- Операционные Системы Реального Времени

Содержание
- 2. MT, v1.4, 2002 План (1) 1. Введение 2. Определение “реального времени” 2.1 Жесткое реальное время (hard)
- 3. MT, v1.4, 2002 План (2) 5. Базовые объекты 5.1 задачи 5.2 обработчики прерываний 5.3 ресурсы (семафоры)
- 4. MT, v1.4, 2002 План (3) 10. Обслуживание прерываний: 10.1 вложенные прерывания 10.2 немедленное выполнение сервиса ОС
- 5. MT, v1.4, 2002 План (4) 12. Техника назначения приоритетов: 12.1 Последовательное увеличение приоритетов (RMA) 12.2 Приоритетное
- 6. MT, v1.4, 2002 Ресурсы Интернет A. News: comp.realtime, comp.arch.embedded B. http://www.embedded.com (Embedded System Programming, ESP) C.
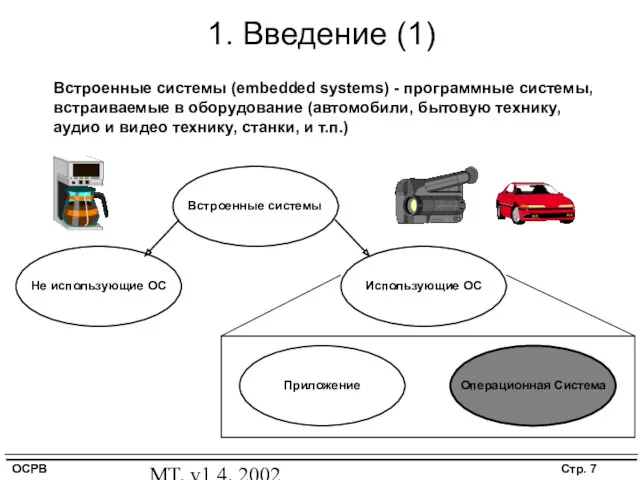
- 7. MT, v1.4, 2002 1. Введение (1) Встроенные системы (embedded systems) - программные системы, встраиваемые в оборудование
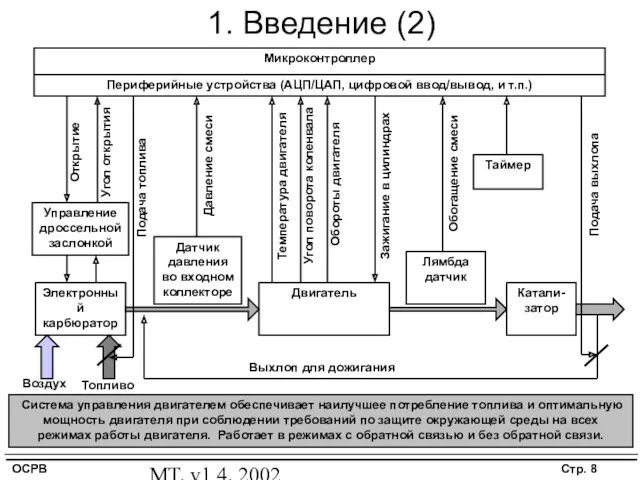
- 8. MT, v1.4, 2002 1. Введение (2) Электронный карбюратор Датчик давления во входном коллекторе Двигатель Лямбда датчик
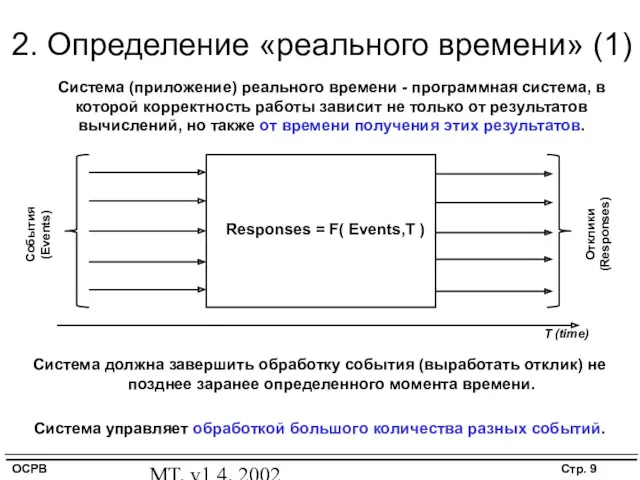
- 9. MT, v1.4, 2002 2. Определение «реального времени» (1) События (Events) T (time) Система (приложение) реального времени
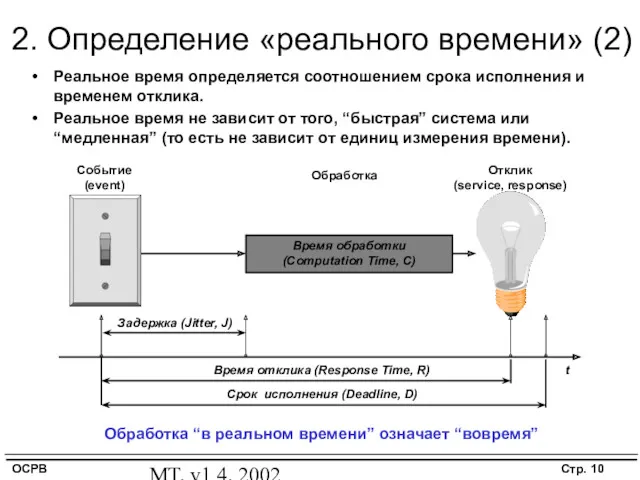
- 10. MT, v1.4, 2002 2. Определение «реального времени» (2) Обработка Событие (event) Отклик (service, response) t Время
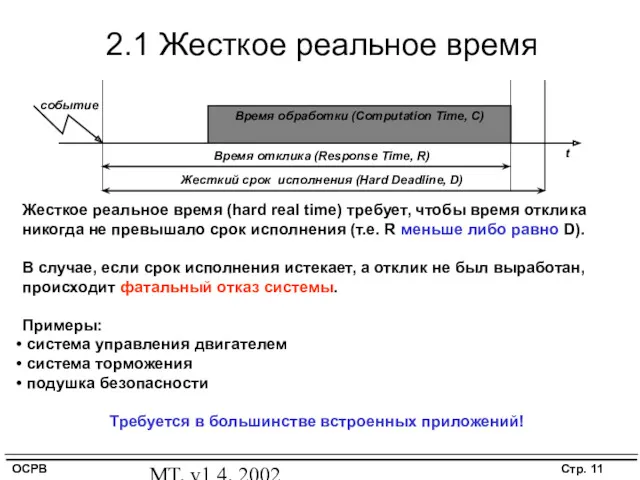
- 11. MT, v1.4, 2002 2.1 Жесткое реальное время t Время отклика (Response Time, R) Жесткий срок исполнения
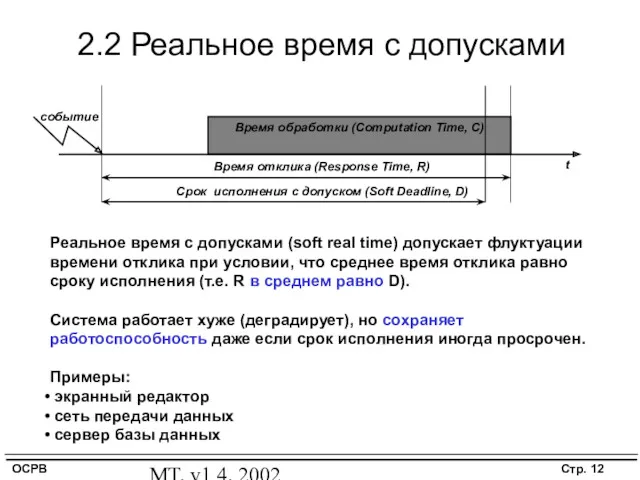
- 12. MT, v1.4, 2002 2.2 Реальное время с допусками t Время отклика (Response Time, R) Срок исполнения
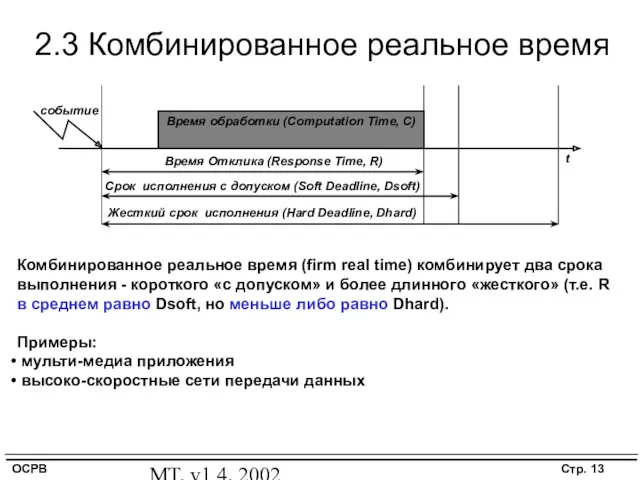
- 13. MT, v1.4, 2002 2.3 Комбинированное реальное время t Время Отклика (Response Time, R) Срок исполнения с
- 14. MT, v1.4, 2002 2.4 Классификация и примеры событий По времени возникновения По типу возникновения Периодические (periodic)
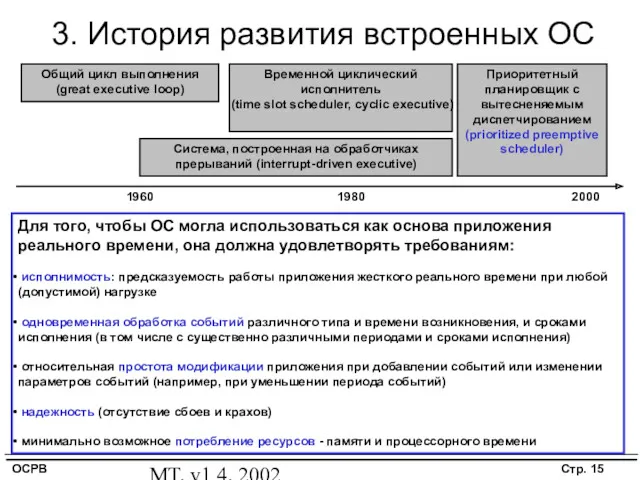
- 15. MT, v1.4, 2002 3. История развития встроенных ОС Общий цикл выполнения (great executive loop) Система, построенная
- 16. MT, v1.4, 2002 3.1 Временной циклический исполнитель EventD (каждые 8мс) EventC (каждые 4мс) EventB (каждые 2мс)
- 17. MT, v1.4, 2002 3.2 Система, управляемая прерываниями Background task Interrupt2 (event2) Interrupt1 (event1) Interrupt3 (event3) executing
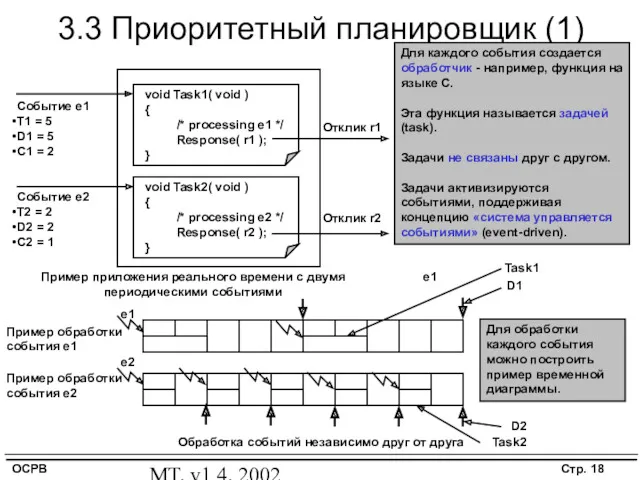
- 18. MT, v1.4, 2002 3.3 Приоритетный планировщик (1) void Task1( void ) { /* processing e1 */
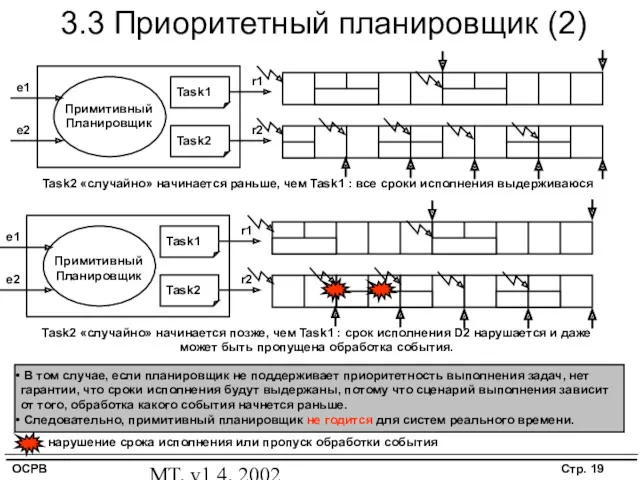
- 19. MT, v1.4, 2002 3.3 Приоритетный планировщик (2) Task2 r2 e2 Примитивный Планировщик e1 Task1 r1 Task2
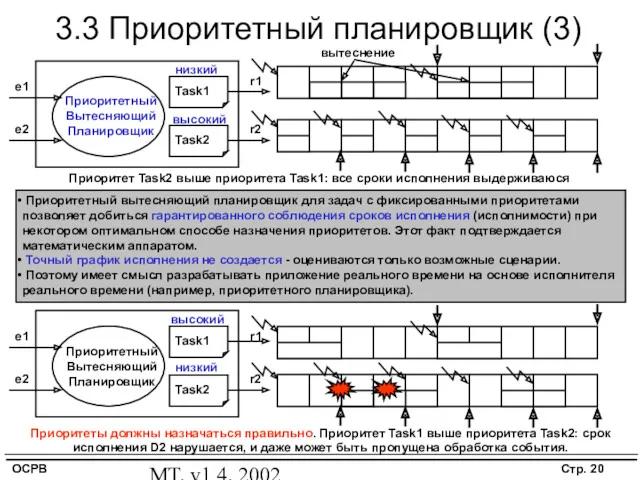
- 20. MT, v1.4, 2002 3.3 Приоритетный планировщик (3) Task2 r2 e2 Приоритетный Вытесняющий Планировщик e1 Task1 r1
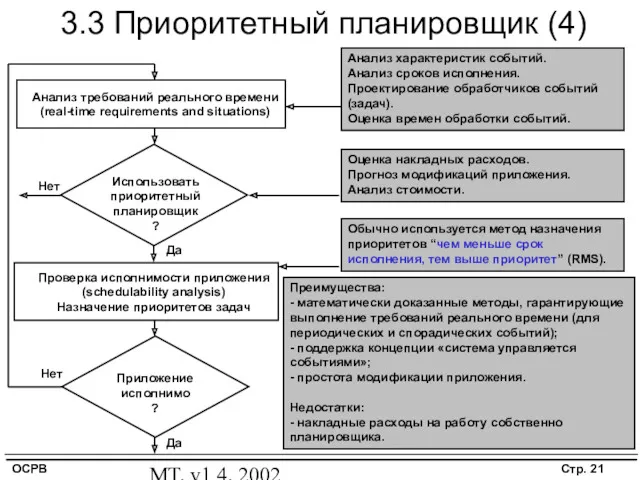
- 21. MT, v1.4, 2002 3.3 Приоритетный планировщик (4) Анализ требований реального времени (real-time requirements and situations) Использовать
- 22. MT, v1.4, 2002 4. Характеристики встроенных ОС (1) Управление задачами Управление прерываниями Управление синхронизацией задач Планировщик
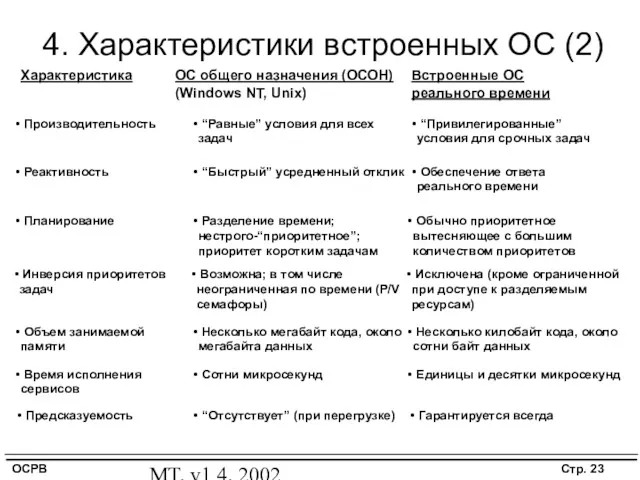
- 23. MT, v1.4, 2002 4. Характеристики встроенных ОС (2) Характеристика Производительность ОС общего назначения (ОСОН) (Windows NT,
- 24. MT, v1.4, 2002 4. Характеристики встроенных ОС (3) t2 t1 RMS (приоритет t1 выше приоритета t2):
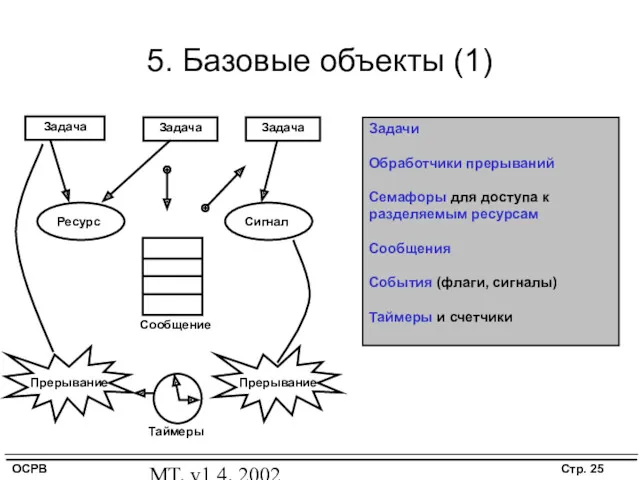
- 25. MT, v1.4, 2002 5. Базовые объекты (1) Задача Задача Задача Прерывание Прерывание Ресурс Сообщение Сигнал Таймеры
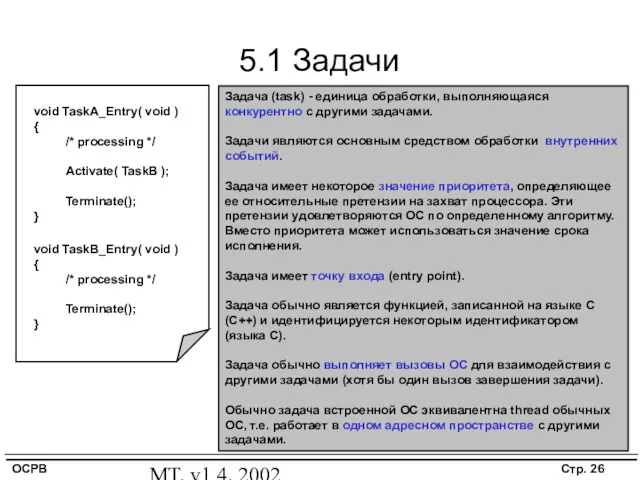
- 26. MT, v1.4, 2002 Задача (task) - единица обработки, выполняющаяся конкурентно с другими задачами. Задачи являются основным
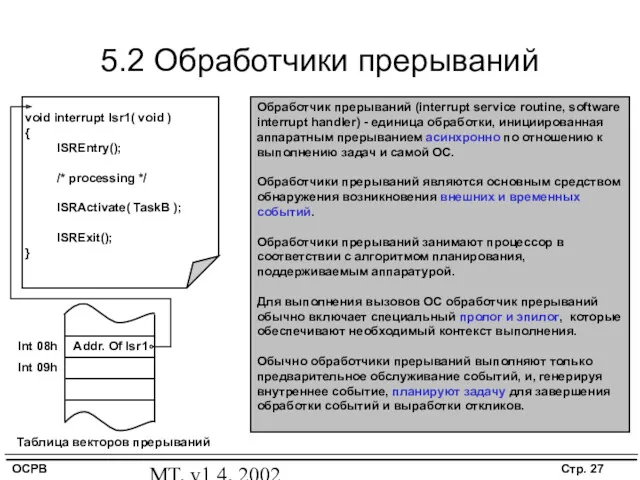
- 27. MT, v1.4, 2002 Обработчик прерываний (interrupt service routine, software interrupt handler) - единица обработки, инициированная аппаратным
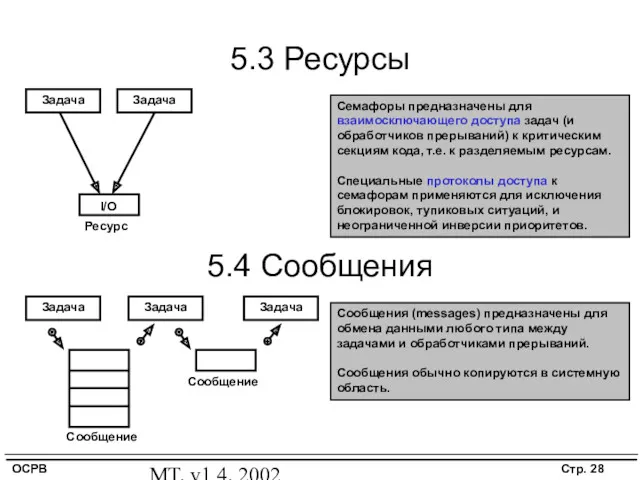
- 28. MT, v1.4, 2002 Семафоры предназначены для взаимосключающего доступа задач (и обработчиков прерываний) к критическим секциям кода,
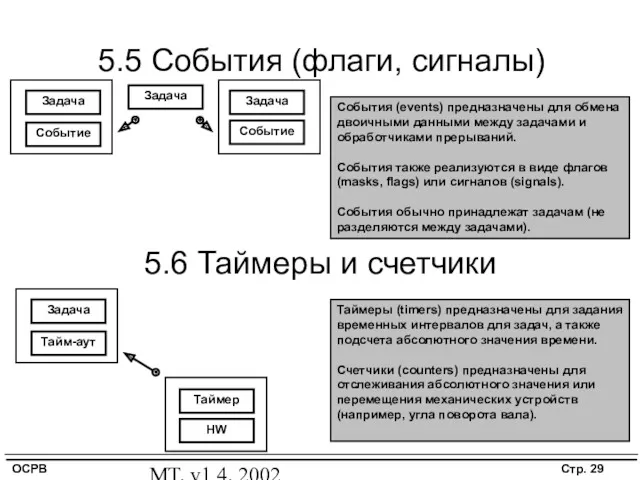
- 29. MT, v1.4, 2002 События (events) предназначены для обмена двоичными данными между задачами и обработчиками прерываний. События
- 30. MT, v1.4, 2002 5.7 Базовые объекты (пример) Driver Task Screen Task Разделяемый Ресурс (ОЗУ экрана) ScanCode
- 31. MT, v1.4, 2002 6. Планирование и диспетчеризация (1) Running Ready 1. Schedule 2. Dispatch Inactive Состояния
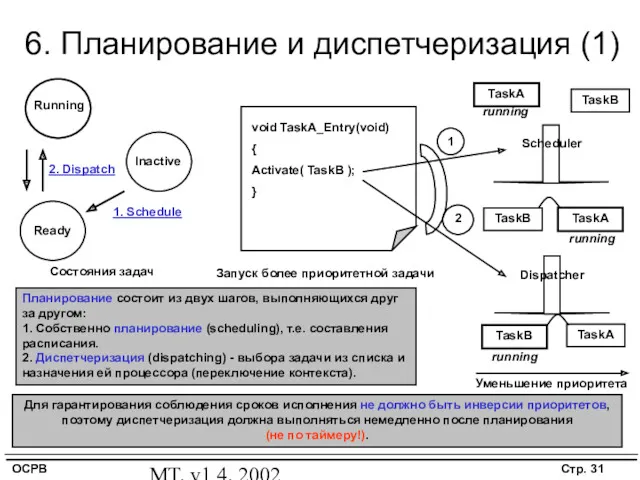
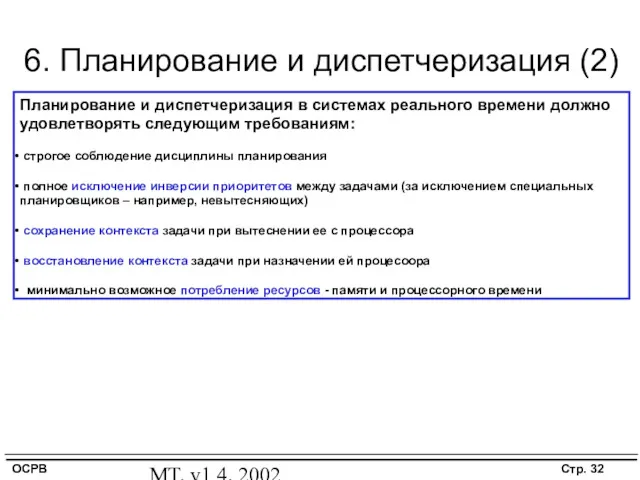
- 32. MT, v1.4, 2002 6. Планирование и диспетчеризация (2) Планирование и диспетчеризация в системах реального времени должно
