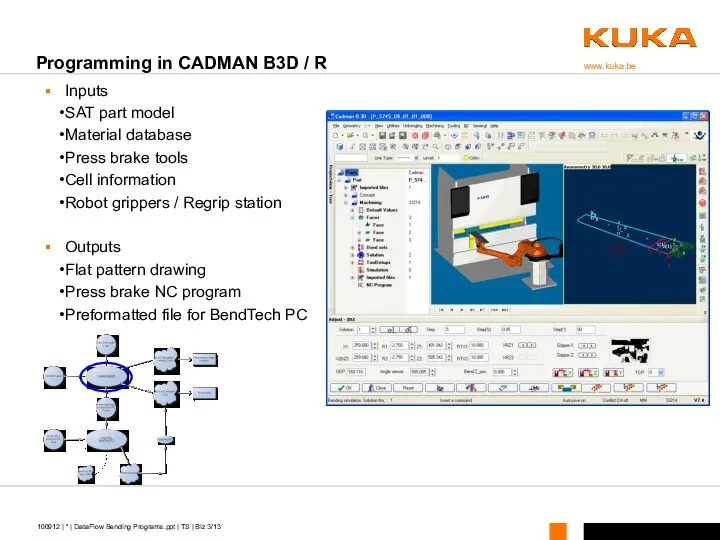
Inputs
SAT part model
Material database
Press brake tools
Cell information
Robot grippers / Regrip station
Outputs
Flat
Inputs
SAT part model
Material database
Press brake tools
Cell information
Robot grippers / Regrip station
Outputs
Flat
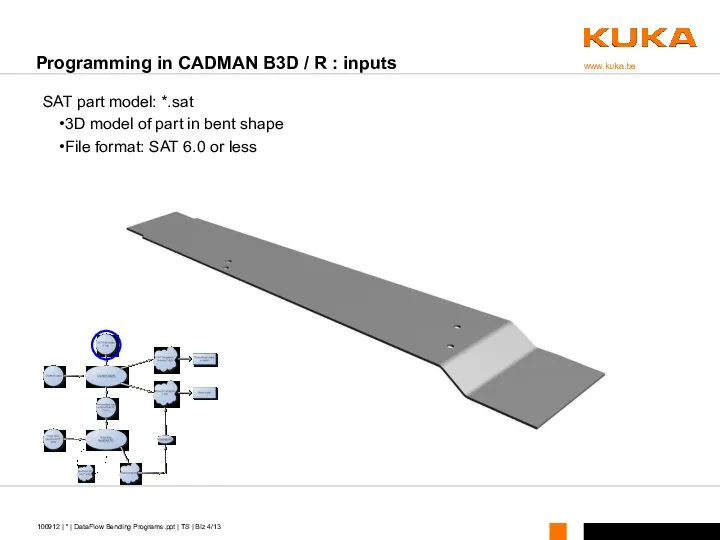
SAT part model: *.sat
3D model of part in bent shape
File format:
SAT part model: *.sat
3D model of part in bent shape
File format:
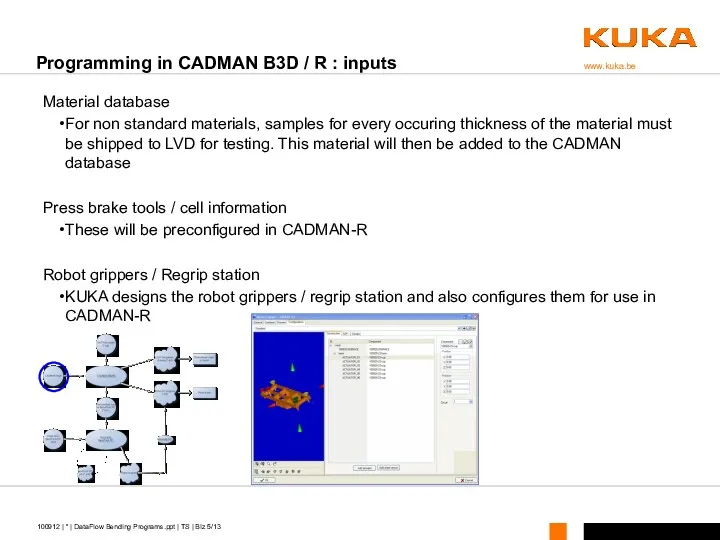
Material database
For non standard materials, samples for every occuring thickness of
Material database
For non standard materials, samples for every occuring thickness of
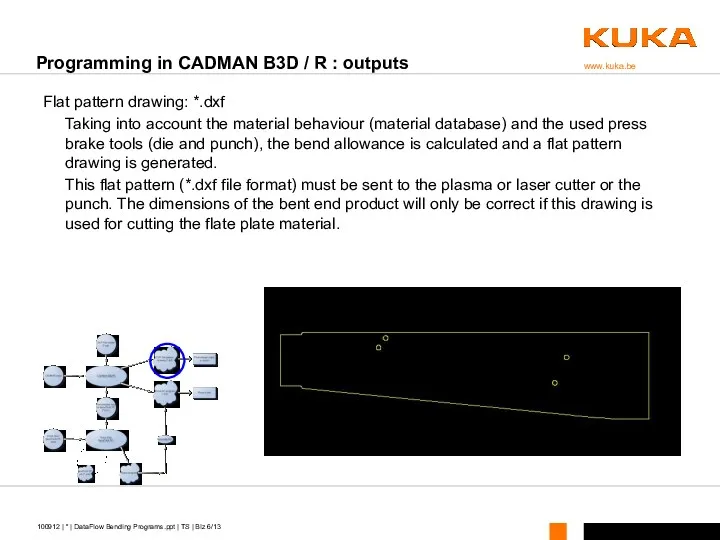
Flat pattern drawing: *.dxf
Taking into account the material behaviour (material database)
Flat pattern drawing: *.dxf
Taking into account the material behaviour (material database)
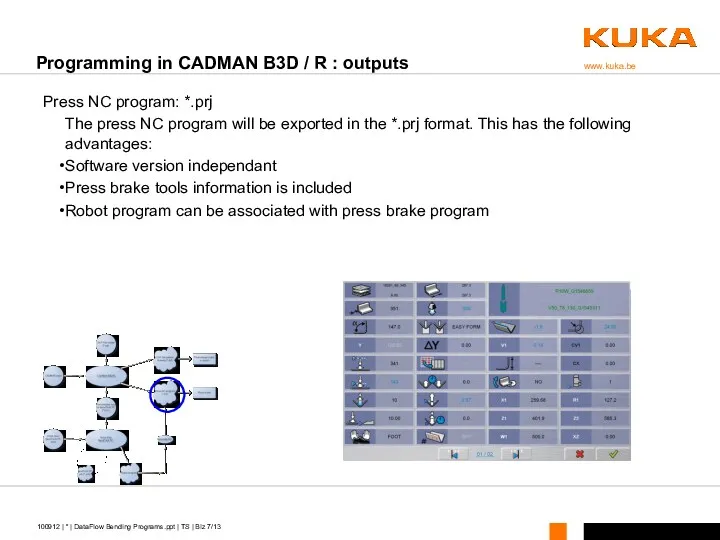
Press NC program: *.prj
The press NC program will be exported in
Press NC program: *.prj
The press NC program will be exported in
Preformatted file for BendTech PC: *.fxm
This file contains bending information that
Preformatted file for BendTech PC: *.fxm
This file contains bending information that
Inputs
*.Fxm file from CADMAN
Complete cell layout (KUKA.Sim)
Outputs
Robot program (*.src, *.dat)
BendTech PC
Inputs
*.Fxm file from CADMAN
Complete cell layout (KUKA.Sim)
Outputs
Robot program (*.src, *.dat)
BendTech PC
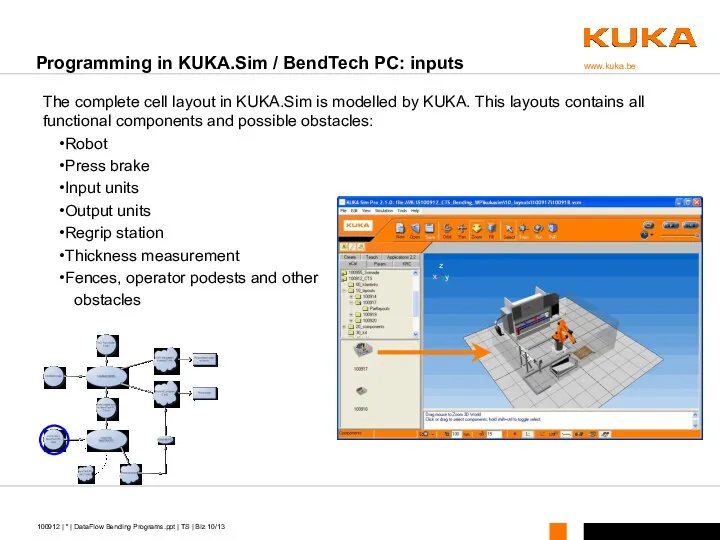
The complete cell layout in KUKA.Sim is modelled by KUKA. This
The complete cell layout in KUKA.Sim is modelled by KUKA. This
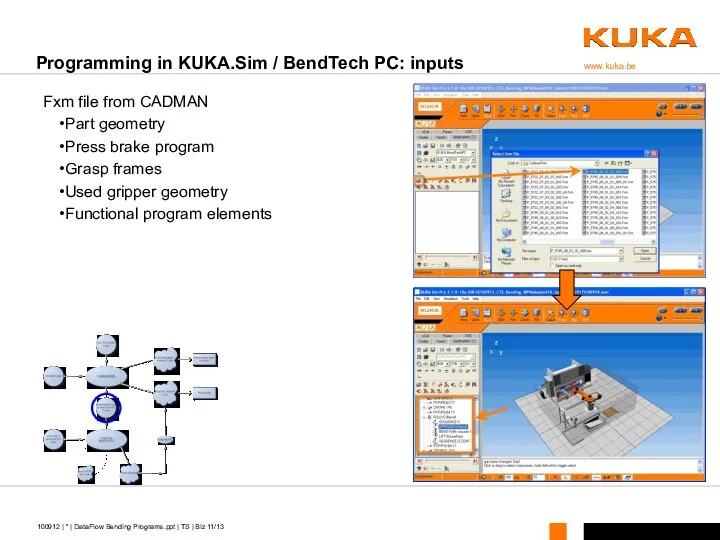
