- Моделирование систем автоматического управления

Содержание
- 2. 1. Моделирование систем автоматического правления Введение Сложность современных объектов проектирования, особенно систем автоматического управления (САУ), постоянное
- 3. Общие понятия и определения Важнейшими требованиями к любой модели являются ее адекватность изучаемому объекту в рамках
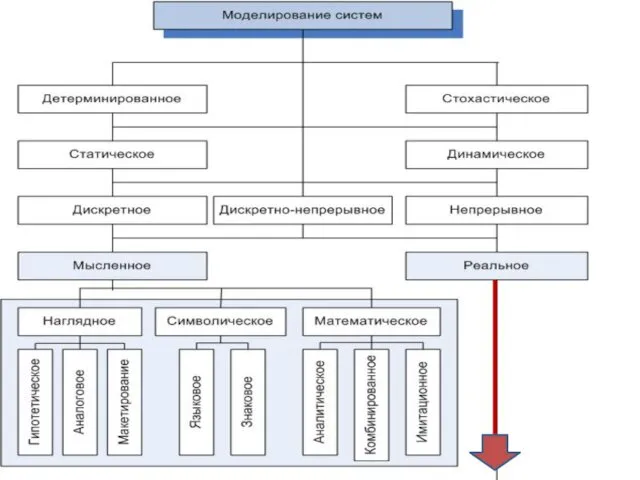
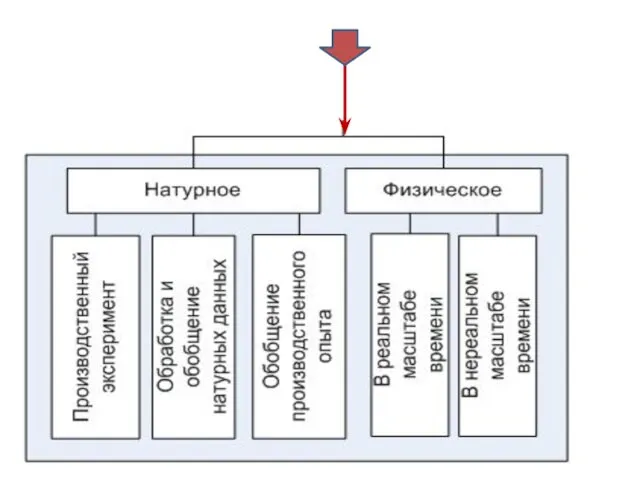
- 4. 1. Классификация методов моделирования
- 7. 2. Методы моделирования и их применение при синтезе и анализе сложных систем • Объекты считаются подобными,
- 8. Существуют различные методы моделирования: геометрическое и физическое моделирование, моделирование путем прямых аналогий, математическое моделирование на аналоговых
- 9. Эти правила и условия формулируются в теории подобия В состав САПР САУ вводятся: моделирование на ЭВМ
- 10. Математическое моделирование САУ на АВМ и ЦВМ Математическое моделирование САУ осуществляется на АВМ и ЦВМ, поэтому
- 11. Имитационное моделирование В математическом моделировании выделяют имитационное моделирование, под которым понимается воспроизведение процессов, объектов, явлений с
- 12. Полунатурное моделирование Под полунатурным моделированием (моделированием с реальной аппаратурой) понимают исследование элементов реальной аппаратуры совместно с
- 13. Математическое моделирование Математическое моделирование динамики САУ позволяет значительно уменьшить объемы макетных испытаний и осуществить: решение таких
- 14. оценки устойчивости, динамических и статических ошибок для различных значений параметров выбранной структурной схемы и возмущающих воздействии.