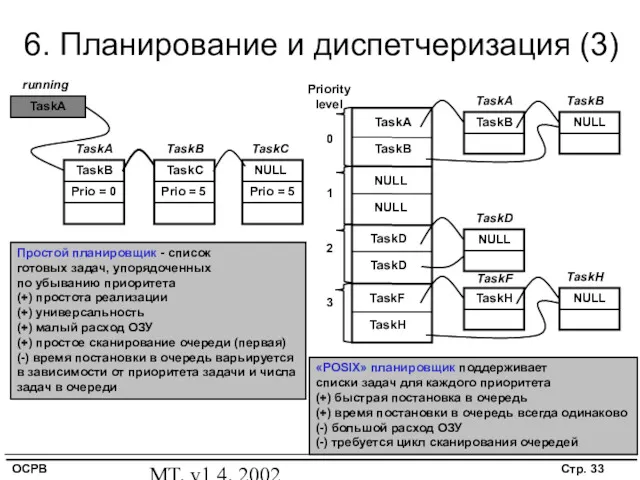
- 33. MT, v1.4, 2002 6. Планирование и диспетчеризация (3) Простой планировщик - список готовых задач, упорядоченных по
- 34. MT, v1.4, 2002 6. Планирование и диспетчеризация (4) void TaskA_Entry(void) { Activate( TaskB ); } TaskA
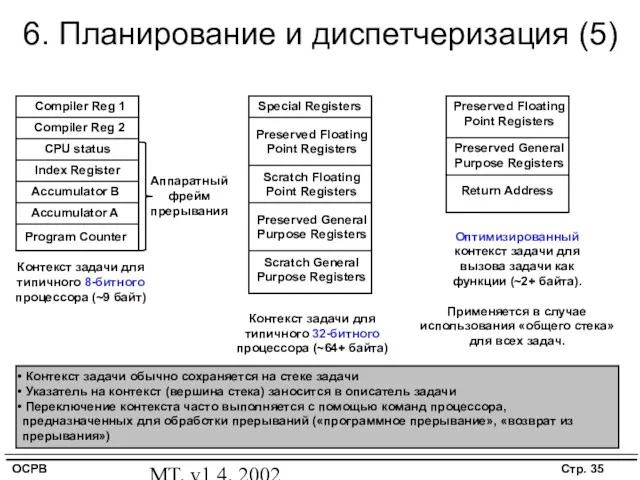
- 35. MT, v1.4, 2002 6. Планирование и диспетчеризация (5) Program Counter Accumulator B Index Register CPU status
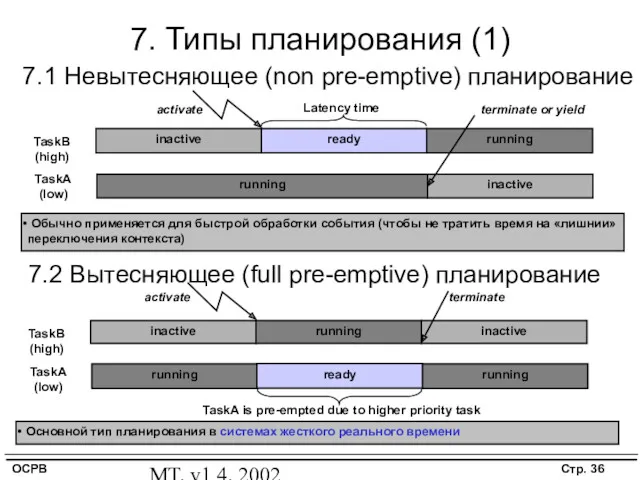
- 36. MT, v1.4, 2002 7. Типы планирования (1) 7.1 Невытесняющее (non pre-emptive) планирование terminate or yield Latency
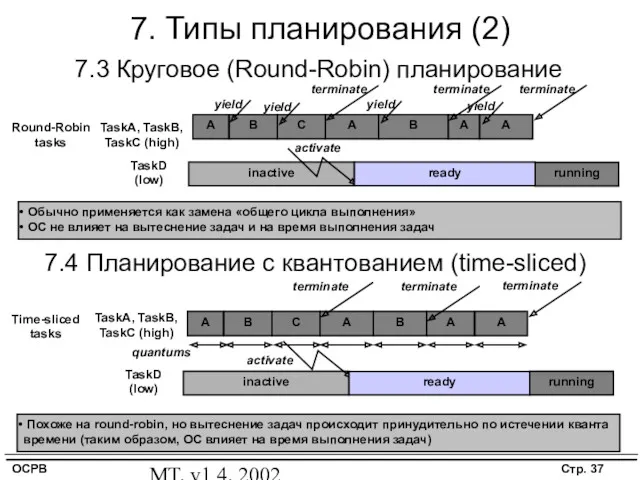
- 37. MT, v1.4, 2002 7. Типы планирования (2) 7.3 Круговое (Round-Robin) планирование terminate TaskA, TaskB, TaskC (high)
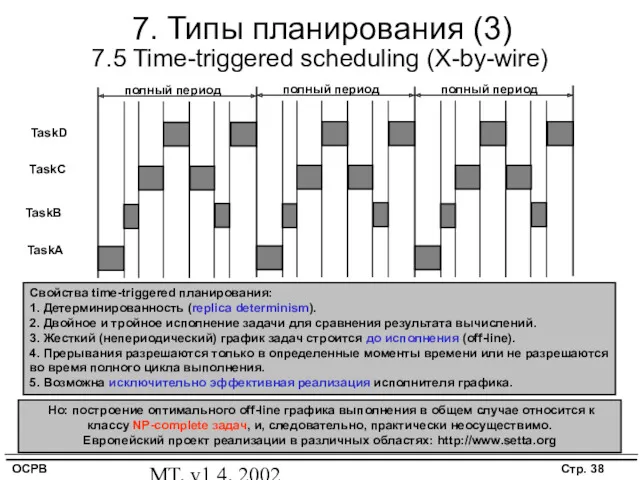
- 38. MT, v1.4, 2002 7. Типы планирования (3) 7.5 Time-triggered scheduling (X-by-wire) TaskD TaskC TaskB TaskA Свойства
- 39. MT, v1.4, 2002 8. Управление задачами (1) Для того, чтобы обработка внутренних событий выполнялась в реальном
- 40. MT, v1.4, 2002 8. Управление задачами (2) Inactive Terminate (itself) Activate Dispatch To Running Yield Dispatch
- 41. MT, v1.4, 2002 8. Управление задачами (3) Link Entry Point (*f)() Priority TaskID TaskID TaskID Link
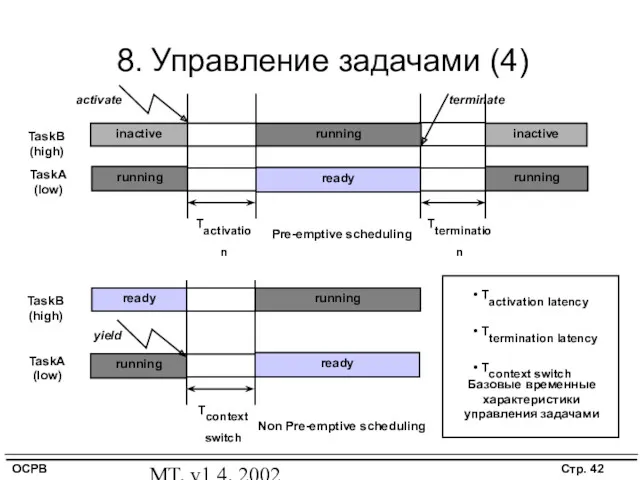
- 42. MT, v1.4, 2002 8. Управление задачами (4) terminate TaskB (high) TaskA (low) running running inactive inactive
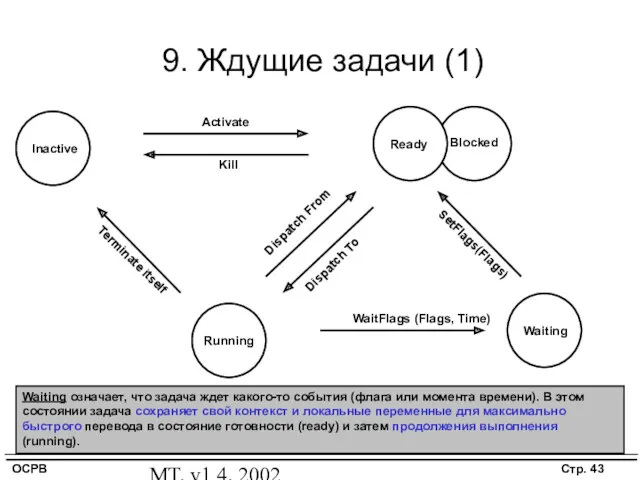
- 43. MT, v1.4, 2002 9. Ждущие задачи (1) Inactive Terminate itself Activate Dispatch To Running Dispatch From
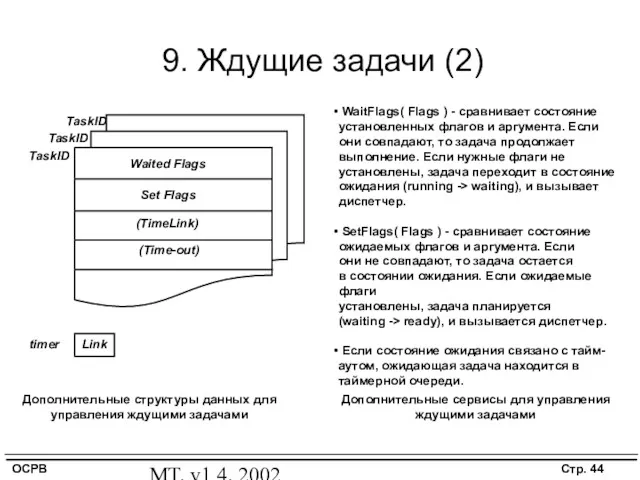
- 44. MT, v1.4, 2002 9. Ждущие задачи (2) Waited Flags Set Flags TaskID TaskID TaskID Дополнительные структуры
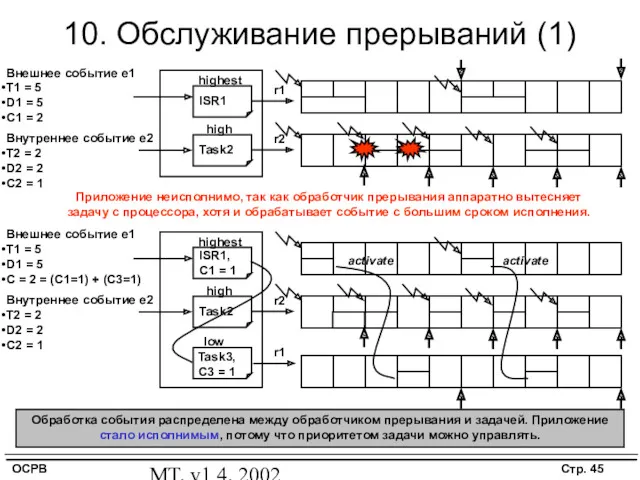
- 45. MT, v1.4, 2002 10. Обслуживание прерываний (1) Task2 r2 ISR1 r1 highest high Внешнее событие e1
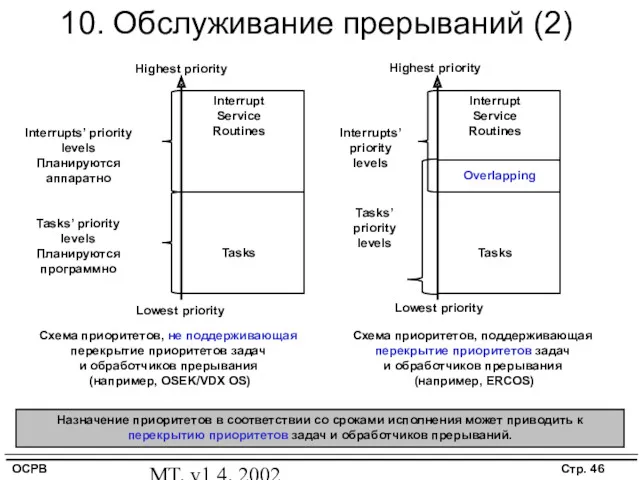
- 46. MT, v1.4, 2002 10. Обслуживание прерываний (2) Highest priority Lowest priority Interrupts’ priority levels Планируются аппаратно
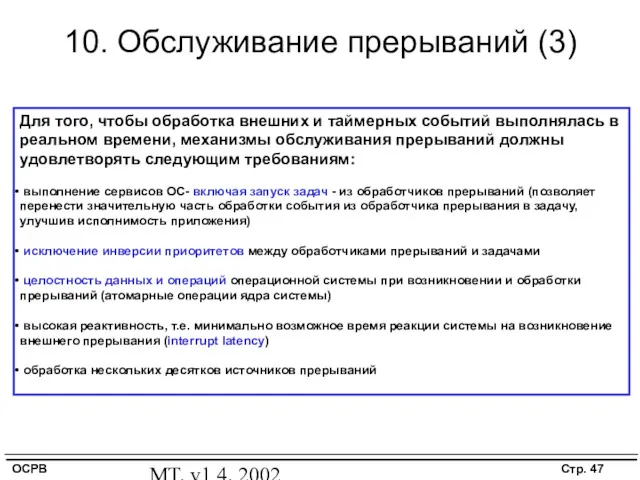
- 47. MT, v1.4, 2002 10. Обслуживание прерываний (3) Для того, чтобы обработка внешних и таймерных событий выполнялась
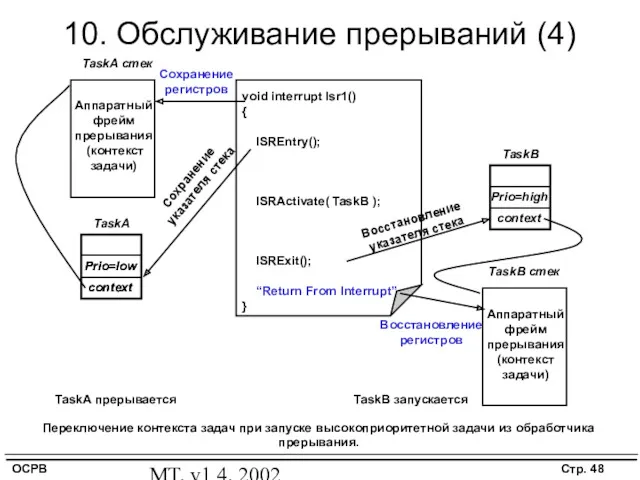
- 48. MT, v1.4, 2002 10. Обслуживание прерываний (4) void interrupt Isr1() { ISREntry(); ISRActivate( TaskB ); ISRExit();
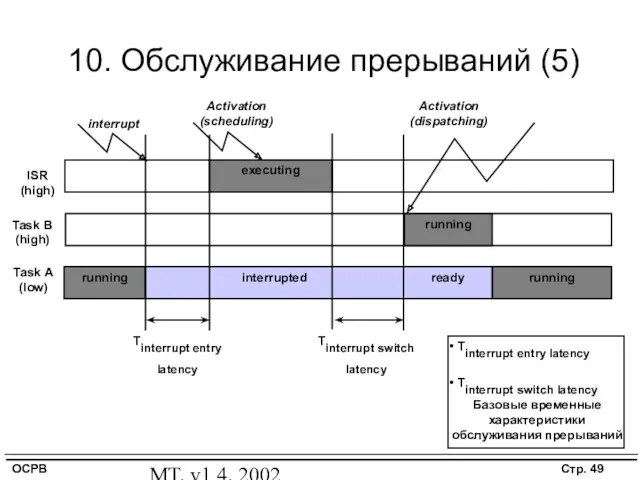
- 49. MT, v1.4, 2002 10. Обслуживание прерываний (5) Task A (low) Task B (high) ISR (high) running
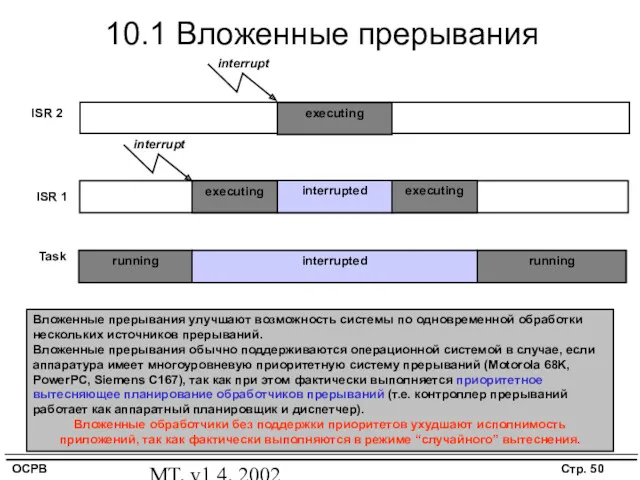
- 50. MT, v1.4, 2002 10.1 Вложенные прерывания Task ISR 2 ISR 1 running executing running interrupted interrupt
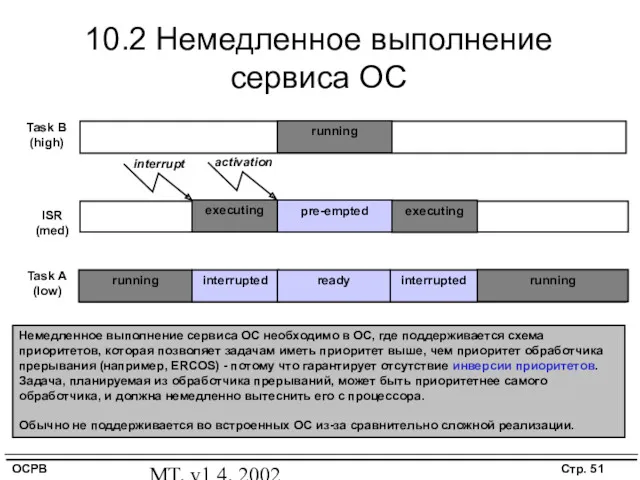
- 51. MT, v1.4, 2002 10.2 Немедленное выполнение сервиса ОС Task A (low) Task B (high) ISR (med)
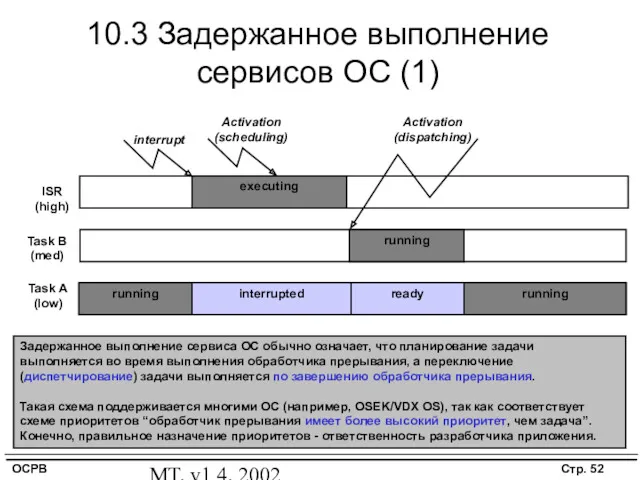
- 52. MT, v1.4, 2002 10.3 Задержанное выполнение сервисов ОС (1) Task A (low) Task B (med) ISR
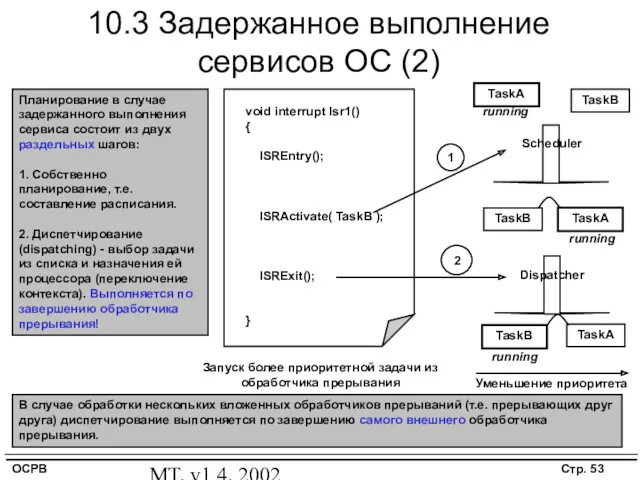
- 53. MT, v1.4, 2002 10.3 Задержанное выполнение сервисов ОС (2) Планирование в случае задержанного выполнения сервиса состоит
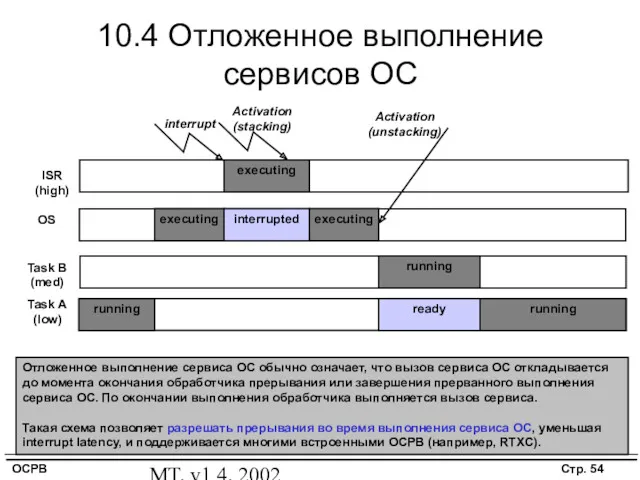
- 54. MT, v1.4, 2002 10.4 Отложенное выполнение сервисов ОС Task A (low) Task B (med) ISR (high)
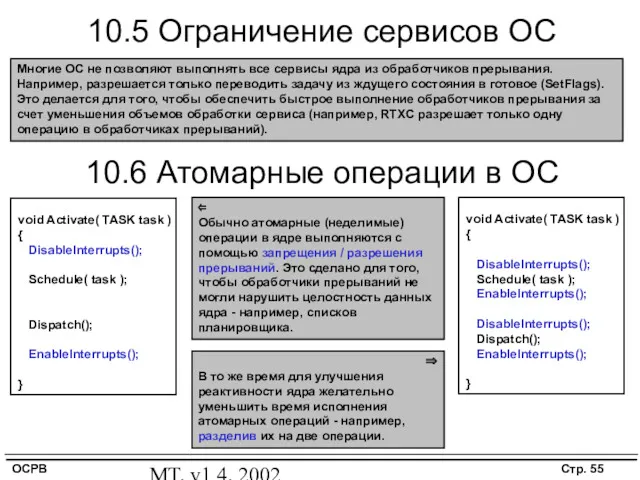
- 55. MT, v1.4, 2002 10.5 Ограничение сервисов ОС Многие ОС не позволяют выполнять все сервисы ядра из
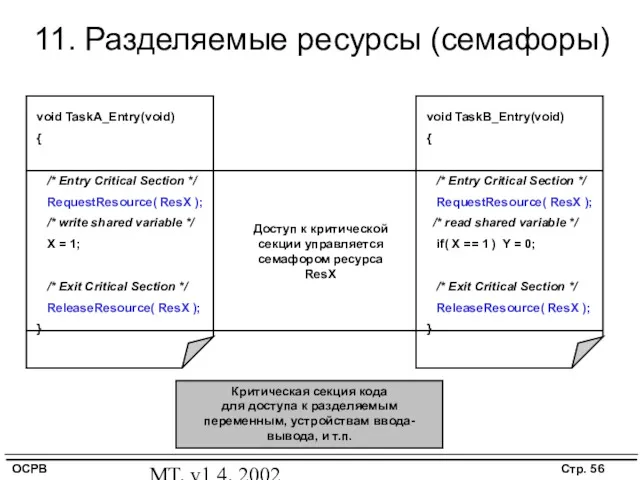
- 56. MT, v1.4, 2002 11. Разделяемые ресурсы (семафоры) void TaskA_Entry(void) { /* Entry Critical Section */ RequestResource(
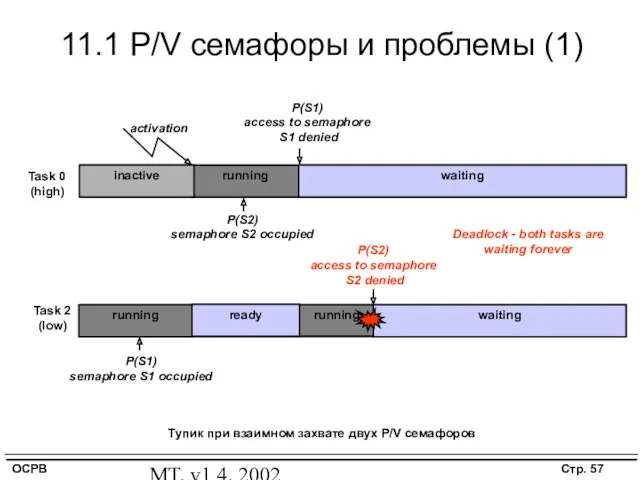
- 57. MT, v1.4, 2002 11.1 P/V семафоры и проблемы (1) Task 2 (low) Task 0 (high) running
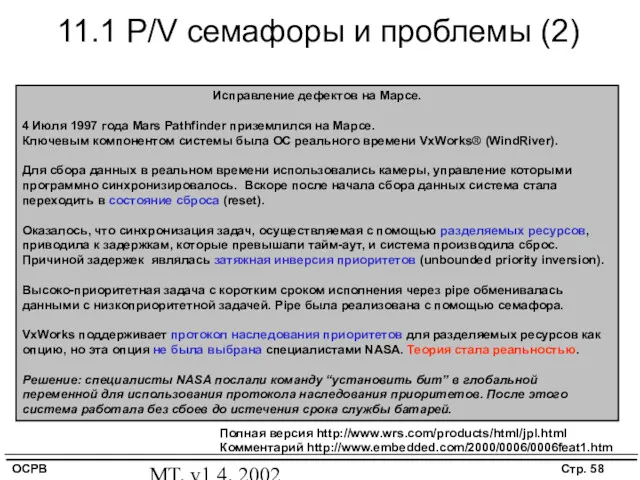
- 58. MT, v1.4, 2002 11.1 P/V семафоры и проблемы (2) Полная версия http://www.wrs.com/products/html/jpl.html Комментарий http://www.embedded.com/2000/0006/0006feat1.htm Исправление дефектов
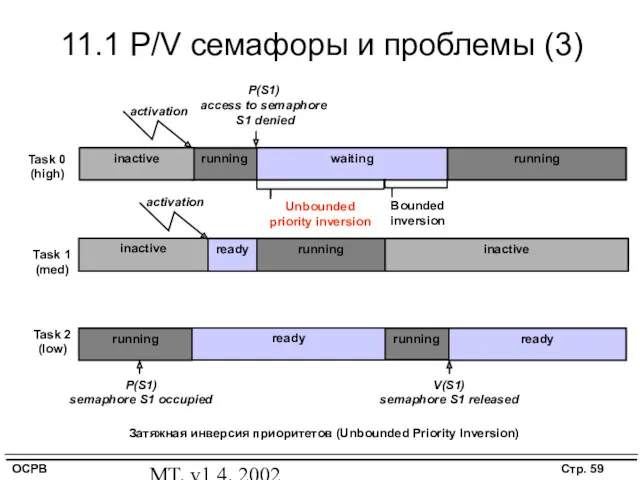
- 59. MT, v1.4, 2002 11.1 P/V семафоры и проблемы (3) Task 2 (low) Task 0 (high) Task
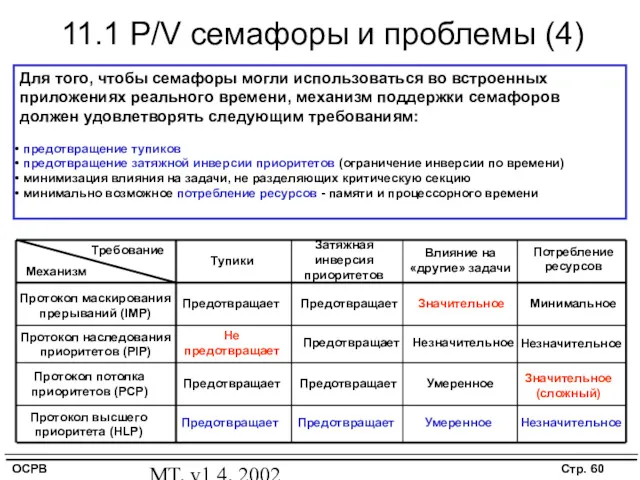
- 60. MT, v1.4, 2002 11.1 P/V семафоры и проблемы (4) Для того, чтобы семафоры могли использоваться во
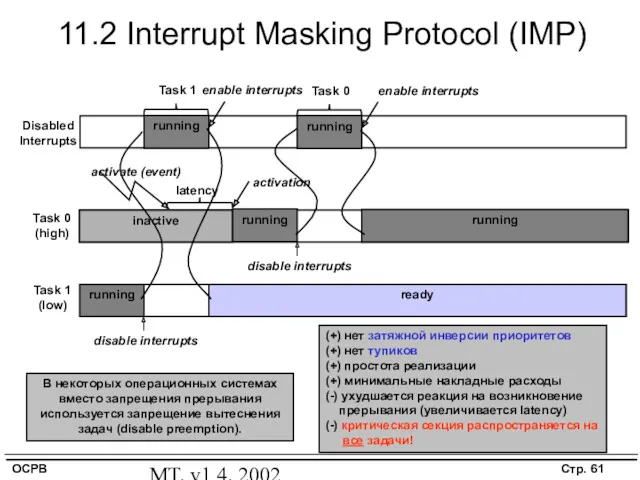
- 61. MT, v1.4, 2002 11.2 Interrupt Masking Protocol (IMP) Task 1 (low) Disabled Interrupts Task 0 (high)
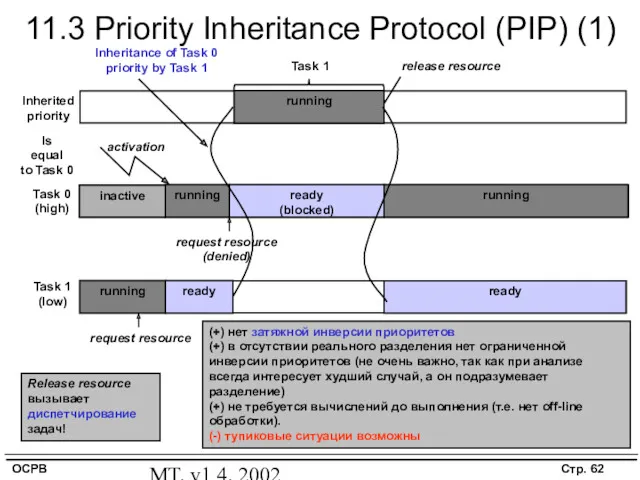
- 62. MT, v1.4, 2002 11.3 Priority Inheritance Protocol (PIP) (1) Task 1 (low) Inherited priority Task 0
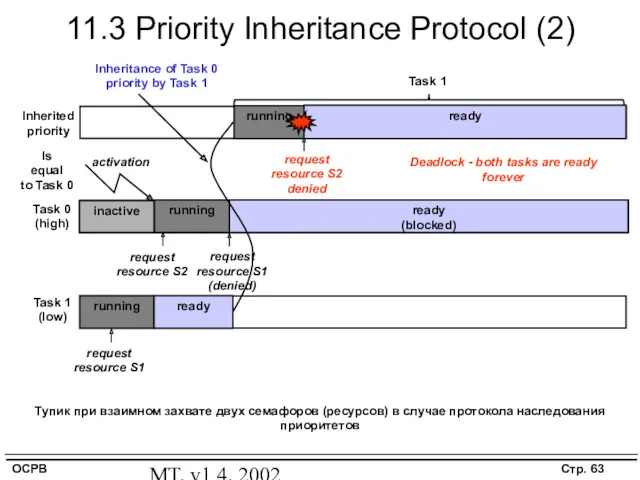
