- Моделирование цифровых систем управления самолетом

Содержание
- 2. Содержание Структурная схема цифровой системы управления автопилотом самолета с учетом нелинейных составляющих. Схема сборки имитационной модели
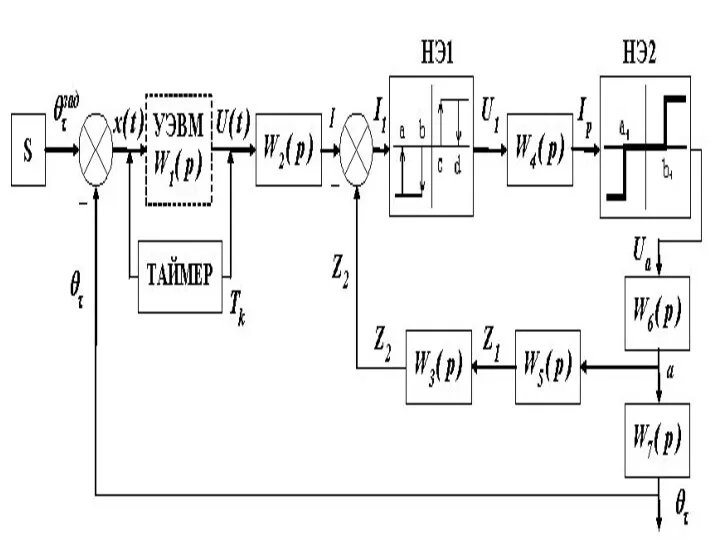
- 3. Рассмотрим структурную схему цифровой системы управления автопилотом самолета с учетом нелинейных составляющих. БОРТОВАЯ УПРАВЛЯЮЩАЯ ЭВМ Местная
- 4. ВЕРСИЯ 2018
- 5. Система управления содержит задатчик курса S, формирующий заданное значение курса самолета Qзадг . Блок сравнения формирует
- 6. интервале квантования Тк, где U(t) – управляющее воздействие на исполнительные устройства самолета. Таймер УЭВМ с интервалом
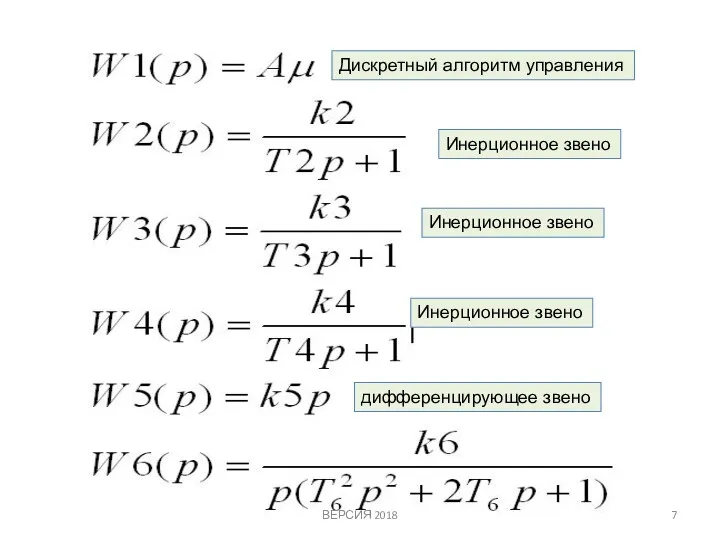
- 7. ВЕРСИЯ 2018 Дискретный алгоритм управления Инерционное звено Инерционное звено Инерционное звено дифференцирующее звено
- 8. При программировании реальной модели системы необходимо моделировать линейную часть системы (инерционные звенья), например, методом Эйлера или
- 9. Схема сборки ИМ. ЦАП ВЕРСИЯ 2018
- 10. Второй вариант сборки модели ВЕРСИЯ 2018 QG QG ПИД QGZ
- 11. 3. Цифровые регуляторы В непрерывных системах широко используются PID-регуляторы, которые представляются идеализированным уравнением: где: KP -
- 12. Для малых периодов дискретизации Tц (ИНТЕРВАЛА КВАНТОВАНИЯ) уравнение может быть преобразовано в разностное без существенной потери
