- Opencv tutorial. (Lecture 2)

Содержание
- 2. Outline OpenCV Overview Cheatsheet Simple Programs Tour Features2D Applications
- 3. OpenCV Czar
- 4. OpenCV Overview: General Image Processing Functions Machine Learning: Detection, Recognition Segmentation Tracking Matrix Math Utilities and
- 5. CLASSIFICATION / REGRESSION (new) Fast Approximate NN (FLANN) (new) Extremely Random Trees CART Naïve Bayes MLP
- 6. OpenCV History Gary Bradski Willow 10 5 0 Original goal: Accelerate the field by lowering the
- 7. New Directory Structure Re-Organized in terms of processing pipelines Code site: https://code.ros.org/gf/project/opencv/ Core Calibration, features, I/O,
- 8. Other Languages OpenCV Conceptual Structure Python Java (TBD) Machine learning HighGUI SSE TBB GPU MPU Modules
- 9. OpenCV Tends Towards Real Time http://opencv.willowgarage.com
- 10. Software Engineering Works on: Linux, Windows, Mac OS Languages: C++, Python, C Online documentation: Online reference
- 11. License Based on BSD license Free for commercial or research use In whole or in part
- 12. What’s added in December 2010 OpenCV 2.2? Detector/Descriptor pipeline (Features2D) Many supporting detectors and descriptor features
- 13. What’s in Progress? GPU support throughout the library More functionality in features2d Better pose estimation algorithms
- 14. Where is OpenCV Used? 2M downloads Well over 2M downloads Screen shots by Gary Bradski, 2005
- 15. Useful OpenCV Links Gary Bradski, 2009 OpenCV Wiki: http://opencv.willowgarage.com/wiki OpenCV Code Repository: svn co https://code.ros.org/svn/opencv/trunk/opencv New
- 16. Outline OpenCV Overview Cheatsheet Simple Programs Tour Features2D Applications Gary Bradski, 2009
- 17. Main Structures
- 18. New “Image”: cv::Mat Mat does reference counting, so it does the right thing when it goes
- 19. Mat are Simple Mat M(480,640,CV_8UC3); // Make a 640x480 img Rect roi(100,200, 20,40); // Make a
- 20. Matrix Manipulation
- 21. Simple Matrix Operations
- 22. Simple Image Processing
- 23. Image Conversions
- 24. Histogram
- 25. I/O
- 26. Serialization I/O
- 27. Serialization I/O
- 28. GUI (“HighGUI”)
- 29. Camera Calibration, Pose, Stereo
- 30. Object Recognition
- 31. samples/c In ...\opencv\samples\c bgfg_codebook.cpp - Use of a image value codebook for background detection for collecting
- 32. samples/C++
- 33. Samples/python
- 34. Book Examples Gary Bradski, 2009 ch2_ex2_1.cpp Load image from disk ch2_ex2_2.cpp Play video from disk ch2_ex2_3.cpp
- 35. Book Examples Gary Bradski, 2009 ch4_ex4_1.cpp Use a mouse to draw boxes ch4_ex4_2.cpp Use a trackbar
- 36. Book Examples Gary Bradski, 2009 ch9_ex9_1.cpp Sampling from a line in an image ch9_watershed.cpp Image segmentation
- 37. Python Face Detector Node: 1 #!/usr/bin/python """ This program is demonstration python ROS Node for face
- 38. Python Face Detector Node: 2 if __name__ == '__main__': pkgdir = roslib.packages.get_pkg_dir("opencv2") haarfile = os.path.join(pkgdir, "opencv/share/opencv/haarcascades/haarcascade_frontalface_alt.xml")
- 39. Outline OpenCV Overview Cheatsheet Simple Programs Tour Features2D Applications Gary Bradski, 2009
- 40. New C++ API: Usage Example double calcGradients(const IplImage *src, int aperture_size = 7) { CvSize sz
- 41. Pyramid /* * Make an image pyramid with levels of arbitrary scale reduction (0,1) * M
- 42. Outline OpenCV Overview Cheatsheet Simple Programs Tour Features2D Applications Gary Bradski, 2009
- 43. Canny Edge Detector
- 44. Distance Transform Distance field from edges of objects Flood Filling
- 45. Hough Transform Gary Bradski, Adrian Kahler 2008
- 46. Space Variant vision: Log-Polar Transform Screen shots by Gary Bradski, 2005
- 47. Scale Space void cvPyrDown( IplImage* src, IplImage* dst, IplFilter filter = IPL_GAUSSIAN_5x5); void cvPyrUp( IplImage* src,
- 48. Thresholds Screen shots by Gary Bradski, 2005
- 49. Histogram Equalization Screen shots by Gary Bradski, 2005
- 50. Contours
- 51. Morphological Operations Examples Morphology - applying Min-Max. Filters and its combinations Opening IoB= (IΘB)⊕B Dilatation I⊕B
- 52. Image textures Inpainting: Removes damage to images, in this case, it removes the text.
- 53. Segmentation Pyramid, mean-shift, graph-cut Here: Watershed Screen shots by Gary Bradski, 2005
- 54. Graph Cut based segmentation Recent Algorithms: GrabCut Images by Gary Bradski, © 2010
- 55. Motion Templates (work with James Davies) Object silhouette Motion history images Motion history gradients Motion segmentation
- 56. Segmentation, Motion Tracking and Gesture Recognition Pose Recognition Motion Segmentation Gesture Recognition Motion Segmentation Screen shots
- 57. New Optical Flow Algorithms // opencv/samples/c/lkdemo.c int main(…){ … CvCapture* capture = ? cvCaptureFromCAM(camera_id) : cvCaptureFromFile(path);
- 58. Tracking with CAMSHIFT Control game with head Screen shots by Gary Bradski, 2005
- 59. Projections Screen shots by Gary Bradski, 2005
- 60. Stereo … Depth from Triangulation Involved topic, here we will just skim the basic geometry. Imagine
- 61. Stereo In aligned stereo, depth is from similar triangles: Problem: Cameras are almost impossible to align
- 62. Stereo Rectification Algorithm steps are shown at right: Goal: Each row of the image contains the
- 63. Outline OpenCV Overview Cheatsheet Simple Programs Tour Features2D Applications Gary Bradski, 2009
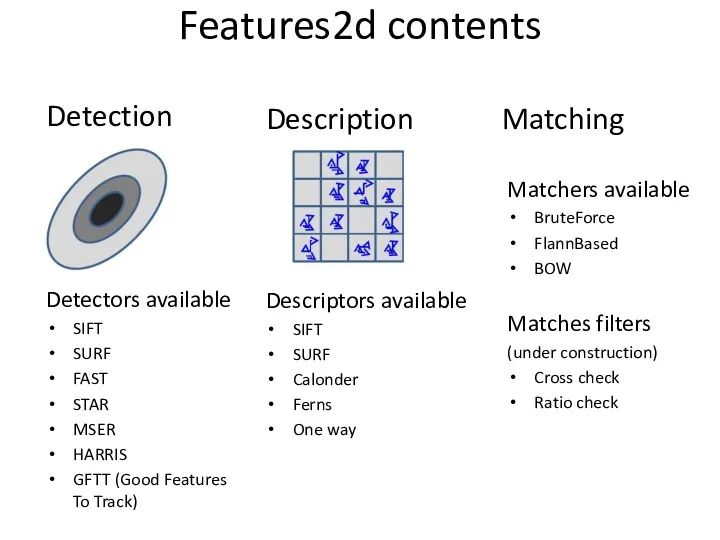
- 64. Features2d contents Detection Detectors available SIFT SURF FAST STAR MSER HARRIS GFTT (Good Features To Track)
