- Решение задач общего машиностроения в программном комплексе

Содержание
- 2. Обратите внимание Все анимации, иллюстрации, результаты моделирования, приведенные в данной презентации, выполнены с использованием моделей и
- 3. Содержание Примеры моделирования Механическая система как объект моделирования Создание моделей Анализ динамики моделей Верификация программного комплекса
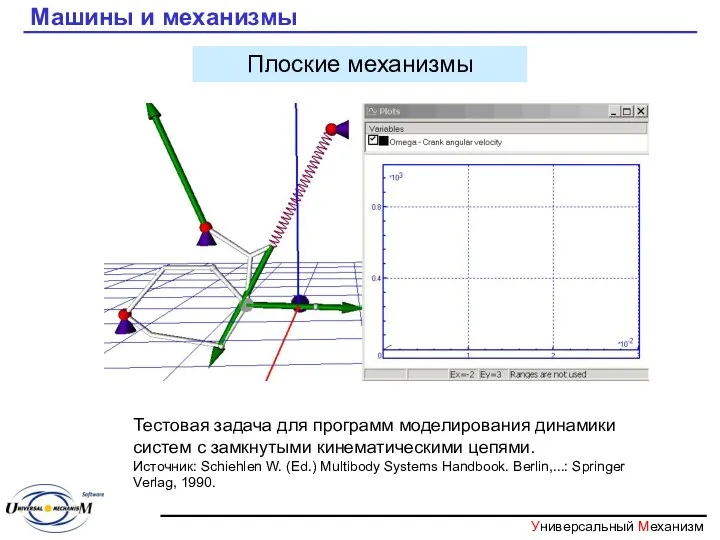
- 4. Машины и механизмы Плоские механизмы Тестовая задача для программ моделирования динамики систем с замкнутыми кинематическими цепями.
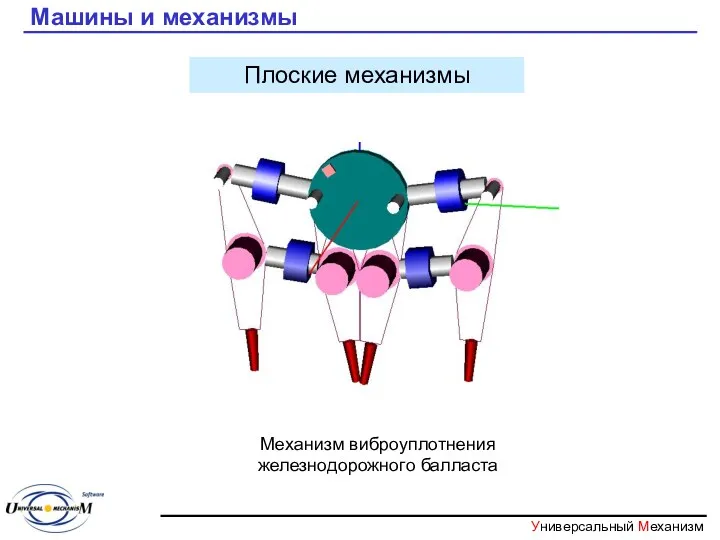
- 5. Машины и механизмы Плоские механизмы Механизм виброуплотнения железнодорожного балласта
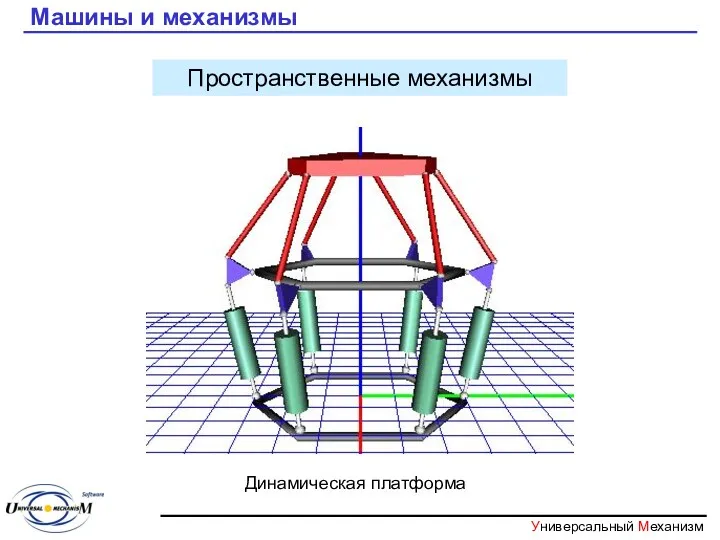
- 6. Машины и механизмы Пространственные механизмы Динамическая платформа
- 7. Машины и механизмы Самораспаковывающаяся космическая ферма Пространственные механизмы
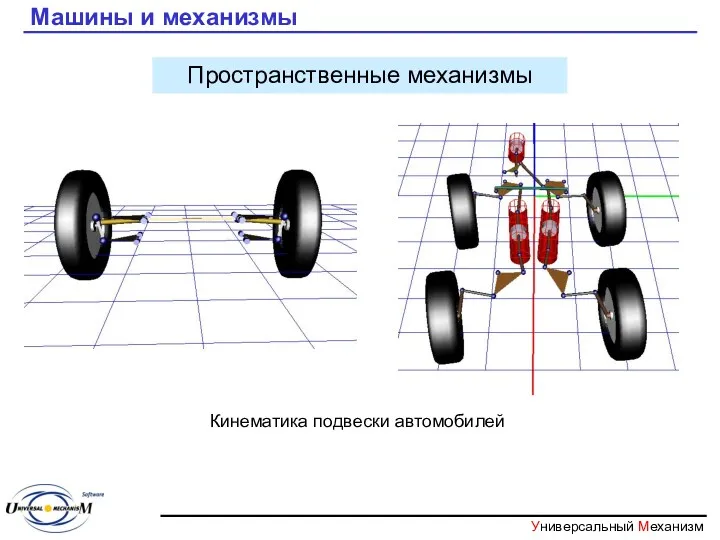
- 8. Машины и механизмы Кинематика подвески автомобилей Пространственные механизмы
- 9. Пуск ракеты ЦКБ «Новатор», Екатеринбург
- 10. Плавучая нефтяная платформа Моделирование динамики плавучей нефтяной платформы с учетом гидродинамических сил Автор: Dr.-Ing. U. Wilke
- 11. Двигатель
- 12. Динамика автомобиля УАЗ на ухабе
- 13. Элементы трансмиссии автомобиля Дифференциал Карданный вал
- 14. Грейдер ГС 18-05 Грейдер ГС 18-05 производства ОАО «Брянский арсенал». Скорость движения: 40 км/ч Покрытие: асфальт
- 15. ВАЗ 2109 Тест «вертикальная прокачка»
- 16. Моделирование гусеничных экипажей Результаты моделирования
- 17. Моделирование гусеничных экипажей Результаты моделирования
- 18. Взаимодействие гусеницы и звездочки
- 19. Грузовик с прицепом Смена полосы движения, V=88 км/ч
- 20. Автопоезд Поворот на 90º, V=10 км/ч, радиус дуги 11,25 м
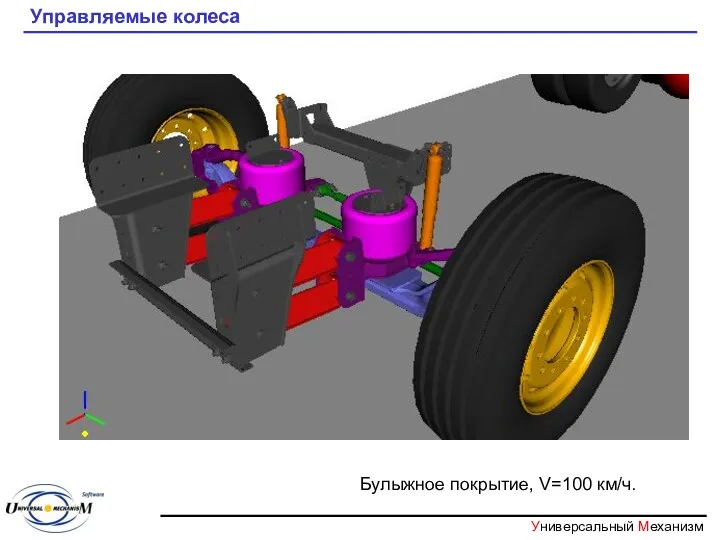
- 21. Управляемые колеса Булыжное покрытие, V=100 км/ч.
- 22. Грохот для ЭЗТМ Электростальский завод тяжелого машиностроения Макет грохота Модель макета грохота. Трехмерная модель в КОМПАС-3D
- 23. НИИ Автоматической Аппаратуры Кинематическое возбуждение из эксперимента Запатентованная тросовая система виброзащиты, НИИ Автоматической Аппаратуры, Москва, 2007
- 24. Моделирование Разработчик: к.ф.-м.н. Селенский Е.Е. Манипулятор «Рука»
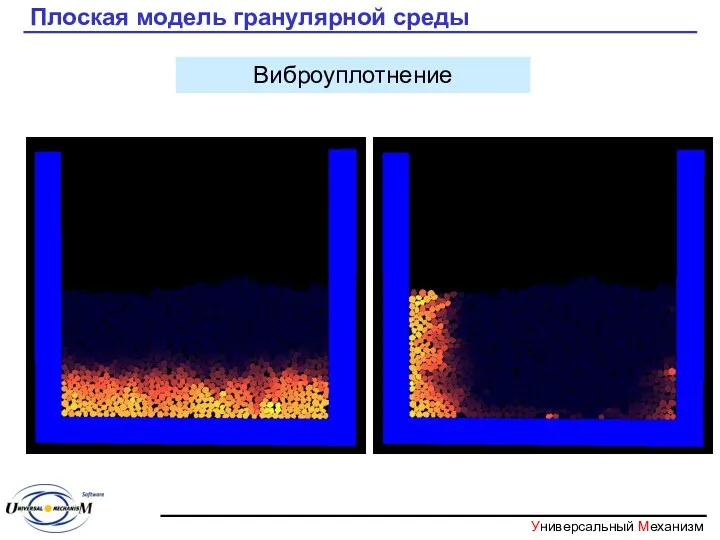
- 25. Плоская модель гранулярной среды Моделирование гранулярной среды включает: создание частиц с учетом статистики; заполнение заданного объема;
- 26. Плоская модель гранулярной среды Виброуплотнение
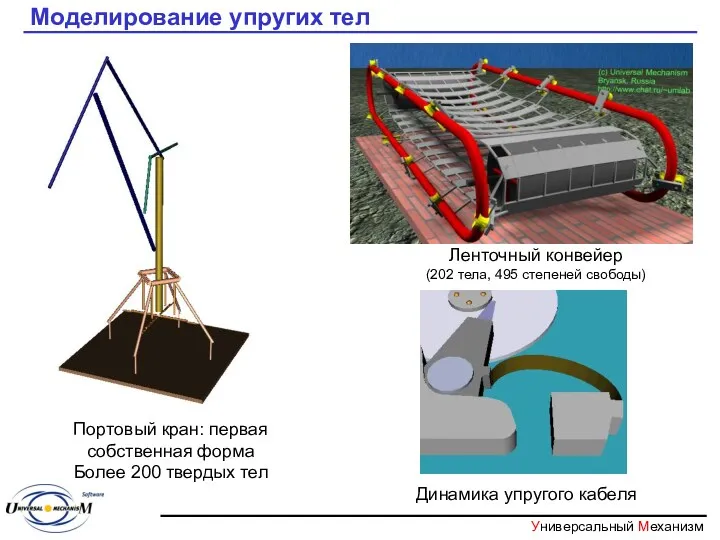
- 27. Моделирование упругих тел Портовый кран: первая собственная форма Более 200 твердых тел Ленточный конвейер (202 тела,
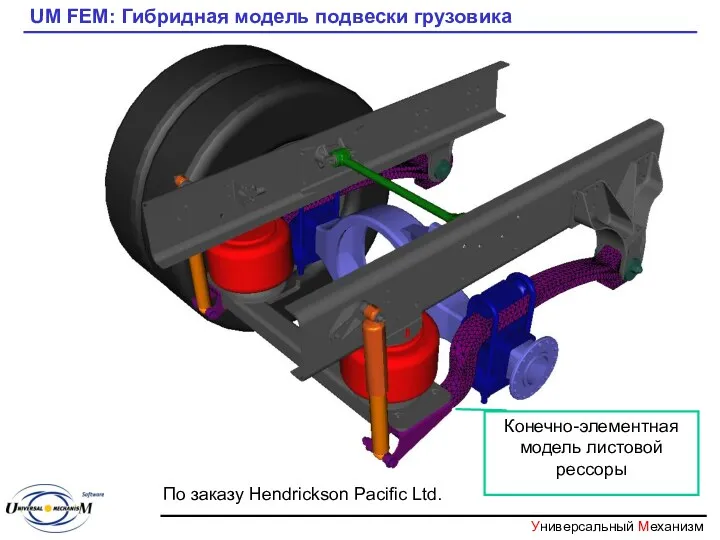
- 28. UM FEM: Гибридная модель подвески грузовика По заказу Hendrickson Pacific Ltd. Конечно-элементная модель листовой рессоры
- 29. UM FEM: принцип работы Моделирование гибридных систем (систем твёрдых и упругих тел) Импорт динамических и статических
- 30. UM FEM Моделирование гибридных систем Импорт динамических и статических форм из МКЭ-программ (ANSYS, MSC.NASTRAN)
- 31. Содержание Примеры моделирования Механическая система как объект моделирования Создание моделей Анализ динамики моделей Верификация программного комплекса
- 32. Порядок создания и исследования модели Исходная механическая система Формирование исходных данных и концепции модели Формирование кинематической
- 33. Механическая система как объект моделирования Тела + Шарниры + Силовые элементы
- 34. Твердые тела Твердые тела: Графический образ Инерционные параметры
- 35. Шарниры Поступательный Вращательный 2 - 6 степеней свободы Кватернионный Стержень Шарниры
- 36. Силовые элементы По заказу Hendrickson Pacific Ltd. Демпфер Пневмопружина Сайлент-блок Сайлент-блок
- 37. Cиловые элементы Пневмопружины Демферы
- 38. Силовые элементы Линейный силовой элемент: пружины Биполярный силовой элемент: демпферы, тяги и т.д.
- 39. Контактные силы Контактные силы: точка – плоскость, точка – Z-поверхность Система фрикционного гашения трехэлементной тележки моделируется
- 40. Контактные силы Контактные силы: Окружность – Плоскость, Окружность – Z-поверхность, Окружность – Цилиндр Корпус подшипника под
- 41. Специальные силы Специальные контактные силы: кулачки Доступные типы кулачков
- 42. Интерфейс «Компас 3D – Универсальный механизм»
- 43. Интерфейс «Компас 3D – Универсальный механизм» Лобзик Динамическая библиотека для САПР КОМПАС «Универсальный Механизм - Express»
- 44. Интерфейс «SolidWorks – Универсальный механизм»
- 45. Интерфейс «Autodesk Inventor – Универсальный механизм»
- 46. Импорт систем управления из Мatlab/Simulink Пример 1. Стабилизация перевернутого маятника Задача: управляя силой F стабилизировать перевернутый
- 47. Интерфейс с Matlab/Simulink Неуправляемое движение Управляемое движение Пример 1. Результаты моделирования
- 48. Интерфейс с Matlab/Simulink Пример 2. Тяговый привод маневрового локомотива Локомотив ТЭМ21 Тележка Двигатель постоянного тока
- 49. Интерфейс с Matlab/Simulink Пример 3. Электропривод конвейера Плоская модель конвейера. Модель асинхронного двигателя импортирована из Matlab/Simulink.
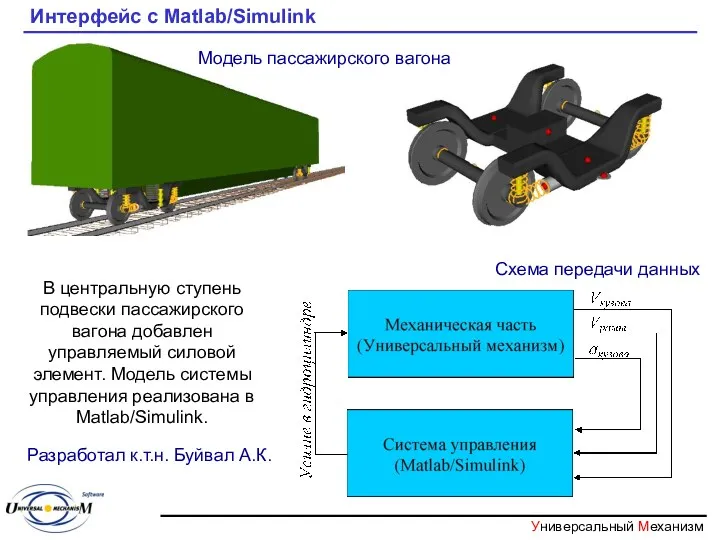
- 50. Интерфейс с Matlab/Simulink В центральную ступень подвески пассажирского вагона добавлен управляемый силовой элемент. Модель системы управления
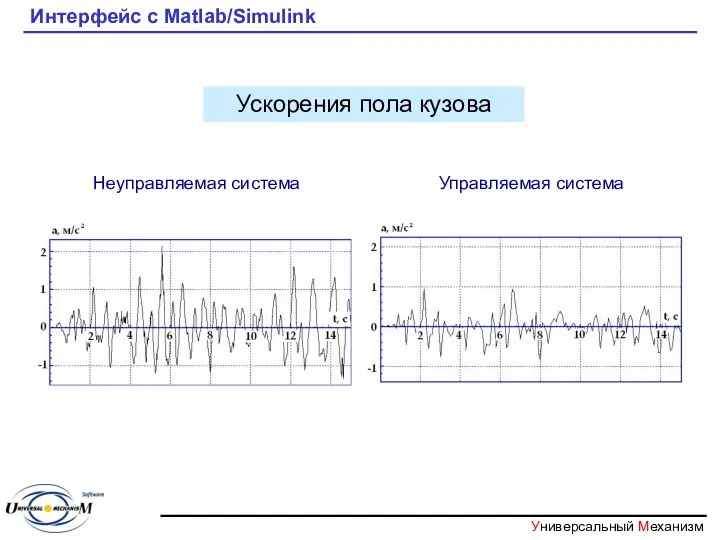
- 51. Интерфейс с Matlab/Simulink Ускорения пола кузова Неуправляемая система Управляемая система
- 52. Содержание Примеры моделирования Механическая система как объект моделирования Создание моделей Анализ динамики моделей Верификация программного комплекса
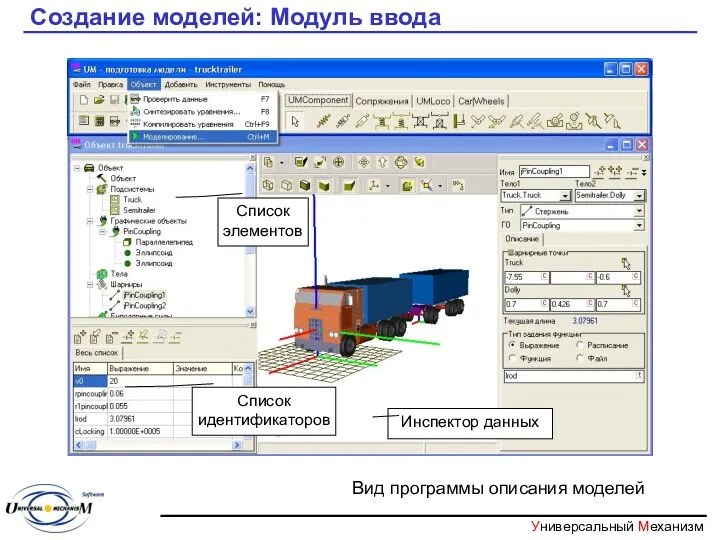
- 53. Создание моделей: Модуль ввода Вид программы описания моделей Список элементов Список идентификаторов Инспектор данных