- 13. В результате получен нерекуррентный (позиционный) алгоритм управления, который требует сохранения всех предыдущих значений сигнала ошибки x[i],
- 14. ВЕРСИЯ 2018 РЕКУРЕНТНЫЙ ПИД АЛГОРИТМ ДЛЯ РЕАЛИЗАЦИИ НА УВМ ПРИРАЩЕНИЕ УПРАВЛЕНИЯ
- 15. ОПТИМИЗАЦИЯ РЕЖИМА СТАБИЛИЗАЦИИ ВЕРСИЯ 2018 ОТКЛОНЕНИЕ ОТ КУРСА при координатных возмущениях ВРЕМЯ СЕК ОПТИМАЛЬНЫЙ ПРОЦЕСС БЕЗ
- 16. ОПТИМИЗАЦИЯ РЕЖИМА СТАБИЛИЗАЦИИ ВЕРСИЯ 2018 Х2- ПРОИЗВОДНАЯ Х1- ОШИБКА ФАЗОВЫЙ ПОРТРЕТ ОПТИМАЛЬНЫЙ
- 17. Использование рекуррентного алгоритма для расчёта управляющего воздействия ВЕРСИЯ 2018
- 18. ВЕРСИЯ 2018
- 19. Управление – это прежде всего информационный процесс, предполагающий выполнение функций сбора, обработки и анализа информации, её
- 20. Обобщённая схема системы управления ВЕРСИЯ 2018 ЛПР - лицо принимающее решения
- 21. Функциональная схема системы управления ВЕРСИЯ 2018
- 22. Управляющих ЭВМ и комплексы Управляющих ЭВМ и комплексы - это программно- технические комплексы (ПТК), включающие в
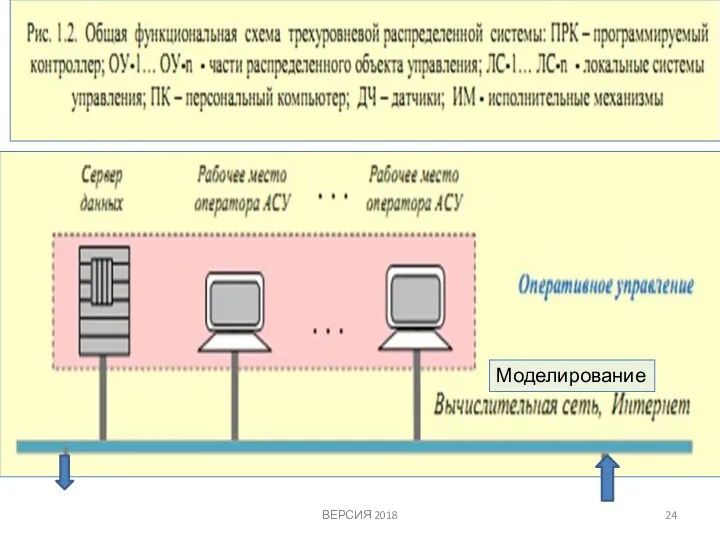
- 23. Программно-технические комплексы (ПТК) Выше было отмечено, что при разработке логико-вычислительных управляющих средств необходимо опираться на современные
- 24. ВЕРСИЯ 2018 Моделирование
- 25. Первый и второй уровни ВЕРСИЯ 2018 Моделирование
- 27. Скачать презентацию
Содержание
Структурная схема цифровой системы управления автопилотом самолета с учетом нелинейных составляющих.
Содержание
Структурная схема цифровой системы управления автопилотом самолета с учетом нелинейных составляющих.