- 65. Detector interfaces class FeatureDetector { public: virtual ~FeatureDetector() {} // Detect keypoints in an image. virtual
- 66. Creating a detector Statically SurfFeatureDetector detector; Using class factory cv::Ptr detector = createFeatureDetector(“SURF”);
- 67. Running detector Mat img = imread( "test.png" ); vector keypoints; SurfFeatureDetector detector; detector.detect( img, keypoints );
- 68. Descriptor interfaces For descriptors that can be represented as vectors in multidimensional space: DescriptorExtractor and DescriptorMatcher
- 69. DescriptorExtractor interfaces class CV_EXPORTS DescriptorExtractor { public: virtual ~DescriptorExtractor() {} // Compute the descriptors for a
- 70. DescriptorExtractor creating Statically SurfDescriptorExtractor descriptorExtractor; Using class factory cv::Ptr descriptorExtractor = createDescriptorExtractor("SURF");
- 71. DescriptorExtractor running Ptr detector = createFeatureDetector("FAST"); Ptr descriptorExtractor = createDescriptorExtractor("SURF"); vector keypoints; detector->detect( img, keypoints );
- 72. DescriptorMatcher interfaces Two groups of match methods to match descriptors of image pair to match descriptors
- 73. Matching of image pair // detecting keypoints SurfFeatureDetector detector; vector keypoints1, keypoints2; detector.detect( img1, keypoints1 );
- 74. Visualize keypoints Visualize matches Mat img_points; drawKeypoints( img, keypoints, img_points ); namedWindow( “keypoints”, 1 ); imshow(
- 75. Running the sample Download OpenCV Compile Run matcher_simple: bin/matcher_simple ../../opencv/samples/c/box.png ../../opencv/samples/c/box_in_scene.png Select a detector that gives
- 76. Cross-check outlier match filtering BruteForceMatcher > descriptorMatcher; vector filteredMatches12, matches12, matches21; descriptorMatcher.match( descriptors1, descriptors2, matches12 );
- 77. Ratio test to filter matches (less is better)
- 78. Calculating inliers (planar objects case) Detect keypoints Find matches using descriptors Filter matches using cross-check Calculate
- 79. Detector testbench Measures of detector repeatability are taken from K.Mikolajczyk, Cordelia Schmid, “Scale & Affine Invariant
- 80. Descriptor testbench Measures of descriptor matching accuracy are taken from http://www.robots.ox.ac.uk/~vgg/research/affine/det_eval_files/mikolajczyk_pami2004.pdf Test images are taken from
- 81. OpenCV and ROS Opencv2 package to fetch and compile opencv Messages: sensor_msgs::Image sensor_msgs::CameraInfo cv_bridge to convert
- 83. Скачать презентацию
Outline
OpenCV Overview
Cheatsheet
Simple Programs
Tour
Features2D
Applications
Outline
OpenCV Overview
Cheatsheet
Simple Programs
Tour
Features2D
Applications

OpenCV Czar
OpenCV Czar
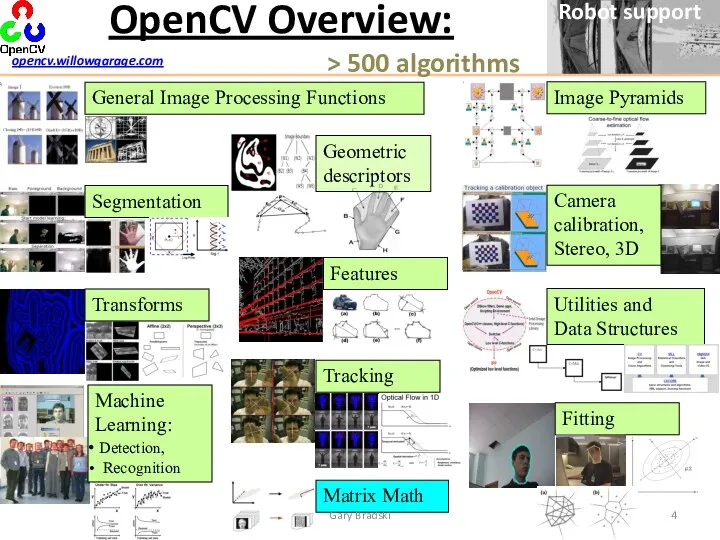
OpenCV Overview:
General Image Processing Functions
Machine Learning:
Detection,
Recognition
Segmentation
Tracking
Matrix Math
Utilities and
OpenCV Overview:
General Image Processing Functions
Machine Learning:
Detection,
Recognition
Segmentation
Tracking
Matrix Math
Utilities and
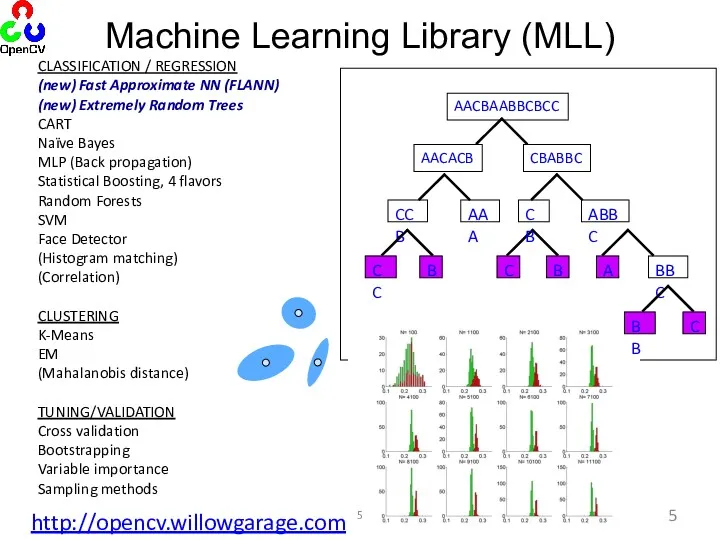
CLASSIFICATION / REGRESSION
(new) Fast Approximate NN (FLANN)
(new) Extremely Random Trees
CART
Naïve Bayes
MLP
CLASSIFICATION / REGRESSION
(new) Fast Approximate NN (FLANN)
(new) Extremely Random Trees
CART
Naïve Bayes
MLP
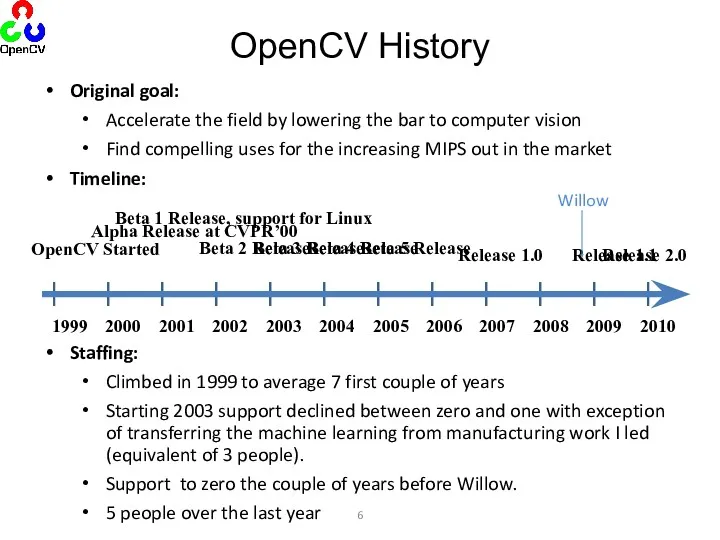
OpenCV History
Gary Bradski
Willow
10
5
0
Original goal:
Accelerate the field by lowering the bar to
OpenCV History
Gary Bradski
Willow
10
5
0
Original goal:
Accelerate the field by lowering the bar to
New Directory Structure
Re-Organized in terms of processing pipelines
Code site: https://code.ros.org/gf/project/opencv/
Core
Calibration, features,
New Directory Structure
Re-Organized in terms of processing pipelines
Code site: https://code.ros.org/gf/project/opencv/
Core
Calibration, features,
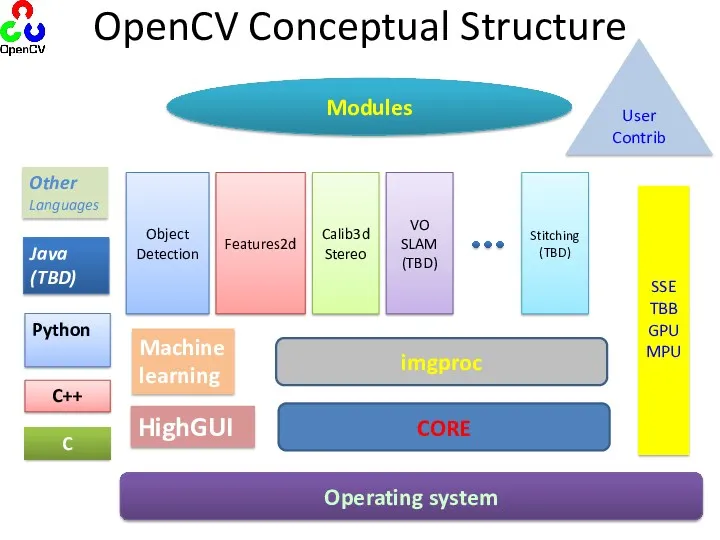
Other
Languages
OpenCV Conceptual Structure
Python
Java (TBD)
Machine learning
HighGUI
SSE
TBB
GPU
MPU
Modules
CORE
imgproc
Object
Detection
Features2d
Calib3d
Stereo
VO
SLAM
(TBD)
Stitching
(TBD)
User Contrib
Operating system
C
C++
Other
Languages
OpenCV Conceptual Structure
Python
Java (TBD)
Machine learning
HighGUI
SSE
TBB
GPU
MPU
Modules
CORE
imgproc
Object
Detection
Features2d
Calib3d
Stereo
VO
SLAM
(TBD)
Stitching
(TBD)
User Contrib
Operating system
C
C++
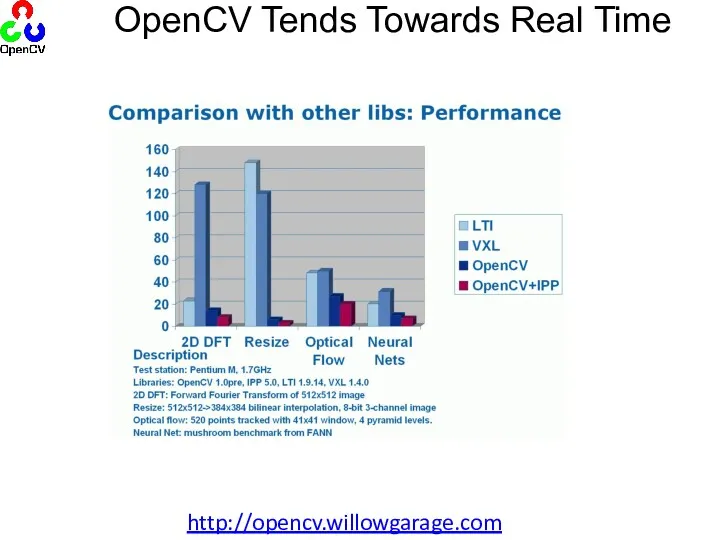
OpenCV Tends Towards Real Time
http://opencv.willowgarage.com
OpenCV Tends Towards Real Time
http://opencv.willowgarage.com
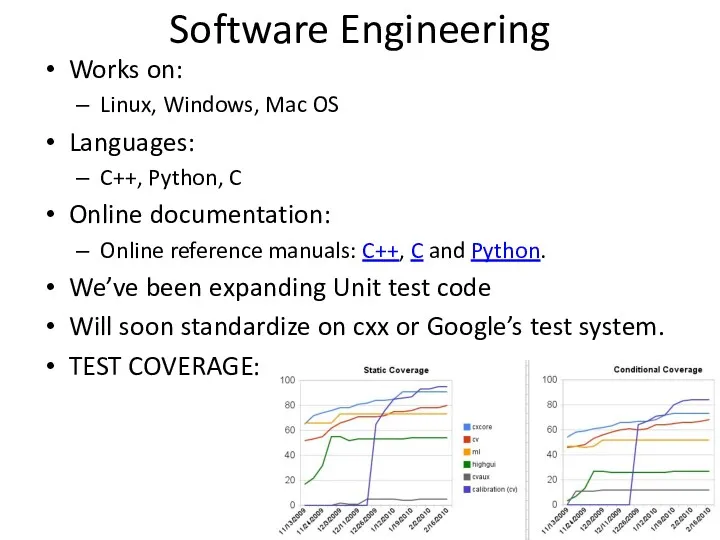
Software Engineering
Works on:
Linux, Windows, Mac OS
Languages:
C++, Python, C
Online documentation:
Online
Software Engineering
Works on:
Linux, Windows, Mac OS
Languages:
C++, Python, C
Online documentation:
Online
License
Based on BSD license
Free for commercial or research use
In whole or
License
Based on BSD license
Free for commercial or research use
In whole or
What’s added in December 2010
OpenCV 2.2?
Detector/Descriptor pipeline (Features2D)
Many supporting detectors and
What’s added in December 2010
OpenCV 2.2?
Detector/Descriptor pipeline (Features2D)
Many supporting detectors and
What’s in Progress?
GPU support throughout the library
More functionality in features2d
Better pose
What’s in Progress?
GPU support throughout the library
More functionality in features2d
Better pose
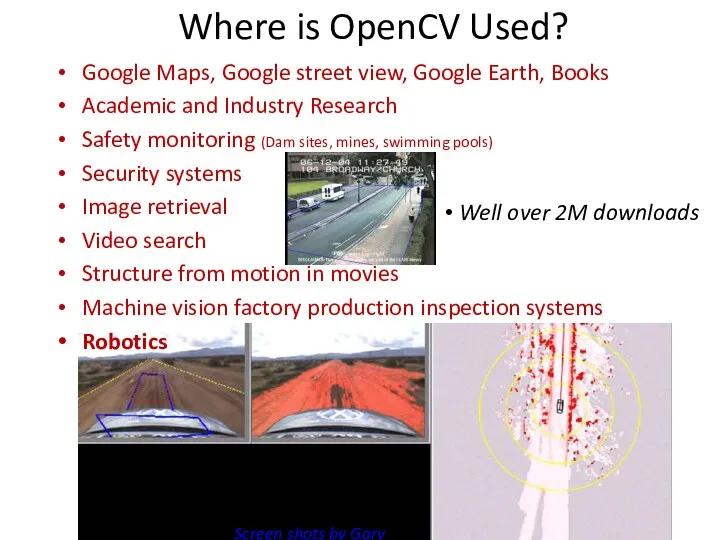
Where is OpenCV Used?
2M downloads
Well over 2M downloads
Screen shots by
Where is OpenCV Used?