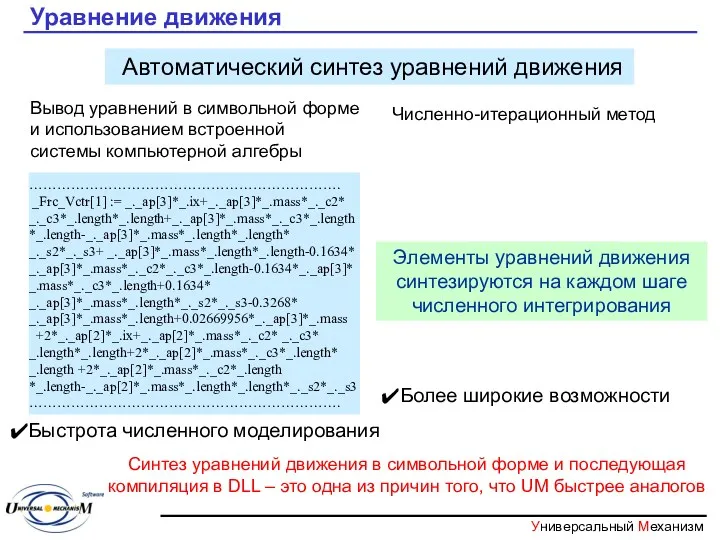
- 54. Уравнение движения Вывод уравнений в символьной форме и использованием встроенной системы компьютерной алгебры Численно-итерационный метод Быстрота
- 55. Содержание Примеры моделирования Механическая система как объект моделирования Создание моделей Анализ динамики моделей Верификация программного комплекса
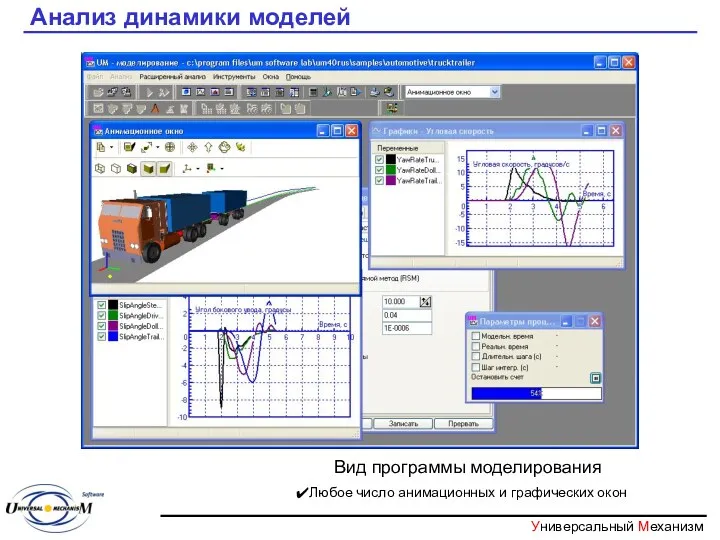
- 56. Анализ динамики моделей Вид программы моделирования Любое число анимационных и графических окон
- 57. Моделирование Двигатель: прямая задача динамики Непосредственное представление результатов 3D анимация движения системы; 3D анимация векторов (силы,
- 58. Моделирование Анимация движения и траекторий Решение прямой и обратной задачи кинематики
- 59. Инструменты моделирования Анализ переменных (динамических показателей) Каждая переменная может быть обработана с помощью Табличного процессора Статистического
- 60. Инструменты моделирования Исходный Отфильтрованный
- 61. Положение равновесия Положение равновесия кабеля в зависимости от положения головки Динамика жесткого диска Силы, действующие на
- 62. Линейный анализ Формы свободных колебаний
- 63. Собственные формы и частоты колебаний 0,40 Гц 1,10 Гц 0,82 Гц 1,39 Гц
- 64. Расчет собственных частот и форм Собственная форма колебаний платформы с частотой 3,57 Гц Собственная форма колебаний
- 65. UM Оптимизация Сканирование Оптимизация Аппроксимация Для расширенного анализа динамики механической системы и оптимизации ее параметров доступны
- 66. Служба распределенных вычислений Программный комплекс «Универсальный механизм» + модуль оптимизации + служба распределенных вычислений Выполнение больших
- 67. Модуль расчета усталостной долговечности Схема работы модуля
- 68. Долговечность: анализ эксплуатационной нагруженности Выделение частных режимов эксплуатации Создание моделей и проведение численных экспериментов (средствами UM
- 69. Результаты расчета долговечности: рама тележки локомотива Рама тележки локомотива, VOSSLOH, Испания Накопленные усталостные повреждения
- 70. Результаты расчета долговечности: рама платформы Распределение максимальных динамических напряжений, МПа Распределение максимальных амплитуд динамических напряжений, МПа
- 71. Долговечность: сравнение с экспериментом Распределение максимальных амплитуд Приведенные эквивалентные амплитуды Картина разрушения Результаты расчета Рама контейнеровоза:
- 72. Автомобильный модуль Движение по булыжному покрытию, V=100 км/ч.
- 73. Автомобильный модуль: модели шин, библиотека подвесок Модели шин Магическая формула Пасейки Модель Fiala Табличные и эксперименталь-ные
- 74. Автомобильный модуль: маневры Маневры с замкнутым контуром системы управления Траектория движения + Модель водителя (модель МакАдама,
- 75. Железнодорожный модуль Модуль моделирования железнодорожных экипажей: более 30 моделей Пассажирский вагон Цистерна Трамвай Вагон метро Электровоз
- 76. Железнодорожные экипажи: база моделей локомотивов России В 2006 г. совместно с ВНИКТИ МПС разработаны 17 моделей
- 77. Модель грузового вагона Трехэлементная тележка (18-100, 18-578 и др.) Контактные точки на пятнике Модель грузового вагона
- 78. Соударение вагонов Моделирование динамики ж.-д. вагонов
- 79. Содержание Примеры моделирования Механическая система как объект моделирования Создание моделей Анализ динамики моделей Верификация программного комплекса
- 80. Грузовые автомобили Национальная комиссия по автомобильному транспорту Австралии Модель 1: Грузовик с прицепом Модель2: Автопоезд ADAMS
- 81. Результаты моделирования: рывок руля Угол бокового увода, град. ADAMS Yaw/Roll AUTOSIM UM
- 82. Результаты моделирования: рывок руля Поперечные силы в шинах, Н ADAMS Yaw/Roll AUTOSIM UM
- 83. Железнодорожные экипажи: Манчестерские тесты Манчестерский тест – Экипаж 1: Пассажирский вагон Манчестерский тест – Экипаж 2:
- 84. Манчестерские тесты: сравнение результатов Экипаж 1, Путь 1 Поперечное смещение колесных пар 1, 2 ADAMS/Rail UM
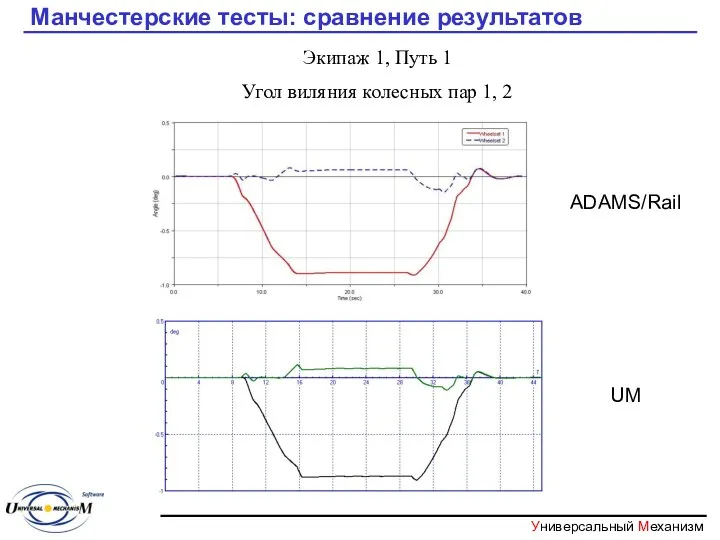
- 85. Манчестерские тесты: сравнение результатов Экипаж 1, Путь 1 Угол виляния колесных пар 1, 2 ADAMS/Rail UM
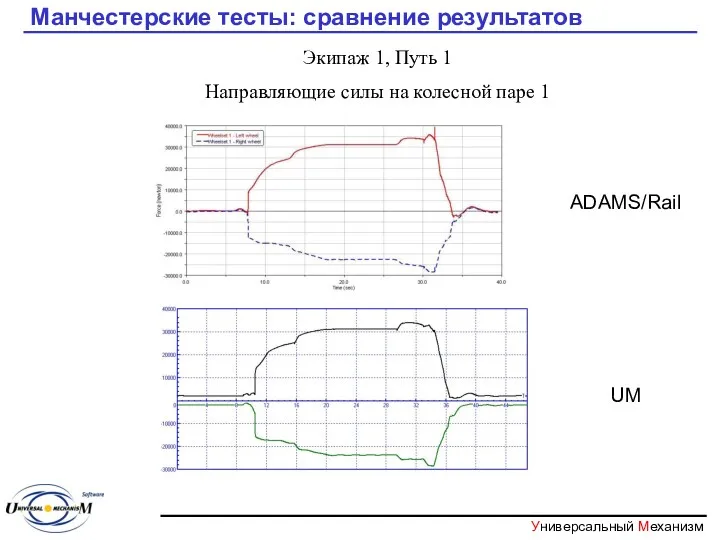
- 86. Манчестерские тесты: сравнение результатов Экипаж 1, Путь 1 Направляющие силы на колесной паре 1 ADAMS/Rail UM
- 87. Сравнение с экспериментами В работах В.И. Сакало и В.С. Коссова рассматривается динамика локомотива ТЭ116 и отмечается,
- 89. Скачать презентацию
Обратите внимание
Все анимации, иллюстрации, результаты моделирования, приведенные в данной презентации, выполнены
Обратите внимание
Все анимации, иллюстрации, результаты моделирования, приведенные в данной презентации, выполнены
Содержание
Примеры моделирования
Механическая система как объект моделирования
Создание моделей
Анализ динамики
Содержание
Примеры моделирования
Механическая система как объект моделирования
Создание моделей
Анализ динамики
Машины и механизмы
Плоские механизмы
Тестовая задача для программ моделирования динамики систем с
Машины и механизмы
Плоские механизмы
Тестовая задача для программ моделирования динамики систем с
Машины и механизмы
Плоские механизмы
Механизм виброуплотнения железнодорожного балласта
Машины и механизмы
Плоские механизмы
Механизм виброуплотнения железнодорожного балласта
Машины и механизмы
Пространственные механизмы
Динамическая платформа
Машины и механизмы
Пространственные механизмы
Динамическая платформа
Машины и механизмы
Самораспаковывающаяся космическая ферма
Пространственные механизмы
Машины и механизмы
Самораспаковывающаяся космическая ферма
Пространственные механизмы
Машины и механизмы
Кинематика подвески автомобилей
Пространственные механизмы
Машины и механизмы
Кинематика подвески автомобилей
Пространственные механизмы
Пуск ракеты
ЦКБ «Новатор», Екатеринбург
Пуск ракеты
ЦКБ «Новатор», Екатеринбург