- 15. 3. Пример моделирования САУ программным методом. Рассмотрим пример моделирования САУ, структурная схема которой имеет вид: -
- 16. ГДЕ:
- 17. Пусть в устройстве управления УУ формируется управляющее воздействие U(t) вида: Пропорциональная , Интегральная Дифференциальная
- 18. Объект управления – инерционное звено первого порядка с самовыравниванием и запаздыванием (ИНТ) Знать: моделирование дифференциальной и
- 19. Моделирование инерционного объекта. Пусть необходимо оценить динамику системы управления при воздействии единичных координатных возмущений f(t) и
- 20. Моделирование звена запаздывания Введем одномерный массив YR [N1] размерностью N1 элементов. где Y=YR(J)
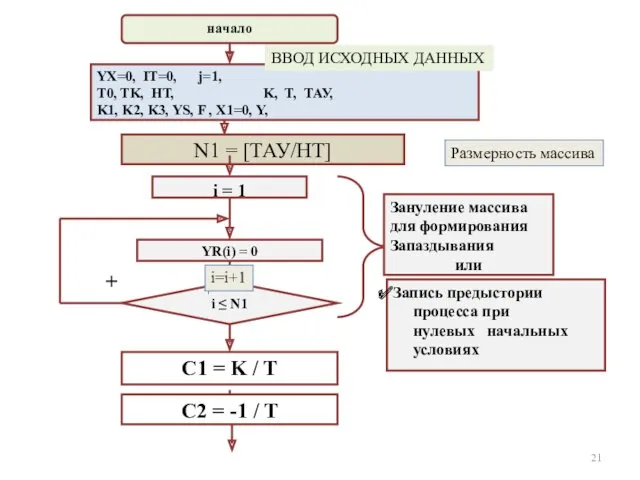
- 21. + i=i+1 Размерность массива ВВОД ИСХОДНЫХ ДАННЫХ +
- 22. ХР=Х1 ошибка Х2-производная интеграл Управляющее воздействие Метод ЭЙЛЕРА Предыдущее значение ошибки
- 24. Скачать презентацию
1. Моделирование систем автоматического правления
Введение
Сложность современных объектов проектирования, особенно систем
1. Моделирование систем автоматического правления
Введение
Сложность современных объектов проектирования, особенно систем
Общие понятия и определения
Важнейшими требованиями к любой модели являются ее адекватность
Общие понятия и определения
Важнейшими требованиями к любой модели являются ее адекватность

1. Классификация методов моделирования
1. Классификация методов моделирования
2. Методы моделирования и их применение при синтезе и анализе сложных
2. Методы моделирования и их применение при синтезе и анализе сложных
Существуют различные методы моделирования: геометрическое и физическое моделирование, моделирование путем
Существуют различные методы моделирования: геометрическое и физическое моделирование, моделирование путем
Эти правила и условия формулируются в теории подобия
В состав САПР САУ
Эти правила и условия формулируются в теории подобия
В состав САПР САУ
Математическое моделирование САУ на АВМ и ЦВМ
Математическое моделирование САУ осуществляется на
Математическое моделирование САУ на АВМ и ЦВМ
Математическое моделирование САУ осуществляется на
Имитационное моделирование
В математическом моделировании выделяют имитационное моделирование, под которым понимается
Имитационное моделирование
В математическом моделировании выделяют имитационное моделирование, под которым понимается
Полунатурное моделирование
Под полунатурным моделированием (моделированием с реальной аппаратурой) понимают исследование элементов
Полунатурное моделирование
Под полунатурным моделированием (моделированием с реальной аппаратурой) понимают исследование элементов
Математическое моделирование
Математическое моделирование динамики САУ позволяет значительно уменьшить объемы макетных испытаний
Математическое моделирование
Математическое моделирование динамики САУ позволяет значительно уменьшить объемы макетных испытаний
оценки устойчивости, динамических и статических ошибок для различных значений параметров выбранной
оценки устойчивости, динамических и статических ошибок для различных значений параметров выбранной
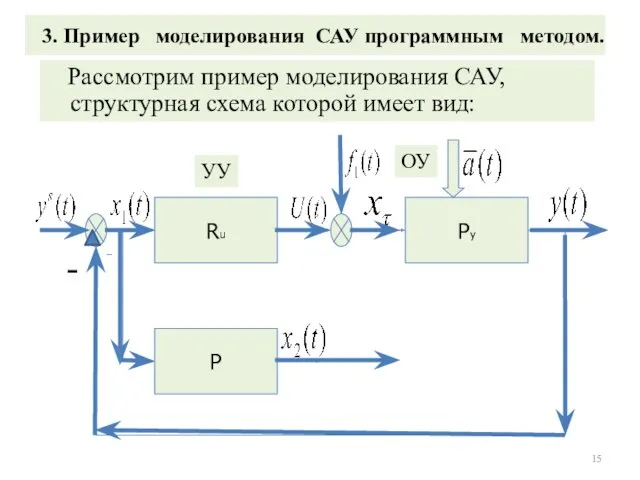
3. Пример моделирования САУ программным методом.