- 63. MT, v1.4, 2002 11.3 Priority Inheritance Protocol (2) Task 1 (low) Inherited priority Task 0 (high)
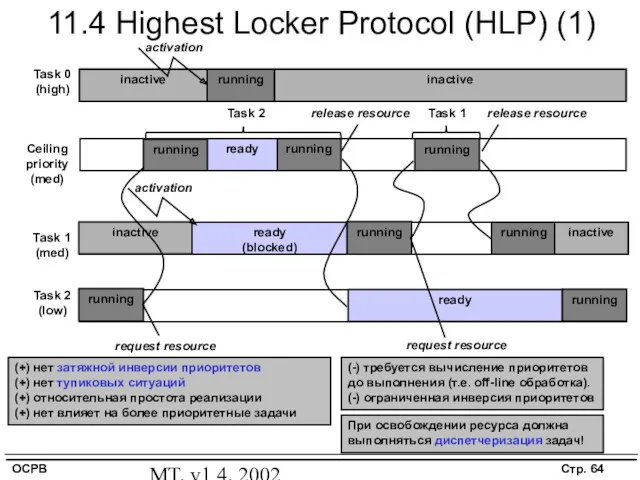
- 64. MT, v1.4, 2002 11.4 Highest Locker Protocol (HLP) (1) Task 2 (low) Ceiling priority (med) Task
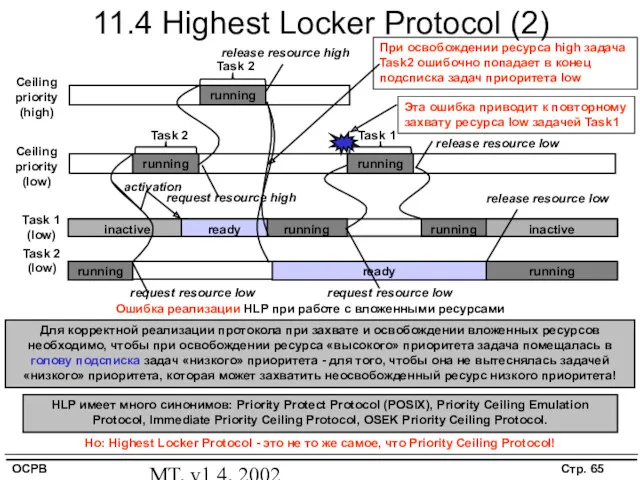
- 65. MT, v1.4, 2002 11.4 Highest Locker Protocol (2) Task 2 (low) Ceiling priority (low) Task 1
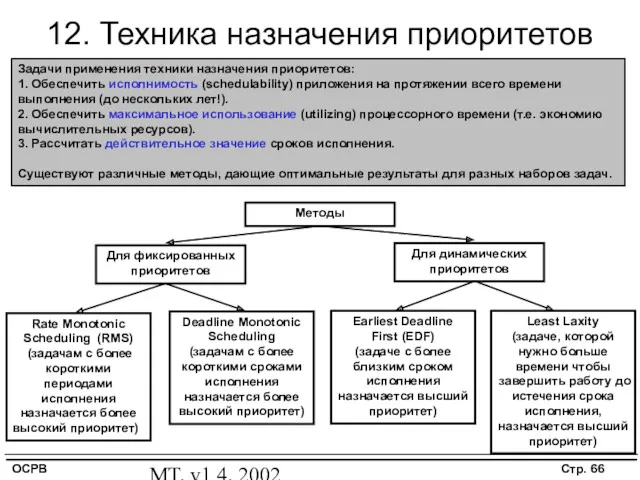
- 66. MT, v1.4, 2002 12. Техника назначения приоритетов Задачи применения техники назначения приоритетов: 1. Обеспечить исполнимость (schedulability)
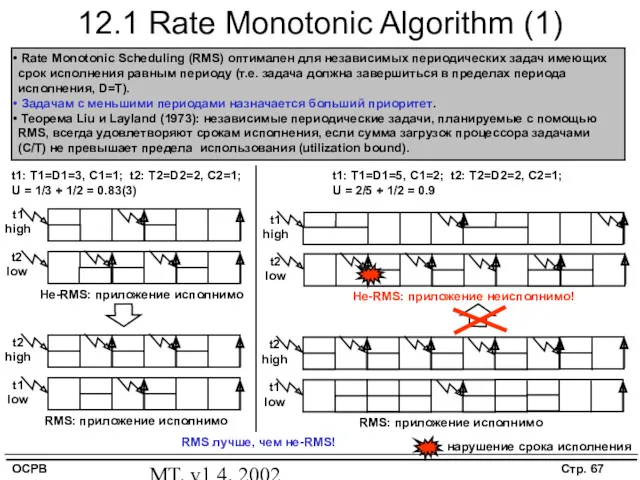
- 67. MT, v1.4, 2002 12.1 Rate Monotonic Algorithm (1) Rate Monotonic Scheduling (RMS) оптимален для независимых периодических
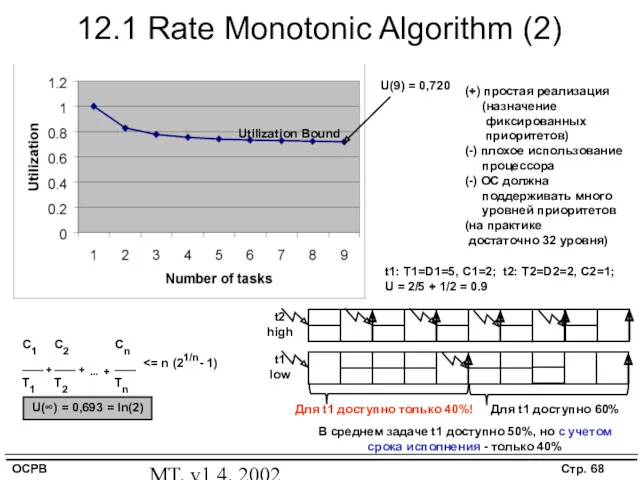
- 68. MT, v1.4, 2002 12.1 Rate Monotonic Algorithm (2) C1 —— + T1 C2 —— + T2
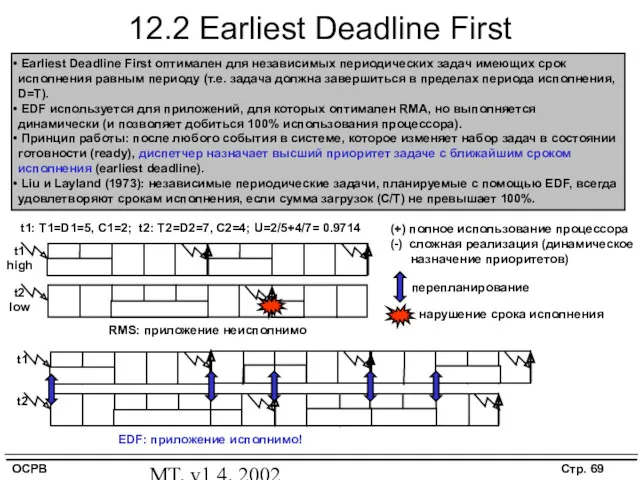
- 69. MT, v1.4, 2002 12.2 Earliest Deadline First Earliest Deadline First оптимален для независимых периодических задач имеющих
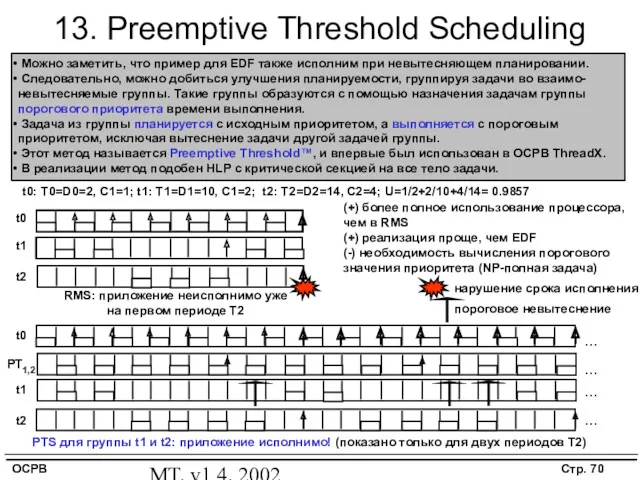
- 70. MT, v1.4, 2002 13. Preemptive Threshold Scheduling t2 t1 t0 t2 t1 t0 PT1,2 … …
- 71. MT, v1.4, 2002 14. Сетевая передача данных (1) Volvo S80 имеет две сети передачи данных: высокоскоростную
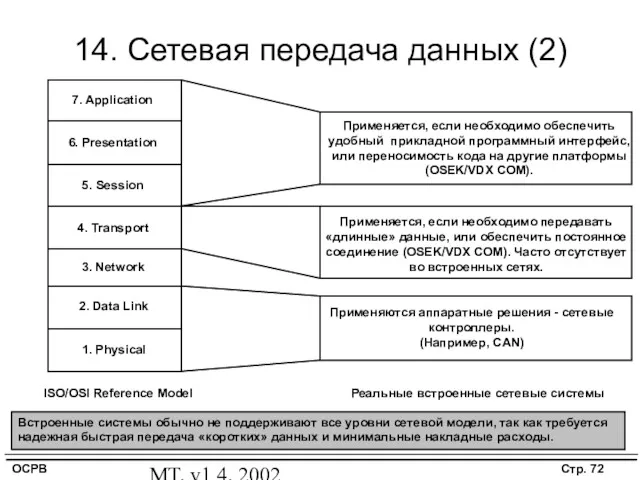
- 72. MT, v1.4, 2002 14. Сетевая передача данных (2) 7. Application 6. Presentation 5. Session 4. Transport
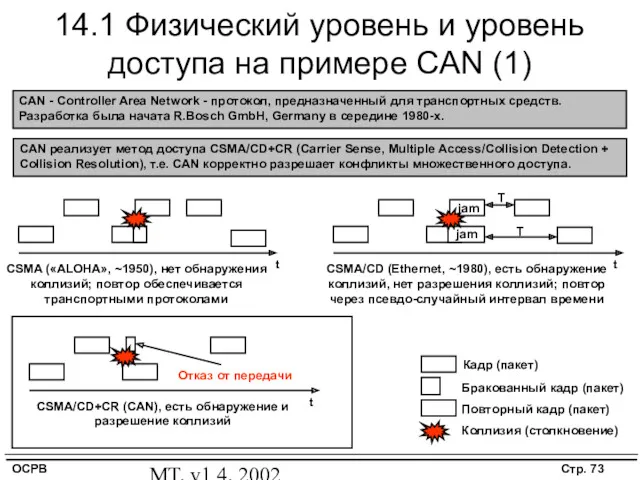
- 73. MT, v1.4, 2002 14.1 Физический уровень и уровень доступа на примере CAN (1) CAN - Controller
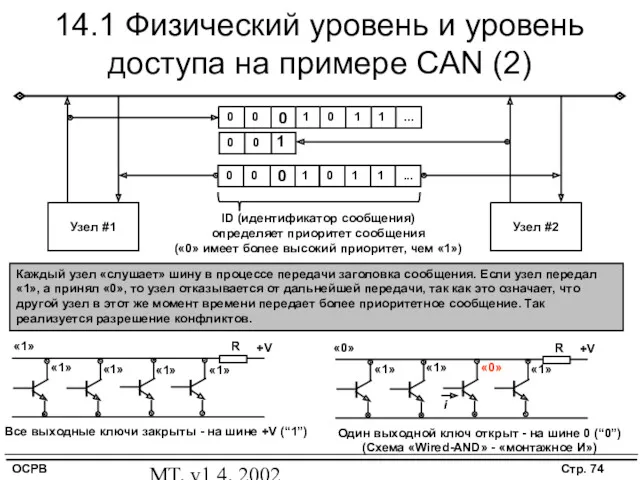
- 74. MT, v1.4, 2002 14.1 Физический уровень и уровень доступа на примере CAN (2) Узел #1 Узел
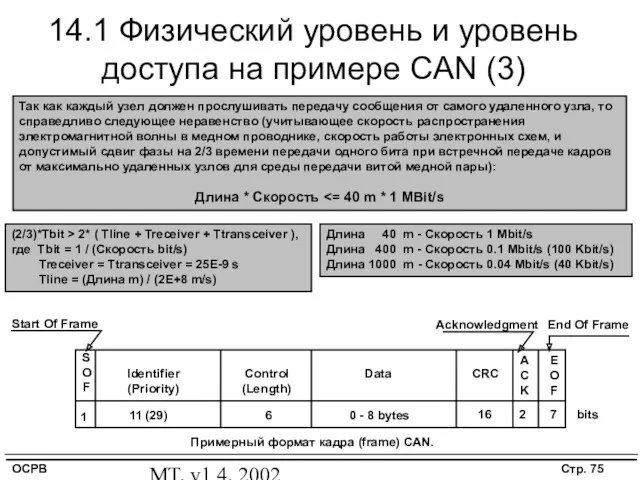
- 75. MT, v1.4, 2002 14.1 Физический уровень и уровень доступа на примере CAN (3) Так как каждый
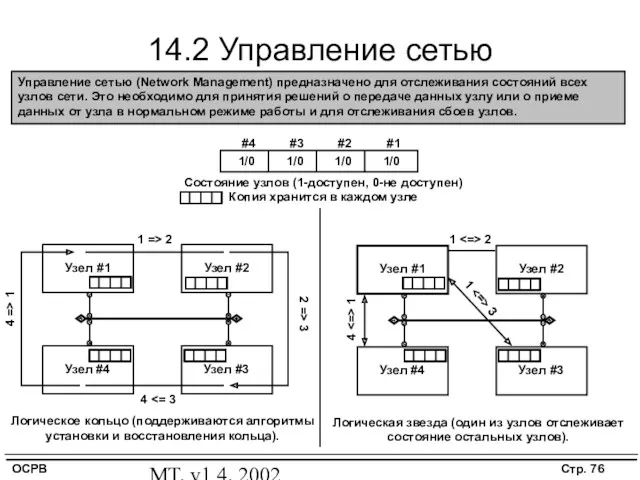
- 76. MT, v1.4, 2002 14.2 Управление сетью Управление сетью (Network Management) предназначено для отслеживания состояний всех узлов
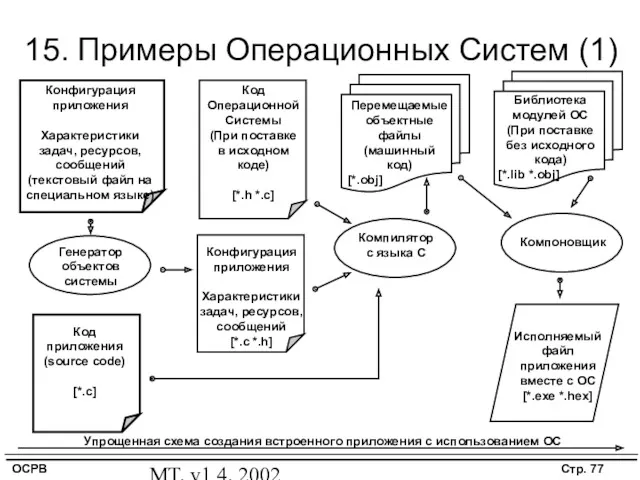
- 77. MT, v1.4, 2002 15. Примеры Операционных Систем (1) Код приложения (source code) [*.c] Конфигурация приложения Характеристики
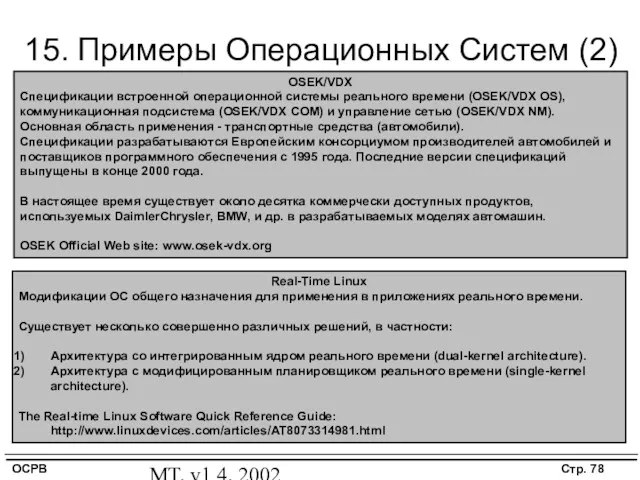
- 78. MT, v1.4, 2002 15. Примеры Операционных Систем (2) OSEK/VDX Спецификации встроенной операционной системы реального времени (OSEK/VDX
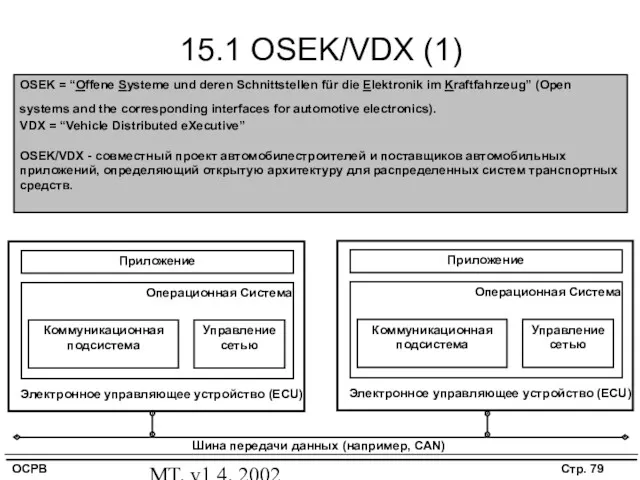
- 79. MT, v1.4, 2002 15.1 OSEK/VDX (1) OSEK = “Offene Systeme und deren Schnittstellen für die Elektronik
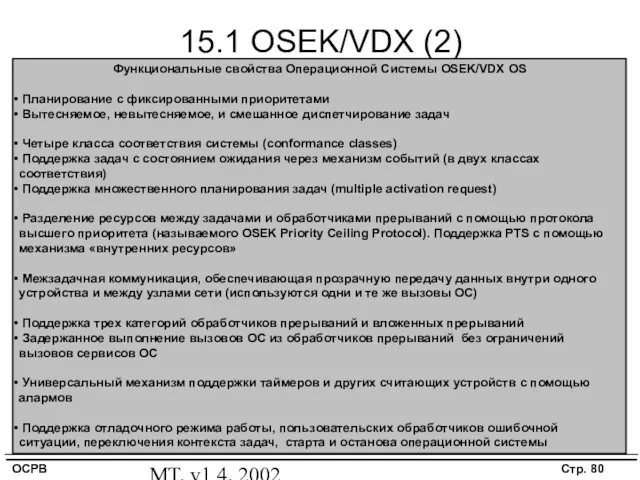
- 80. MT, v1.4, 2002 15.1 OSEK/VDX (2) Функциональные свойства Операционной Системы OSEK/VDX OS Планирование с фиксированными приоритетами
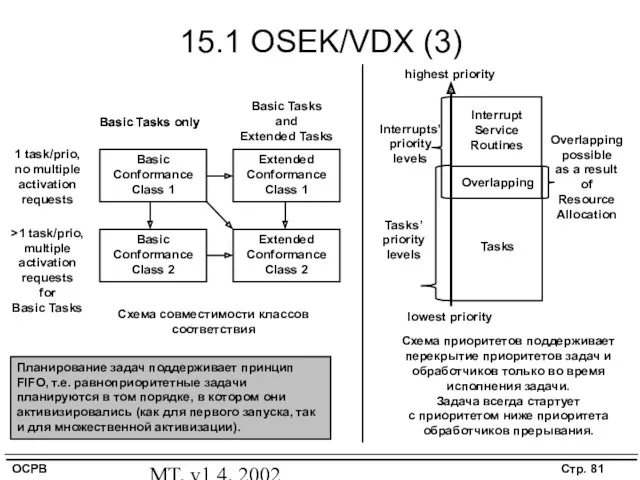
- 81. MT, v1.4, 2002 15.1 OSEK/VDX (3) Схема совместимости классов соответствия Basic Conformance Class 1 Basic Conformance
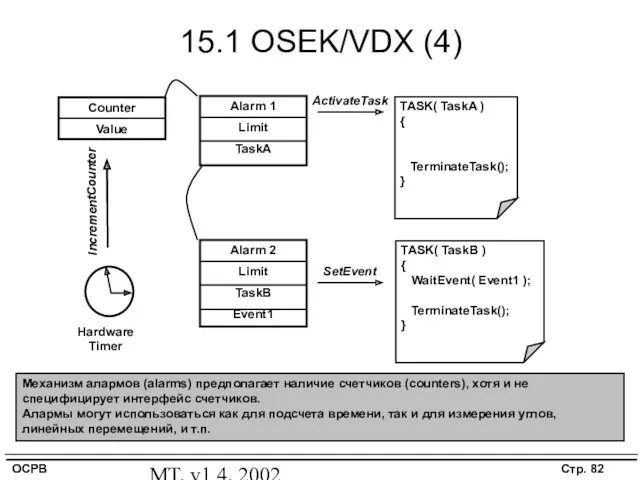
- 82. MT, v1.4, 2002 15.1 OSEK/VDX (4) Counter Value Alarm 1 Limit TaskA Alarm 2 Limit TaskB
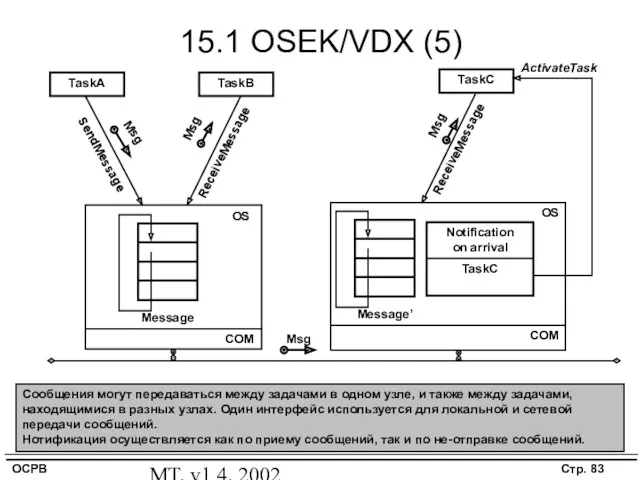
- 83. MT, v1.4, 2002 15.1 OSEK/VDX (5) Сообщения могут передаваться между задачами в одном узле, и также
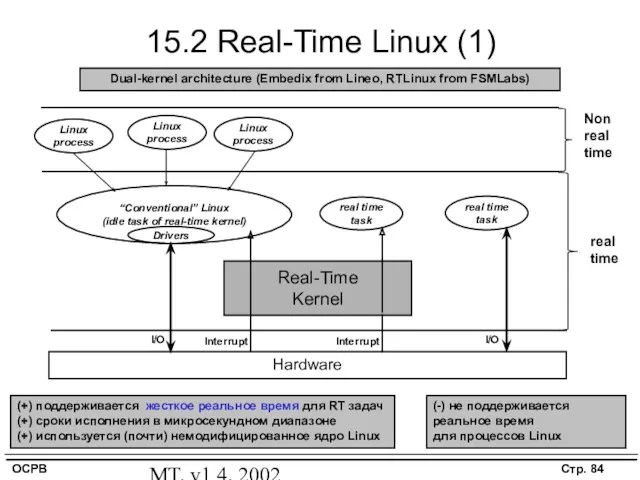
- 84. MT, v1.4, 2002 15.2 Real-Time Linux (1) Hardware Real-Time Kernel real time task real time task
- 86. Скачать презентацию
MT, v1.4, 2002
План (1)
1. Введение
2. Определение “реального времени”
2.1 Жесткое реальное время
MT, v1.4, 2002
План (1)
1. Введение
2. Определение “реального времени”
2.1 Жесткое реальное время
MT, v1.4, 2002
План (2)
5. Базовые объекты
5.1 задачи
5.2 обработчики прерываний
5.3 ресурсы (семафоры)
5.4
MT, v1.4, 2002
План (2)
5. Базовые объекты
5.1 задачи
5.2 обработчики прерываний
5.3 ресурсы (семафоры)
5.4
MT, v1.4, 2002
План (3)
10. Обслуживание прерываний:
10.1 вложенные прерывания
10.2 немедленное выполнение сервиса
MT, v1.4, 2002
План (3)
10. Обслуживание прерываний:
10.1 вложенные прерывания
10.2 немедленное выполнение сервиса
MT, v1.4, 2002
План (4)
12. Техника назначения приоритетов:
12.1 Последовательное увеличение приоритетов (RMA)
12.2
MT, v1.4, 2002
План (4)
12. Техника назначения приоритетов:
12.1 Последовательное увеличение приоритетов (RMA)
12.2
MT, v1.4, 2002
Ресурсы Интернет
A. News: comp.realtime, comp.arch.embedded
B. http://www.embedded.com (Embedded System Programming,
MT, v1.4, 2002
Ресурсы Интернет
A. News: comp.realtime, comp.arch.embedded
B. http://www.embedded.com (Embedded System Programming,
MT, v1.4, 2002
1. Введение (1)
Встроенные системы (embedded systems) - программные системы,
MT, v1.4, 2002
1. Введение (1)
Встроенные системы (embedded systems) - программные системы,
MT, v1.4, 2002
1. Введение (2)
