- Соревнование Лабиринт

Содержание
- 2. Задача робота: Двигаясь внутри лабиринта, за время не более 3 минут, добраться из зоны старта в
- 3. Требования к роботу Длина – не более 25 см; Ширина – не более 25 см; Высота
- 4. Для нахождения выхода из лабиринта применяют правило правой (левой) руки: Если двигаться по лабиринту, держась рукой
- 5. Робот ТРИК, датчики расстояния подключены к портам 1 и 2. Модель робота – 2D модель Для
- 6. Для оптимизации программного кода, сначала не будем составлять полную диаграмму, а создадим три подпрограммы: «Вперед», «Направо»
- 7. Главная программа будет выглядеть так:
- 9. Скачать презентацию
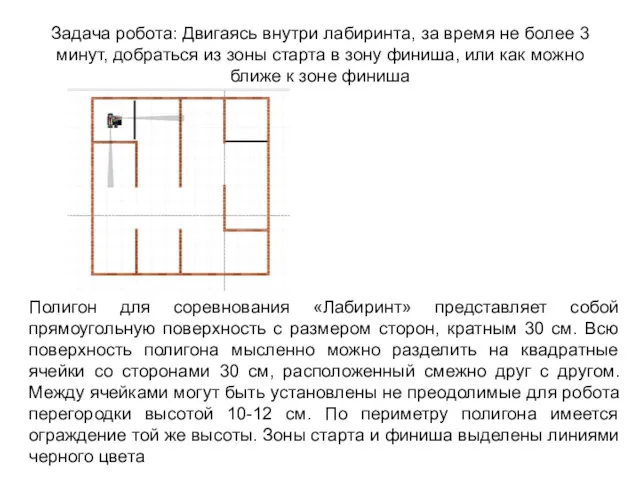
Задача робота: Двигаясь внутри лабиринта, за время не более 3 минут,
Задача робота: Двигаясь внутри лабиринта, за время не более 3 минут,
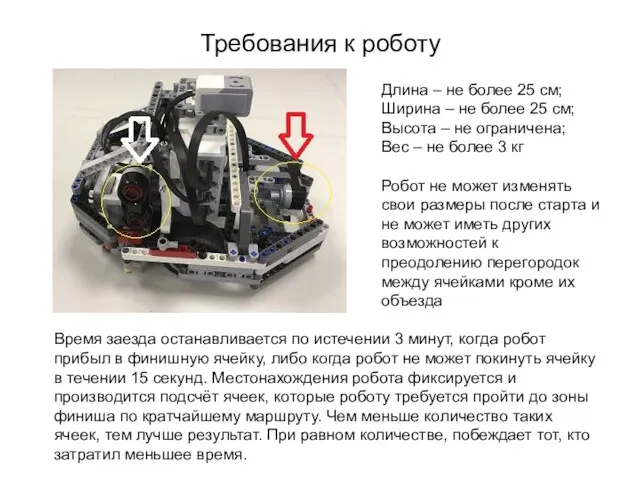
Требования к роботу
Длина – не более 25 см;
Ширина – не более
Требования к роботу
Длина – не более 25 см;
Ширина – не более
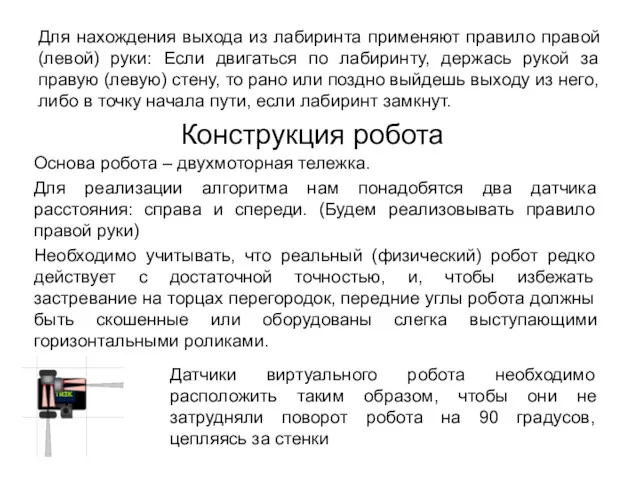
Для нахождения выхода из лабиринта применяют правило правой (левой) руки: Если
Для нахождения выхода из лабиринта применяют правило правой (левой) руки: Если
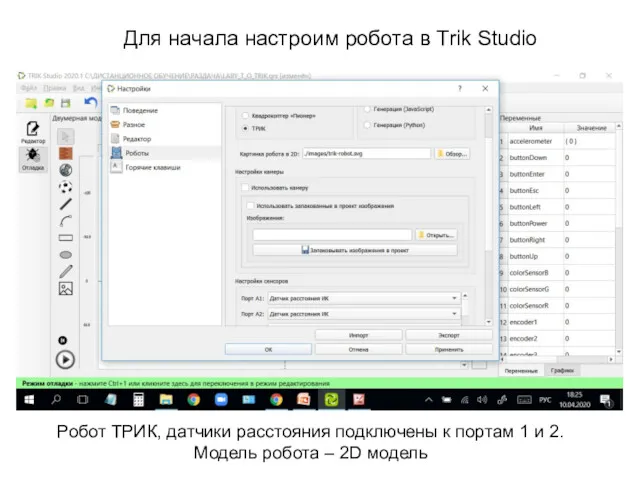
Робот ТРИК, датчики расстояния подключены к портам 1 и 2. Модель
Робот ТРИК, датчики расстояния подключены к портам 1 и 2. Модель
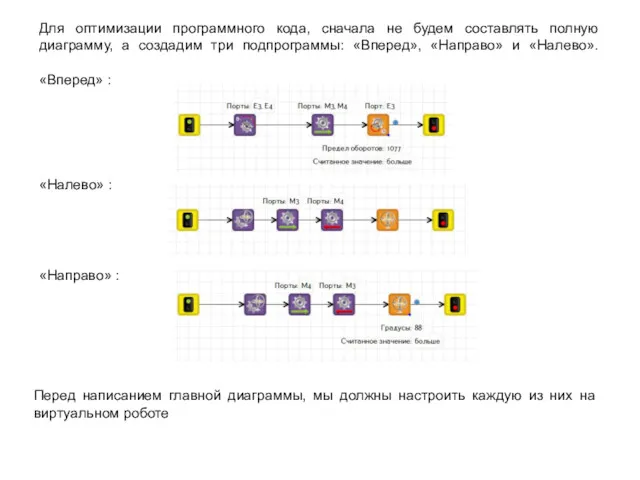
Для оптимизации программного кода, сначала не будем составлять полную диаграмму, а
Для оптимизации программного кода, сначала не будем составлять полную диаграмму, а
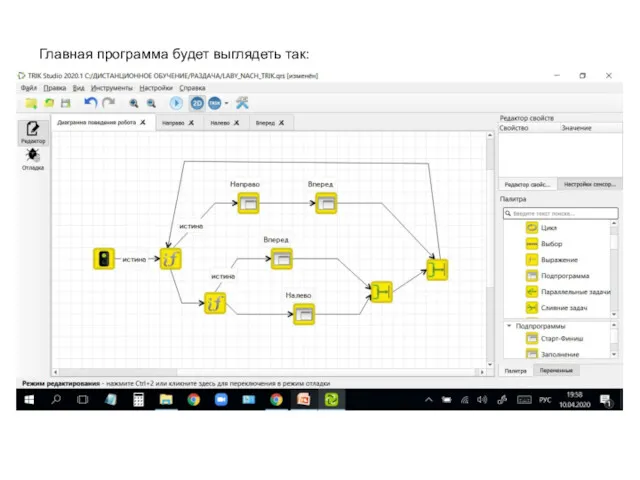
Главная программа будет выглядеть так:
Главная программа будет выглядеть так:
 Социальная инженерия
Социальная инженерия Использование эффекта Доплера
Использование эффекта Доплера Методика решения заданий ЕГЭ по информатике высокого уровня сложности (В15)
Методика решения заданий ЕГЭ по информатике высокого уровня сложности (В15) Алгоритмы обработки массивов
Алгоритмы обработки массивов Классификация компьютеров
Классификация компьютеров Моделирование, формализация, визуализация
Моделирование, формализация, визуализация Табличные процессоры как средство обработки деловой информации