Плавучая нефтяная платформа
Моделирование динамики плавучей нефтяной платформы с учетом гидродинамических сил
Автор:
Плавучая нефтяная платформа
Моделирование динамики плавучей нефтяной платформы с учетом гидродинамических сил Автор:
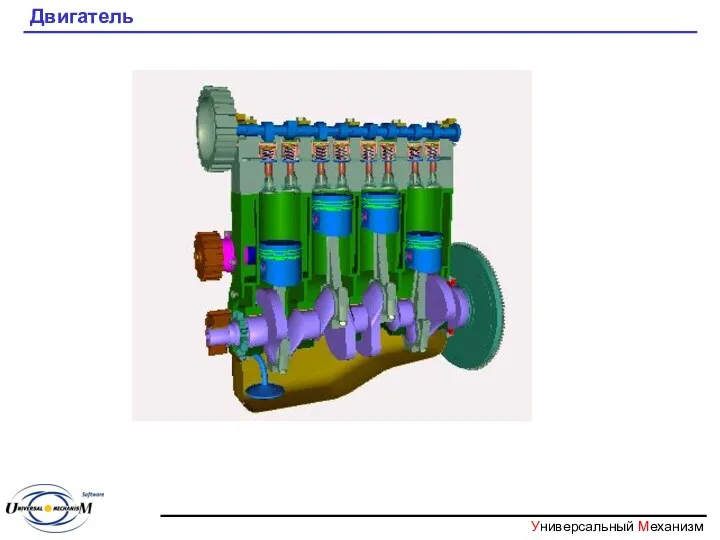
Двигатель
Двигатель

Динамика автомобиля УАЗ на ухабе
Динамика автомобиля УАЗ на ухабе
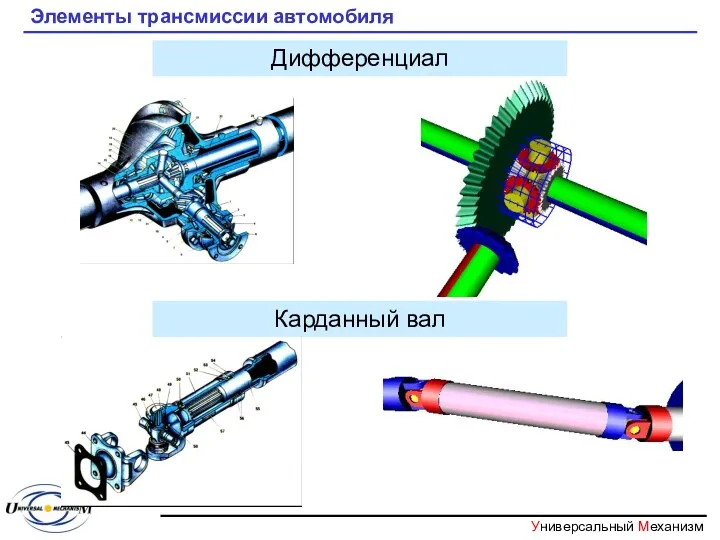
Элементы трансмиссии автомобиля
Дифференциал
Карданный вал
Элементы трансмиссии автомобиля
Дифференциал
Карданный вал

Грейдер ГС 18-05
Грейдер ГС 18-05 производства ОАО «Брянский арсенал».
Скорость движения: 40
Грейдер ГС 18-05
Грейдер ГС 18-05 производства ОАО «Брянский арсенал».
Скорость движения: 40
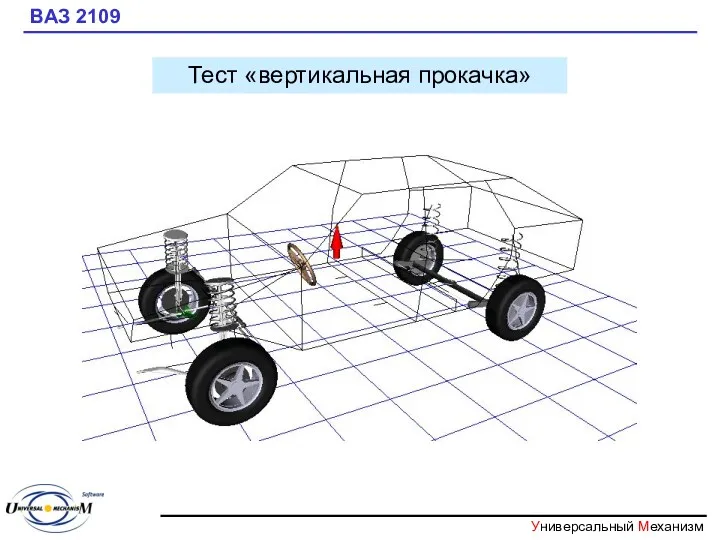
ВАЗ 2109
Тест «вертикальная прокачка»
ВАЗ 2109
Тест «вертикальная прокачка»

Моделирование гусеничных экипажей
Результаты моделирования
Моделирование гусеничных экипажей
Результаты моделирования