Fxm file from CADMAN
Part geometry
Press brake program
Grasp frames
Used gripper geometry
Functional program
Fxm file from CADMAN
Part geometry
Press brake program
Grasp frames
Used gripper geometry
Functional program
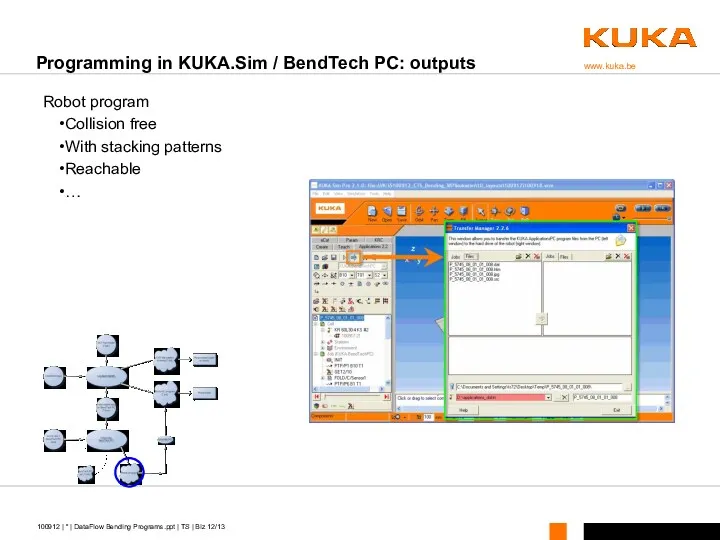
Robot program
Collision free
With stacking patterns
Reachable
…
Programming in KUKA.Sim / BendTech PC: outputs
Robot program
Collision free
With stacking patterns
Reachable
…
Programming in KUKA.Sim / BendTech PC: outputs
 Labor Dynamics of the IT Economy. What IT Planners Need to Know about the Nature of Programming
Labor Dynamics of the IT Economy. What IT Planners Need to Know about the Nature of Programming Признаки объектов
Признаки объектов Обработка информации. Получение новой информации. 5 класс.
Обработка информации. Получение новой информации. 5 класс. Количественные параметры информационных объектов
Количественные параметры информационных объектов Поколения ЭВМ
Поколения ЭВМ Относительные, абсолютные и смешанные ссылки. 9 класс
Относительные, абсолютные и смешанные ссылки. 9 класс Условия и циклы языка ABAP
Условия и циклы языка ABAP Авантелеком - Цифровая платформа управления коммуникациями для государственных и муниципальных унитарных предприятий
Авантелеком - Цифровая платформа управления коммуникациями для государственных и муниципальных унитарных предприятий Путешествие в страну Инфознайка
Путешествие в страну Инфознайка Virtual reality
Virtual reality Презентация СAD-CAM-CAE-системы-назначение, виды, история
Презентация СAD-CAM-CAE-системы-назначение, виды, история Урок информатики Виды компьютерной графики
Урок информатики Виды компьютерной графики Развитие вычислительной техники и архитектура