Электронный
карбюратор
Датчик
давления
во входном
коллекторе
Двигатель
Лямбда датчик
Катали-
затор
Управление
дроссельной
заслонкой
Воздух
Топливо
Выхлоп для дожигания
Микроконтроллер
Подача топлива
Давление смеси
MT, v1.4, 2002
1. Введение (2)
Электронный
карбюратор
Датчик
давления
во входном
коллекторе
Двигатель
Лямбда датчик
Катали-
затор
Управление
дроссельной
заслонкой
Воздух
Топливо
Выхлоп для дожигания
Микроконтроллер
Подача топлива
Давление смеси
MT, v1.4, 2002
2. Определение «реального времени» (1)
События
(Events)
T (time)
Система (приложение) реального времени
MT, v1.4, 2002
2. Определение «реального времени» (1)
События
(Events)
T (time)
Система (приложение) реального времени
MT, v1.4, 2002
2. Определение «реального времени» (2)
Обработка
Событие
(event)
Отклик
(service, response)
t
Время отклика (Response Time,
MT, v1.4, 2002
2. Определение «реального времени» (2)
Обработка
Событие
(event)
Отклик
(service, response)
t
Время отклика (Response Time,
MT, v1.4, 2002
2.1 Жесткое реальное время
t
Время отклика (Response Time, R)
Жесткий срок
MT, v1.4, 2002
2.1 Жесткое реальное время
t
Время отклика (Response Time, R)
Жесткий срок
MT, v1.4, 2002
2.2 Реальное время с допусками
t
Время отклика (Response Time, R)
Срок
MT, v1.4, 2002
2.2 Реальное время с допусками
t
Время отклика (Response Time, R)
Срок
MT, v1.4, 2002
2.3 Комбинированное реальное время
t
Время Отклика (Response Time, R)
Срок исполнения
MT, v1.4, 2002
2.3 Комбинированное реальное время
t
Время Отклика (Response Time, R)
Срок исполнения

MT, v1.4, 2002
2.4 Классификация и примеры событий
По времени
возникновения
По типу
возникновения
Периодические
(periodic)
Спорадические
(sporadic)
Апериодические
(aperiodic)
t
T
T
t
τ
τ
t
Внешние
события
MT, v1.4, 2002
2.4 Классификация и примеры событий
По времени
возникновения
По типу
возникновения
Периодические
(periodic)
Спорадические
(sporadic)
Апериодические
(aperiodic)
t
T
T
t
τ
τ
t
Внешние события
MT, v1.4, 2002
3. История развития встроенных ОС
Общий цикл выполнения
(great
MT, v1.4, 2002
3. История развития встроенных ОС
Общий цикл выполнения
(great

MT, v1.4, 2002
3.1 Временной циклический исполнитель
EventD
(каждые 8мс)
EventC
(каждые 4мс)
EventB
(каждые 2мс)
EventA
(каждую 1мс)
Временной циклический
MT, v1.4, 2002
3.1 Временной циклический исполнитель
EventD
(каждые 8мс)
EventC
(каждые 4мс)
EventB
(каждые 2мс)
EventA
(каждую 1мс)
Временной циклический

MT, v1.4, 2002
3.2 Система, управляемая прерываниями
Background
task
Interrupt2
(event2)
Interrupt1
(event1)
Interrupt3
(event3)
executing
BG
task
interrupt1
interrupt2
interrupt3
executing
executing
executing
executing
executing
running
Система, построенная на обработчиках прерываний (interrupt-driven
MT, v1.4, 2002
3.2 Система, управляемая прерываниями
Background
task
Interrupt2
(event2)
Interrupt1
(event1)
Interrupt3
(event3)
executing
BG
task
interrupt1
interrupt2
interrupt3
executing
executing
executing
executing
executing
running
Система, построенная на обработчиках прерываний (interrupt-driven
MT, v1.4, 2002
3.3 Приоритетный планировщик (1)
void Task1( void )
{
/* processing e1
MT, v1.4, 2002
3.3 Приоритетный планировщик (1)
void Task1( void )
{
/* processing e1
MT, v1.4, 2002
3.3 Приоритетный планировщик (2)
Task2
r2
e2
Примитивный
Планировщик
e1
Task1
r1
Task2 «случайно» начинается раньше, чем Task1
MT, v1.4, 2002
3.3 Приоритетный планировщик (2)
Task2
r2
e2
Примитивный
Планировщик
e1
Task1
r1
Task2 «случайно» начинается раньше, чем Task1
MT, v1.4, 2002
3.3 Приоритетный планировщик (3)
Task2
r2
e2
Приоритетный
Вытесняющий
Планировщик
e1
Task1
r1
низкий
высокий
Приоритет Task2 выше приоритета Task1: все
MT, v1.4, 2002
3.3 Приоритетный планировщик (3)
Task2
r2
e2
Приоритетный
Вытесняющий
Планировщик
e1
Task1
r1
низкий
высокий
Приоритет Task2 выше приоритета Task1: все
MT, v1.4, 2002
3.3 Приоритетный планировщик (4)
Анализ требований реального времени
(real-time requirements and
MT, v1.4, 2002
3.3 Приоритетный планировщик (4)
Анализ требований реального времени
(real-time requirements and

MT, v1.4, 2002
4. Характеристики встроенных ОС (1)
Управление
задачами
Управление
прерываниями
Управление синхронизацией
задач
Планировщик
и Диспетчер
Сообщения
Сеть
Таймеры
Счетчики
Ядро ОСРВ
(Real-Time
MT, v1.4, 2002
4. Характеристики встроенных ОС (1)
Управление
задачами
Управление
прерываниями
Управление синхронизацией
задач
Планировщик
и Диспетчер
Сообщения
Сеть
Таймеры
Счетчики
Ядро ОСРВ (Real-Time
MT, v1.4, 2002
4. Характеристики встроенных ОС (2)
Характеристика
Производительность
ОС общего назначения
MT, v1.4, 2002
4. Характеристики встроенных ОС (2)
Характеристика
