- Синхронизация процессов и потоков. Межпроцессное взаимодействие

Содержание
- 2. Проблема соревнования Важной проблемой является обеспечение совместной работы процессов без создания взаимных помех, когда, к примеру,
- 3. Процесс А считывает значение переменной in и сохраняет значение 7 в локальной переменной по имени next_free_slot
- 4. Процесс Б продолжает выполняться. Он сохраняет имя своего файла в области 7 и присваивает переменной in
- 5. Критические области Ключом к предупреждению проблемы соревнования в этой и во многих других ситуациях использования общей
- 6. Хотя выполнение этого требования позволяет избежать соревновательных ситуаций, его недостаточно для того, чтобы параллельные процессы правильно
- 7. Процесс А входит в свою критическую область во время T1. Когда наступает время T2, процесс Б
- 8. В отличие от процессов, потоки имеют общее адресное пространство (взаимодействующие потоки, реализованные в различных адресных пространствах,
- 9. Аппаратные инструкции синхронизации Аппаратные инструкции синхронизации реализуют атомарные примитивные операции, на основе которых можно строить механизмы
- 10. Compare-and-swap (CAS) Инструкции типа compare-and-swap записывают в регистр новое значение и при этом проверяют, что старое
- 11. Системные механизмы синхронизации Семафор Семафор — это примитив синхронизации, позволяющий ограничить доступ к критической секции только
- 12. Приведем решение задачи производителя-потребителя при помощи семафоров. Для этого операцию изменения буфера поместим в критическую секцию.
- 13. semaphore mutex = 1; semaphore empty = N; semaphore full = 0; void producer(void) { int
- 14. Мьютекс (mutex) Мьютекс — от словосочетания mutual exclusion, те. взаимное исключение — это примитив синхронизации, напоминающий
- 15. Условная переменная (condition variable) Условная переменная — примитив синхронизации, позволяющий реализовать ожидание какого-то события и оповещение