Развитие вычислительной техники и архитектура CSS. Источники информации. Подключение CSS к HTML. Таблицы стилей для различных устройств просмотра. Селекторы и комбинаторы
CSS. Источники информации. Подключение CSS к HTML. Таблицы стилей для различных устройств просмотра. Селекторы и комбинаторы Моделирование на UML. Определение UML. Лекция 1
Моделирование на UML. Определение UML. Лекция 1 Программирование на языке Паскаль. Ветвления
Программирование на языке Паскаль. Ветвления Архивы, библиотеки, музеи в глобальной информационной среде
Архивы, библиотеки, музеи в глобальной информационной среде Развитие пошаговых стратегий
Развитие пошаговых стратегий Синхронизация. Критические секции (Critical section)
Синхронизация. Критические секции (Critical section) Разработка технологических карт уроков
Разработка технологических карт уроков Информационно - коммуникативные технологии в современной начальной школе.Презентация.
Информационно - коммуникативные технологии в современной начальной школе.Презентация. Базові засоби розробки і оформлення програм на мові Pascal
Базові засоби розробки і оформлення програм на мові Pascal Теоретические основы монтажа. Создание проекта в Adobe Premiere Pro
Теоретические основы монтажа. Создание проекта в Adobe Premiere Pro Основы программирования на Python
Основы программирования на Python Умный дом. Преимущества и возможности
Умный дом. Преимущества и возможности Решение задач. Basic
Решение задач. Basic Понятие информационного метода. Понятие информационного процесса
Понятие информационного метода. Понятие информационного процесса Principles of Testing
Principles of Testing