Моделирование гусеничных экипажей
Результаты моделирования
Моделирование гусеничных экипажей
Результаты моделирования
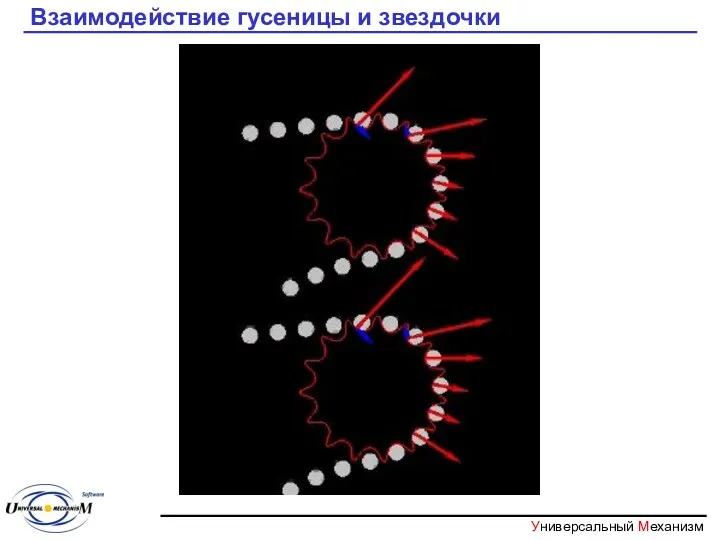
Взаимодействие гусеницы и звездочки
Взаимодействие гусеницы и звездочки

Грузовик с прицепом
Смена полосы движения, V=88 км/ч
Грузовик с прицепом
Смена полосы движения, V=88 км/ч
Автопоезд
Поворот на 90º, V=10 км/ч, радиус дуги 11,25 м
Автопоезд
Поворот на 90º, V=10 км/ч, радиус дуги 11,25 м
Управляемые колеса
Булыжное покрытие, V=100 км/ч.
Управляемые колеса
Булыжное покрытие, V=100 км/ч.

Грохот для ЭЗТМ
Электростальский завод тяжелого машиностроения
Макет грохота
Модель макета грохота. Трехмерная модель
Грохот для ЭЗТМ
Электростальский завод тяжелого машиностроения
Макет грохота
Модель макета грохота. Трехмерная модель
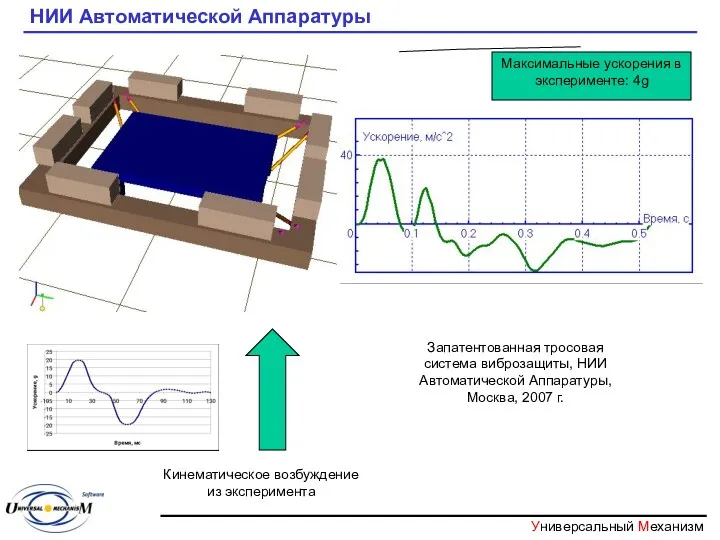
НИИ Автоматической Аппаратуры
Кинематическое возбуждение
из эксперимента
Запатентованная тросовая система виброзащиты, НИИ Автоматической
НИИ Автоматической Аппаратуры
Кинематическое возбуждение
из эксперимента
Запатентованная тросовая система виброзащиты, НИИ Автоматической
Моделирование
Разработчик: к.ф.-м.н. Селенский Е.Е.
Манипулятор «Рука»
Моделирование
Разработчик: к.ф.-м.н. Селенский Е.Е.
Манипулятор «Рука»

Плоская модель гранулярной среды
Моделирование гранулярной среды включает:
создание частиц с
Плоская модель гранулярной среды
Моделирование гранулярной среды включает:
создание частиц с
Плоская модель гранулярной среды
Виброуплотнение
Плоская модель гранулярной среды
Виброуплотнение
Моделирование упругих тел
Портовый кран: первая собственная форма
Более 200 твердых тел
Ленточный конвейер
Моделирование упругих тел
Портовый кран: первая собственная форма
Более 200 твердых тел
Ленточный конвейер
UM FEM: Гибридная модель подвески грузовика
По заказу Hendrickson Pacific Ltd.
Конечно-элементная модель
UM FEM: Гибридная модель подвески грузовика
По заказу Hendrickson Pacific Ltd.
Конечно-элементная модель

UM FEM: принцип работы
Моделирование гибридных систем
(систем твёрдых и упругих тел)
Импорт динамических
UM FEM: принцип работы
Моделирование гибридных систем
(систем твёрдых и упругих тел)
Импорт динамических

UM FEM
Моделирование гибридных систем
Импорт динамических и статических форм из
UM FEM
Моделирование гибридных систем Импорт динамических и статических форм из
Содержание
Примеры моделирования
Механическая система как объект моделирования
Создание моделей
Анализ динамики
Содержание
Примеры моделирования
Механическая система как объект моделирования
Создание моделей
Анализ динамики

Порядок создания и исследования модели
Исходная механическая система
Формирование исходных данных и концепции
Порядок создания и исследования модели
Исходная механическая система
Формирование исходных данных и концепции
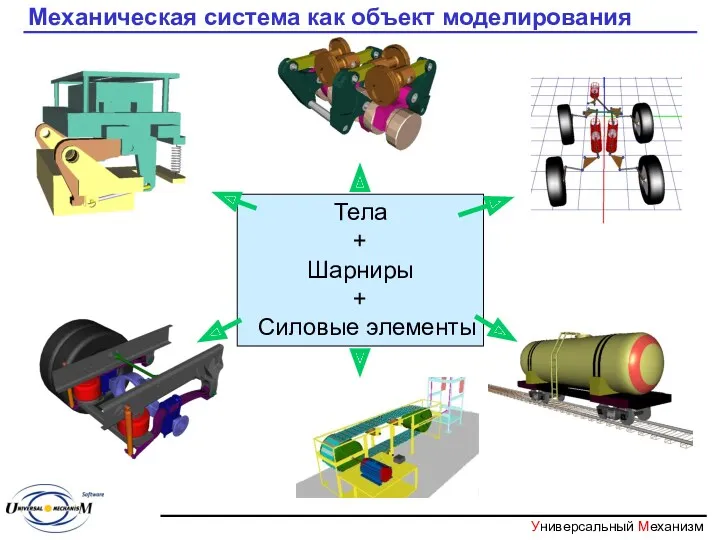
Механическая система как объект моделирования
Тела
+
Шарниры
+
Силовые элементы
Механическая система как объект моделирования
Тела
+
Шарниры
+
Силовые элементы
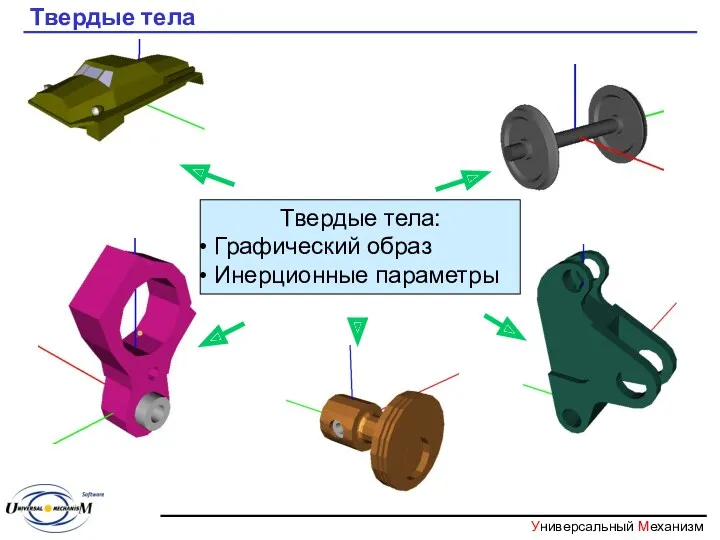
Твердые тела
Твердые тела:
Графический образ
Инерционные параметры
Твердые тела
Твердые тела:
Графический образ
Инерционные параметры
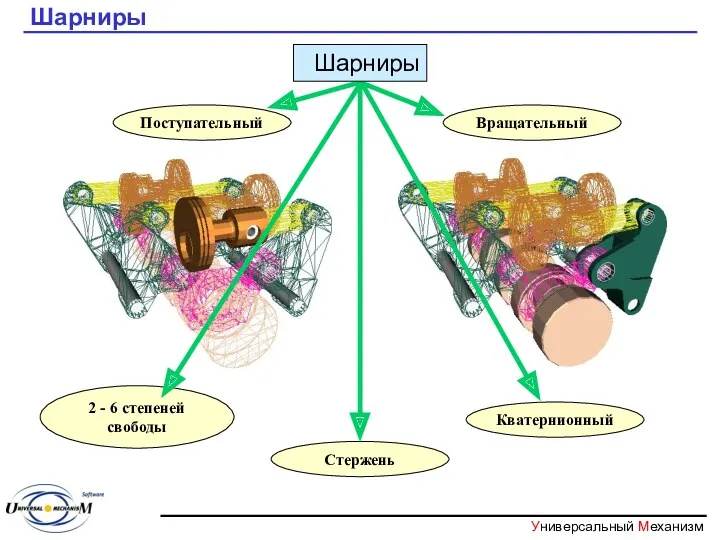
Шарниры
Поступательный
Вращательный
2 - 6 степеней свободы
Кватернионный
Стержень
Шарниры
Шарниры
Поступательный
Вращательный
2 - 6 степеней свободы
Кватернионный
Стержень
Шарниры
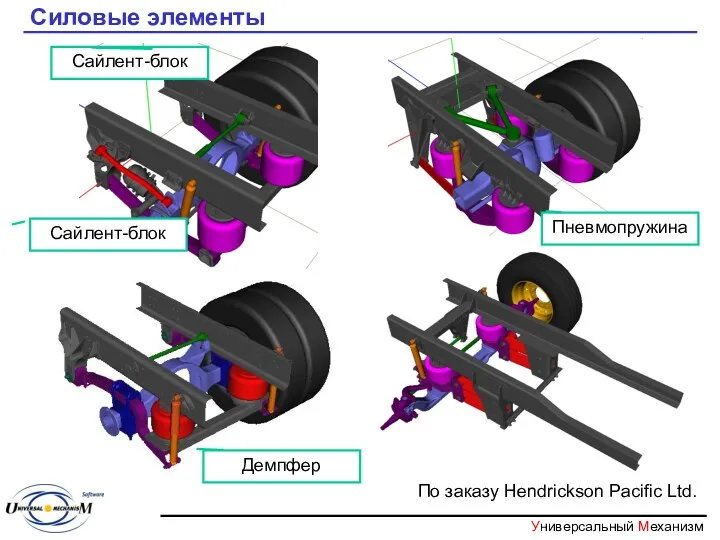
Силовые элементы
По заказу Hendrickson Pacific Ltd.
Демпфер
Пневмопружина
Сайлент-блок
Сайлент-блок
Силовые элементы
По заказу Hendrickson Pacific Ltd.
Демпфер
Пневмопружина
Сайлент-блок
Сайлент-блок
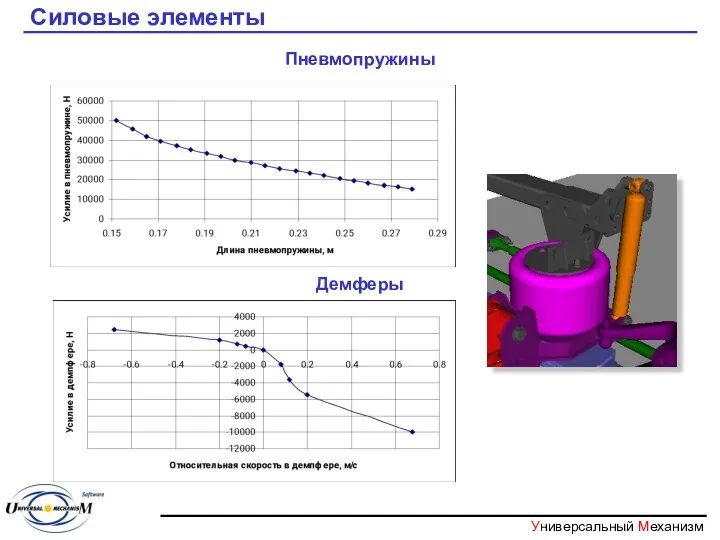
Cиловые элементы
Пневмопружины
Демферы
Cиловые элементы
Пневмопружины
Демферы
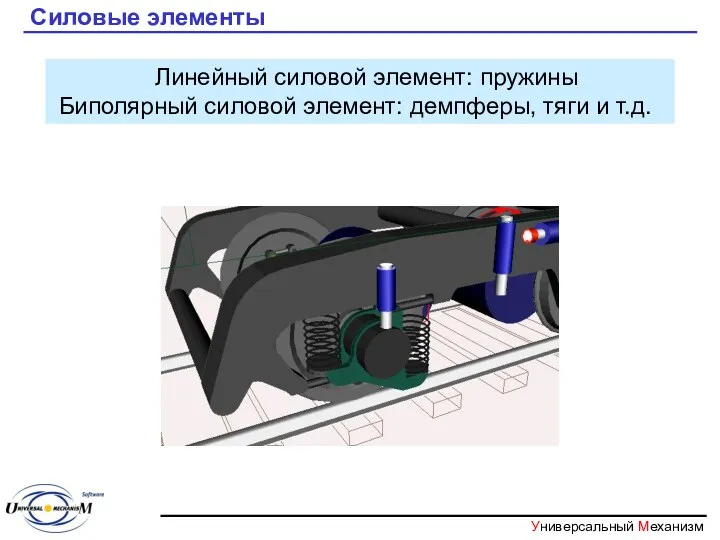
Силовые элементы
Линейный силовой элемент: пружины
Биполярный силовой элемент: демпферы, тяги
Силовые элементы
Линейный силовой элемент: пружины
Биполярный силовой элемент: демпферы, тяги