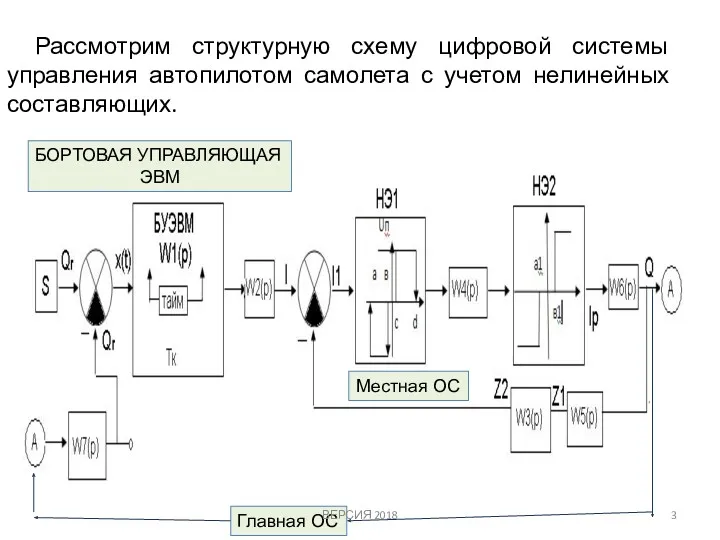
Рассмотрим структурную схему цифровой системы управления автопилотом самолета с учетом нелинейных
Рассмотрим структурную схему цифровой системы управления автопилотом самолета с учетом нелинейных
ВЕРСИЯ 2018
ВЕРСИЯ 2018
Система управления содержит задатчик курса S, формирующий заданное значение курса самолета
Система управления содержит задатчик курса S, формирующий заданное значение курса самолета
интервале квантования Тк, где U(t) – управляющее воздействие на исполнительные устройства
интервале квантования Тк, где U(t) – управляющее воздействие на исполнительные устройства
ВЕРСИЯ 2018
Дискретный алгоритм управления
Инерционное звено
Инерционное звено
Инерционное звено
дифференцирующее звено
ВЕРСИЯ 2018
Дискретный алгоритм управления
Инерционное звено
Инерционное звено
Инерционное звено
дифференцирующее звено
При программировании реальной модели системы необходимо моделировать линейную часть системы (инерционные
При программировании реальной модели системы необходимо моделировать линейную часть системы (инерционные
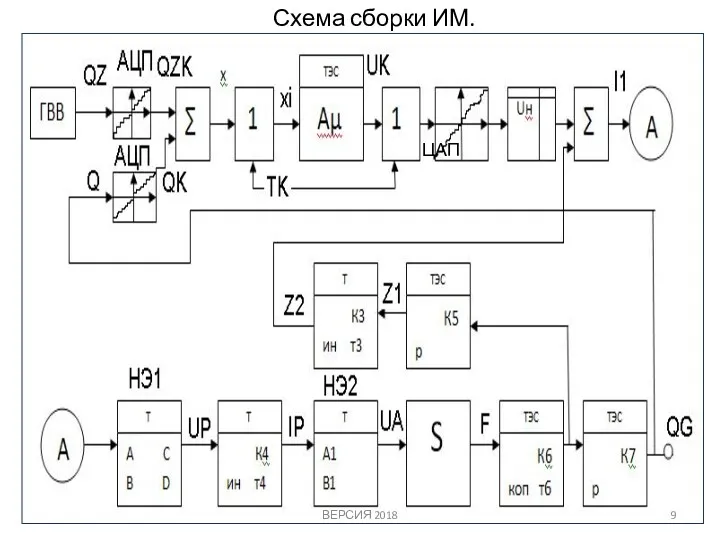
Схема сборки ИМ.
ЦАП
ВЕРСИЯ 2018
Схема сборки ИМ.