Рассмотрим пример моделирования САУ, структурная
3. Пример моделирования САУ программным методом.
Рассмотрим пример моделирования САУ, структурная
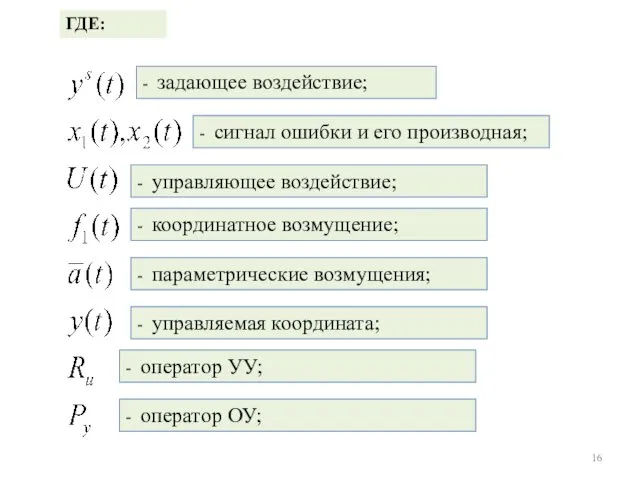
ГДЕ:
ГДЕ:
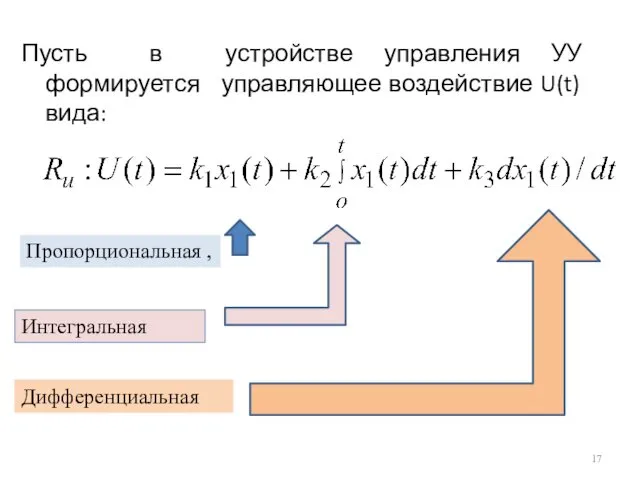
Пусть в устройстве управления УУ формируется управляющее воздействие U(t) вида:
Пропорциональная ,
Интегральная
Дифференциальная
Пусть в устройстве управления УУ формируется управляющее воздействие U(t) вида:
Пропорциональная ,
Интегральная
Дифференциальная
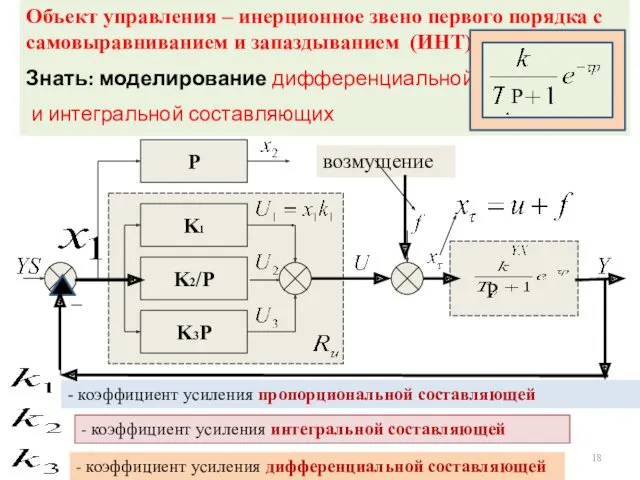
Объект управления – инерционное звено первого порядка с самовыравниванием и запаздыванием
Объект управления – инерционное звено первого порядка с самовыравниванием и запаздыванием
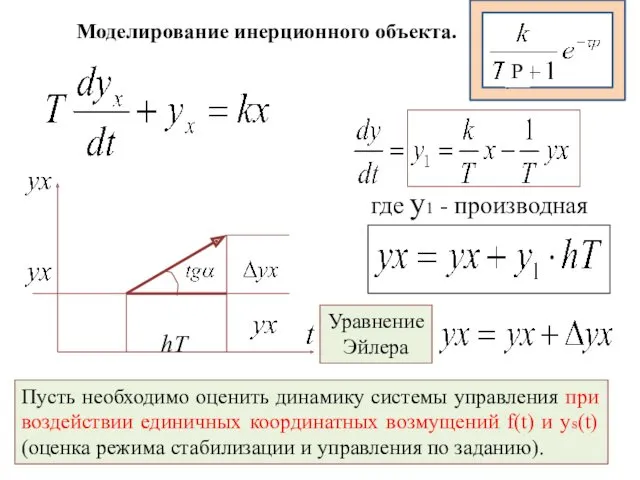
Моделирование инерционного объекта.
Пусть необходимо оценить динамику системы управления при воздействии единичных
Моделирование инерционного объекта.
Пусть необходимо оценить динамику системы управления при воздействии единичных
![Моделирование звена запаздывания Введем одномерный массив YR [N1] размерностью N1 элементов. где Y=YR(J)](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/107479/slide-19.jpg)
Моделирование звена запаздывания
Введем одномерный массив YR [N1] размерностью N1 элементов.
где
Y=YR(J)
Моделирование звена запаздывания
Введем одномерный массив YR [N1] размерностью N1 элементов.
где
Y=YR(J)
+
i=i+1
Размерность массива
ВВОД ИСХОДНЫХ ДАННЫХ
+
+
i=i+1
Размерность массива
ВВОД ИСХОДНЫХ ДАННЫХ
+
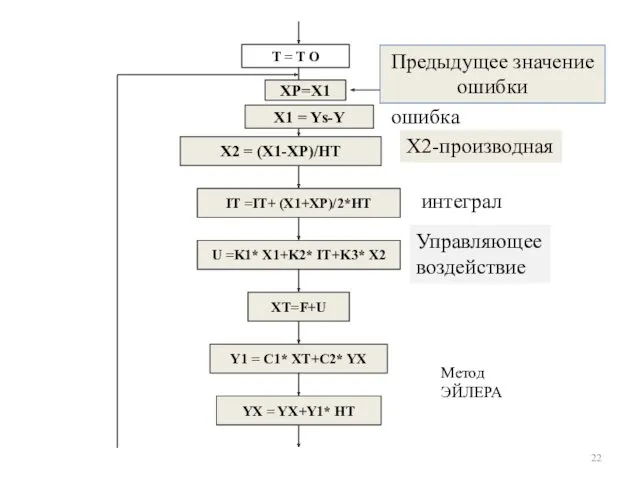
ХР=Х1
ошибка
Х2-производная
интеграл
Управляющее
воздействие
Метод ЭЙЛЕРА
Предыдущее значение ошибки
ХР=Х1
ошибка
Х2-производная
интеграл
Управляющее