Контактные силы
Контактные силы:
точка – плоскость, точка – Z-поверхность
Система фрикционного гашения
Контактные силы
Контактные силы:
точка – плоскость, точка – Z-поверхность
Система фрикционного гашения
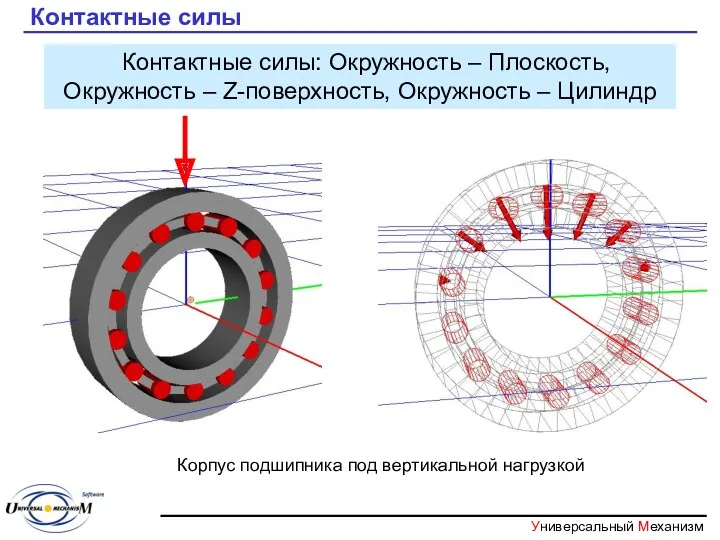
Контактные силы
Контактные силы: Окружность – Плоскость, Окружность – Z-поверхность, Окружность
Контактные силы
Контактные силы: Окружность – Плоскость, Окружность – Z-поверхность, Окружность

Специальные силы
Специальные контактные силы: кулачки
Доступные типы кулачков
Специальные силы
Специальные контактные силы: кулачки
Доступные типы кулачков
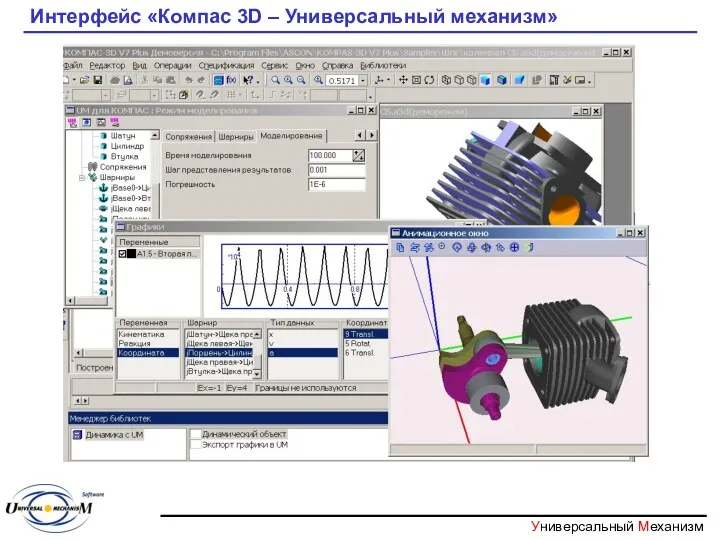
Интерфейс «Компас 3D – Универсальный механизм»
Интерфейс «Компас 3D – Универсальный механизм»
Интерфейс «Компас 3D – Универсальный механизм»
Лобзик
Динамическая библиотека для САПР КОМПАС
«Универсальный Механизм
Интерфейс «Компас 3D – Универсальный механизм»
Лобзик
Динамическая библиотека для САПР КОМПАС
«Универсальный Механизм
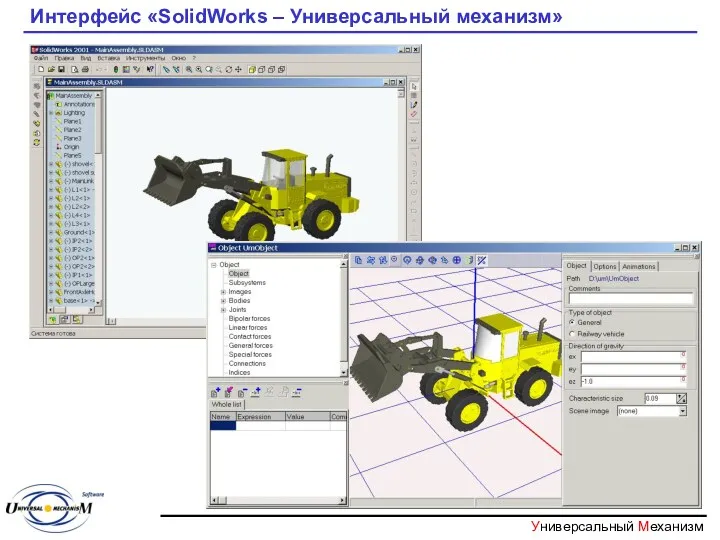
Интерфейс «SolidWorks – Универсальный механизм»
Интерфейс «SolidWorks – Универсальный механизм»
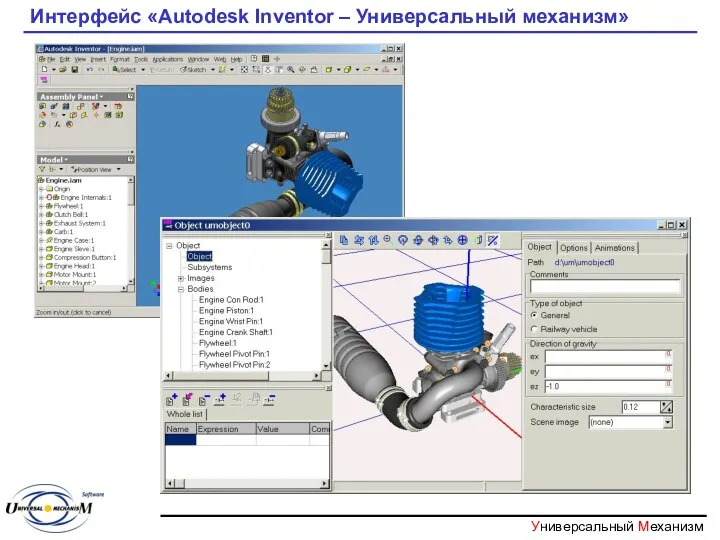
Интерфейс «Autodesk Inventor – Универсальный механизм»
Интерфейс «Autodesk Inventor – Универсальный механизм»
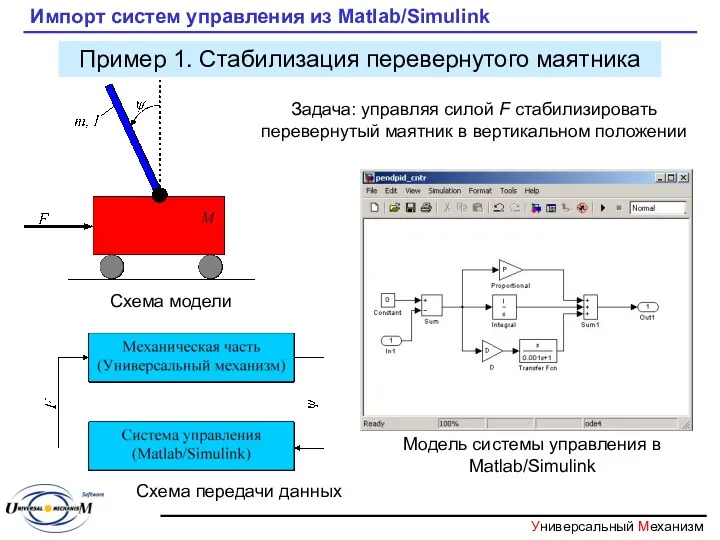
Импорт систем управления из Мatlab/Simulink
Пример 1. Стабилизация перевернутого маятника
Задача: управляя силой
Импорт систем управления из Мatlab/Simulink
Пример 1. Стабилизация перевернутого маятника
Задача: управляя силой

Интерфейс с Matlab/Simulink
Неуправляемое движение
Управляемое движение
Пример 1. Результаты моделирования
Интерфейс с Matlab/Simulink
Неуправляемое движение
Управляемое движение
Пример 1. Результаты моделирования

Интерфейс с Matlab/Simulink
Пример 2. Тяговый привод маневрового локомотива
Локомотив ТЭМ21
Тележка
Двигатель постоянного тока
Интерфейс с Matlab/Simulink
Пример 2. Тяговый привод маневрового локомотива
Локомотив ТЭМ21
Тележка
Двигатель постоянного тока

Интерфейс с Matlab/Simulink
Пример 3. Электропривод конвейера
Плоская модель конвейера. Модель асинхронного двигателя
Интерфейс с Matlab/Simulink
Пример 3. Электропривод конвейера
Плоская модель конвейера. Модель асинхронного двигателя
Интерфейс с Matlab/Simulink
В центральную ступень
подвески пассажирского вагона добавлен
управляемый силовой элемент.
Интерфейс с Matlab/Simulink
В центральную ступень
подвески пассажирского вагона добавлен
управляемый силовой элемент.
Интерфейс с Matlab/Simulink
Ускорения пола кузова
Неуправляемая система
Управляемая система
Интерфейс с Matlab/Simulink
Ускорения пола кузова
Неуправляемая система
Управляемая система
Содержание
Примеры моделирования
Механическая система как объект моделирования
Создание моделей
Анализ динамики
Содержание
Примеры моделирования
Механическая система как объект моделирования
Создание моделей
Анализ динамики
Создание моделей: Модуль ввода
Вид программы описания моделей
Список элементов
Список идентификаторов
Инспектор данных
Создание моделей: Модуль ввода
Вид программы описания моделей
Список элементов
Список идентификаторов
Инспектор данных
Уравнение движения
Вывод уравнений в символьной форме и использованием встроенной системы компьютерной
Уравнение движения
Вывод уравнений в символьной форме и использованием встроенной системы компьютерной
Содержание
Примеры моделирования
Механическая система как объект моделирования
Создание моделей
Анализ динамики
Содержание
Примеры моделирования
Механическая система как объект моделирования
Создание моделей
Анализ динамики
Анализ динамики моделей
Вид программы моделирования
Любое число анимационных и графических окон
Анализ динамики моделей
Вид программы моделирования
Любое число анимационных и графических окон