Производительность
ОС общего назначения

MT, v1.4, 2002
4. Характеристики встроенных ОС (3)
t2
t1
RMS (приоритет t1 выше приоритета
MT, v1.4, 2002
4. Характеристики встроенных ОС (3)
t2
t1
RMS (приоритет t1 выше приоритета
MT, v1.4, 2002
5. Базовые объекты (1)
Задача
Задача
Задача
Прерывание
Прерывание
Ресурс
Сообщение
Сигнал
Таймеры
Задачи
Обработчики прерываний
Семафоры для доступа к разделяемым
MT, v1.4, 2002
5. Базовые объекты (1)
Задача
Задача
Задача
Прерывание
Прерывание
Ресурс
Сообщение
Сигнал
Таймеры
Задачи
Обработчики прерываний
Семафоры для доступа к разделяемым
MT, v1.4, 2002
Задача (task) - единица обработки, выполняющаяся конкурентно с другими
MT, v1.4, 2002
Задача (task) - единица обработки, выполняющаяся конкурентно с другими
MT, v1.4, 2002
Обработчик прерываний (interrupt service routine, software interrupt handler) -
MT, v1.4, 2002
Обработчик прерываний (interrupt service routine, software interrupt handler) -
MT, v1.4, 2002
Семафоры предназначены для взаимосключающего доступа задач (и обработчиков прерываний)
MT, v1.4, 2002
Семафоры предназначены для взаимосключающего доступа задач (и обработчиков прерываний)
MT, v1.4, 2002
События (events) предназначены для обмена двоичными данными между задачами
MT, v1.4, 2002
События (events) предназначены для обмена двоичными данными между задачами

MT, v1.4, 2002
5.7 Базовые объекты (пример)
Driver Task
Screen Task
Разделяемый
Ресурс
(ОЗУ экрана)
ScanCode
Flag
Print Task
Scan-code
Scan-code
Scan-code
Character
Character
Character
Timeout
Flag
Wait Request
Wait
MT, v1.4, 2002
5.7 Базовые объекты (пример)
Driver Task
Screen Task
Разделяемый
Ресурс
(ОЗУ экрана)
ScanCode
Flag
Print Task
Scan-code
Scan-code
Scan-code
Character
Character
Character
Timeout
Flag
Wait Request
Wait
MT, v1.4, 2002
6. Планирование и диспетчеризация (1)
Running
Ready
1. Schedule
2. Dispatch
Inactive
Состояния задач
Планирование состоит
MT, v1.4, 2002
6. Планирование и диспетчеризация (1)
Running
Ready
1. Schedule
2. Dispatch
Inactive
Состояния задач
Планирование состоит
MT, v1.4, 2002
6. Планирование и диспетчеризация (2)
Планирование и диспетчеризация в системах
MT, v1.4, 2002
6. Планирование и диспетчеризация (2)
Планирование и диспетчеризация в системах
MT, v1.4, 2002
6. Планирование и диспетчеризация (3)
Простой планировщик - список
готовых задач,
MT, v1.4, 2002
6. Планирование и диспетчеризация (3)
Простой планировщик - список
готовых задач,

MT, v1.4, 2002
6. Планирование и диспетчеризация (4)
void TaskA_Entry(void)
{
Activate( TaskB );
}
TaskA вытесняется
MT, v1.4, 2002
6. Планирование и диспетчеризация (4)
void TaskA_Entry(void)
{
Activate( TaskB );
}
TaskA вытесняется
MT, v1.4, 2002
6. Планирование и диспетчеризация (5)
Program Counter
Accumulator B
Index Register
CPU status
Compiler
MT, v1.4, 2002
6. Планирование и диспетчеризация (5)
Program Counter
Accumulator B
Index Register
CPU status
Compiler
MT, v1.4, 2002
7. Типы планирования (1)
7.1 Невытесняющее (non pre-emptive) планирование
terminate or
MT, v1.4, 2002
7. Типы планирования (1)
7.1 Невытесняющее (non pre-emptive) планирование
terminate or
MT, v1.4, 2002
7. Типы планирования (2)
7.3 Круговое (Round-Robin) планирование
terminate
TaskA, TaskB, TaskC
MT, v1.4, 2002
7. Типы планирования (2)
7.3 Круговое (Round-Robin) планирование
terminate
TaskA, TaskB, TaskC
MT, v1.4, 2002
7. Типы планирования (3)
7.5 Time-triggered scheduling (X-by-wire)
TaskD
TaskC
TaskB
TaskA
Свойства time-triggered планирования:
1.
MT, v1.4, 2002
7. Типы планирования (3)
7.5 Time-triggered scheduling (X-by-wire)
TaskD
TaskC
TaskB
TaskA
Свойства time-triggered планирования:
1.
MT, v1.4, 2002
8. Управление задачами (1)
Для того, чтобы обработка внутренних событий
MT, v1.4, 2002
8. Управление задачами (1)
Для того, чтобы обработка внутренних событий

MT, v1.4, 2002
8. Управление задачами (2)
Inactive
Terminate (itself)
Activate
Dispatch To
Running
Yield
Dispatch From
Kill (optional)
ROM
RAM
Ready List
Activate
MT, v1.4, 2002
8. Управление задачами (2)
Inactive
Terminate (itself)
Activate
Dispatch To
Running
Yield
Dispatch From
Kill (optional)
ROM
RAM
Ready List
Activate

MT, v1.4, 2002
8. Управление задачами (3)
Link
Entry Point (*f)()
Priority
TaskID
TaskID
TaskID
Link
running
Структуры данных для управления
задачами
MT, v1.4, 2002
8. Управление задачами (3)
Link
Entry Point (*f)()
Priority
TaskID
TaskID
TaskID
Link
running
Структуры данных для управления
задачами
MT, v1.4, 2002
8. Управление задачами (4)
terminate
TaskB
(high)
TaskA
(low)
running
running
inactive
inactive
activate
ready
Tactivation
Ttermination
TaskB
(high)
TaskA
(low)
running
running
yield