ЦАП
ВЕРСИЯ 2018
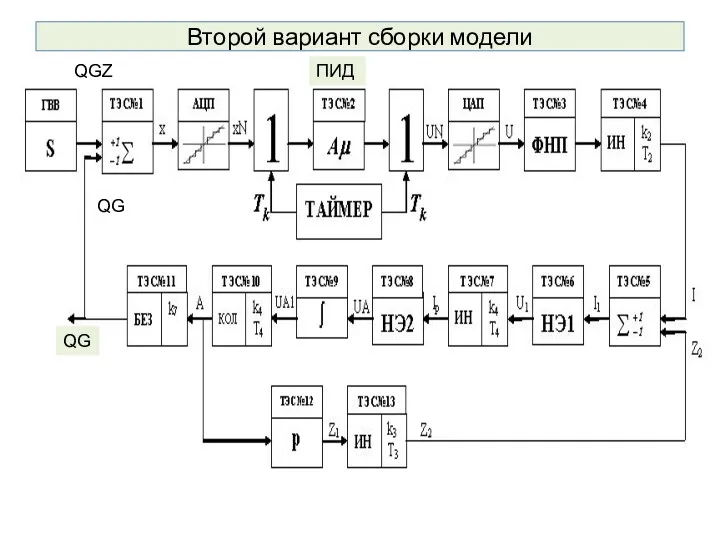
Второй вариант сборки модели
ВЕРСИЯ 2018
QG
QG
ПИД
QGZ
Второй вариант сборки модели
ВЕРСИЯ 2018
QG
QG
ПИД
QGZ
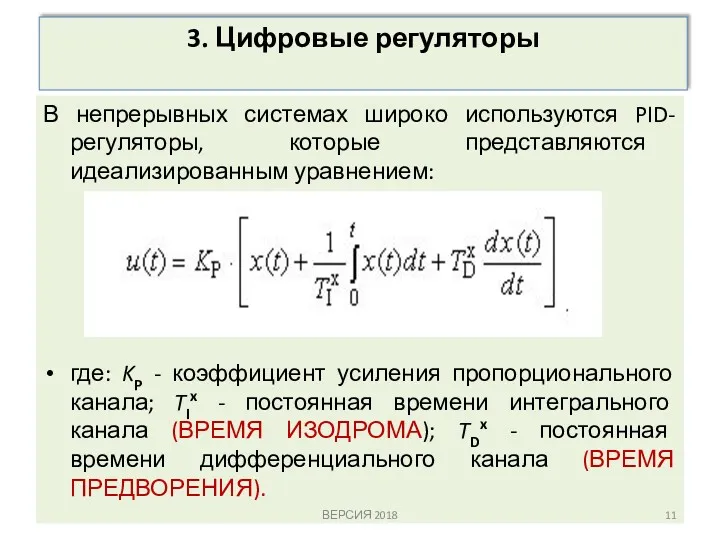
3. Цифровые регуляторы
В непрерывных системах широко используются PID-регуляторы, которые представляются идеализированным
3. Цифровые регуляторы
В непрерывных системах широко используются PID-регуляторы, которые представляются идеализированным
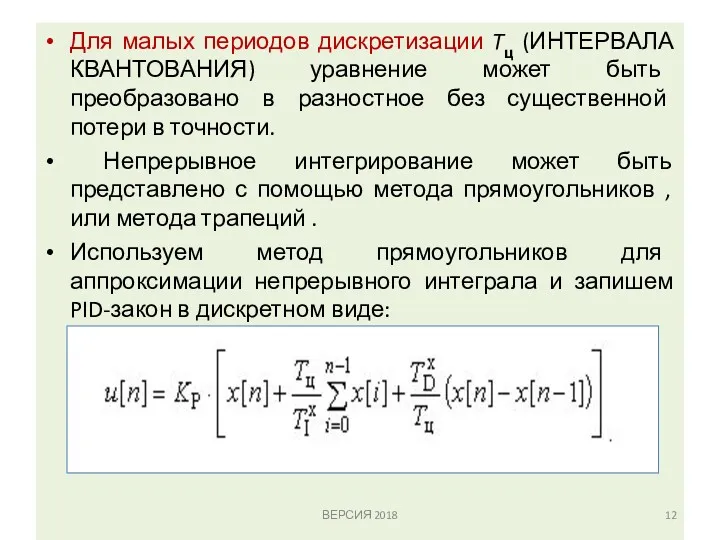
Для малых периодов дискретизации Tц (ИНТЕРВАЛА КВАНТОВАНИЯ) уравнение может быть преобразовано
Для малых периодов дискретизации Tц (ИНТЕРВАЛА КВАНТОВАНИЯ) уравнение может быть преобразовано

В результате получен нерекуррентный (позиционный) алгоритм управления, который требует сохранения всех
В результате получен нерекуррентный (позиционный) алгоритм управления, который требует сохранения всех
ВЕРСИЯ 2018
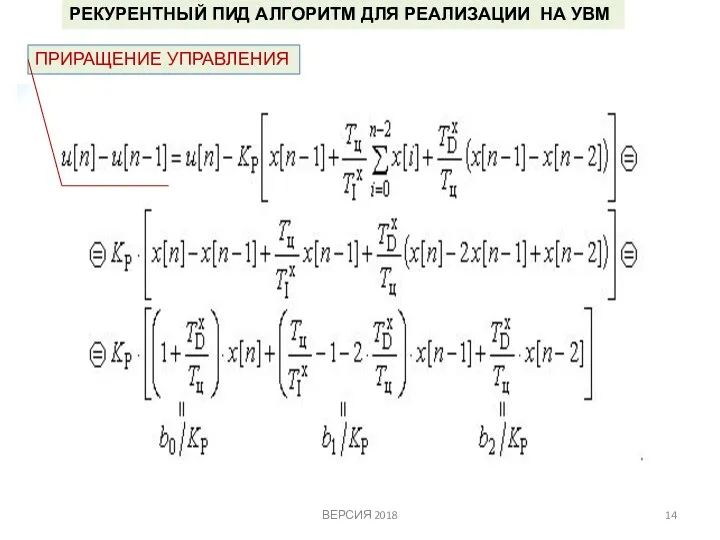
РЕКУРЕНТНЫЙ ПИД АЛГОРИТМ ДЛЯ РЕАЛИЗАЦИИ НА УВМ
ПРИРАЩЕНИЕ УПРАВЛЕНИЯ
ВЕРСИЯ 2018
РЕКУРЕНТНЫЙ ПИД АЛГОРИТМ ДЛЯ РЕАЛИЗАЦИИ НА УВМ
ПРИРАЩЕНИЕ УПРАВЛЕНИЯ
