- Описание и принцип действия нечетких систем управления

Содержание
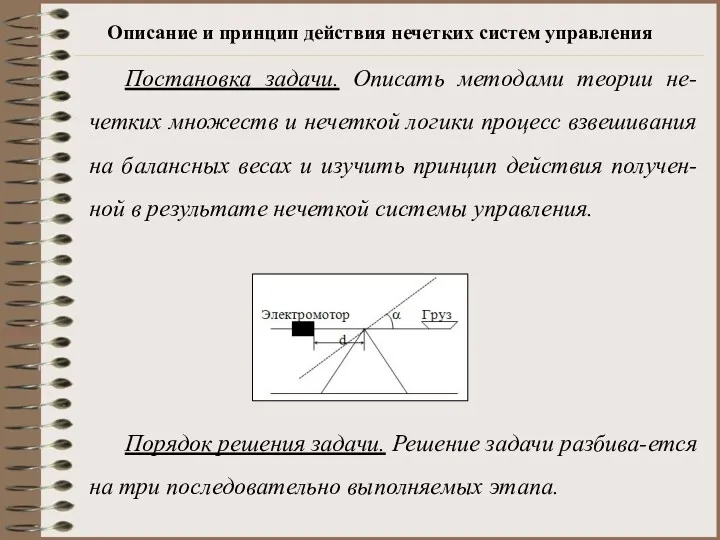
- 2. Описание и принцип действия нечетких систем управления Постановка задачи. Описать методами теории не-четких множеств и нечеткой
- 3. Описание и принцип действия нечетких систем управления Описание контролируемых и управляющих координат заданного процесса и манипулирование
- 4. Описание и принцип действия нечетких систем управления Формирование термов лингвистических переменных Для лингвистической переменной «angle» целесообразно
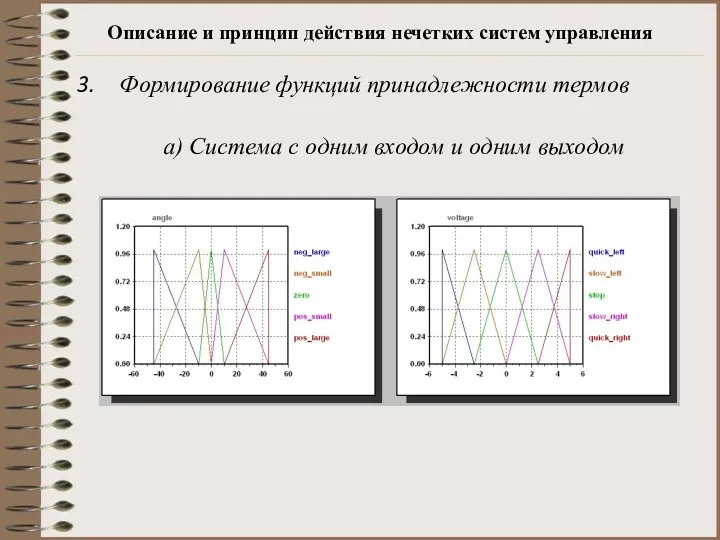
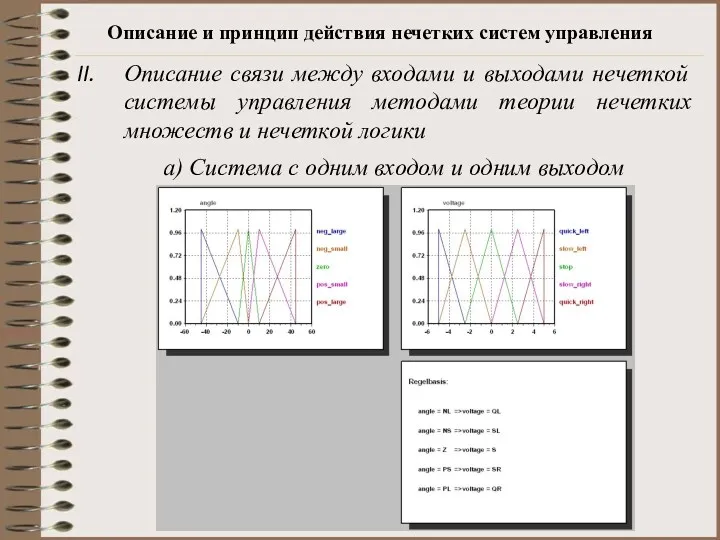
- 5. Описание и принцип действия нечетких систем управления Формирование функций принадлежности термов а) Система с одним входом
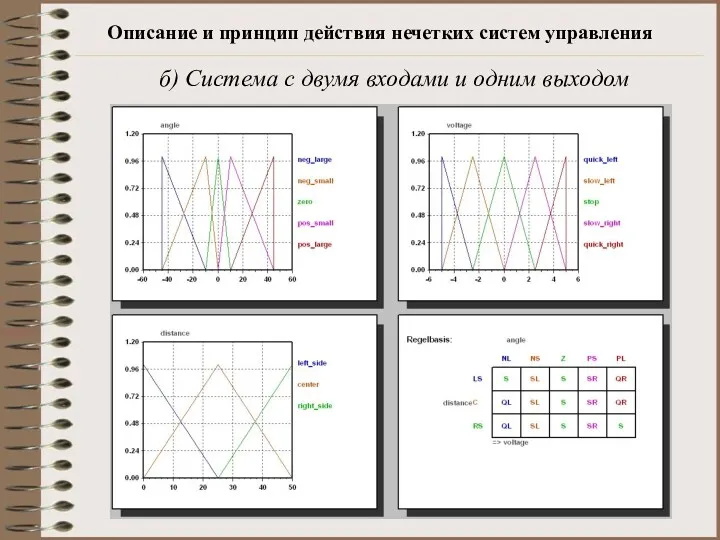
- 6. Описание и принцип действия нечетких систем управления б) Система с двумя входами и одним выходом
- 7. Описание и принцип действия нечетких систем управления Описание связи между входами и выходами нечеткой системы управления
- 8. Описание и принцип действия нечетких систем управления б) Система с двумя входами и одним выходом
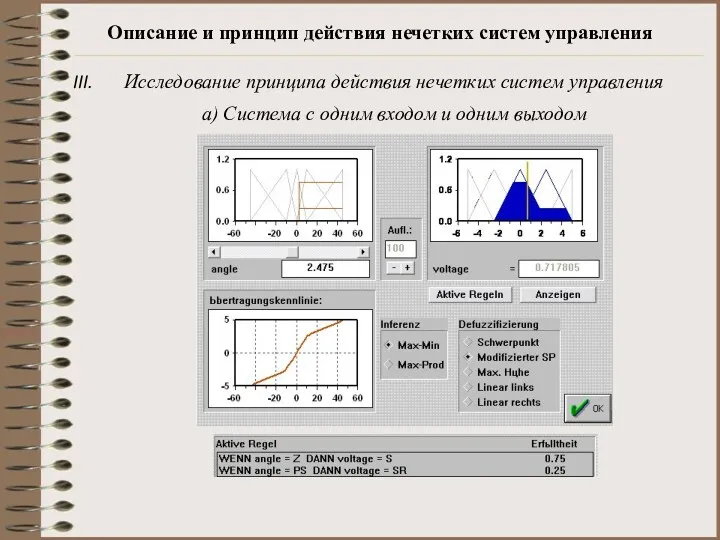
- 9. Описание и принцип действия нечетких систем управления Исследование принципа действия нечетких систем управления а) Система с
- 11. Скачать презентацию
Описание и принцип действия нечетких систем управления
Постановка задачи. Описать методами теории
Описание и принцип действия нечетких систем управления
Постановка задачи. Описать методами теории
Описание и принцип действия нечетких систем управления
Описание контролируемых и управляющих координат
Описание и принцип действия нечетких систем управления
Описание контролируемых и управляющих координат
Описание и принцип действия нечетких систем управления
Формирование термов лингвистических переменных
Для лингвистической
Описание и принцип действия нечетких систем управления
Формирование термов лингвистических переменных
Для лингвистической
Описание и принцип действия нечетких систем управления
Формирование функций принадлежности термов
а) Система
Описание и принцип действия нечетких систем управления
Формирование функций принадлежности термов
а) Система

Описание и принцип действия нечетких систем управления
б) Система с двумя входами
Описание и принцип действия нечетких систем управления
б) Система с двумя входами
Описание и принцип действия нечетких систем управления
Описание связи между входами и
Описание и принцип действия нечетких систем управления
Описание связи между входами и