Tcontext switch
Pre-emptive scheduling
Non Pre-emptive scheduling
Tactivation
MT, v1.4, 2002
8. Управление задачами (4)
terminate
TaskB
(high)
TaskA
(low)
running
running
inactive
inactive
activate
ready
Tactivation
Ttermination
TaskB
(high)
TaskA
(low)
running
running
yield
Tcontext switch
Pre-emptive scheduling
Non Pre-emptive scheduling
Tactivation
MT, v1.4, 2002
9. Ждущие задачи (1)
Inactive
Terminate itself
Activate
Dispatch To
Running
Dispatch From
Kill
Waiting
WaitFlags (Flags, Time)
SetFlags(Flags)
Waiting
MT, v1.4, 2002
9. Ждущие задачи (1)
Inactive
Terminate itself
Activate
Dispatch To
Running
Dispatch From
Kill
Waiting
WaitFlags (Flags, Time)
SetFlags(Flags)
Waiting
MT, v1.4, 2002
9. Ждущие задачи (2)
Waited Flags
Set Flags
TaskID
TaskID
TaskID
Дополнительные структуры данных для
MT, v1.4, 2002
9. Ждущие задачи (2)
Waited Flags
Set Flags
TaskID
TaskID
TaskID
Дополнительные структуры данных для
MT, v1.4, 2002
10. Обслуживание прерываний (1)
Task2
r2
ISR1
r1
highest
high
Внешнее событие e1
T1 = 5
D1 =
MT, v1.4, 2002
10. Обслуживание прерываний (1)
Task2
r2
ISR1
r1
highest
high
Внешнее событие e1
T1 = 5
D1 =
MT, v1.4, 2002
10. Обслуживание прерываний (2)
Highest priority
Lowest priority
Interrupts’ priority
levels
Планируются аппаратно
Tasks’ priority
levels
Планируются
MT, v1.4, 2002
10. Обслуживание прерываний (2)
Highest priority
Lowest priority
Interrupts’ priority
levels
Планируются аппаратно
Tasks’ priority levels Планируются
MT, v1.4, 2002
10. Обслуживание прерываний (3)
Для того, чтобы обработка внешних и
MT, v1.4, 2002
10. Обслуживание прерываний (3)
Для того, чтобы обработка внешних и
MT, v1.4, 2002
10. Обслуживание прерываний (4)
void interrupt Isr1()
{
ISREntry();
ISRActivate( TaskB );
ISRExit();
“Return
MT, v1.4, 2002
10. Обслуживание прерываний (4)
void interrupt Isr1()
{
ISREntry();
ISRActivate( TaskB );
ISRExit();
“Return
MT, v1.4, 2002
10. Обслуживание прерываний (5)
Task A
(low)
Task B
(high)
ISR
(high)
running
executing
running
interrupted
interrupt
running
Activation
(dispatching)
ready
Activation
(scheduling)
Tinterrupt entry latency
Tinterrupt switch
MT, v1.4, 2002
10. Обслуживание прерываний (5)
Task A
(low)
Task B
(high)
ISR
(high)
running
executing
running
interrupted
interrupt
running
Activation
(dispatching)
ready
Activation
(scheduling)
Tinterrupt entry latency
Tinterrupt switch
MT, v1.4, 2002
10.1 Вложенные прерывания
Task
ISR 2
ISR 1
running
executing
running
interrupted
interrupt
interrupted
executing
executing
interrupt
Вложенные прерывания улучшают возможность системы
MT, v1.4, 2002
10.1 Вложенные прерывания
Task
ISR 2
ISR 1
running
executing
running
interrupted
interrupt
interrupted
executing
executing
interrupt
Вложенные прерывания улучшают возможность системы
MT, v1.4, 2002
10.2 Немедленное выполнение сервиса ОС
Task A
(low)
Task B
(high)
ISR
(med)
running
executing
running
interrupted
interrupt
pre-empted
executing
running
Немедленное выполнение сервиса
MT, v1.4, 2002
10.2 Немедленное выполнение сервиса ОС
Task A
(low)
Task B
(high)
ISR
(med)
running
executing
running
interrupted
interrupt
pre-empted
executing
running
Немедленное выполнение сервиса
MT, v1.4, 2002
10.3 Задержанное выполнение сервисов ОС (1)
Task A
(low)
Task B
(med)
ISR
(high)
running
executing
running
interrupted
interrupt
running
Задержанное выполнение
MT, v1.4, 2002
10.3 Задержанное выполнение сервисов ОС (1)
Task A
(low)
Task B
(med)
ISR
(high)
running
executing
running
interrupted
interrupt
running
Задержанное выполнение
MT, v1.4, 2002
10.3 Задержанное выполнение сервисов ОС (2)
Планирование в случае задержанного
MT, v1.4, 2002
10.3 Задержанное выполнение сервисов ОС (2)
Планирование в случае задержанного
MT, v1.4, 2002
10.4 Отложенное выполнение сервисов ОС
Task A (low)
Task B
(med)
ISR
(high)
running
executing
running
interrupt
running
Отложенное выполнение
MT, v1.4, 2002
10.4 Отложенное выполнение сервисов ОС
Task A (low)
Task B
(med)
ISR
(high)
running
executing
running
interrupt
running
Отложенное выполнение
MT, v1.4, 2002
10.5 Ограничение сервисов ОС
Многие ОС не позволяют выполнять все
MT, v1.4, 2002
10.5 Ограничение сервисов ОС
Многие ОС не позволяют выполнять все
MT, v1.4, 2002
11. Разделяемые ресурсы (семафоры)
void TaskA_Entry(void)
{
/* Entry Critical Section
MT, v1.4, 2002
11. Разделяемые ресурсы (семафоры)
void TaskA_Entry(void)
{
/* Entry Critical Section
MT, v1.4, 2002
11.1 P/V семафоры и проблемы (1)
Task 2
(low)
Task 0
(high)
running
running
running
ready
P(S1)
access to
MT, v1.4, 2002
11.1 P/V семафоры и проблемы (1)
Task 2
(low)
Task 0
(high)
running
running
running
ready
P(S1) access to
MT, v1.4, 2002