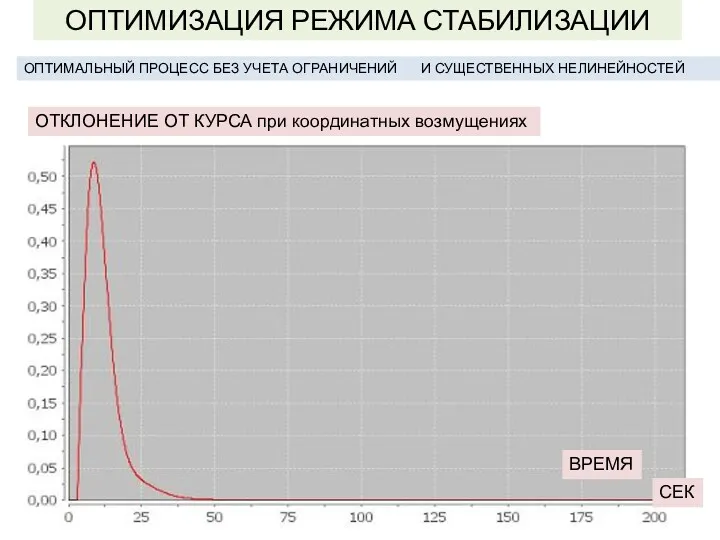
ОПТИМИЗАЦИЯ РЕЖИМА СТАБИЛИЗАЦИИ
ВЕРСИЯ 2018
ОТКЛОНЕНИЕ ОТ КУРСА при координатных возмущениях
ВРЕМЯ
СЕК
ОПТИМАЛЬНЫЙ ПРОЦЕСС БЕЗ
ОПТИМИЗАЦИЯ РЕЖИМА СТАБИЛИЗАЦИИ
ВЕРСИЯ 2018
ОТКЛОНЕНИЕ ОТ КУРСА при координатных возмущениях
ВРЕМЯ
СЕК
ОПТИМАЛЬНЫЙ ПРОЦЕСС БЕЗ
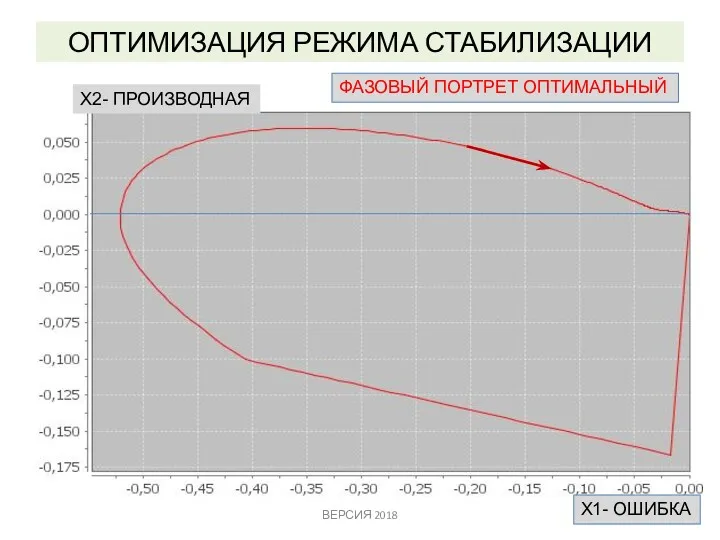
ОПТИМИЗАЦИЯ РЕЖИМА СТАБИЛИЗАЦИИ
ВЕРСИЯ 2018
Х2- ПРОИЗВОДНАЯ
Х1- ОШИБКА
ФАЗОВЫЙ ПОРТРЕТ ОПТИМАЛЬНЫЙ
ОПТИМИЗАЦИЯ РЕЖИМА СТАБИЛИЗАЦИИ
ВЕРСИЯ 2018
Х2- ПРОИЗВОДНАЯ
Х1- ОШИБКА
ФАЗОВЫЙ ПОРТРЕТ ОПТИМАЛЬНЫЙ
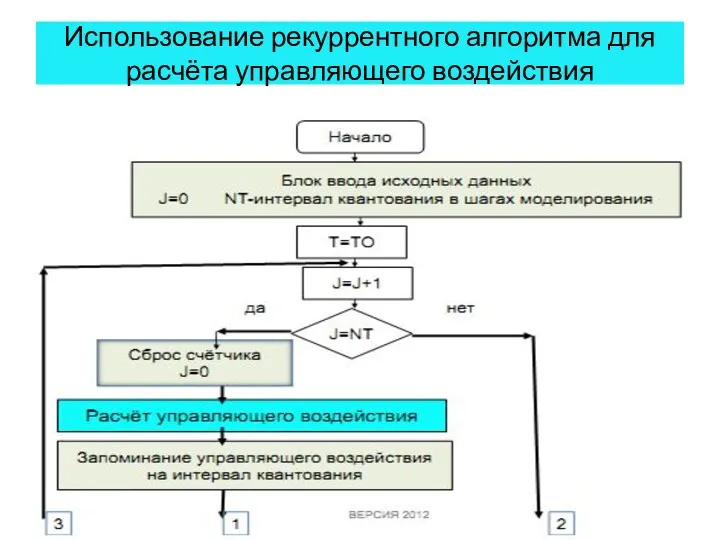
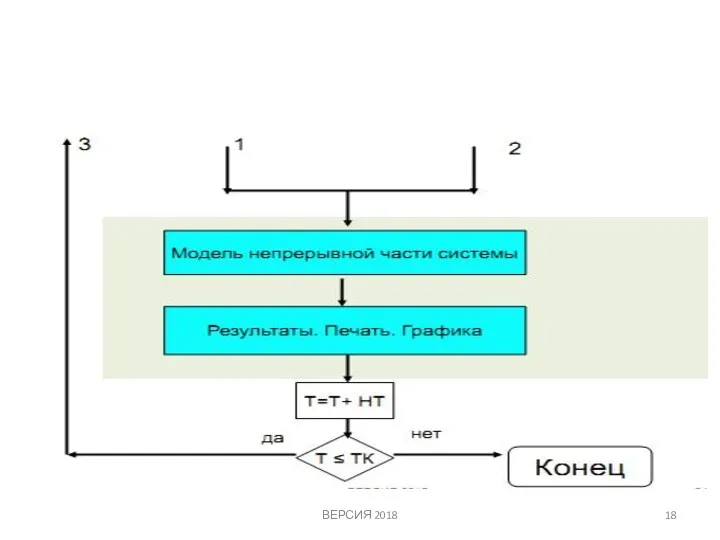
Использование рекуррентного алгоритма для расчёта управляющего воздействия
ВЕРСИЯ 2018
Использование рекуррентного алгоритма для расчёта управляющего воздействия
ВЕРСИЯ 2018
ВЕРСИЯ 2018
ВЕРСИЯ 2018
Управление – это прежде всего информационный процесс, предполагающий выполнение функций сбора,
Управление – это прежде всего информационный процесс, предполагающий выполнение функций сбора,
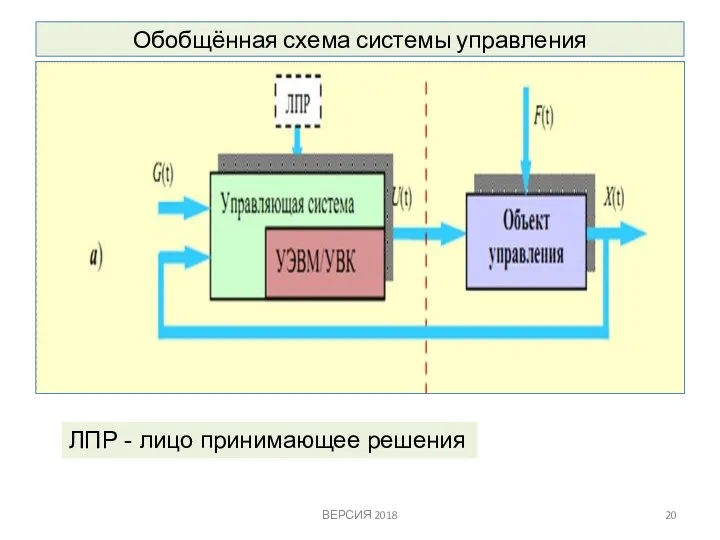
Обобщённая схема системы управления
ВЕРСИЯ 2018