Табличные процессоры как средство обработки деловой информации Компьютерные сети. Глобальная компьютерная сеть интернет
Компьютерные сети. Глобальная компьютерная сеть интернет Методология научно-исследовательских и опытно-конструкторских работ. Термины и определения. (Лекция 1)
Методология научно-исследовательских и опытно-конструкторских работ. Термины и определения. (Лекция 1) Теория информации
Теория информации Mac OS — семейство операционных систем производства корпорации Apple
Mac OS — семейство операционных систем производства корпорации Apple Доклад-презентация к уроку проектной деятельности 10-11 классов на тему Вклад Стива Джобса в науку Диск
Доклад-презентация к уроку проектной деятельности 10-11 классов на тему Вклад Стива Джобса в науку Диск Виды базы данных
Виды базы данных Информационная технология: предмет, цель, задачи, состав компонентов. Лекция 2
Информационная технология: предмет, цель, задачи, состав компонентов. Лекция 2 Устройства ввода информации
Устройства ввода информации Вспомогательные алгоритмы и подпрограммы. Функции
Вспомогательные алгоритмы и подпрограммы. Функции Электронная подпись. Лекция №6
Электронная подпись. Лекция №6 Компетентностный подход как фактор модернизации общего образования
Компетентностный подход как фактор модернизации общего образования Модель вариантов использования в Rose. (Тема 4)
Модель вариантов использования в Rose. (Тема 4) Жанр и критерии отбора новостей
Жанр и критерии отбора новостей Основы работы в SolidWorks
Основы работы в SolidWorks Массивы.
Массивы. Поняття про об’єкт у програмуванні. Властивості об’єкта
Поняття про об’єкт у програмуванні. Властивості об’єкта Этапы подготовки презентации
Этапы подготовки презентации Співпраця в мережі
Співпраця в мережі Информационно - поисковые системы
Информационно - поисковые системы Применение технологий интернета вещей в сфере образования. Информационная безопасность интернета вещей
Применение технологий интернета вещей в сфере образования. Информационная безопасность интернета вещей Travel-блоги известных путешественников для вдохновения
Travel-блоги известных путешественников для вдохновения