11.1 P/V семафоры и проблемы (2)
Полная версия http://www.wrs.com/products/html/jpl.html
Комментарий http://www.embedded.com/2000/0006/0006feat1.htm
Исправление
MT, v1.4, 2002
11.1 P/V семафоры и проблемы (2)
Полная версия http://www.wrs.com/products/html/jpl.html
Комментарий http://www.embedded.com/2000/0006/0006feat1.htm
Исправление
MT, v1.4, 2002
11.1 P/V семафоры и проблемы (3)
Task 2
(low)
Task 0
(high)
Task 1
(med)
running
running
running
running
running
inactive
ready
inactive
ready
P(S1)
access
MT, v1.4, 2002
11.1 P/V семафоры и проблемы (3)
Task 2
(low)
Task 0
(high)
Task 1
(med)
running
running
running
running
running
inactive
ready
inactive
ready
P(S1) access
MT, v1.4, 2002
11.1 P/V семафоры и проблемы (4)
Для того, чтобы семафоры
MT, v1.4, 2002
11.1 P/V семафоры и проблемы (4)
Для того, чтобы семафоры
MT, v1.4, 2002
11.2 Interrupt Masking Protocol (IMP)
Task 1
(low)
Disabled
Interrupts
Task 0
(high)
running
running
running
inactive
ready
enable interrupts
disable interrupts
Task
MT, v1.4, 2002
11.2 Interrupt Masking Protocol (IMP)
Task 1
(low)
Disabled
Interrupts
Task 0
(high)
running
running
running
inactive
ready
enable interrupts
disable interrupts
Task
MT, v1.4, 2002
11.3 Priority Inheritance Protocol (PIP) (1)
Task 1
(low)
Inherited priority
Task 0
(high)
running
running
running
running
inactive
ready
(blocked)
ready
release
MT, v1.4, 2002
11.3 Priority Inheritance Protocol (PIP) (1)
Task 1
(low)
Inherited priority
Task 0
(high)
running
running
running
running
inactive
ready
(blocked)
ready
release
MT, v1.4, 2002
11.3 Priority Inheritance Protocol (2)
Task 1
(low)
Inherited priority
Task 0
(high)
running
running
running
inactive
ready
(blocked)
request resource
MT, v1.4, 2002
11.3 Priority Inheritance Protocol (2)
Task 1
(low)
Inherited priority
Task 0
(high)
running
running
running
inactive
ready
(blocked)
request resource
MT, v1.4, 2002
11.4 Highest Locker Protocol (HLP) (1)
Task 2
(low)
Ceiling priority
(med)
Task 1
(med)
inactive
inactive
running
running
running
running
running
running
running
running
inactive
ready
(blocked)
inactive
ready
release
MT, v1.4, 2002
11.4 Highest Locker Protocol (HLP) (1)
Task 2
(low)
Ceiling priority
(med)
Task 1
(med)
inactive
inactive
running
running
running
running
running
running
running
running
inactive
ready
(blocked)
inactive
ready
release
MT, v1.4, 2002
11.4 Highest Locker Protocol (2)
Task 2
(low)
Ceiling priority
(low)
Task 1
(low)
running
running
running
running
running
inactive
ready
inactive
ready
request resource
MT, v1.4, 2002
11.4 Highest Locker Protocol (2)
Task 2
(low)
Ceiling priority
(low)
Task 1
(low)
running
running
running
running
running
inactive
ready
inactive
ready
request resource
MT, v1.4, 2002
12. Техника назначения приоритетов
Задачи применения техники назначения приоритетов:
1. Обеспечить
MT, v1.4, 2002
12. Техника назначения приоритетов
Задачи применения техники назначения приоритетов:
1. Обеспечить
MT, v1.4, 2002
12.1 Rate Monotonic Algorithm (1)
Rate Monotonic Scheduling (RMS)
MT, v1.4, 2002
12.1 Rate Monotonic Algorithm (1)
Rate Monotonic Scheduling (RMS)
MT, v1.4, 2002
12.1 Rate Monotonic Algorithm (2)
C1
—— +
T1
C2
—— +
T2
MT, v1.4, 2002
12.1 Rate Monotonic Algorithm (2)
C1
—— +
T1
C2
—— +
T2
MT, v1.4, 2002
12.2 Earliest Deadline First
Earliest Deadline First оптимален для
MT, v1.4, 2002
12.2 Earliest Deadline First
Earliest Deadline First оптимален для
MT, v1.4, 2002
13. Preemptive Threshold Scheduling
t2
t1
t0
t2
t1
t0
PT1,2
…
…
…
…
PTS для группы t1 и t2:
MT, v1.4, 2002
13. Preemptive Threshold Scheduling
t2
t1
t0
t2
t1
t0
PT1,2
…
…
…
…
PTS для группы t1 и t2:

MT, v1.4, 2002
14. Сетевая передача данных (1)
Volvo S80 имеет две сети
MT, v1.4, 2002
14. Сетевая передача данных (1)
Volvo S80 имеет две сети
MT, v1.4, 2002
14. Сетевая передача данных (2)
7. Application
6. Presentation
5. Session
4. Transport
3.
MT, v1.4, 2002
14. Сетевая передача данных (2)
7. Application
6. Presentation
5. Session
4. Transport
3.
MT, v1.4, 2002
14.1 Физический уровень и уровень доступа на примере CAN
MT, v1.4, 2002
14.1 Физический уровень и уровень доступа на примере CAN
MT, v1.4, 2002
14.1 Физический уровень и уровень доступа на примере CAN
MT, v1.4, 2002
14.1 Физический уровень и уровень доступа на примере CAN
MT, v1.4, 2002
14.1 Физический уровень и уровень доступа на примере CAN
MT, v1.4, 2002
14.1 Физический уровень и уровень доступа на примере CAN
MT, v1.4, 2002
14.2 Управление сетью
Управление сетью (Network Management) предназначено для отслеживания
MT, v1.4, 2002
14.2 Управление сетью
Управление сетью (Network Management) предназначено для отслеживания