- 16. Механизмы синхронизации в Win32 API Функции ожидания. Процедурные методы синхронизации в Windows используются по отношению к
- 17. В функцию WaitForSingleObject передаются два параметра: описатель объекта и значение таймаута. Таймаут определяет предельное время нахождения
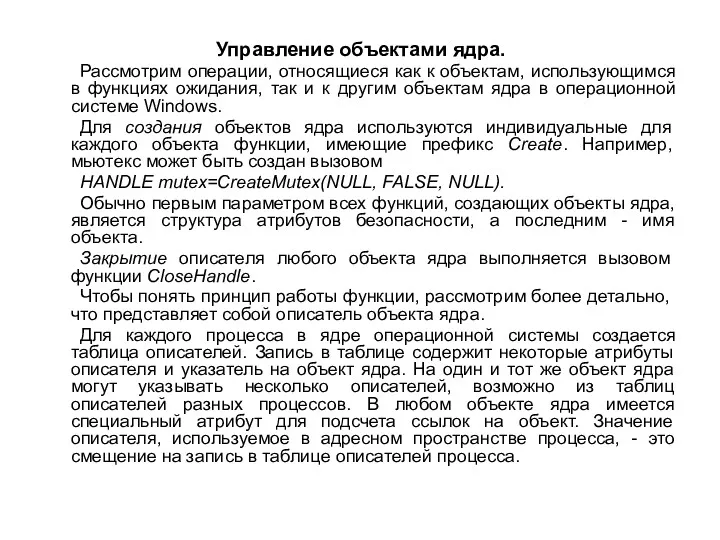
- 18. Управление объектами ядра. Рассмотрим операции, относящиеся как к объектам, использующимся в функциях ожидания, так и к
- 20. При закрытии описателя происходит модификация атрибута, указывающего на то, что запись теперь недействительна. Далее происходит декремент
- 21. Можно воспользоваться функциями GetHandlelnformation и SetHandlelnformation для изменения атрибутов описателя уже после создания объекта ядра. Наследование
- 23. Дочерний процесс может использовать ссылки на унаследованные объекты ядра. Для передачи значений унаследованных описателей в дочерний
- 24. Механизм ссылки на объекты ядра подходит для всех случаев взаимодействия, когда можно определить соглашения на имена
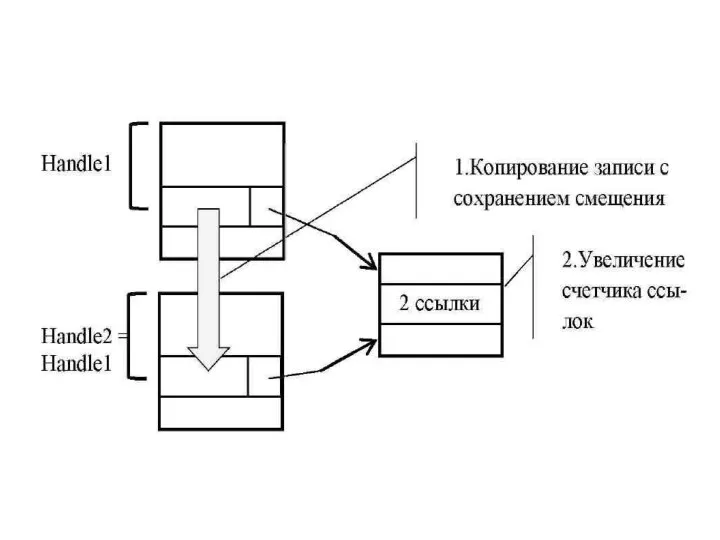
- 25. В дублировании принимают участие (в общем случае) три процесса: процесс, выполняющий дублирование, процесс-источник и процесс-приемник. Если
- 26. События События используются при реализации кооперативной синхронизации, когда один процесс (поток) ждет поступления данных от другого.
- 27. Во время выполнения функции SetEvent событие устанавливается в сигнальное состояние. Дальнейшие действия зависят от типа события.
- 28. Семафоры Семафоры - универсальные объекты процедурной синхронизации, предложены Э. Дейкстра. Семафоры выполняют роль счетчика числа доступных
- 29. Инкремент счетчика семафора выполняется при помощи вызова функции BOOL ReleaseSemaphore (HANDLE, LONG ReleaseCount). В ней, в
- 30. Мьютексы Мьютекс специально предназначен для решения задачи взаимного исключения, защиты критической секции. Для создания мьютекса используется
- 31. Если поток владеет мьютексом, то вызов функции ожидания с этим мьютексом завершится успешно, при этом увеличится
