- Імовірнісні ітеративні методи оптимізації

Содержание
- 2. Імовірнісні ітеративні методи оптимізації (продовження) Тоді умову оптимальності (2.2), з урахуванням (3.1) можна записати як (3.2)
- 3. Імовірнісні ітеративні методи оптимізації (продовження) Через це змінюються умови, які накладають на , щоб забезпечити збіжність.
- 4. Імовірнісні ітеративні методи оптимізації (продовження) У цьому випадку алгоритм (3.4) можна записати як (3.9) а пошуковий
- 5. Ітеративні методи оптимізації. Про правило зупинки При практичному використанні алгоритмів виникає питання, щодо кількості кроків ,
- 6. Розпізнавання. Загальні положення Проблема розпізнавання є загальною. В системному аналізі вона виникає в зв’язку з необхідністю
- 7. Розпізнавання. Загальні положення (продовження) Задача розпізнавання складається з віднесення об’єкту до одного з класів, найчастіше спочатку
- 8. Розпізнавання. Загальні положення (продовження) Позначимо функцію, яка розділює, (4.1) де - l- мірний вектор, який характеризує
- 10. Скачать презентацию
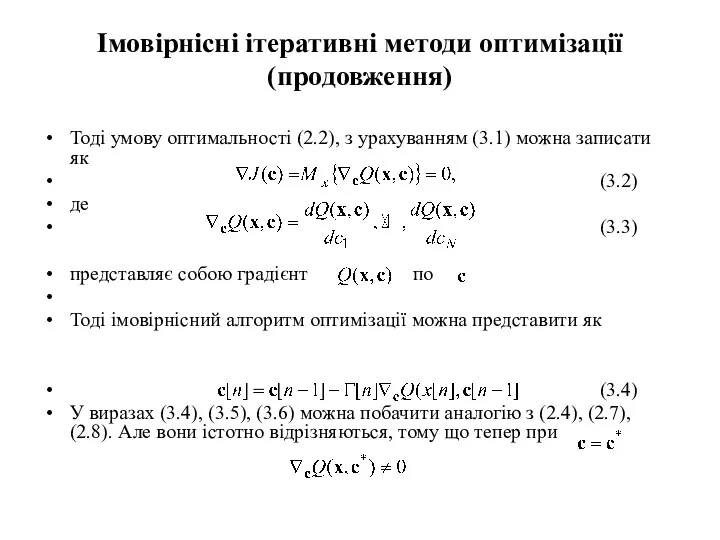
Імовірнісні ітеративні методи оптимізації (продовження)
Тоді умову оптимальності (2.2), з урахуванням (3.1)
Імовірнісні ітеративні методи оптимізації (продовження)
Тоді умову оптимальності (2.2), з урахуванням (3.1)
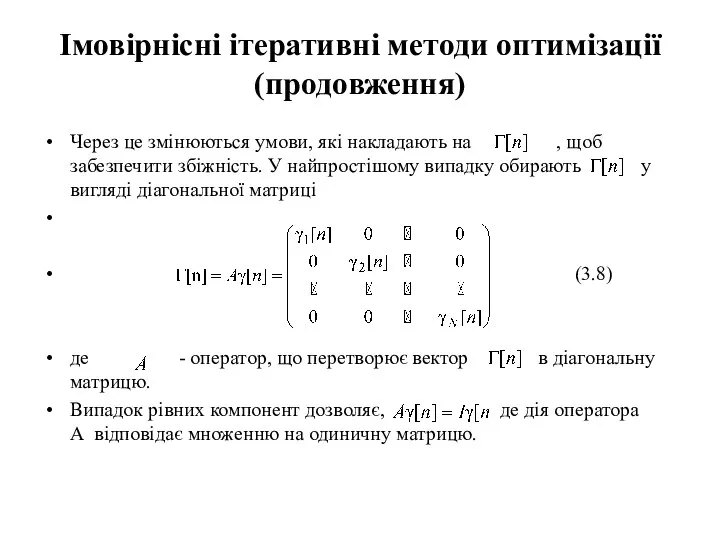
Імовірнісні ітеративні методи оптимізації (продовження)
Через це змінюються умови, які накладають на
Імовірнісні ітеративні методи оптимізації (продовження)
Через це змінюються умови, які накладають на
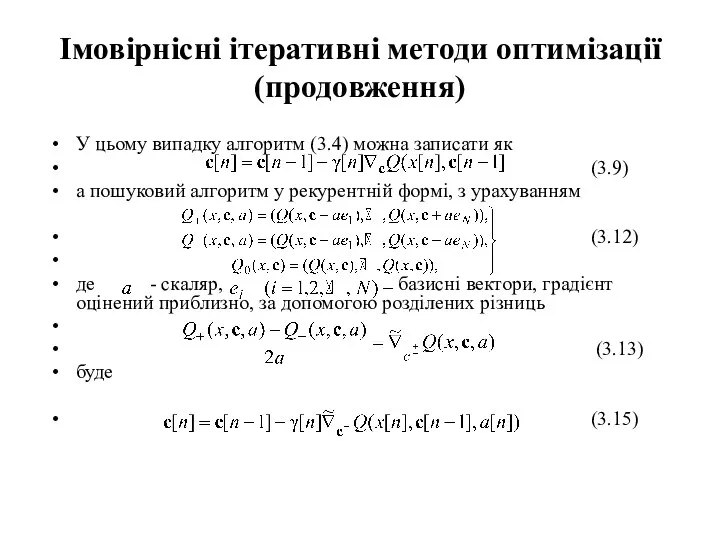
Імовірнісні ітеративні методи оптимізації (продовження)
У цьому випадку алгоритм (3.4) можна записати
Імовірнісні ітеративні методи оптимізації (продовження)
У цьому випадку алгоритм (3.4) можна записати
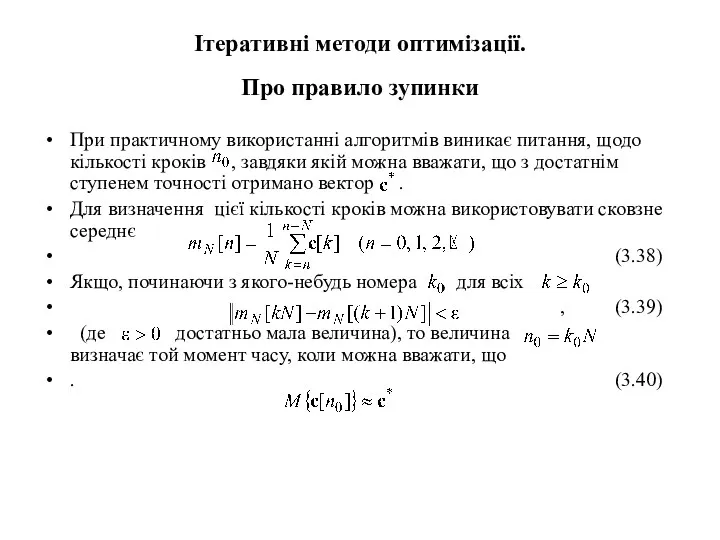
Ітеративні методи оптимізації.
Про правило зупинки
При практичному використанні алгоритмів виникає
Ітеративні методи оптимізації.
Про правило зупинки
При практичному використанні алгоритмів виникає
Розпізнавання. Загальні положення
Проблема розпізнавання є загальною. В системному аналізі вона виникає
Розпізнавання. Загальні положення
Проблема розпізнавання є загальною. В системному аналізі вона виникає
Розпізнавання.
Загальні положення (продовження)
Задача розпізнавання складається з віднесення об’єкту до одного
Розпізнавання.
Загальні положення (продовження)
Задача розпізнавання складається з віднесення об’єкту до одного
Розпізнавання.
Загальні положення (продовження)
Позначимо функцію, яка розділює, (4.1)
де - l- мірний
Розпізнавання.