воздействие
Метод ЭЙЛЕРА
Предыдущее значение ошибки
 Технология ATM, Fire Wire. Беспроводные технологии. Лекция №6
Технология ATM, Fire Wire. Беспроводные технологии. Лекция №6 OpenCascade Modeling Library. Введение
OpenCascade Modeling Library. Введение EMUI. Создан для ИИ, обладает бесконечными возможностями
EMUI. Создан для ИИ, обладает бесконечными возможностями Анализ современных требований по обеспечению информационной безопасности телекоммуникационных систем цифровой железной дороги
Анализ современных требований по обеспечению информационной безопасности телекоммуникационных систем цифровой железной дороги Создание видеоклипа из цифровых фотографий
Создание видеоклипа из цифровых фотографий Использование ИКТ и интерактивных средств обучения в работе учителя-предметника и классного руководителя
Использование ИКТ и интерактивных средств обучения в работе учителя-предметника и классного руководителя Введение в разработку приложений на VBA. (Тема 6)
Введение в разработку приложений на VBA. (Тема 6) Управление складом
Управление складом Разбор задач школьного тура 1-4
Разбор задач школьного тура 1-4 Понятие алгоритма, способы описания, свойства и типы алгоритмов
Понятие алгоритма, способы описания, свойства и типы алгоритмов Работа с формулами в текстовом редакторе WORD
Работа с формулами в текстовом редакторе WORD Web-сервіси. Створення і розгортання простого веб-сервісу та клієнта
Web-сервіси. Створення і розгортання простого веб-сервісу та клієнта Компьютерлік модель. Компьютерде модельдерді зерттеу
Компьютерлік модель. Компьютерде модельдерді зерттеу Создание комплексной автоматизированной системы управления. Ит в полиции
