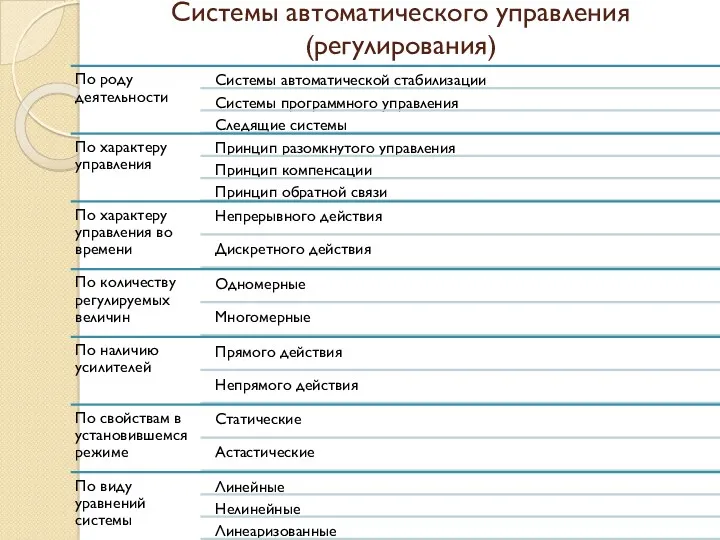
- Классификация САР

Содержание
- 2. Системы автоматического управления (регулирования)
- 3. По роду деятельности Системы стабилизации, или автоматического регулирования, характеризуются неизменностью задающего воздействия G=g(t)=const. Задача таких систем
- 4. По характеру управления Принцип разомкнутого управления. Сущность принципа состоит в том, что алгоритм управления строится только
- 5. Принцип компенсации (управление по возмущению). Применяется если возмущающий фактор искажает выходную величину до недопустимых пределов. Пусть
- 6. Принцип обратной связи. Здесь управляющее воздействие корректируется в зависимости от выходной величины y(t), независимо от действующих
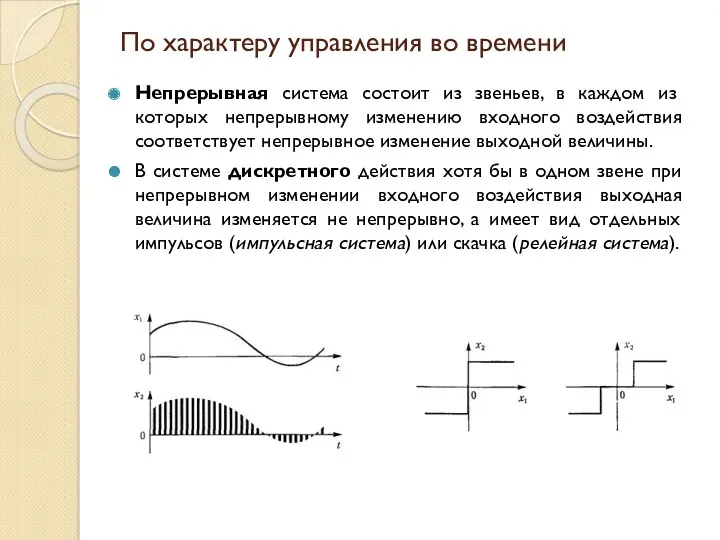
- 7. По характеру управления во времени Непрерывная система состоит из звеньев, в каждом из которых непрерывному изменению
- 8. По количеству регулируемых величин Разделение на данном уровне классификации производится по числу выходных координат объекта управления.
- 9. По свойствам в установившемся режиме Режим работы САУ, в котором управляемая величина и все промежуточные величины
- 11. Скачать презентацию
Системы автоматического управления (регулирования)
Системы автоматического управления (регулирования)
По роду деятельности
Системы стабилизации, или автоматического регулирования, характеризуются неизменностью задающего воздействия
По роду деятельности
Системы стабилизации, или автоматического регулирования, характеризуются неизменностью задающего воздействия
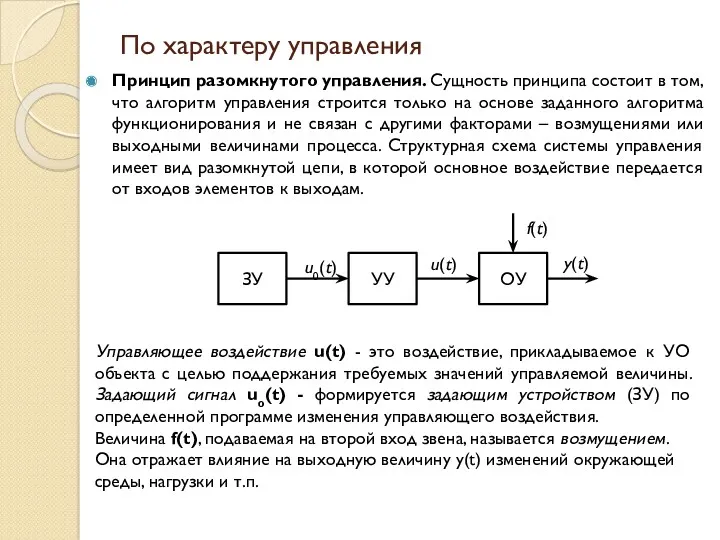
По характеру управления
Принцип разомкнутого управления. Сущность принципа состоит в том, что
По характеру управления
Принцип разомкнутого управления. Сущность принципа состоит в том, что
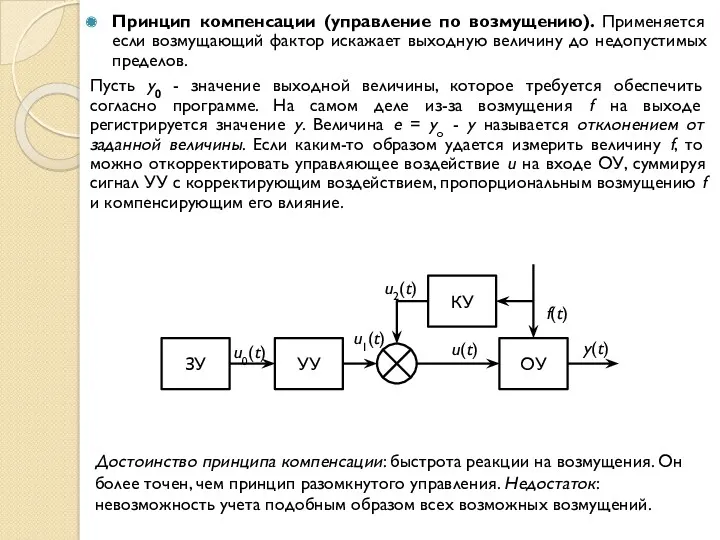
Принцип компенсации (управление по возмущению). Применяется если возмущающий фактор искажает выходную
Принцип компенсации (управление по возмущению). Применяется если возмущающий фактор искажает выходную
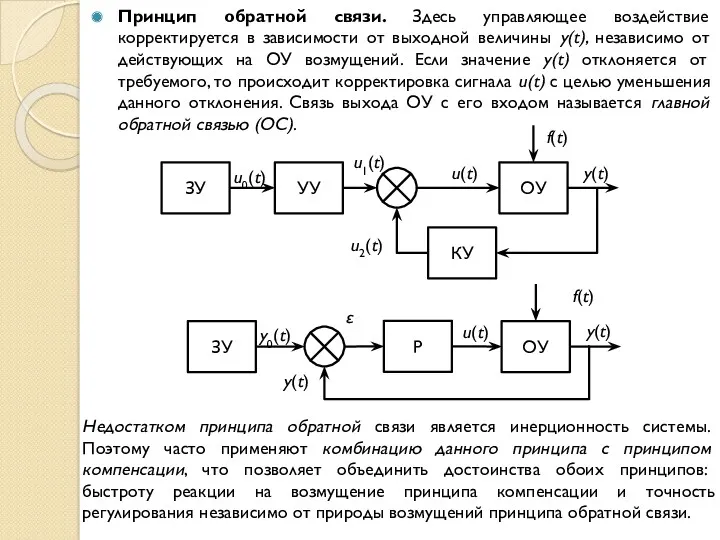
Принцип обратной связи. Здесь управляющее воздействие корректируется в зависимости от выходной
Принцип обратной связи. Здесь управляющее воздействие корректируется в зависимости от выходной
По характеру управления во времени
Непрерывная система состоит из звеньев, в
По характеру управления во времени
Непрерывная система состоит из звеньев, в
По количеству регулируемых величин
Разделение на данном уровне классификации производится по
По количеству регулируемых величин
Разделение на данном уровне классификации производится по