- 32. Межпроцессное взаимодействие Реализация межпроцессного взаимодействия выполняется тремя основными методами: совместно используемой памяти (shared memory), отображаемой памяти
- 33. На практике используют следующие методы передачи сообщений. Канал представляет собой циклический буфер, в который запись выполняет
- 34. Неблокирующая синхронизация Неблокирующая синхронизация — это группа подходов, которые ставят своей целью решить проблемы синхронизации альтернативным
- 35. В теоретических работахы такой подход получил название взаимодействующие параллельные процессы (Communicating Parallel Processes, CPP). Практическая реализация
- 37. Скачать презентацию
Проблема соревнования
Важной проблемой является обеспечение совместной работы процессов без создания взаимных
Проблема соревнования
Важной проблемой является обеспечение совместной работы процессов без создания взаимных
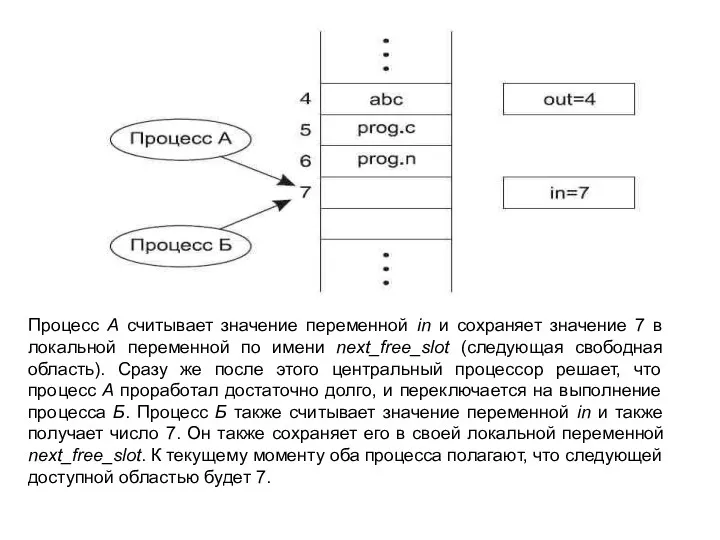
Процесс А считывает значение переменной in и сохраняет значение 7 в
Процесс А считывает значение переменной in и сохраняет значение 7 в
Процесс Б продолжает выполняться. Он сохраняет имя своего файла в области
Процесс Б продолжает выполняться. Он сохраняет имя своего файла в области
Критические области
Ключом к предупреждению проблемы соревнования в этой и во многих
Критические области
Ключом к предупреждению проблемы соревнования в этой и во многих
Хотя выполнение этого требования позволяет избежать соревновательных ситуаций, его недостаточно для
Хотя выполнение этого требования позволяет избежать соревновательных ситуаций, его недостаточно для
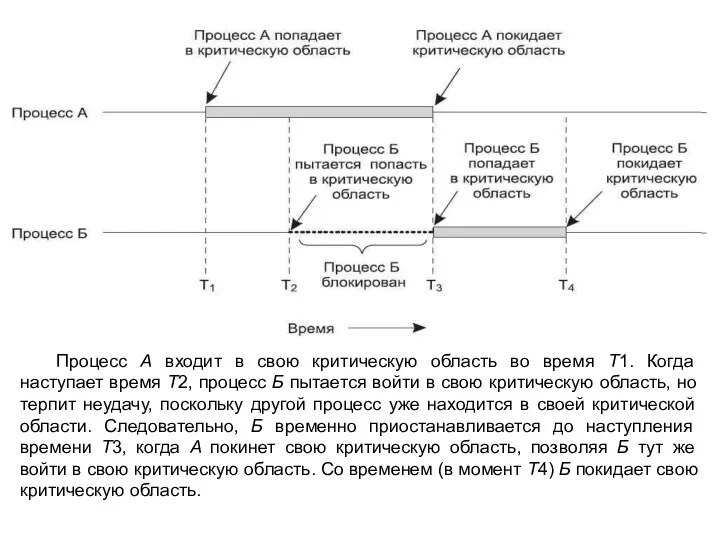
Процесс А входит в свою критическую область во время T1. Когда
Процесс А входит в свою критическую область во время T1. Когда
В отличие от процессов, потоки имеют общее адресное пространство (взаимодействующие потоки,
В отличие от процессов, потоки имеют общее адресное пространство (взаимодействующие потоки,