Моделирование
Двигатель: прямая задача динамики
Непосредственное представление результатов
3D анимация движения системы;
3D
Моделирование
Двигатель: прямая задача динамики
Непосредственное представление результатов
3D анимация движения системы;
3D

Моделирование
Анимация движения и траекторий
Решение прямой и обратной задачи кинематики
Моделирование
Анимация движения и траекторий
Решение прямой и обратной задачи кинематики

Инструменты моделирования
Анализ переменных (динамических показателей)
Каждая переменная может быть обработана с помощью
Табличного
Инструменты моделирования
Анализ переменных (динамических показателей)
Каждая переменная может быть обработана с помощью
Табличного
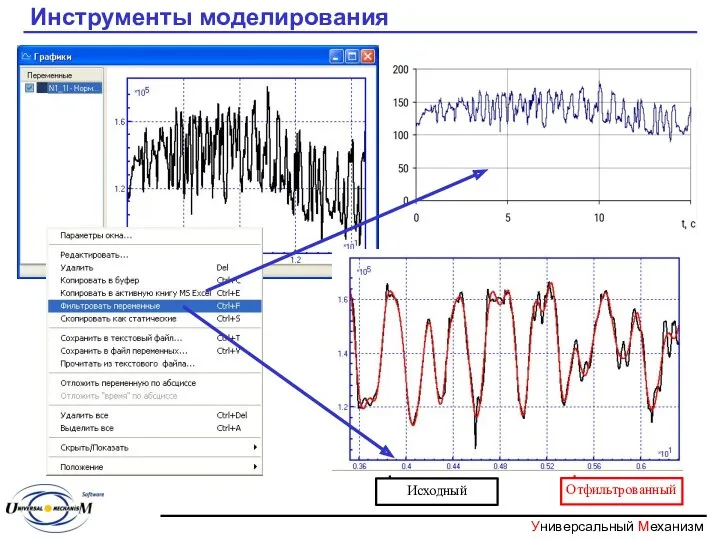
Инструменты моделирования
Исходный
Отфильтрованный
Инструменты моделирования
Исходный
Отфильтрованный
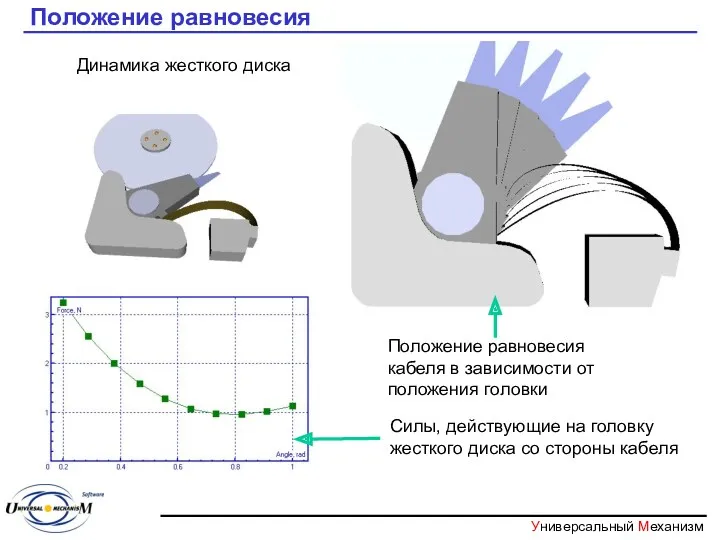
Положение равновесия
Положение равновесия кабеля в зависимости от положения головки
Динамика жесткого диска
Силы,
Положение равновесия
Положение равновесия кабеля в зависимости от положения головки
Динамика жесткого диска
Силы,
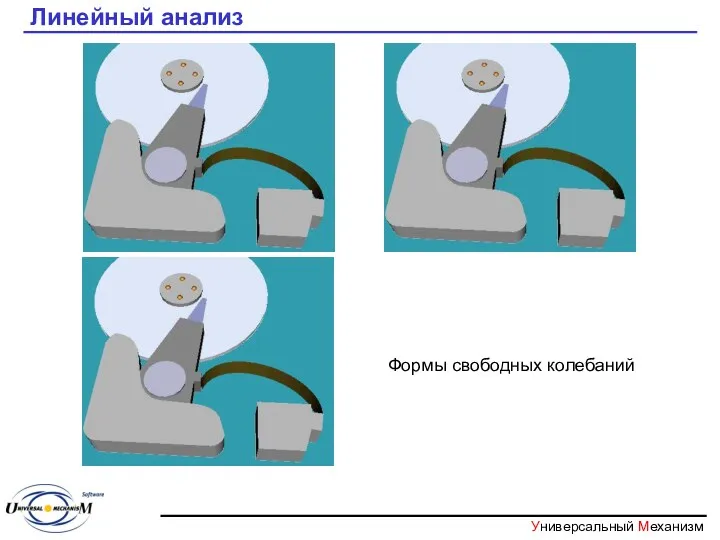
Линейный анализ
Формы свободных колебаний
Линейный анализ
Формы свободных колебаний
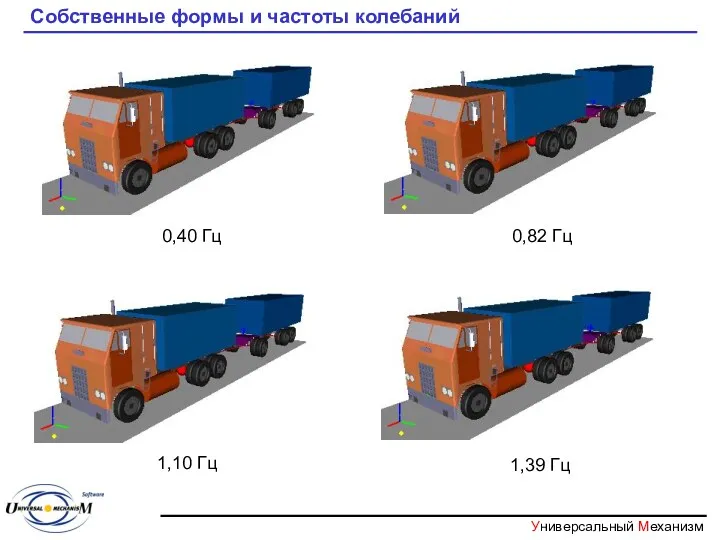
Собственные формы и частоты колебаний
0,40 Гц
1,10 Гц
0,82 Гц
1,39 Гц
Собственные формы и частоты колебаний
0,40 Гц
1,10 Гц
0,82 Гц
1,39 Гц
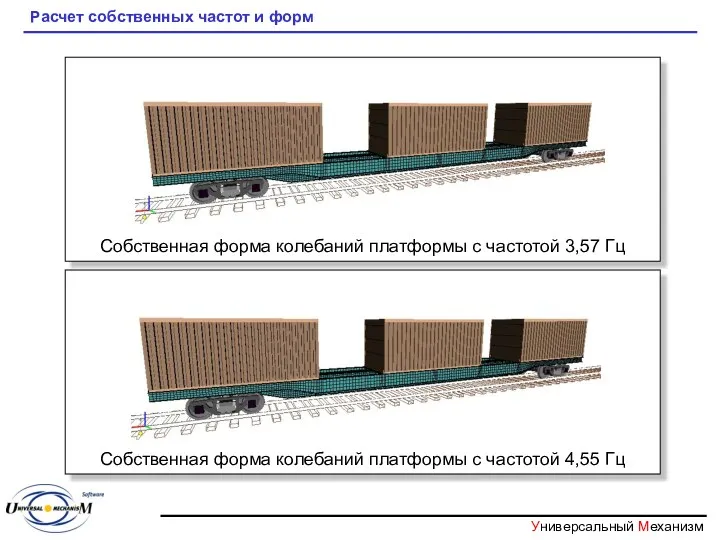
Расчет собственных частот и форм
Собственная форма колебаний платформы с частотой 3,57
Расчет собственных частот и форм
Собственная форма колебаний платформы с частотой 3,57
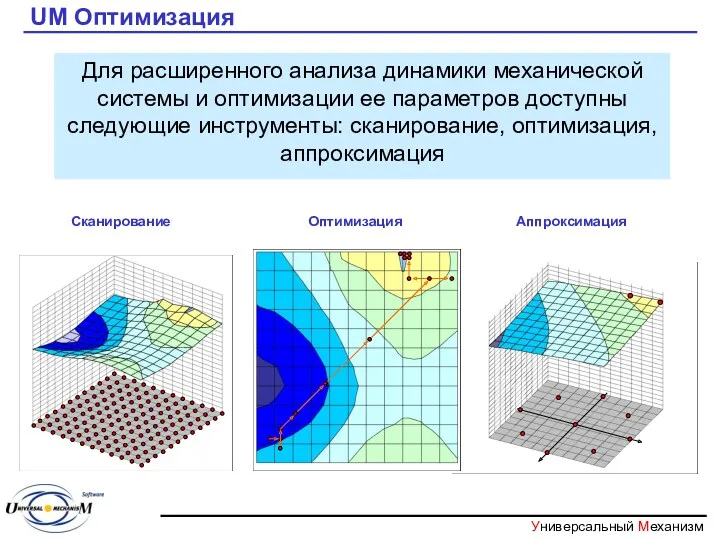
UM Оптимизация
Сканирование
Оптимизация
Аппроксимация
Для расширенного анализа динамики механической системы и оптимизации ее параметров
UM Оптимизация
Сканирование
Оптимизация
Аппроксимация
Для расширенного анализа динамики механической системы и оптимизации ее параметров
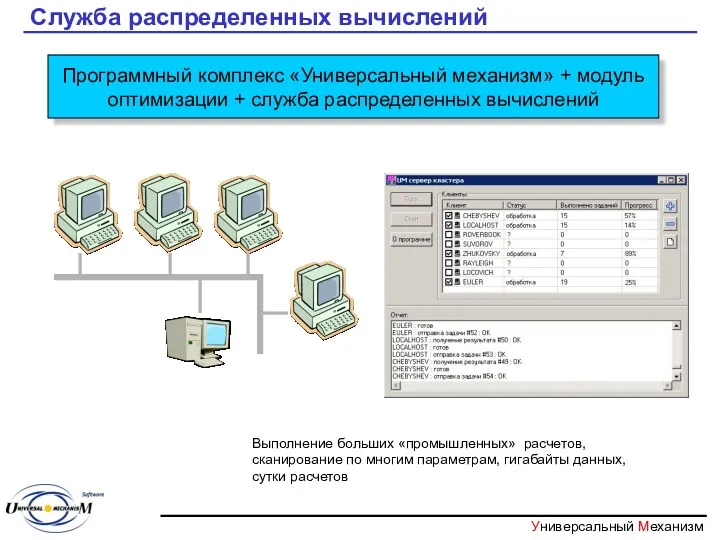
Служба распределенных вычислений
Программный комплекс «Универсальный механизм» + модуль оптимизации + служба
Служба распределенных вычислений
Программный комплекс «Универсальный механизм» + модуль оптимизации + служба
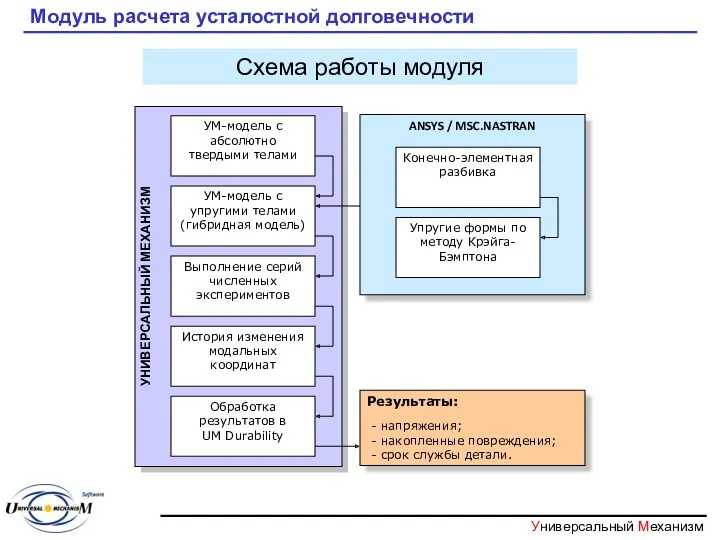
Модуль расчета усталостной долговечности
Схема работы модуля
Модуль расчета усталостной долговечности
Схема работы модуля