MT, v1.4, 2002
15. Примеры Операционных Систем (1)
Код
приложения
(source code)
[*.c]
Конфигурация
приложения
Характеристики
задач, ресурсов,
сообщений
(текстовый
MT, v1.4, 2002
15. Примеры Операционных Систем (1)
Код
приложения
(source code)
[*.c]
Конфигурация
приложения
Характеристики
задач, ресурсов,
сообщений
(текстовый
MT, v1.4, 2002
15. Примеры Операционных Систем (2)
OSEK/VDX
Спецификации встроенной операционной системы реального
MT, v1.4, 2002
15. Примеры Операционных Систем (2)
OSEK/VDX
Спецификации встроенной операционной системы реального
MT, v1.4, 2002
15.1 OSEK/VDX (1)
OSEK = “Offene Systeme und deren Schnittstellen
MT, v1.4, 2002
15.1 OSEK/VDX (1)
OSEK = “Offene Systeme und deren Schnittstellen
MT, v1.4, 2002
15.1 OSEK/VDX (2)
Функциональные свойства Операционной Системы OSEK/VDX OS
Планирование
MT, v1.4, 2002
15.1 OSEK/VDX (2)
Функциональные свойства Операционной Системы OSEK/VDX OS
Планирование
MT, v1.4, 2002
15.1 OSEK/VDX (3)
Схема совместимости классов
соответствия
Basic
Conformance
Class 1
Basic
Conformance
Class 2
Extended
Conformance
Class 1
Extended
Conformance
Class 2
1
MT, v1.4, 2002
15.1 OSEK/VDX (3)
Схема совместимости классов
соответствия
Basic
Conformance
Class 1
Basic
Conformance
Class 2
Extended
Conformance
Class 1
Extended
Conformance
Class 2
1
MT, v1.4, 2002
15.1 OSEK/VDX (4)
Counter
Value
Alarm 1
Limit
TaskA
Alarm 2
Limit
TaskB
Event1
TASK( TaskA )
{
TerminateTask();
}
ActivateTask
TASK( TaskB )
{
MT, v1.4, 2002
15.1 OSEK/VDX (4)
Counter
Value
Alarm 1
Limit
TaskA
Alarm 2
Limit
TaskB
Event1
TASK( TaskA )
{
TerminateTask();
}
ActivateTask
TASK( TaskB )
{
MT, v1.4, 2002
15.1 OSEK/VDX (5)
Сообщения могут передаваться между задачами в одном
MT, v1.4, 2002
15.1 OSEK/VDX (5)
Сообщения могут передаваться между задачами в одном
MT, v1.4, 2002
15.2 Real-Time Linux (1)
Hardware
Real-Time
Kernel
real time task
real time task
“Conventional”
MT, v1.4, 2002
15.2 Real-Time Linux (1)
Hardware
Real-Time
Kernel
real time task
real time task
“Conventional”
 Microsoft Access бойынша жалпы мәлімет
Microsoft Access бойынша жалпы мәлімет Алгоритм сортировки кучей (Heap Sort)
Алгоритм сортировки кучей (Heap Sort) Интерфейс Windows API
Интерфейс Windows API Виды информационных технологий и систем
Виды информационных технологий и систем Глобальное информационное общество и его модели
Глобальное информационное общество и его модели Урок в 5 классе Метод координат
Урок в 5 классе Метод координат Средства информационных и коммуникационных технологий как инструмент оценивания образовательных результатов
Средства информационных и коммуникационных технологий как инструмент оценивания образовательных результатов Алгоритмические приёмы работы с символами и строками
Алгоритмические приёмы работы с символами и строками Проектировка и разработка игры в жанре RPG
Проектировка и разработка игры в жанре RPG Организация специального технического обеспечения действий и применения ГИК. Лекция №08
Организация специального технического обеспечения действий и применения ГИК. Лекция №08 Безопасный Интернет
Безопасный Интернет Применение простых чисел в криптографии с открытым ключом
Применение простых чисел в криптографии с открытым ключом RAM, ROM and Virtual memory
RAM, ROM and Virtual memory Система объектов
Система объектов Алгоритмы и модели трассировки проводных соединений в ЭА. Лекция 4
Алгоритмы и модели трассировки проводных соединений в ЭА. Лекция 4 Cuda “Нello, world”. (Лабораторная работа 1)
Cuda “Нello, world”. (Лабораторная работа 1) Слуга народу. Логобук
Слуга народу. Логобук Классификация компьютеров по функциональным возможностям
Классификация компьютеров по функциональным возможностям Языки программирования
Языки программирования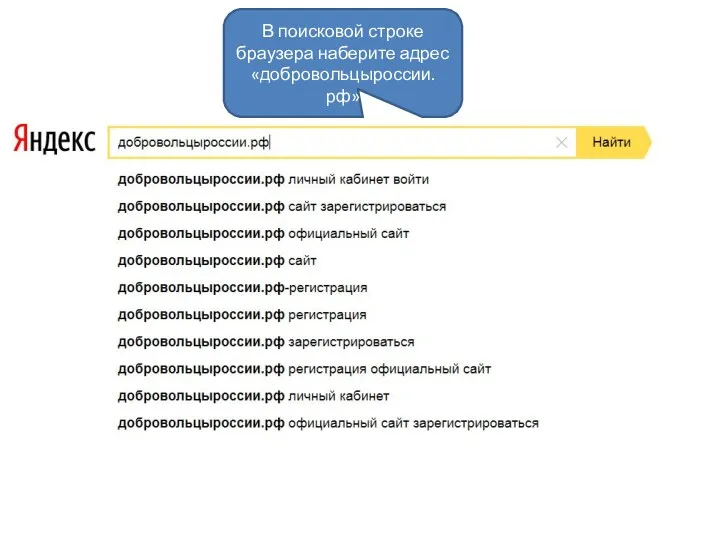 Добровольцы России. Регистрация добровольца
Добровольцы России. Регистрация добровольца Работа с базами данных. Технология ADO.NET
Работа с базами данных. Технология ADO.NET Основные направления и этапы развития информационных систем
Основные направления и этапы развития информационных систем Язык Python в школьном курсе информатики
Язык Python в школьном курсе информатики Бизнес в глобальной инфокоммуникационной среде
Бизнес в глобальной инфокоммуникационной среде Вред и польза компьютерных игр
Вред и польза компьютерных игр Создание гипертекстового документа
Создание гипертекстового документа Презентация Компьютерные вирусы
Презентация Компьютерные вирусы Цифровые образовательные ресурсы как средство повышения эффективности обучения на уроках информатики.
Цифровые образовательные ресурсы как средство повышения эффективности обучения на уроках информатики.