Аппаратные инструкции синхронизации
Аппаратные инструкции синхронизации реализуют атомарные примитивные операции, на
Аппаратные инструкции синхронизации
Аппаратные инструкции синхронизации реализуют атомарные примитивные операции, на
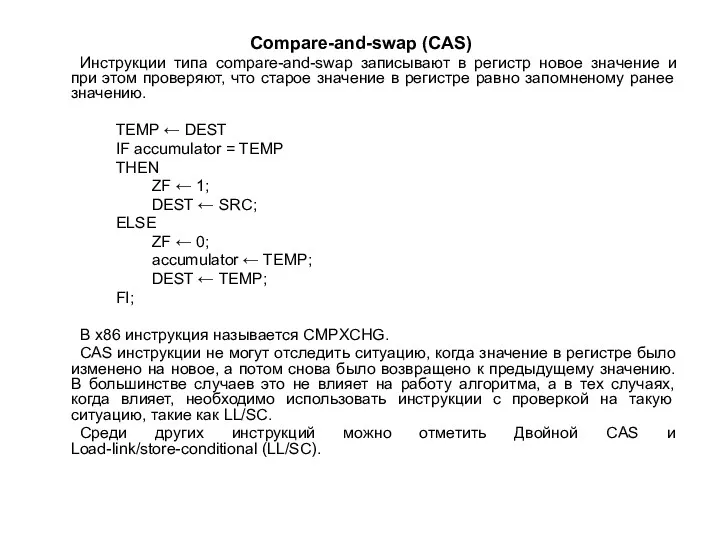
Compare-and-swap (CAS)
Инструкции типа compare-and-swap записывают в регистр новое значение и при
Compare-and-swap (CAS)
Инструкции типа compare-and-swap записывают в регистр новое значение и при
Системные механизмы синхронизации
Семафор
Семафор — это примитив синхронизации, позволяющий ограничить доступ
Системные механизмы синхронизации
Семафор
Семафор — это примитив синхронизации, позволяющий ограничить доступ
Приведем решение задачи производителя-потребителя при помощи семафоров. Для этого операцию изменения
Приведем решение задачи производителя-потребителя при помощи семафоров. Для этого операцию изменения
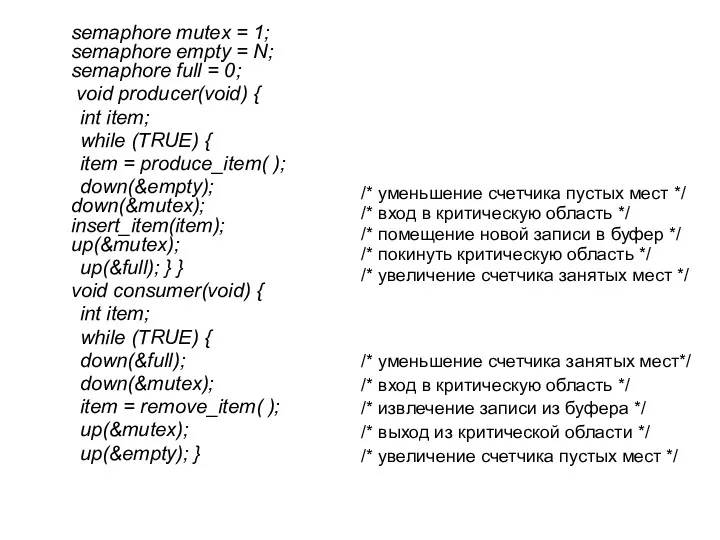
semaphore mutex = 1; semaphore empty = N; semaphore full =
semaphore mutex = 1; semaphore empty = N; semaphore full =
Мьютекс (mutex)
Мьютекс — от словосочетания mutual exclusion, те. взаимное исключение —
Мьютекс (mutex)
Мьютекс — от словосочетания mutual exclusion, те. взаимное исключение —
Условная переменная (condition variable)
Условная переменная — примитив синхронизации, позволяющий
Условная переменная (condition variable)
Условная переменная — примитив синхронизации, позволяющий
Механизмы синхронизации в Win32 API
Функции ожидания.
Процедурные методы синхронизации в Windows
Механизмы синхронизации в Win32 API
Функции ожидания.
Процедурные методы синхронизации в Windows
В функцию WaitForSingleObject передаются два параметра: описатель объекта и значение таймаута.
В функцию WaitForSingleObject передаются два параметра: описатель объекта и значение таймаута.
Управление объектами ядра.
Рассмотрим операции, относящиеся как к объектам, использующимся в
Управление объектами ядра.
Рассмотрим операции, относящиеся как к объектам, использующимся в