Описание и принцип действия нечетких систем управления
б) Система с двумя входами
Описание и принцип действия нечетких систем управления
б) Система с двумя входами
Описание и принцип действия нечетких систем управления
Исследование принципа действия нечетких систем
Описание и принцип действия нечетких систем управления
Исследование принципа действия нечетких систем
 Өтілген материалдарды қайталау
Өтілген материалдарды қайталау Квест это просто игра, или…
Квест это просто игра, или… Модели семантических сетей
Модели семантических сетей Архиваторы
Архиваторы Программное обеспечение. Правовая охрана программ и данных
Программное обеспечение. Правовая охрана программ и данных Квантовые компьютеры
Квантовые компьютеры Golang
Golang Локальные компьютерные сети
Локальные компьютерные сети Корректировки по сайту
Корректировки по сайту Операторы в языке Си. (Лекция 5)
Операторы в языке Си. (Лекция 5) Лекции 9 – 10. Операторы управления
Лекции 9 – 10. Операторы управления Алгоритмы и их исполнители. 6 класс
Алгоритмы и их исполнители. 6 класс Масиви та рядки. Алгоритми сортування масивів даних
Масиви та рядки. Алгоритми сортування масивів даних Алгоритм. 6 класс
Алгоритм. 6 класс Технические средства компьютерной графики. Системы координат. Форматы хранения графической информации. (Лекция 2)
Технические средства компьютерной графики. Системы координат. Форматы хранения графической информации. (Лекция 2) Введение в СУБД ORACLE. Лекция 1
Введение в СУБД ORACLE. Лекция 1 CAD SmartSketch. Biesse icons defining machining technologies
CAD SmartSketch. Biesse icons defining machining technologies Технология машиностроения
Технология машиностроения Физкультминутка на уроках
Физкультминутка на уроках Презентация по теме Файловая технология организации данных в современных ПК
Презентация по теме Файловая технология организации данных в современных ПК Анализ интернет-издания Палач
Анализ интернет-издания Палач Локальные компьютерные сети
Локальные компьютерные сети Школа::Кода Основы программирования на языке Python. 14 занятие
Школа::Кода Основы программирования на языке Python. 14 занятие Дистанционное обучение
Дистанционное обучение Исследование технологий обеспечения эффективной работы компьютерного оборудования учреждений
Исследование технологий обеспечения эффективной работы компьютерного оборудования учреждений Текстовые документы и технологии их создания
Текстовые документы и технологии их создания Объектно-ориентированное программирование
Объектно-ориентированное программирование Архитектура компьютера
Архитектура компьютера