Долговечность: анализ эксплуатационной нагруженности
Выделение частных режимов эксплуатации
Создание моделей и проведение численных
Долговечность: анализ эксплуатационной нагруженности
Выделение частных режимов эксплуатации
Создание моделей и проведение численных
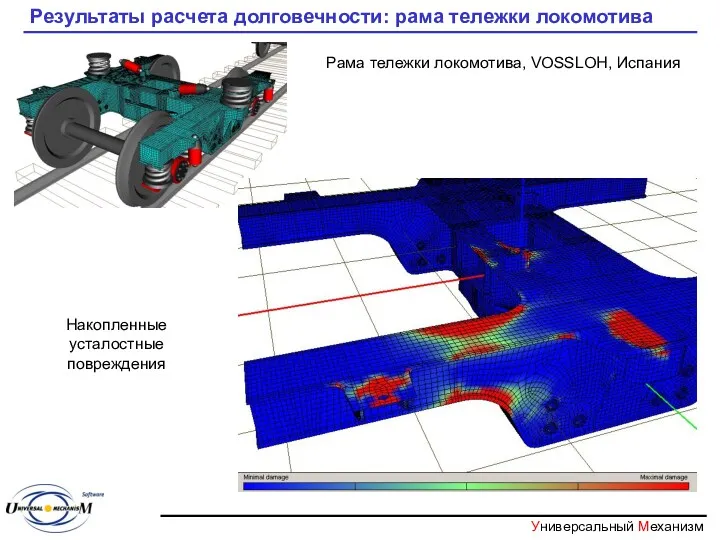
Результаты расчета долговечности: рама тележки локомотива
Рама тележки локомотива, VOSSLOH, Испания
Накопленные усталостные
Результаты расчета долговечности: рама тележки локомотива
Рама тележки локомотива, VOSSLOH, Испания
Накопленные усталостные
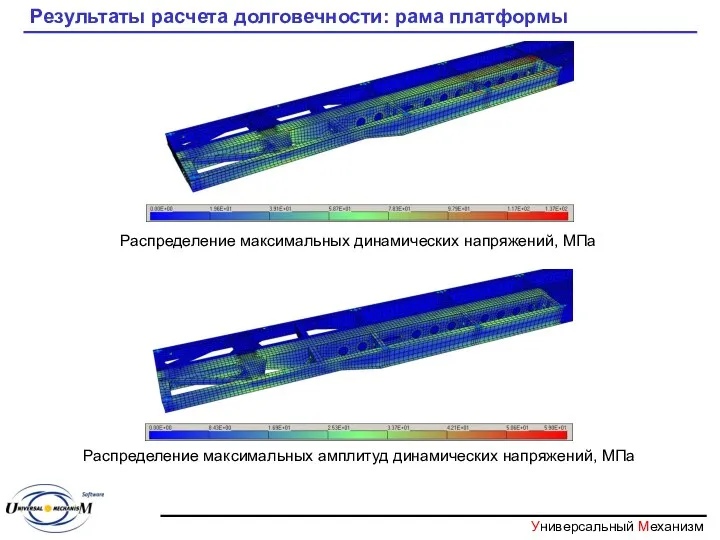
Результаты расчета долговечности: рама платформы
Распределение максимальных динамических напряжений, МПа
Распределение максимальных амплитуд
Результаты расчета долговечности: рама платформы
Распределение максимальных динамических напряжений, МПа
Распределение максимальных амплитуд
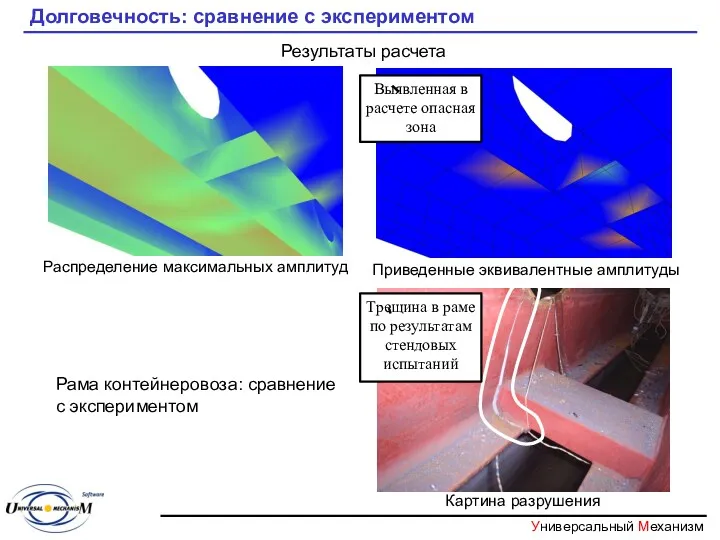
Долговечность: сравнение с экспериментом
Распределение максимальных амплитуд
Приведенные эквивалентные амплитуды
Картина разрушения
Результаты расчета
Рама
Долговечность: сравнение с экспериментом
Распределение максимальных амплитуд
Приведенные эквивалентные амплитуды
Картина разрушения
Результаты расчета
Рама
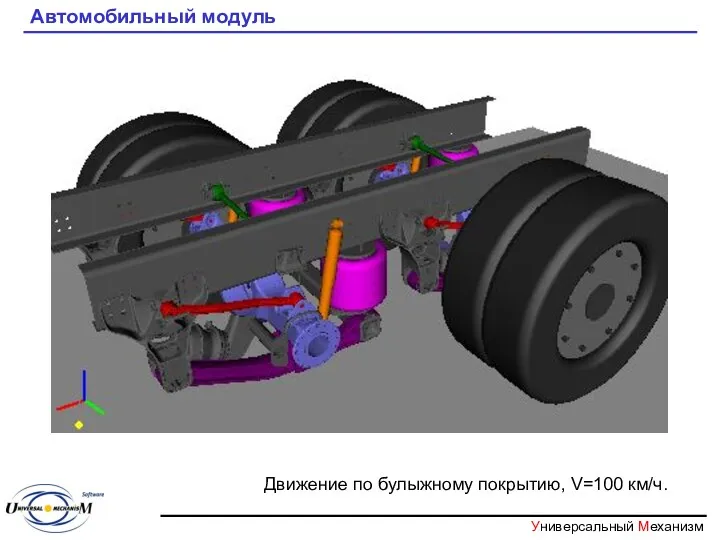
Автомобильный модуль
Движение по булыжному покрытию, V=100 км/ч.
Автомобильный модуль
Движение по булыжному покрытию, V=100 км/ч.

Автомобильный модуль: модели шин, библиотека подвесок
Модели шин
Магическая формула
Пасейки
Модель
Fiala
Табличные и
Автомобильный модуль: модели шин, библиотека подвесок
Модели шин
Магическая формула
Пасейки
Модель
Fiala
Табличные и
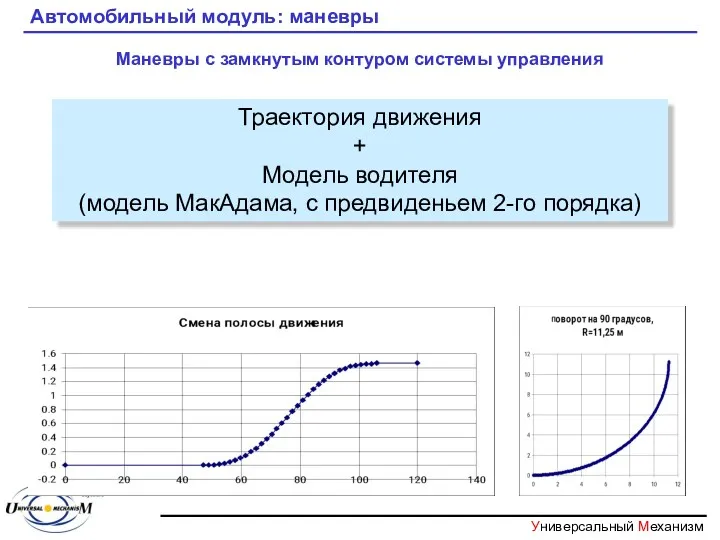
Автомобильный модуль: маневры
Маневры с замкнутым контуром системы управления
Траектория движения
+
Модель водителя
(модель
Автомобильный модуль: маневры
Маневры с замкнутым контуром системы управления
Траектория движения
+
Модель водителя
(модель

Железнодорожный модуль
Модуль моделирования железнодорожных экипажей:
более 30 моделей
Пассажирский вагон
Цистерна
Трамвай
Вагон метро
Электровоз
Тепловоз
Железнодорожный модуль
Модуль моделирования железнодорожных экипажей:
более 30 моделей
Пассажирский вагон
Цистерна
Трамвай
Вагон метро
Электровоз
Тепловоз