По свойствам в установившемся режиме
Режим работы САУ, в котором управляемая величина
По свойствам в установившемся режиме
Режим работы САУ, в котором управляемая величина
 Software Operating Systems
Software Operating Systems Пользовательские типы данных
Пользовательские типы данных Мир на экране: здесь и сейчас! Информационная и художественная природа телевизионного изображения
Мир на экране: здесь и сейчас! Информационная и художественная природа телевизионного изображения Retrieving WEP Keys From Road-Warriors
Retrieving WEP Keys From Road-Warriors Microsoft Word Работа с объектами
Microsoft Word Работа с объектами Программное обеспечение информационных систем
Программное обеспечение информационных систем Информационные технологии. Введение в ИТ
Информационные технологии. Введение в ИТ Component Enabler for .NET. Introduction to Component Enabler for .NET
Component Enabler for .NET. Introduction to Component Enabler for .NET Создание и использование собственных модулей
Создание и использование собственных модулей Мобільні операційні системи
Мобільні операційні системи Світові тенденції розвитку засобів телекомунікації та їх стан в Україні
Світові тенденції розвитку засобів телекомунікації та їх стан в Україні Правила сетевого этикета
Правила сетевого этикета Фон сайта
Фон сайта Разработка web-сайта для Администрации х. Спорный
Разработка web-сайта для Администрации х. Спорный Язык программирования Pascal. Сортировка массива
Язык программирования Pascal. Сортировка массива Кодирование источника сообщений
Кодирование источника сообщений Киберспорт. Подходящие игры для киберспорта
Киберспорт. Подходящие игры для киберспорта Форумы
Форумы Компьютерная сеть интернет. IP-адрес компьютера
Компьютерная сеть интернет. IP-адрес компьютера Назначение и возможности языка PHP. Переменные, константы и типы данных РНР. Лекция №1
Назначение и возможности языка PHP. Переменные, константы и типы данных РНР. Лекция №1 Электронная книга. Лекция 5
Электронная книга. Лекция 5 Создание сайта для предприятия
Создание сайта для предприятия Основы WEB. HTML формы
Основы WEB. HTML формы Графы. Виды (примеры) графов
Графы. Виды (примеры) графов Угрозы информационной безопасности и условия ее правового обеспечения
Угрозы информационной безопасности и условия ее правового обеспечения Установка и конфигурирование САДа
Установка и конфигурирование САДа Текстовый редактор Word. Ввод и редактирование текста
Текстовый редактор Word. Ввод и редактирование текста Индивидуальные качественные методы. Глубинное интервью
Индивидуальные качественные методы. Глубинное интервью