ЛПР - лицо принимающее решения
Обобщённая схема системы управления
ВЕРСИЯ 2018
ЛПР - лицо принимающее решения

Функциональная схема системы управления
ВЕРСИЯ 2018
Функциональная схема системы управления
ВЕРСИЯ 2018
Управляющих ЭВМ и комплексы
Управляющих ЭВМ и комплексы - это программно- технические
Управляющих ЭВМ и комплексы
Управляющих ЭВМ и комплексы - это программно- технические
Программно-технические комплексы (ПТК)
Выше было отмечено, что при разработке логико-вычислительных управляющих
Программно-технические комплексы (ПТК)
Выше было отмечено, что при разработке логико-вычислительных управляющих
ВЕРСИЯ 2018
Моделирование
ВЕРСИЯ 2018
Моделирование
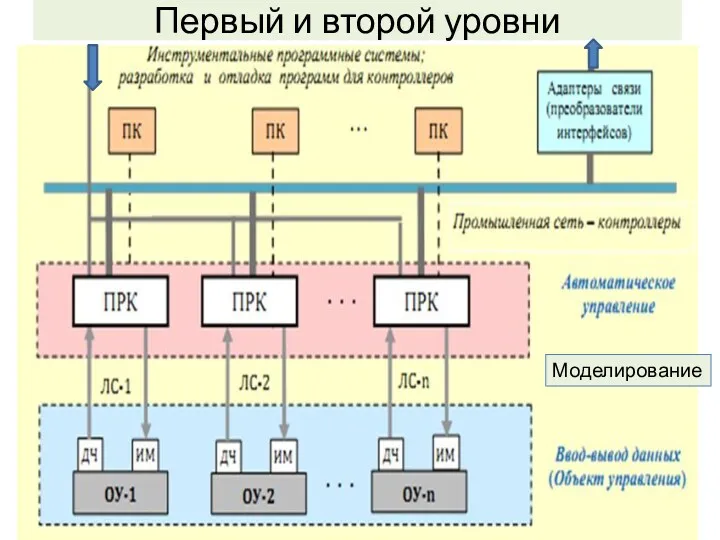
Первый и второй уровни
ВЕРСИЯ 2018
Моделирование
Первый и второй уровни
ВЕРСИЯ 2018
Моделирование
 Комп'ютерна програма Applet
Комп'ютерна програма Applet Локальная сеть
Локальная сеть Персональный компьютер. Компьютер как универсальное устройство для работы с информацией. Информатика. 7 класс
Персональный компьютер. Компьютер как универсальное устройство для работы с информацией. Информатика. 7 класс Виды баз данных