Железнодорожные экипажи: база моделей локомотивов России
В 2006 г. совместно с ВНИКТИ
Железнодорожные экипажи: база моделей локомотивов России
В 2006 г. совместно с ВНИКТИ
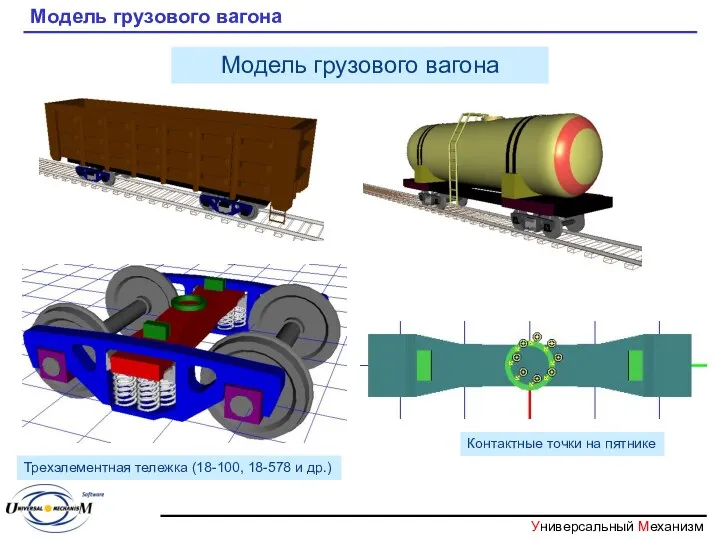
Модель грузового вагона
Трехэлементная тележка (18-100, 18-578 и др.)
Контактные точки на пятнике
Модель
Модель грузового вагона
Трехэлементная тележка (18-100, 18-578 и др.)
Контактные точки на пятнике
Модель
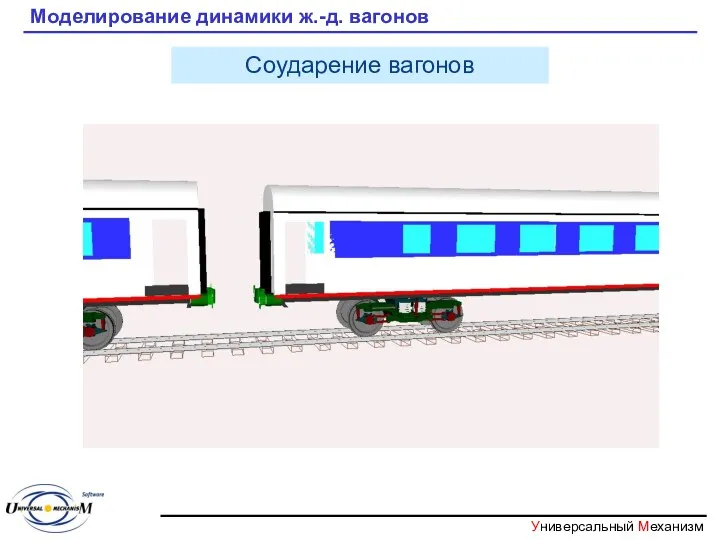
Соударение вагонов
Моделирование динамики ж.-д. вагонов
Соударение вагонов
Моделирование динамики ж.-д. вагонов
Содержание
Примеры моделирования
Механическая система как объект моделирования
Создание моделей
Содержание
Примеры моделирования
Механическая система как объект моделирования
Создание моделей
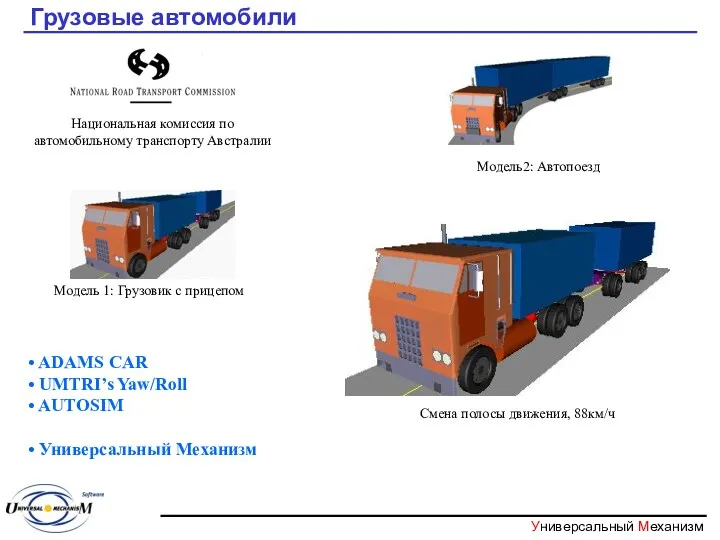
Грузовые автомобили
Национальная комиссия по автомобильному транспорту Австралии
Модель 1: Грузовик с прицепом
Модель2:
Грузовые автомобили
Национальная комиссия по автомобильному транспорту Австралии
Модель 1: Грузовик с прицепом
Модель2:
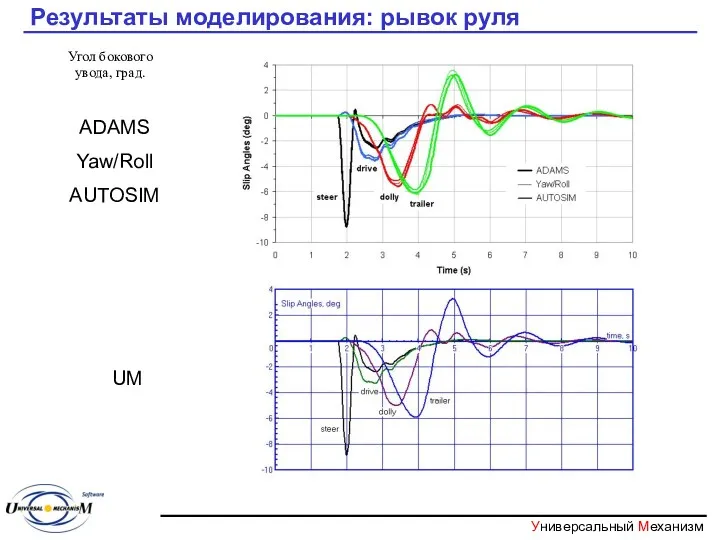
Результаты моделирования: рывок руля
Угол бокового
увода, град.
ADAMS
Yaw/Roll
AUTOSIM
UM
Результаты моделирования: рывок руля
Угол бокового
увода, град.
ADAMS
Yaw/Roll
AUTOSIM
UM
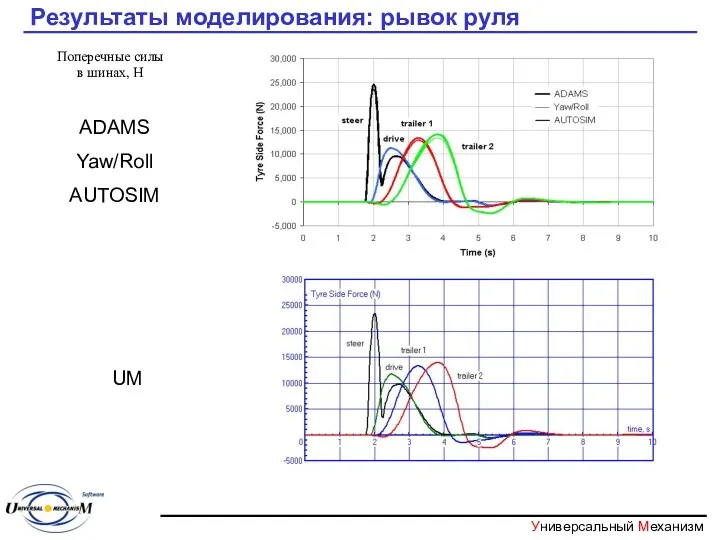
Результаты моделирования: рывок руля
Поперечные силы в шинах, Н
ADAMS
Yaw/Roll
AUTOSIM
UM
Результаты моделирования: рывок руля
Поперечные силы в шинах, Н
ADAMS
Yaw/Roll
AUTOSIM
UM
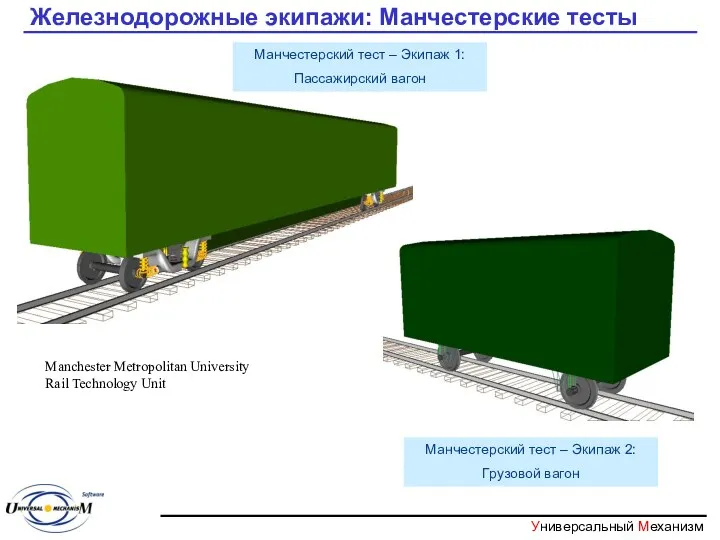
Железнодорожные экипажи: Манчестерские тесты
Манчестерский тест – Экипаж 1:
Пассажирский вагон
Манчестерский тест
Железнодорожные экипажи: Манчестерские тесты
Манчестерский тест – Экипаж 1:
Пассажирский вагон
Манчестерский тест
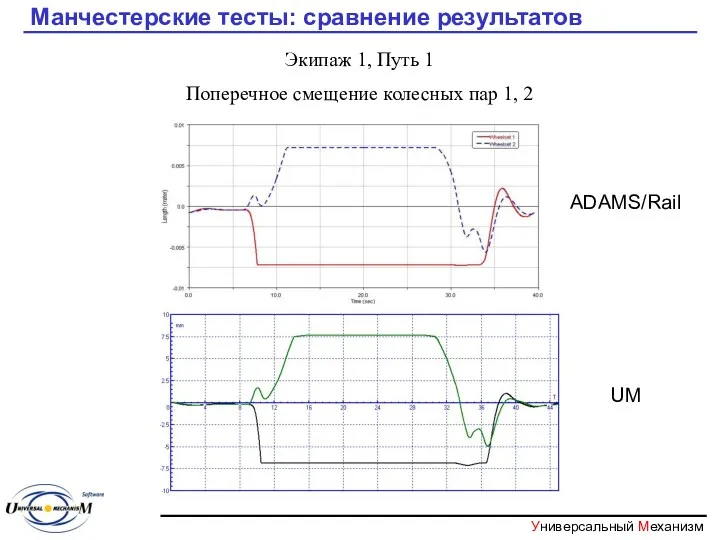
Манчестерские тесты: сравнение результатов
Экипаж 1, Путь 1
Поперечное смещение колесных пар 1,
Манчестерские тесты: сравнение результатов
Экипаж 1, Путь 1
Поперечное смещение колесных пар 1,
Манчестерские тесты: сравнение результатов
Экипаж 1, Путь 1
Угол виляния колесных пар 1,
Манчестерские тесты: сравнение результатов
Экипаж 1, Путь 1
Угол виляния колесных пар 1,
Манчестерские тесты: сравнение результатов
Экипаж 1, Путь 1
Направляющие силы на колесной
Манчестерские тесты: сравнение результатов
Экипаж 1, Путь 1
Направляющие силы на колесной
Сравнение с экспериментами
В работах В.И. Сакало и В.С. Коссова рассматривается динамика локомотива ТЭ116
Сравнение с экспериментами
В работах В.И. Сакало и В.С. Коссова рассматривается динамика локомотива ТЭ116
 1С:Документооборот 8. Настройка прав доступа
1С:Документооборот 8. Настройка прав доступа Локальная сеть_урок в 11 классе
Локальная сеть_урок в 11 классе Оқу орындарына wi-fi керек пе?
Оқу орындарына wi-fi керек пе? Программирование на языке Паскаль. Массивы (часть 2)
Программирование на языке Паскаль. Массивы (часть 2) Умение оценивать объёма памяти для хранения текстовых данных. ОГЭ - 5
Умение оценивать объёма памяти для хранения текстовых данных. ОГЭ - 5 Сети центров общения Надежда. Новый формат сотрудничества на условиях франчайзинга
Сети центров общения Надежда. Новый формат сотрудничества на условиях франчайзинга Хранение информации. Базы данных
Хранение информации. Базы данных Электронное портфолио студента
Электронное портфолио студента Работа в текстовом процессоре основные приемы редактирования текста
Работа в текстовом процессоре основные приемы редактирования текста презентация к учебнику информатика и ИКТ 10 класс Семакин
презентация к учебнику информатика и ИКТ 10 класс Семакин SAFA results: aircraft types Russian Federation State of Design
SAFA results: aircraft types Russian Federation State of Design Переход на 1C:ERP из других конфигураций
Переход на 1C:ERP из других конфигураций Web browser
Web browser Общение в Интернете в реальном времени
Общение в Интернете в реальном времени Шифр және шифрлау
Шифр және шифрлау Курсы по тестированию IT LABS. UNIX. Основные команды. Man. (Урок 6)
Курсы по тестированию IT LABS. UNIX. Основные команды. Man. (Урок 6) Алгоритмы обработки массивов
Алгоритмы обработки массивов Решение задания ОГЭ по информатике
Решение задания ОГЭ по информатике Основы системного анализа
Основы системного анализа Графические возможности PascalABC
Графические возможности PascalABC Графика и компьютер
Графика и компьютер Урок информатики по учебнику ПлаксинаМ.А. тема Как человек общается с компьютером,Как управлять компьютером с помощью мыши
Урок информатики по учебнику ПлаксинаМ.А. тема Как человек общается с компьютером,Как управлять компьютером с помощью мыши Базовые аспекты общей информатики
Базовые аспекты общей информатики Надежность информации. Основные определения
Надежность информации. Основные определения Программные средства человеко-машинного интерфейса
Программные средства человеко-машинного интерфейса Обслуживание ввода - вывода
Обслуживание ввода - вывода Бұлтты Web қызметі. Мобильді технологиялардың негізгі терминдер мен тұжырымдармалары. Мобильді қызметтер
Бұлтты Web қызметі. Мобильді технологиялардың негізгі терминдер мен тұжырымдармалары. Мобильді қызметтер Активизация мыслительной деятельности воспитанников на уроках физики с использованием ИКТ
Активизация мыслительной деятельности воспитанников на уроках физики с использованием ИКТ