2M downloads
Well over 2M downloads
Screen shots by
Useful OpenCV Links
Gary Bradski, 2009
OpenCV Wiki:
http://opencv.willowgarage.com/wiki
OpenCV Code Repository:
svn co https://code.ros.org/svn/opencv/trunk/opencv
New Book
Useful OpenCV Links
Gary Bradski, 2009
OpenCV Wiki:
http://opencv.willowgarage.com/wiki
OpenCV Code Repository:
svn co https://code.ros.org/svn/opencv/trunk/opencv
New Book
Outline
OpenCV Overview
Cheatsheet
Simple Programs
Tour
Features2D
Applications
Gary Bradski, 2009
Outline
OpenCV Overview
Cheatsheet
Simple Programs
Tour
Features2D
Applications
Gary Bradski, 2009
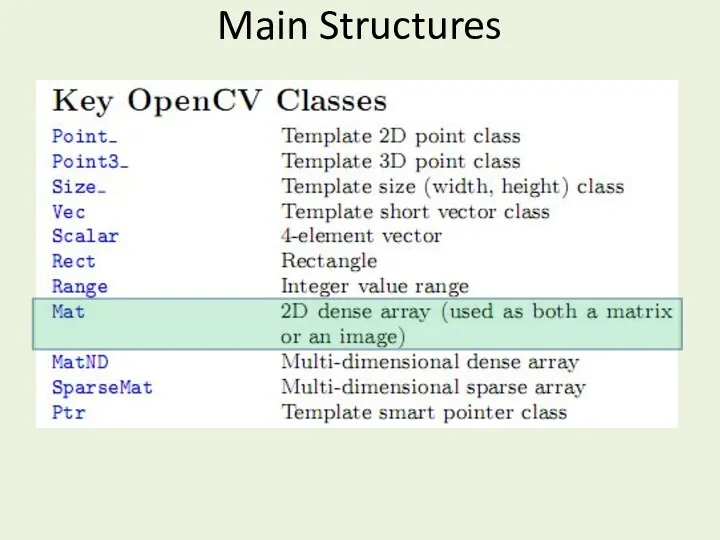
Main Structures
Main Structures
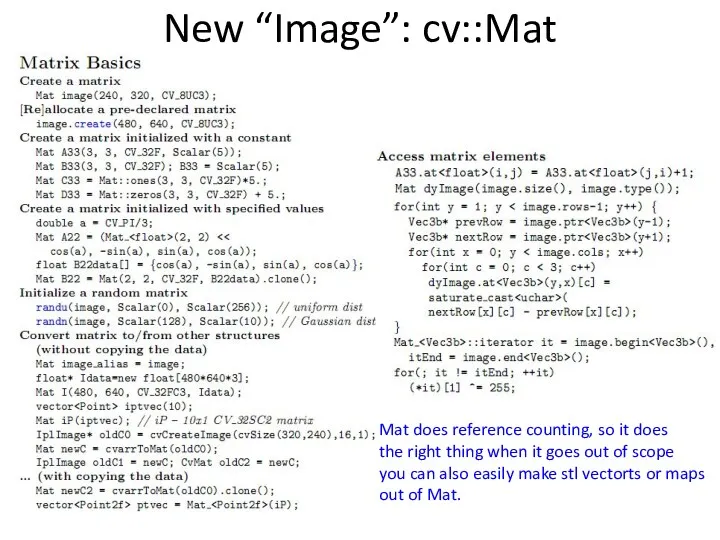
New “Image”: cv::Mat
Mat does reference counting, so it does
the right thing
New “Image”: cv::Mat
Mat does reference counting, so it does
the right thing
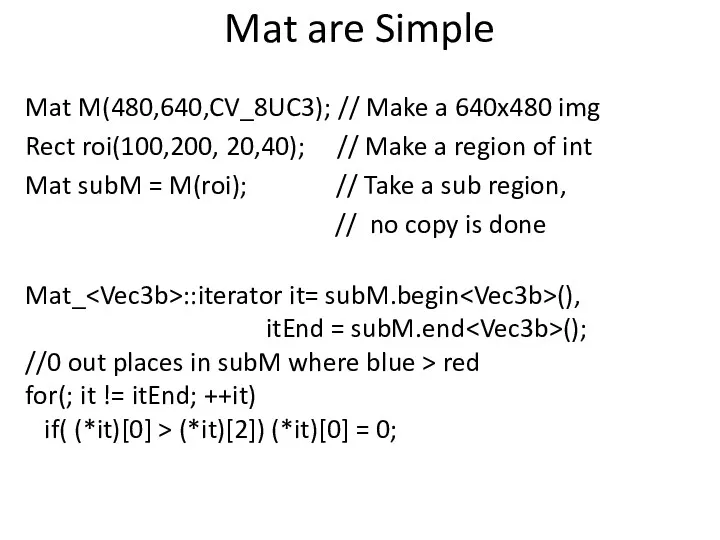
Mat are Simple
Mat M(480,640,CV_8UC3); // Make a 640x480 img
Rect roi(100,200, 20,40);
Mat are Simple
Mat M(480,640,CV_8UC3); // Make a 640x480 img
Rect roi(100,200, 20,40);
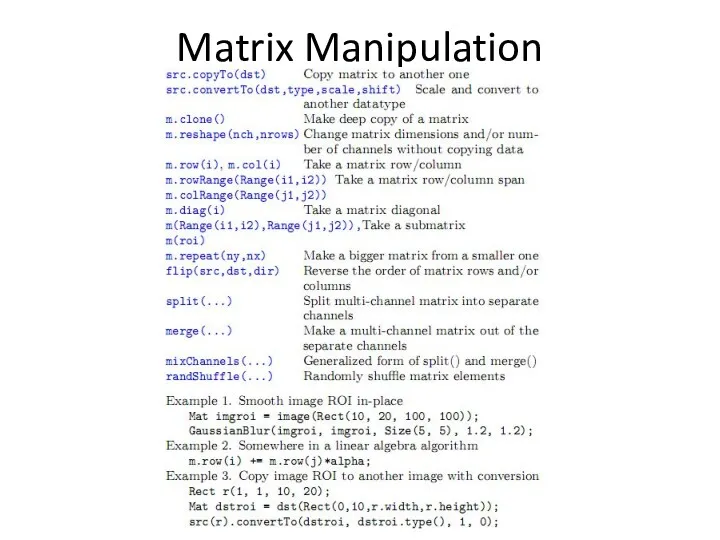
Matrix Manipulation
Matrix Manipulation
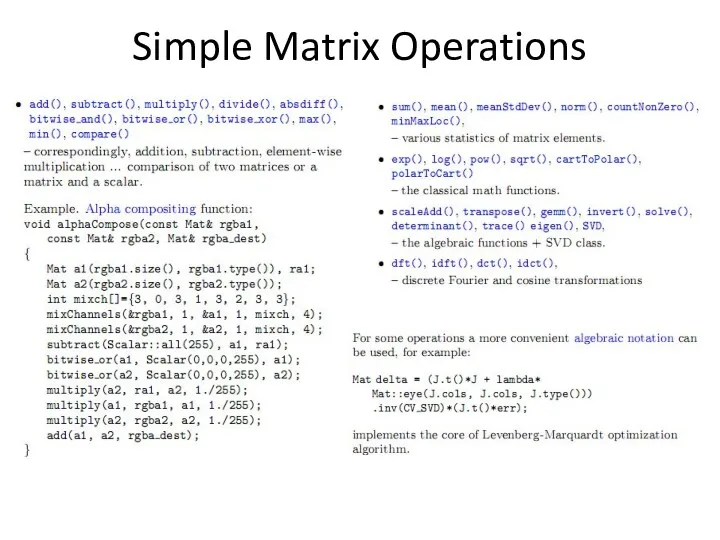
Simple Matrix Operations
Simple Matrix Operations
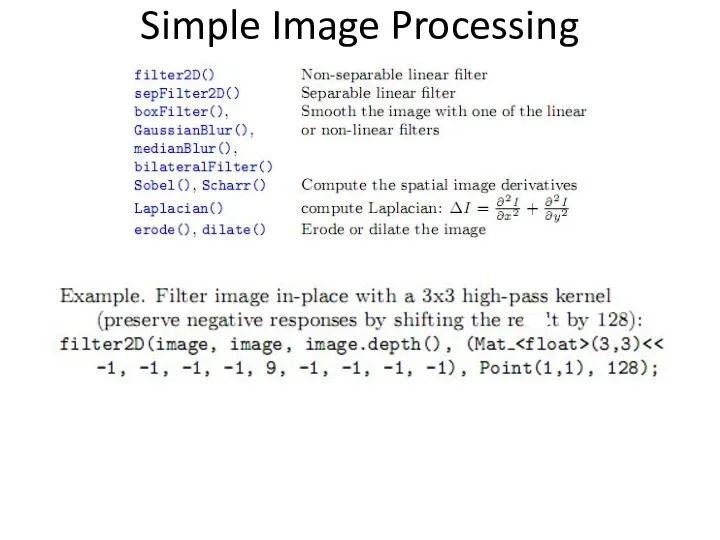
Simple Image Processing
Simple Image Processing
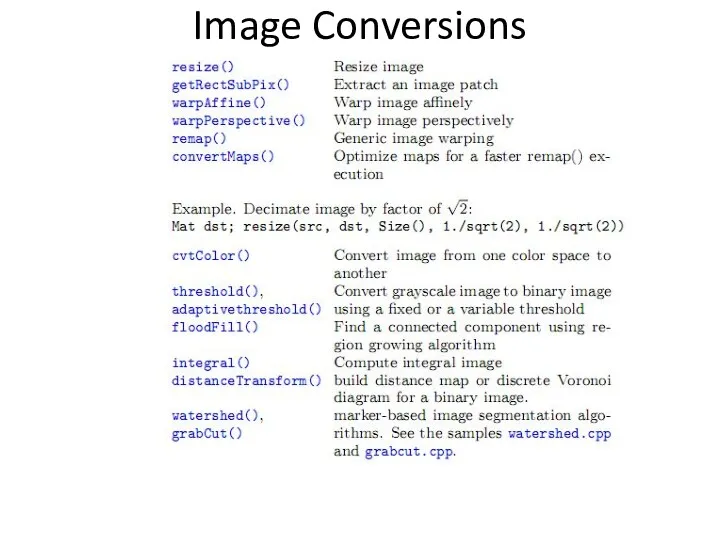
Image Conversions
Image Conversions
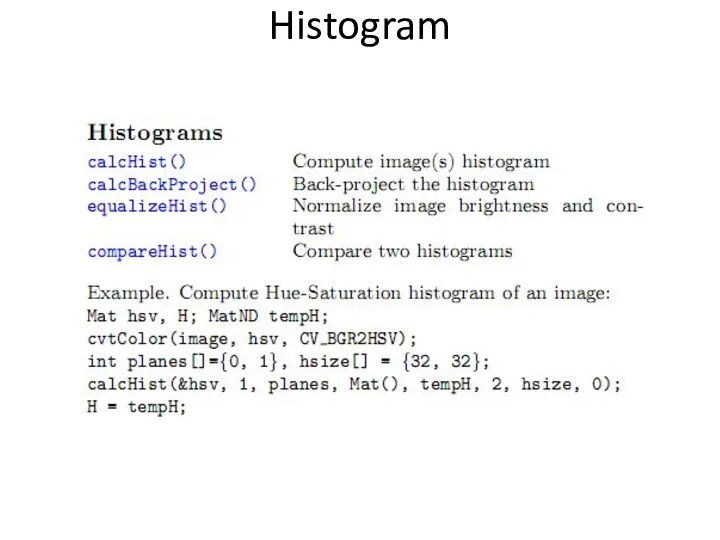
Histogram
Histogram
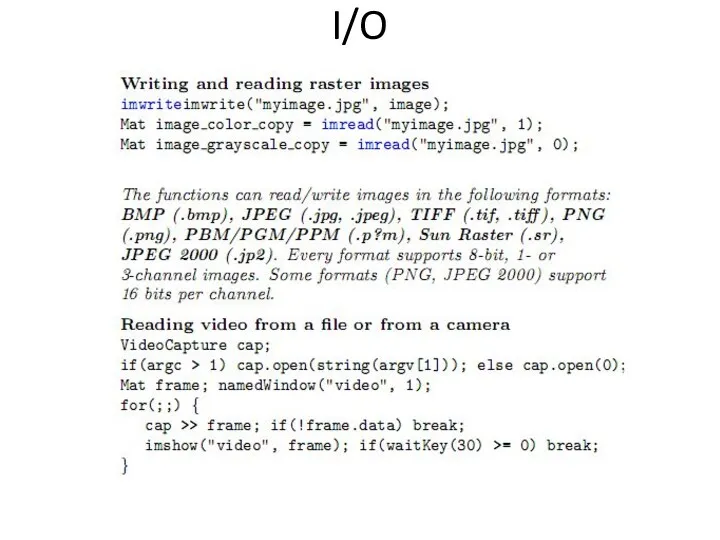
I/O
I/O
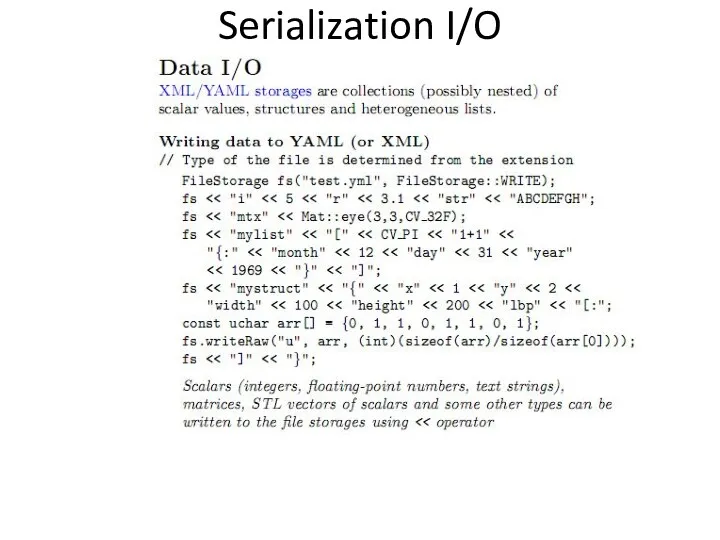
Serialization I/O
Serialization I/O
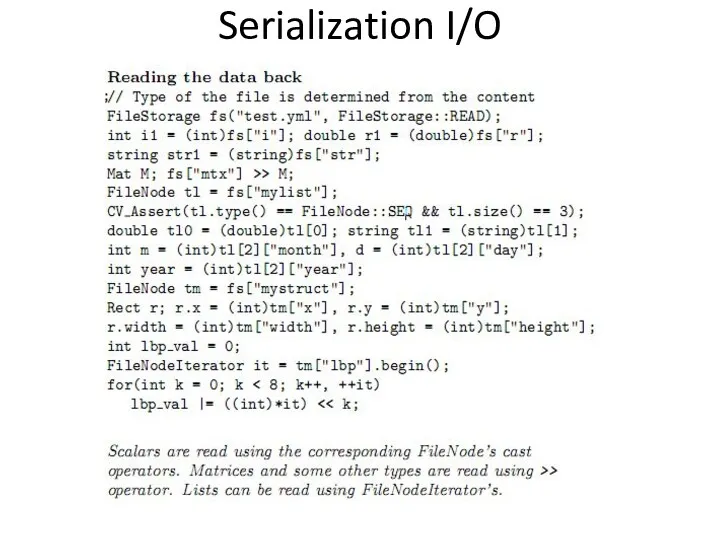
Serialization I/O
Serialization I/O
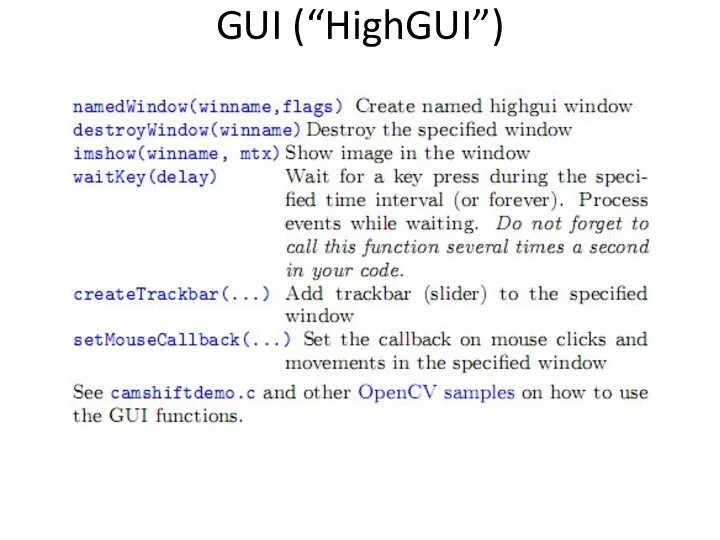
GUI (“HighGUI”)
GUI (“HighGUI”)
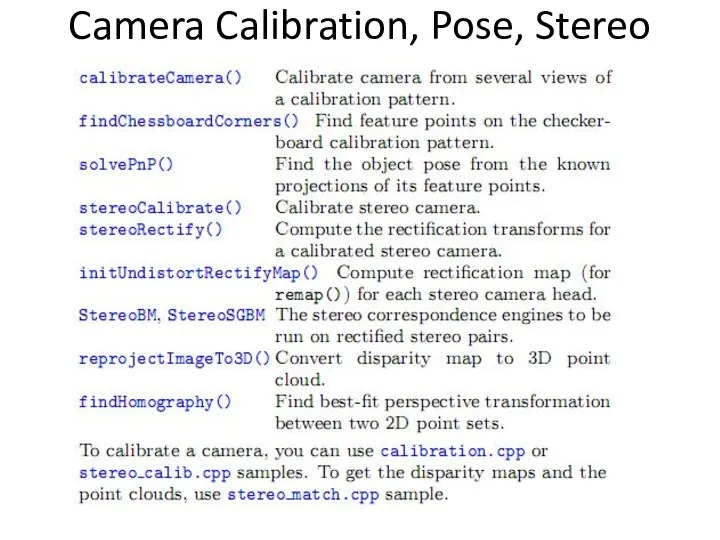
Camera Calibration, Pose, Stereo
Camera Calibration, Pose, Stereo
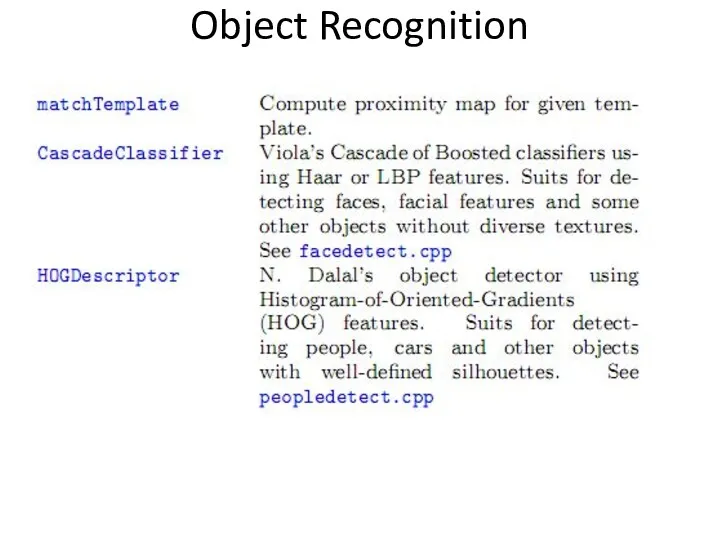
Object Recognition
Object Recognition
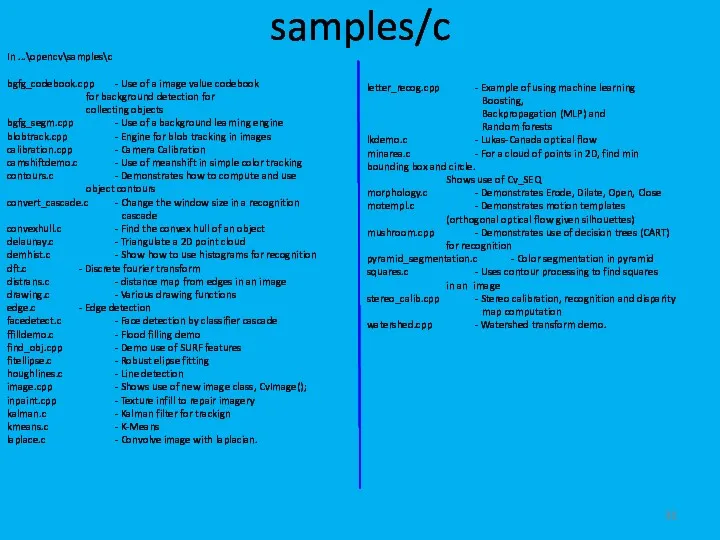
samples/c
In ...\opencv\samples\c
bgfg_codebook.cpp - Use of a image value codebook
for background
samples/c
In ...\opencv\samples\c
bgfg_codebook.cpp - Use of a image value codebook
for background
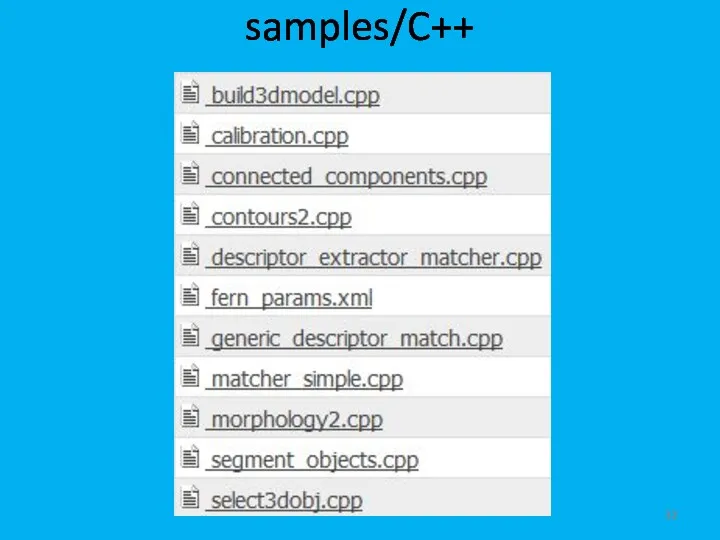
samples/C++
samples/C++
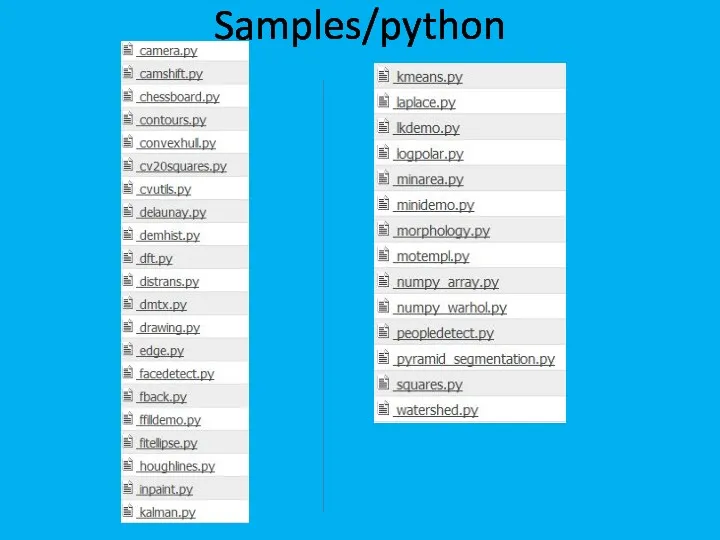
Samples/python
Samples/python
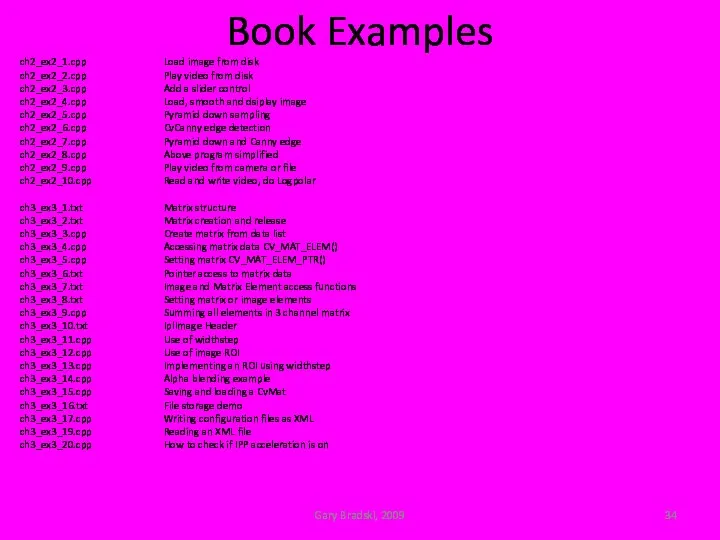
Book Examples
Gary Bradski, 2009
ch2_ex2_1.cpp Load image from disk
ch2_ex2_2.cpp Play video from disk
ch2_ex2_3.cpp Add a
Book Examples
Gary Bradski, 2009
ch2_ex2_1.cpp Load image from disk
ch2_ex2_2.cpp Play video from disk
ch2_ex2_3.cpp Add a
Book Examples