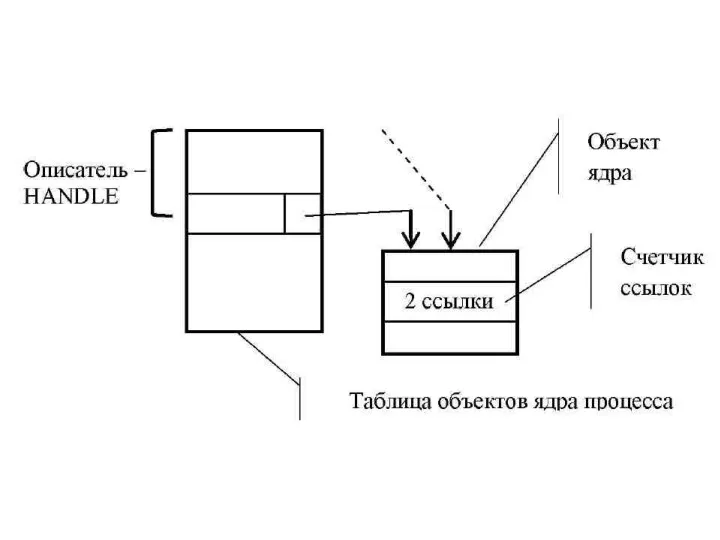
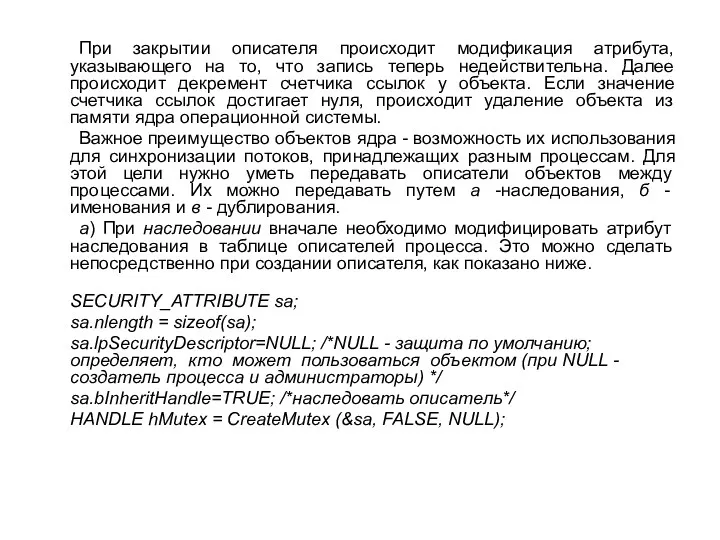
При закрытии описателя происходит модификация атрибута, указывающего на то, что запись
При закрытии описателя происходит модификация атрибута, указывающего на то, что запись
Можно воспользоваться функциями GetHandlelnformation и SetHandlelnformation для изменения атрибутов описателя уже
Можно воспользоваться функциями GetHandlelnformation и SetHandlelnformation для изменения атрибутов описателя уже
Дочерний процесс может использовать ссылки на унаследованные объекты ядра. Для передачи
Дочерний процесс может использовать ссылки на унаследованные объекты ядра. Для передачи
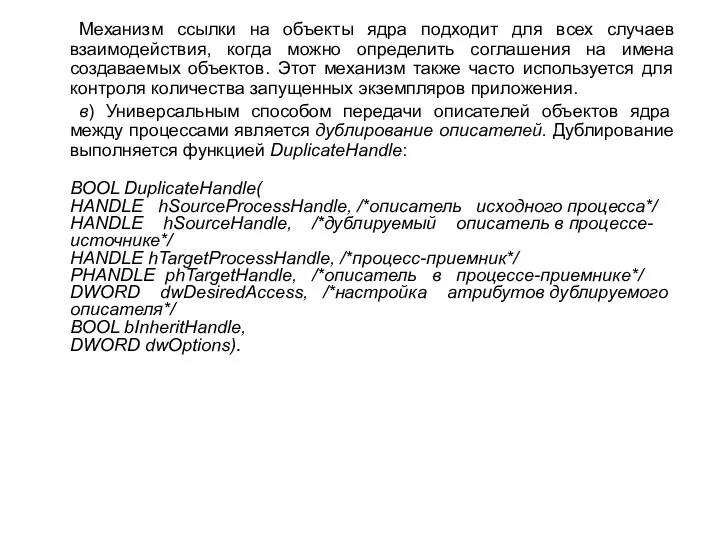
Механизм ссылки на объекты ядра подходит для всех случаев взаимодействия, когда
Механизм ссылки на объекты ядра подходит для всех случаев взаимодействия, когда
В дублировании принимают участие (в общем случае) три процесса: процесс, выполняющий
В дублировании принимают участие (в общем случае) три процесса: процесс, выполняющий
События
События используются при реализации кооперативной синхронизации, когда один процесс (поток)
События
События используются при реализации кооперативной синхронизации, когда один процесс (поток)
Во время выполнения функции SetEvent событие устанавливается в сигнальное состояние. Дальнейшие
Во время выполнения функции SetEvent событие устанавливается в сигнальное состояние. Дальнейшие
Семафоры
Семафоры - универсальные объекты процедурной синхронизации, предложены Э. Дейкстра. Семафоры выполняют
Семафоры
Семафоры - универсальные объекты процедурной синхронизации, предложены Э. Дейкстра. Семафоры выполняют
Инкремент счетчика семафора выполняется при помощи вызова функции BOOL ReleaseSemaphore (HANDLE,
Инкремент счетчика семафора выполняется при помощи вызова функции BOOL ReleaseSemaphore (HANDLE,
Мьютексы
Мьютекс специально предназначен для решения задачи взаимного исключения, защиты критической секции.