Загальні положення (продовження)
Позначимо функцію, яка розділює, (4.1)
де - l- мірний
 Алгоритмы размещения конструктивных модулей различных уровней иерархии
Алгоритмы размещения конструктивных модулей различных уровней иерархии Управление проектами, международная практика. Этапы Внедрения Спайдер Проджект
Управление проектами, международная практика. Этапы Внедрения Спайдер Проджект Електричні виконавчі механізми. Відкрита лекція з дисципліни - Виконавчі механізми та регулюючі органи
Електричні виконавчі механізми. Відкрита лекція з дисципліни - Виконавчі механізми та регулюючі органи Презентация к уроку информатики Алгоритмы в нашей жизни
Презентация к уроку информатики Алгоритмы в нашей жизни Создание запросов
Создание запросов Виникнення Інтернету
Виникнення Інтернету Happy start .NET
Happy start .NET Игра Найди предмет
Игра Найди предмет Использование вложенных SQL-запросов
Использование вложенных SQL-запросов Алгоритм. Блок-схемы
Алгоритм. Блок-схемы Электронная очередь для многофункциональных центров. Система электронной очереди Эволента
Электронная очередь для многофункциональных центров. Система электронной очереди Эволента Информационный чат-бот универа
Информационный чат-бот универа Умение оценивать объёма памяти для хранения текстовых данных. ОГЭ - 5
Умение оценивать объёма памяти для хранения текстовых данных. ОГЭ - 5 Программирование на языке Паскаль. §54-61. 10 класс
Программирование на языке Паскаль. §54-61. 10 класс Операционная система Linux. Знакомство с операционной системой
Операционная система Linux. Знакомство с операционной системой Створення Web - блогу. Структура роботи
Створення Web - блогу. Структура роботи Редакция газеты
Редакция газеты История развития вычислительной техники
История развития вычислительной техники Моделирование сложных 3D-моделей с помощью 3D-редакторов по алгоритму. Основы трехмерного моделирования в Компас 3D
Моделирование сложных 3D-моделей с помощью 3D-редакторов по алгоритму. Основы трехмерного моделирования в Компас 3D Аскон компас ─ это САПР
Аскон компас ─ это САПР Интернет в руках журналиста
Интернет в руках журналиста Особенности подготовки макета газетного издания
Особенности подготовки макета газетного издания Пользовательские типы данных
Пользовательские типы данных Виды научных и учебных изданий
Виды научных и учебных изданий Час кода. Викторина
Час кода. Викторина G-Suit. Інструкція з підключення
G-Suit. Інструкція з підключення Операционные системы
Операционные системы Java Best Practice. Лучшие практики разработки на Java
Java Best Practice. Лучшие практики разработки на Java