Gary Bradski, 2009
ch4_ex4_1.cpp Use a mouse to draw boxes
ch4_ex4_2.cpp Use a trackbar
Book Examples
Gary Bradski, 2009
ch4_ex4_1.cpp Use a mouse to draw boxes
ch4_ex4_2.cpp Use a trackbar
Book Examples
Gary Bradski, 2009
ch9_ex9_1.cpp Sampling from a line in an image
ch9_watershed.cpp Image segmentation
Book Examples
Gary Bradski, 2009
ch9_ex9_1.cpp Sampling from a line in an image
ch9_watershed.cpp Image segmentation
Python Face Detector Node: 1
#!/usr/bin/python
"""
This program is demonstration python ROS Node
Python Face Detector Node: 1
#!/usr/bin/python
"""
This program is demonstration python ROS Node
Python Face Detector Node: 2
if __name__ == '__main__':
pkgdir = roslib.packages.get_pkg_dir("opencv2")
Python Face Detector Node: 2
if __name__ == '__main__':
pkgdir = roslib.packages.get_pkg_dir("opencv2")
Outline
OpenCV Overview
Cheatsheet
Simple Programs
Tour
Features2D
Applications
Gary Bradski, 2009
Outline
OpenCV Overview
Cheatsheet
Simple Programs
Tour
Features2D
Applications
Gary Bradski, 2009
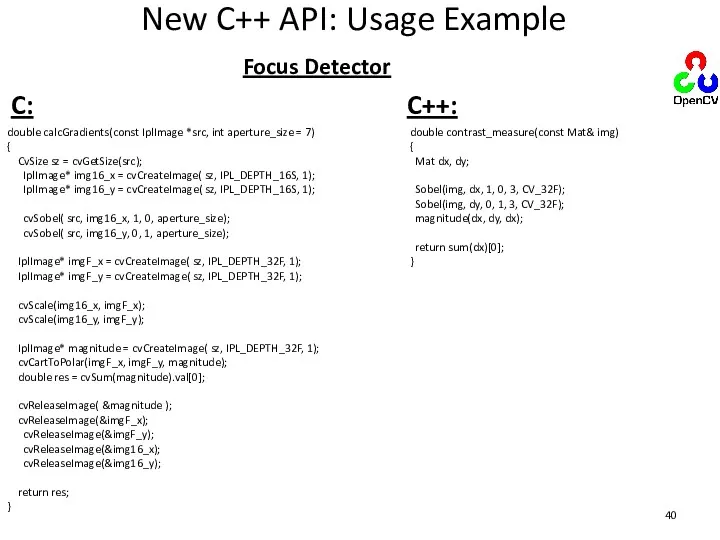
New C++ API: Usage Example
double calcGradients(const IplImage *src, int aperture_size =
New C++ API: Usage Example
double calcGradients(const IplImage *src, int aperture_size =
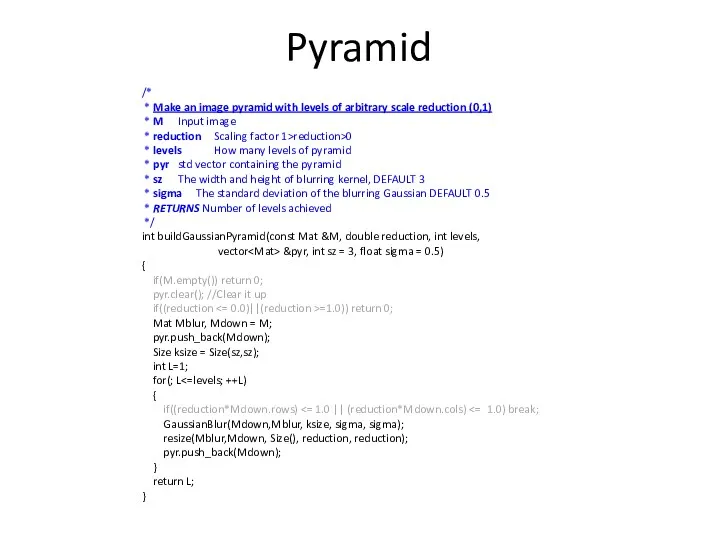
Pyramid
/*
* Make an image pyramid with levels of arbitrary scale
Pyramid
/*
* Make an image pyramid with levels of arbitrary scale
Outline
OpenCV Overview
Cheatsheet
Simple Programs
Tour
Features2D
Applications
Gary Bradski, 2009
Outline
OpenCV Overview
Cheatsheet
Simple Programs
Tour
Features2D
Applications
Gary Bradski, 2009
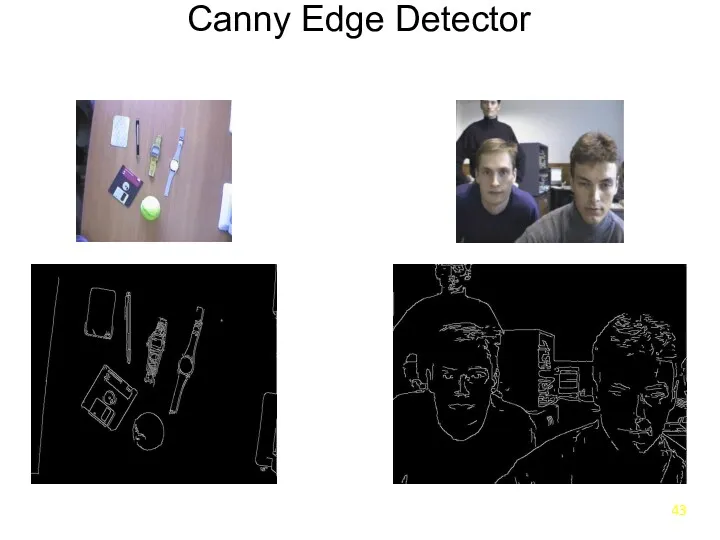
Canny Edge Detector
Canny Edge Detector
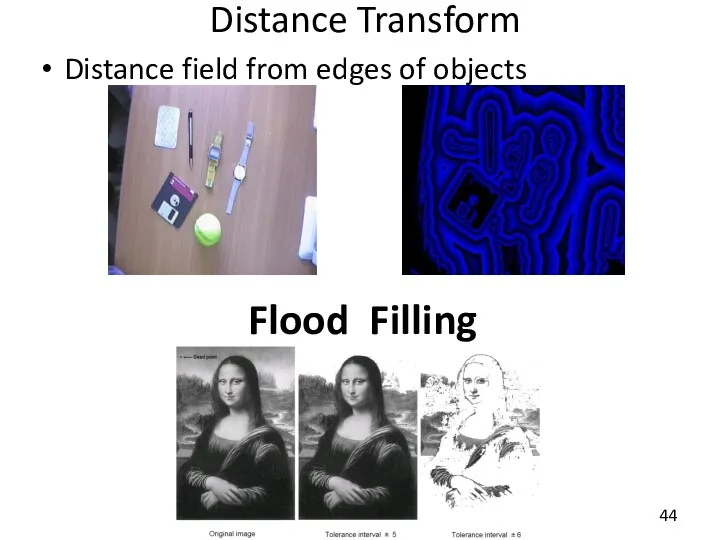
Distance Transform
Distance field from edges of objects
Flood Filling
Distance Transform
Distance field from edges of objects
Flood Filling
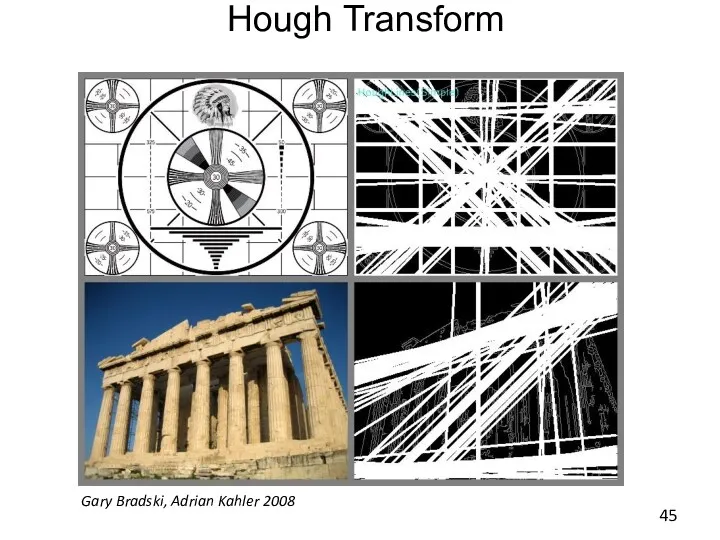
Hough Transform
Gary Bradski, Adrian Kahler 2008
Hough Transform
Gary Bradski, Adrian Kahler 2008
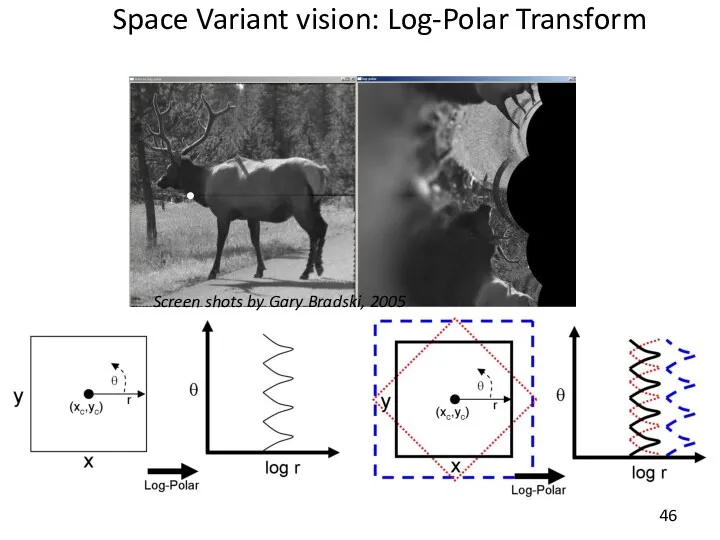
Space Variant vision: Log-Polar Transform
Screen shots by Gary Bradski, 2005
Space Variant vision: Log-Polar Transform
Screen shots by Gary Bradski, 2005
Scale Space
void cvPyrDown(
IplImage* src,
IplImage* dst,
IplFilter filter = IPL_GAUSSIAN_5x5);
void cvPyrUp(
IplImage* src,
IplImage* dst,
IplFilter filter =
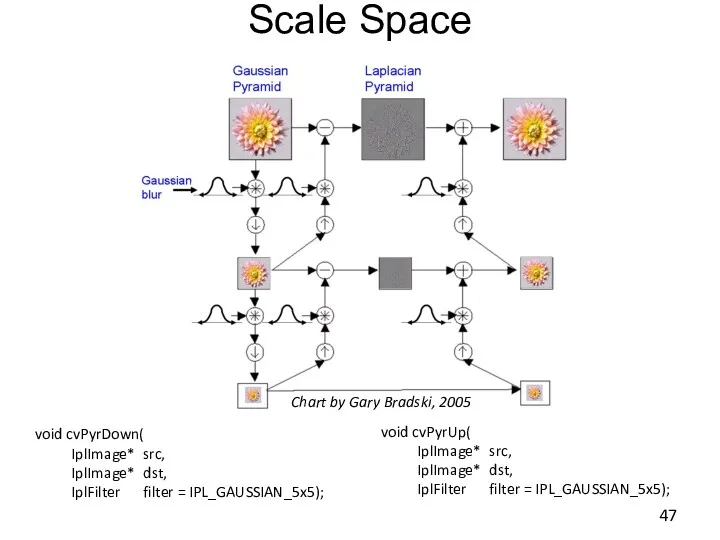
Scale Space
void cvPyrDown(
IplImage* src,
IplImage* dst,
IplFilter filter = IPL_GAUSSIAN_5x5);
void cvPyrUp(
IplImage* src,
IplImage* dst,
IplFilter filter =
Thresholds
Screen shots by Gary Bradski, 2005