Виды баз данных Изкуствен интелект
Изкуствен интелект Линейные списки
Линейные списки Настройка локальной вычислительной сети и подключение к сети Интернет
Настройка локальной вычислительной сети и подключение к сети Интернет Технические средства телекоммуникационных технологий
Технические средства телекоммуникационных технологий Проектирование Базы данных
Проектирование Базы данных Сервисное обслуживание ПК и сети. Общие сетевые ресурсы. Резервное копирование
Сервисное обслуживание ПК и сети. Общие сетевые ресурсы. Резервное копирование ЕГЭ по информатике. Решение заданий С1.
ЕГЭ по информатике. Решение заданий С1. Технология программирования
Технология программирования Российские СПС Гарант и Консультант Плюс Лекция 15
Российские СПС Гарант и Консультант Плюс Лекция 15 Викторина Маленькие знатоки родного города
Викторина Маленькие знатоки родного города Мир информатики. Своя игра
Мир информатики. Своя игра Cписки и другие абстрактные типы данных. Лекция 8
Cписки и другие абстрактные типы данных. Лекция 8 Алгоритмы и программирование. Основные элементы блок-схем
Алгоритмы и программирование. Основные элементы блок-схем Знаю все. Изучайте предметы и другие науки там, где удобно
Знаю все. Изучайте предметы и другие науки там, где удобно Моделирование и формализация. Информация и информационные процессы
Моделирование и формализация. Информация и информационные процессы Яка небезпека очікує дітей в інтернеті
Яка небезпека очікує дітей в інтернеті Повторы в текстах
Повторы в текстах Транспортный уровень стека протоколов TCP/IP
Транспортный уровень стека протоколов TCP/IP Деловая игра Текстовый редактор MS WORD
Деловая игра Текстовый редактор MS WORD Параллельные архитектуры с распределённой памятью. Массивно-параллельные системы (MPP)
Параллельные архитектуры с распределённой памятью. Массивно-параллельные системы (MPP) Стандартизація та сертифікація інформаційних управляючих систем
Стандартизація та сертифікація інформаційних управляючих систем 9-2-1 (2)
9-2-1 (2) Публикация в международном издании
Публикация в международном издании Модули fw Bootstrap, и их предназначение. (Тема 14)
Модули fw Bootstrap, и их предназначение. (Тема 14)