Создание комплексной автоматизированной системы управления. Ит в полиции Тема урока: Алфавитный подход к определению количества информации. Единицы измерения информации. 8 класс
Тема урока: Алфавитный подход к определению количества информации. Единицы измерения информации. 8 класс Как зарегистрироваться на сайте Навигатор дополнительного образования
Как зарегистрироваться на сайте Навигатор дополнительного образования Ввод и вывод данных в программах на языке Python
Ввод и вывод данных в программах на языке Python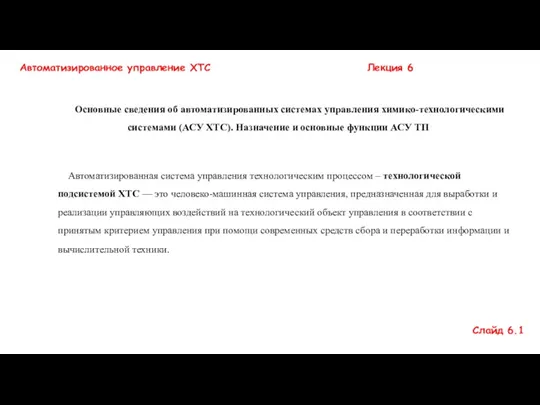 Основные сведения об автоматизированных системах управления химикотехнологическими системами. Назначение и основные функции
Основные сведения об автоматизированных системах управления химикотехнологическими системами. Назначение и основные функции Камешки. Правила игры
Камешки. Правила игры Проект Социальные страницы ВКонтакте великих людей
Проект Социальные страницы ВКонтакте великих людей ЕГЭ по информатике теория
ЕГЭ по информатике теория Основы алгоритмизации и программирование
Основы алгоритмизации и программирование Представление целых и вещественных чисел
Представление целых и вещественных чисел Техника отладки драйверов
Техника отладки драйверов Introduction to the course. Managing the application life cycle
Introduction to the course. Managing the application life cycle Поддержка офлайна в мобильном приложении
Поддержка офлайна в мобильном приложении Использование ИКТ на уроках и во внеурочной деятельности по географии
Использование ИКТ на уроках и во внеурочной деятельности по географии Единицы измерения информации. Перевод единиц измерения
Единицы измерения информации. Перевод единиц измерения