Мьютексы
Мьютекс специально предназначен для решения задачи взаимного исключения, защиты критической секции.
Если поток владеет мьютексом, то вызов функции ожидания с этим мьютексом
Если поток владеет мьютексом, то вызов функции ожидания с этим мьютексом
Межпроцессное взаимодействие
Реализация межпроцессного взаимодействия выполняется тремя основными методами: совместно используемой памяти
Межпроцессное взаимодействие
Реализация межпроцессного взаимодействия выполняется тремя основными методами: совместно используемой памяти
На практике используют следующие методы передачи сообщений.
Канал представляет собой циклический буфер,
На практике используют следующие методы передачи сообщений.
Канал представляет собой циклический буфер,
Неблокирующая синхронизация
Неблокирующая синхронизация — это группа подходов, которые ставят своей целью
Неблокирующая синхронизация
Неблокирующая синхронизация — это группа подходов, которые ставят своей целью
В теоретических работахы такой подход получил название взаимодействующие параллельные процессы (Communicating
В теоретических работахы такой подход получил название взаимодействующие параллельные процессы (Communicating
 Презентация к уроку
Презентация к уроку Лекция 2 (продолжение). Массивы, описание, передача в функцию в качестве параметров
Лекция 2 (продолжение). Массивы, описание, передача в функцию в качестве параметров Основные принципы технологии клиент-сервер
Основные принципы технологии клиент-сервер Интеллектуальные события. Интеллектуальный суверенитет России
Интеллектуальные события. Интеллектуальный суверенитет России Структуры данных: динамический массив, стек, очередь, дек, бинарная куча
Структуры данных: динамический массив, стек, очередь, дек, бинарная куча Интернет-предпринимательство. Ценностное предложение
Интернет-предпринимательство. Ценностное предложение Мастер-класс Эффективное продвижение своего бизнеса в социальных сетях
Мастер-класс Эффективное продвижение своего бизнеса в социальных сетях Электронная почта
Электронная почта Компьютер - универсальная машина для работы с информацией. Техника безопасности и организация рабочего места
Компьютер - универсальная машина для работы с информацией. Техника безопасности и организация рабочего места Проблемы применения информационных технологий в сельском хозяйстве
Проблемы применения информационных технологий в сельском хозяйстве Анализ затрат на информационное обеспечение деятельности компании
Анализ затрат на информационное обеспечение деятельности компании Нечеткая логика
Нечеткая логика Use native methods judiciously. (Item 54,55,56)
Use native methods judiciously. (Item 54,55,56) Игра по информатике Умники и умницы
Игра по информатике Умники и умницы Виды информации (1)
Виды информации (1) Системы реального времени
Системы реального времени Презентация Весна.
Презентация Весна. Кейсы и антикейсы: SEO для новых рынков - как продвигаться, если выдача и конкуренция меняется каждый день
Кейсы и антикейсы: SEO для новых рынков - как продвигаться, если выдача и конкуренция меняется каждый день Система управления базами данных. Моделирование и формализация
Система управления базами данных. Моделирование и формализация Основы журналистики. Понятие Интернет - СМИ
Основы журналистики. Понятие Интернет - СМИ Компьютерная анимация объектов
Компьютерная анимация объектов Программы-утилиты
Программы-утилиты Локальные вычислительные сети
Локальные вычислительные сети Операционные системы. Управление процессами
Операционные системы. Управление процессами Сложная анимация. lesson 11
Сложная анимация. lesson 11 Объектно-ориентированные базы данных
Объектно-ориентированные базы данных Розпізнавання. Загальні алгоритми навчання
Розпізнавання. Загальні алгоритми навчання Разработка КИМ с помощью специализированной онлайн-платформы LearningApps.org., для оценки предметных результатов
Разработка КИМ с помощью специализированной онлайн-платформы LearningApps.org., для оценки предметных результатов