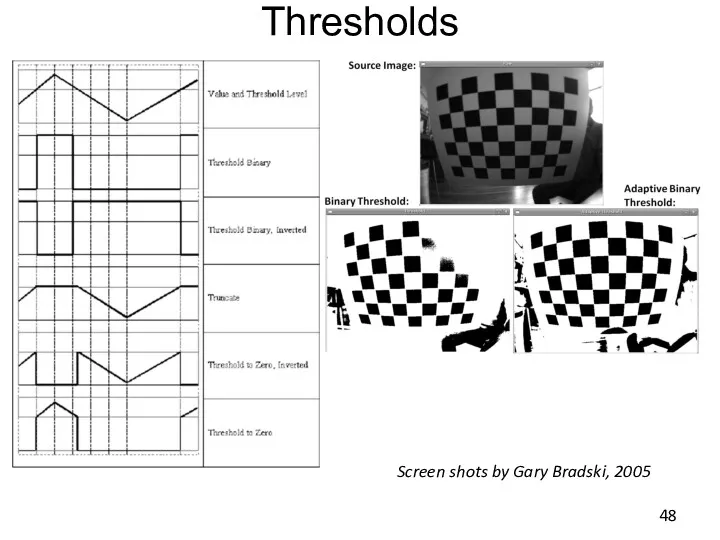
Thresholds
Screen shots by Gary Bradski, 2005
Histogram Equalization
Screen shots by Gary Bradski, 2005
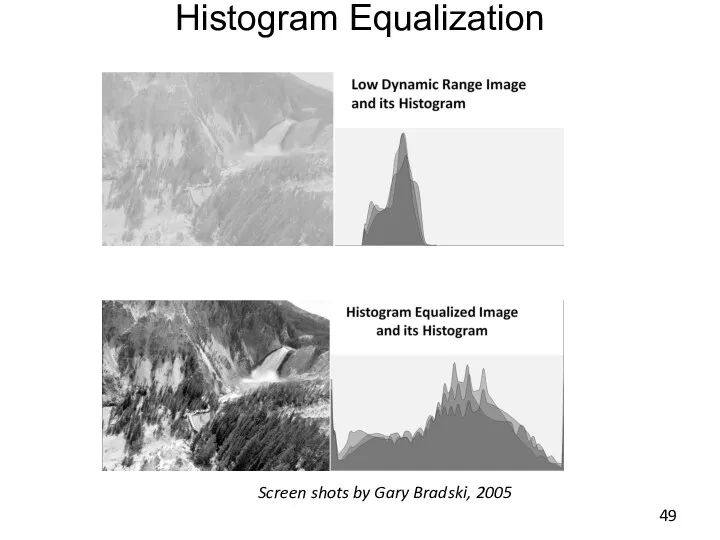
Histogram Equalization
Screen shots by Gary Bradski, 2005
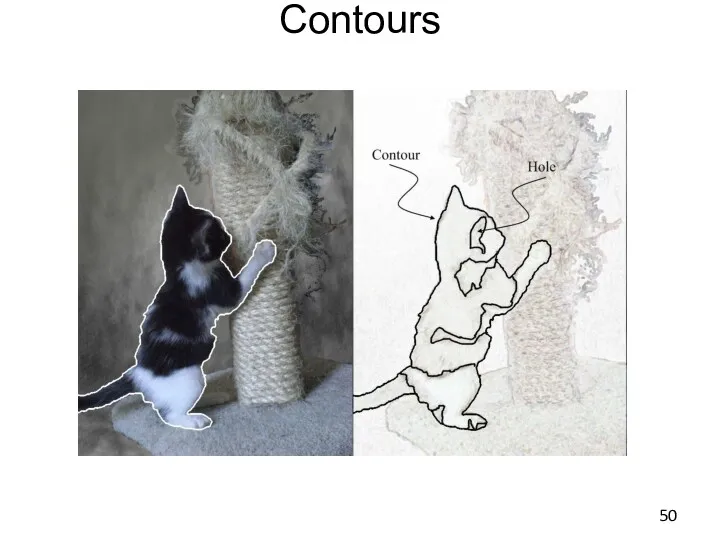
Contours
Contours
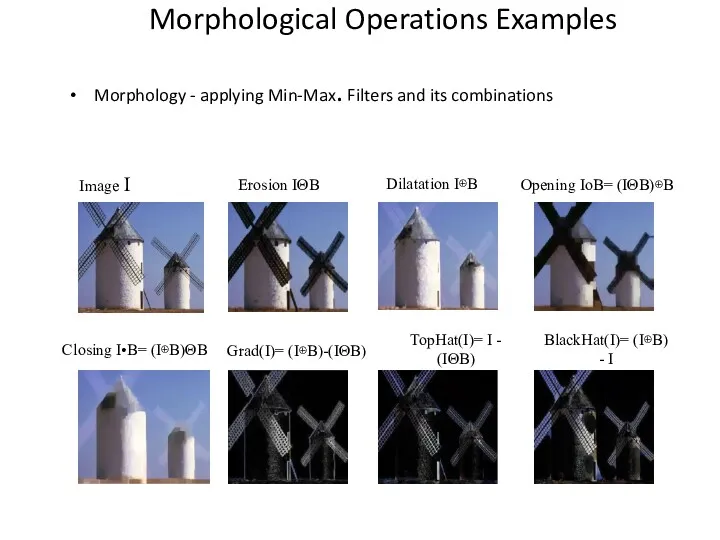
Morphological Operations Examples
Morphology - applying Min-Max. Filters and its combinations
Opening IoB=
Morphological Operations Examples
Morphology - applying Min-Max. Filters and its combinations
Opening IoB=
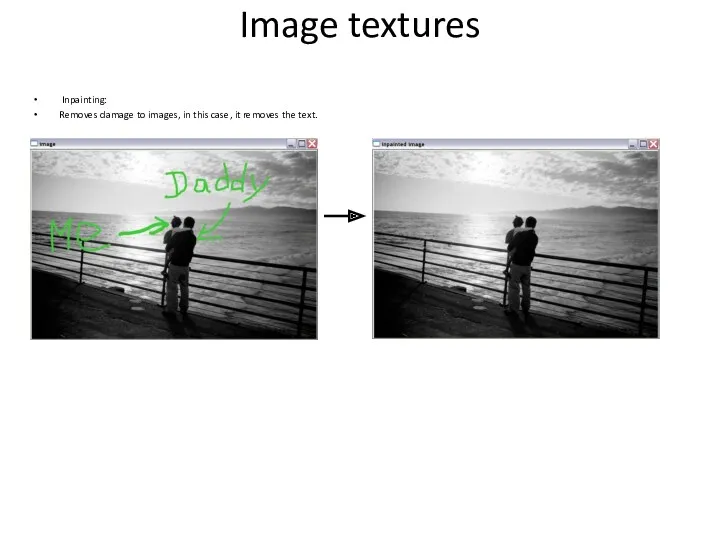
Image textures
Inpainting:
Removes damage to images, in this case, it removes
Image textures
Inpainting:
Removes damage to images, in this case, it removes
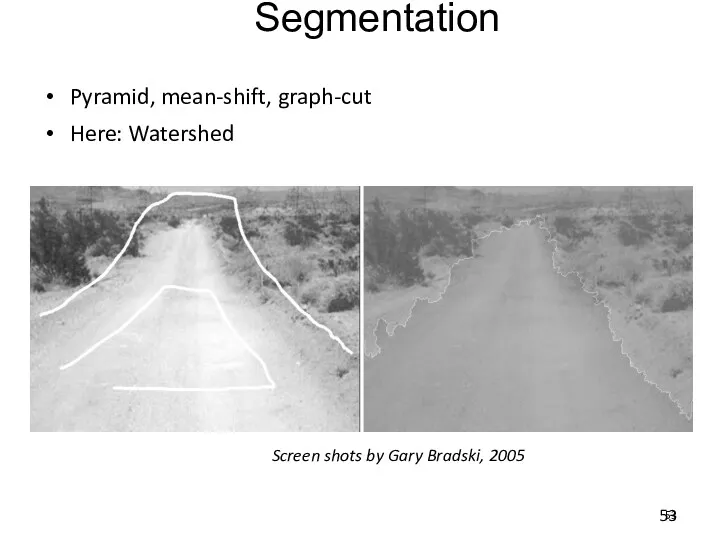
Segmentation
Pyramid, mean-shift, graph-cut
Here: Watershed
Screen shots by Gary Bradski, 2005
Segmentation
Pyramid, mean-shift, graph-cut
Here: Watershed
Screen shots by Gary Bradski, 2005
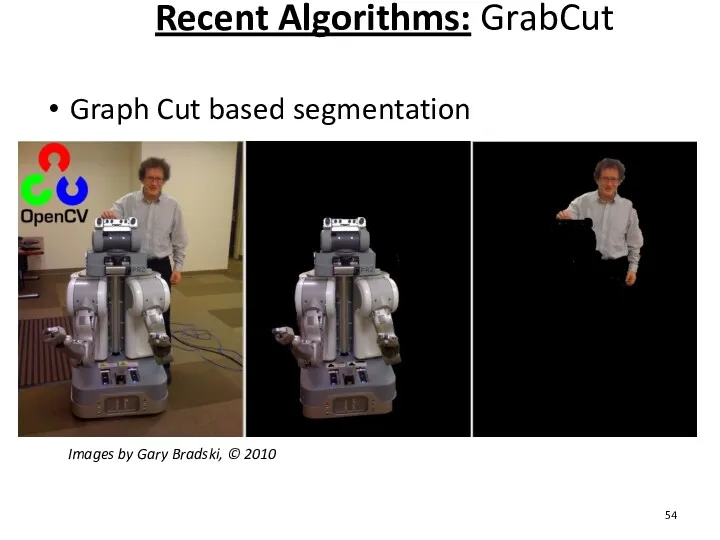
Graph Cut based segmentation
Recent Algorithms: GrabCut
Images by Gary Bradski, © 2010
Graph Cut based segmentation
Recent Algorithms: GrabCut
Images by Gary Bradski, © 2010
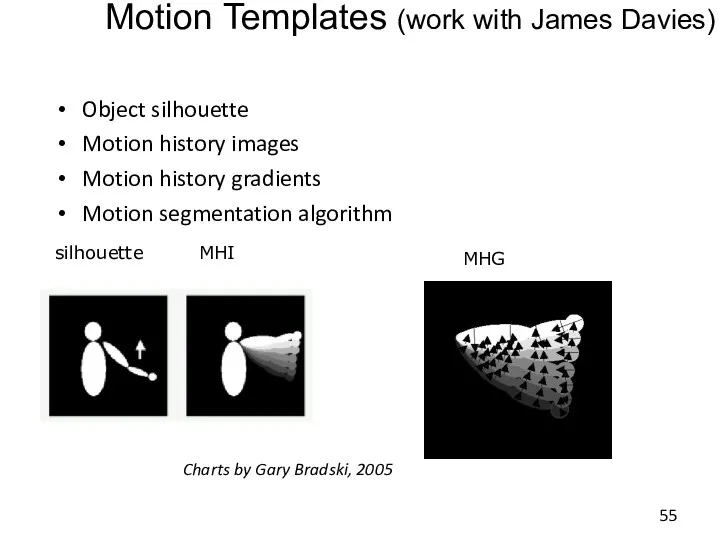
Motion Templates (work with James Davies)
Object silhouette
Motion history images
Motion history gradients
Motion
Motion Templates (work with James Davies)
Object silhouette
Motion history images
Motion history gradients
Motion
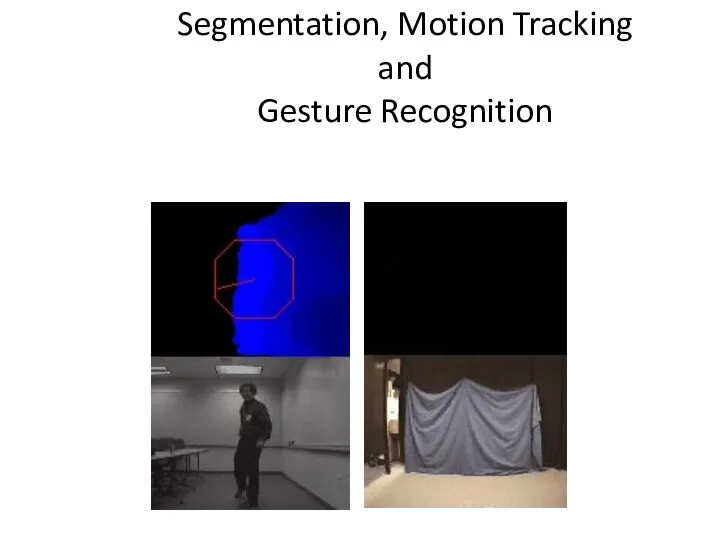
Segmentation, Motion Tracking
and
Gesture Recognition
Pose
Recognition
Motion
Segmentation
Gesture
Recognition
Motion
Segmentation
Screen shots by Gary Bradski, 2005
Segmentation, Motion Tracking
and
Gesture Recognition
Pose
Recognition
Motion
Segmentation
Gesture
Recognition
Motion
Segmentation
Screen shots by Gary Bradski, 2005
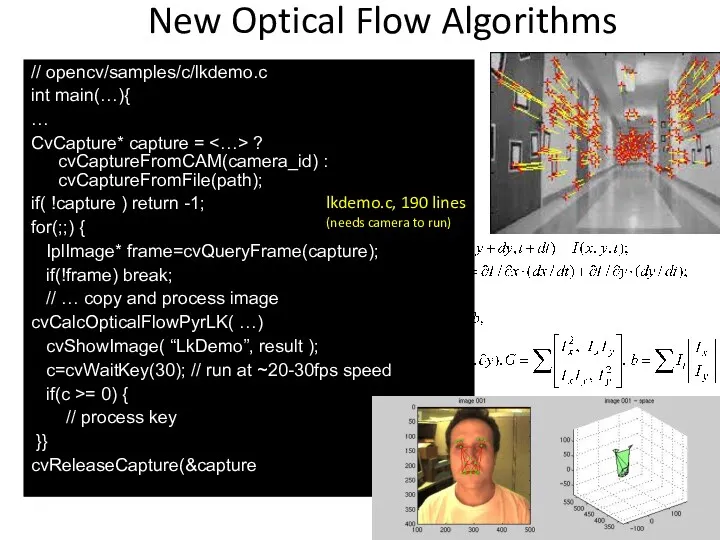
New Optical Flow Algorithms
// opencv/samples/c/lkdemo.c
int main(…){
…
CvCapture* capture = <…> ? cvCaptureFromCAM(camera_id)
New Optical Flow Algorithms
// opencv/samples/c/lkdemo.c
int main(…){
…
CvCapture* capture = <…> ? cvCaptureFromCAM(camera_id)
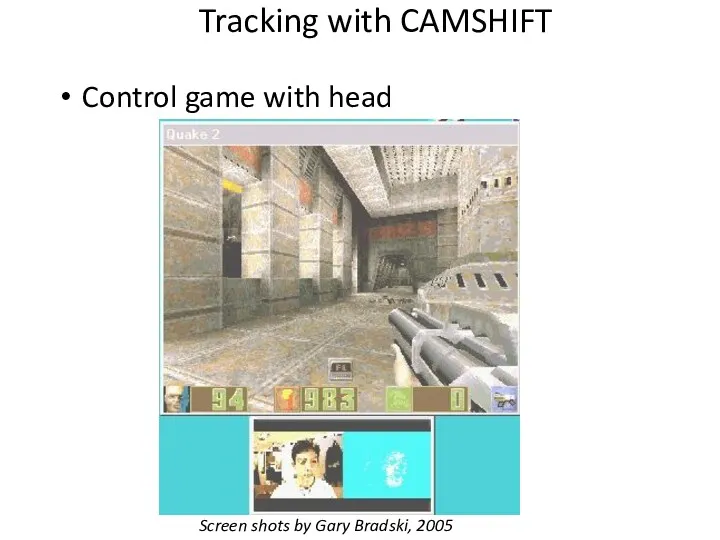
Tracking with CAMSHIFT
Control game with head
Screen shots by Gary Bradski, 2005
Tracking with CAMSHIFT
Control game with head
Screen shots by Gary Bradski, 2005
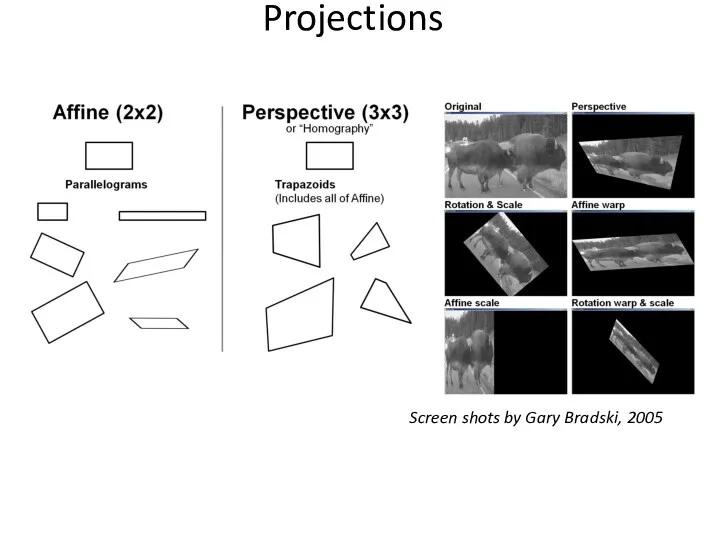
Projections
Screen shots by Gary Bradski, 2005
Projections
Screen shots by Gary Bradski, 2005
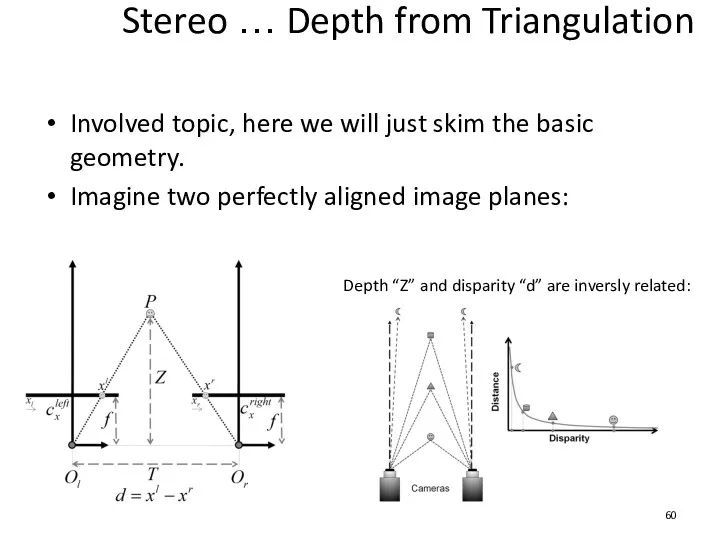
Stereo … Depth from Triangulation
Involved topic, here we will just skim
Stereo … Depth from Triangulation
Involved topic, here we will just skim
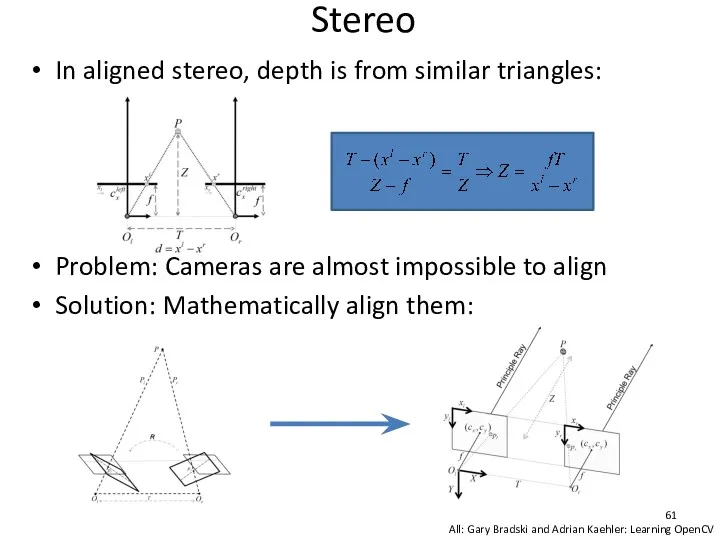
Stereo
In aligned stereo, depth is from similar triangles:
Problem: Cameras are almost
Stereo
In aligned stereo, depth is from similar triangles:
Problem: Cameras are almost
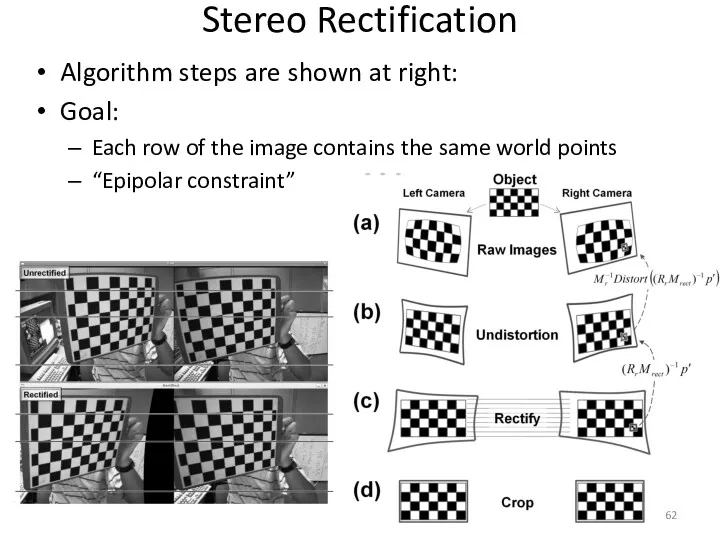
Stereo Rectification
Algorithm steps are shown at right:
Goal:
Each row of the image
Stereo Rectification
Algorithm steps are shown at right:
Goal:
Each row of the image
Outline
OpenCV Overview
Cheatsheet
Simple Programs
Tour
Features2D
Applications
Gary Bradski, 2009
Outline
OpenCV Overview
Cheatsheet
Simple Programs
Tour
Features2D
Applications
Gary Bradski, 2009
Features2d contents
Detection
Detectors available
SIFT
SURF
FAST
STAR
MSER
HARRIS
GFTT (Good Features To Track)
Description
Descriptors available
SIFT
SURF
Calonder
Ferns
One way
Matching
Matchers available
BruteForce
FlannBased
BOW
Matches filters
Features2d contents
Detection
Detectors available
SIFT
SURF
FAST
STAR
MSER
HARRIS
GFTT (Good Features To Track)
Description
Descriptors available
SIFT
SURF
Calonder
Ferns
One way
Matching
Matchers available
BruteForce
FlannBased
BOW
Matches filters
Detector interfaces
class FeatureDetector
{
public:
virtual ~FeatureDetector() {}
// Detect keypoints in an image.
Detector interfaces
class FeatureDetector
{
public:
virtual ~FeatureDetector() {}
// Detect keypoints in an image.
Creating a detector
Statically
SurfFeatureDetector detector;
Using class factory
cv::Ptr detector = createFeatureDetector(“SURF”);
Creating a detector
Statically
SurfFeatureDetector detector;
Using class factory
cv::Ptr
Running detector
Mat img = imread( "test.png" );
vector keypoints;
SurfFeatureDetector detector;
detector.detect( img, keypoints
Running detector
Mat img = imread( "test.png" );
vector
SurfFeatureDetector detector;
detector.detect( img, keypoints
Descriptor interfaces
For descriptors that can be represented as vectors in multidimensional
Descriptor interfaces
For descriptors that can be represented as vectors in multidimensional
DescriptorExtractor interfaces
class CV_EXPORTS DescriptorExtractor
{
public:
virtual ~DescriptorExtractor() {}
// Compute the descriptors
DescriptorExtractor interfaces
class CV_EXPORTS DescriptorExtractor
{
public:
virtual ~DescriptorExtractor() {}
// Compute the descriptors
DescriptorExtractor creating
Statically
SurfDescriptorExtractor descriptorExtractor;
Using class factory
cv::Ptr descriptorExtractor = createDescriptorExtractor("SURF");
DescriptorExtractor creating
Statically
SurfDescriptorExtractor descriptorExtractor;
Using class factory
cv::Ptr
DescriptorExtractor running
Ptr detector = createFeatureDetector("FAST");
Ptr descriptorExtractor = createDescriptorExtractor("SURF");
vector keypoints;
detector->detect( img, keypoints
DescriptorExtractor running
Ptr
Ptr
vector
detector->detect( img, keypoints
DescriptorMatcher interfaces
Two groups of match methods
to match descriptors of image pair
to
DescriptorMatcher interfaces
Two groups of match methods
to match descriptors of image pair
to
Matching of image pair
// detecting keypoints
SurfFeatureDetector detector;
vector keypoints1, keypoints2;
detector.detect( img1, keypoints1
Matching of image pair
// detecting keypoints
SurfFeatureDetector detector;
vector
detector.detect( img1, keypoints1
Visualize keypoints
Visualize matches
Mat img_points;
drawKeypoints( img, keypoints, img_points );
namedWindow( “keypoints”, 1 );
imshow(
Visualize keypoints
Visualize matches
Mat img_points;
drawKeypoints( img, keypoints, img_points );
namedWindow( “keypoints”, 1 );
imshow(
Running the sample
Download OpenCV
Compile
Run matcher_simple:
bin/matcher_simple ../../opencv/samples/c/box.png ../../opencv/samples/c/box_in_scene.png
Select a detector
Running the sample
Download OpenCV
Compile
Run matcher_simple:
bin/matcher_simple ../../opencv/samples/c/box.png ../../opencv/samples/c/box_in_scene.png
Select a detector
Cross-check outlier match filtering
BruteForceMatcher > descriptorMatcher;
vector filteredMatches12, matches12, matches21;
descriptorMatcher.match( descriptors1, descriptors2,
Cross-check outlier match filtering
BruteForceMatcher
vector
descriptorMatcher.match( descriptors1, descriptors2,
Ratio test to filter matches
(less is better)
Ratio test to filter matches
(less is better)
Calculating inliers (planar objects case)
Detect keypoints
Find matches using descriptors
Filter matches using
Calculating inliers (planar objects case)
Detect keypoints
Find matches using descriptors
Filter matches using
Detector testbench
Measures of detector repeatability are taken from
K.Mikolajczyk, Cordelia Schmid,
Detector testbench
Measures of detector repeatability are taken from
K.Mikolajczyk, Cordelia Schmid,
Descriptor testbench
Measures of descriptor matching accuracy are taken from
http://www.robots.ox.ac.uk/~vgg/research/affine/det_eval_files/mikolajczyk_pami2004.pdf
Test images
Descriptor testbench
Measures of descriptor matching accuracy are taken from
http://www.robots.ox.ac.uk/~vgg/research/affine/det_eval_files/mikolajczyk_pami2004.pdf
Test images
OpenCV and ROS
Opencv2 package to fetch and compile opencv
Messages:
sensor_msgs::Image
sensor_msgs::CameraInfo
cv_bridge to
OpenCV and ROS
Opencv2 package to fetch and compile opencv
Messages:
sensor_msgs::Image
sensor_msgs::CameraInfo
cv_bridge to
 Активное долголетие
Активное долголетие Концептуальная модель UML и ее элементы. Лекция 3
Концептуальная модель UML и ее элементы. Лекция 3 Основные принципы построения компьютеров
Основные принципы построения компьютеров Презентация Строки
Презентация Строки Операциялық жүйелер. Операциялық жүйелердің даму тарихы
Операциялық жүйелер. Операциялық жүйелердің даму тарихы Создание второго кампуса Университета ИТМО – комплексный проект ИТМО Хайпарк
Создание второго кампуса Университета ИТМО – комплексный проект ИТМО Хайпарк Деректер қорыдағы деректердің түрлі ұсыныстары. Деректер қорын жобалаудың негізгі кезеңдері
Деректер қорыдағы деректердің түрлі ұсыныстары. Деректер қорын жобалаудың негізгі кезеңдері Программирование реконфигурируемой вычислительной системы
Программирование реконфигурируемой вычислительной системы Уровни и виды тестирования
Уровни и виды тестирования Организация тестирования в команде разработчиков. Виды и методы тестирования
Организация тестирования в команде разработчиков. Виды и методы тестирования Creation of a simple network configuration
Creation of a simple network configuration Система межпроцессного взаимодействия IPC
Система межпроцессного взаимодействия IPC История вычислительной техники
История вычислительной техники Принципы организации внутренней и внешней памяти компьютера
Принципы организации внутренней и внешней памяти компьютера Install Linux 10.2 and Caldera 14.1
Install Linux 10.2 and Caldera 14.1 Социальная память. Функция социальной памяти
Социальная память. Функция социальной памяти Windows 10
Windows 10 Как создать свой сайт?
Как создать свой сайт? Операционные системы, среды и оболочки. Процессы в операционных системах
Операционные системы, среды и оболочки. Процессы в операционных системах Основные функции современной офисной автоматизации. Занятие №2
Основные функции современной офисной автоматизации. Занятие №2 Замісник (проксі). Патерни проектування
Замісник (проксі). Патерни проектування DS Графический дизайн. Композиция
DS Графический дизайн. Композиция Объектно-ориентированное программирование на алгоритмическом языке С++
Объектно-ориентированное программирование на алгоритмическом языке С++ Двоичная сс. Двоичная арифметика
Двоичная сс. Двоичная арифметика Системи масового обслуговування
Системи масового обслуговування Вступ. Історія розвитку мови програмування С++
Вступ. Історія розвитку мови програмування С++ Операційна система Windows
Операційна система Windows Macroscop. Технический минимум
Macroscop. Технический минимум