- Технічні і програмні засоби КС реального часу. (Тема 10)

Содержание
- 2. ПЛАН: Особливості і етапи розвитку КС АСУ ТП. 2. Архітектура сучасних КС АСУ ТП. 3. Датчики
- 3. 1. ОСОБЛИВОСТІ І ЕТАПИ РОЗВИТКУ КС АСУ ТП.
- 4. Особливості КС АСУ ТП - До комп'ютерних систем реального часу АСУ ТП пред'являються підвищені вимоги по
- 5. Потрібне підключення великого числа датчиків, територіальне віддалення від центру контролю і управління Інтерфейси таких систем повинні
- 6. Підсистема зв'язку оператора-технолога Важливу роль в системах для АСУ ТП грає підсистема зв'язку оператора-технолога з контрольованим
- 7. Етапи розвитку КС АСУ ТП. На першому етапі автоматизовані системи управління технологічними процесами (АСУТП) будувалися на
- 8. Промислові комп'ютери в АСУ ТП З середини 90-х років в системах управління поступово стала проявлятися тенденція
- 9. Programmable Logic Controller- PLC Поява мікропроцесорів поклала початок ери програмованих логічних контролерів - ПЛК (Programmable Logic
- 10. Remote Terminal Unit Одна зі сфер застосування PLC - системи телемеханіки. PLC в цих системах грають
- 11. DCS-системи DCS-системи (Distributed Control System) - розподілені системи управління, адаптовані для управління безперервними технологічними процесами. Це
- 12. PLC У 80-і роки обидва розглянутих вище класи мікропроцесорних систем (на базі PLC і DCS) мали
- 13. 2. АРХІТЕКТУРА СУЧАСНИХ КС АСУ ТП.
- 14. Архітектура сучасних КС АСУ ТП. Велике число сучасних систем контролю та управління має розподілений характер і
- 15. Рисунок 1 - Узагальнена архітектура системи КС АСУ ТП 2. Архітектура сучасних КС АСУ ТП.
- 16. Нижній рівень КС АСУ ТП Нижній рівень - рівень об'єкта (контролерний) - включає різні датчики (вимірювальні
- 17. SCADA-системи. Для розосереджених об'єктів, таких, як нафтові і газові промисли, а також для об'єктів транспорту нафти
- 18. Збір і передача даних Для SCADA-системи найбільш характерним завданням є: збір і передача даних, яка реалізується
- 19. Пакети програм для програмування контролерів Розробка, налагодження та виконання програм контролерами здійснюється за допомогою спеціалізованого програмного
- 20. Апаратно-програмні засоби GE Fanuc. Інформація з локальних контролерів може направлятися в мережу диспетчерського пункту безпосередньо, а
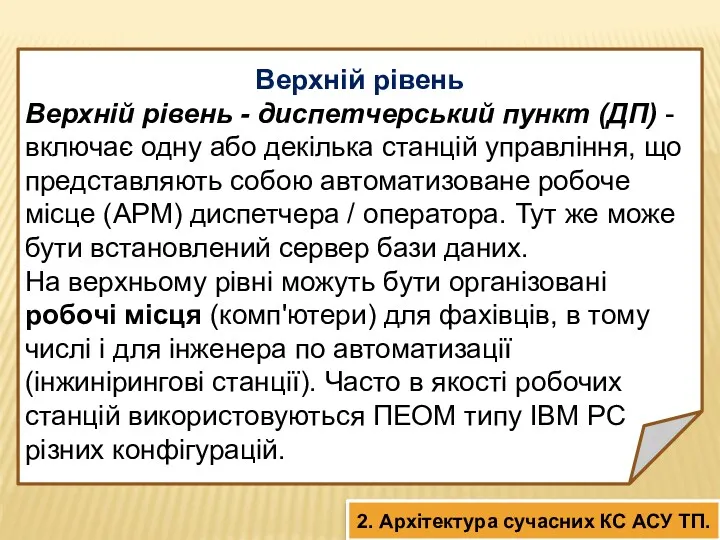
- 21. Верхній рівень Верхній рівень - диспетчерський пункт (ДП) - включає одну або декілька станцій управління, що
- 22. Станції управління призначені для відображення ходу технологічного процесу і оперативного управління. Ці завдання вирішують прикладне програмне
- 23. 3. ДАТЧИКИ І КОНТРОЛЕРИ КС АСУ ТП.
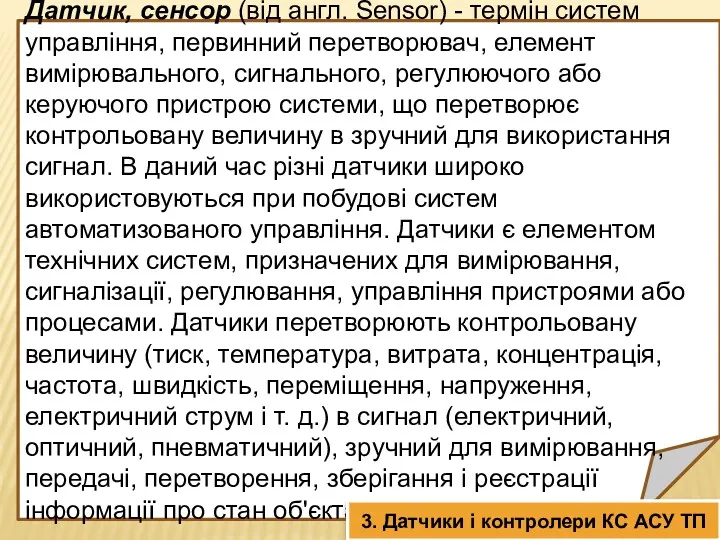
- 24. Датчик, сенсор (від англ. Sensor) - термін систем управління, первинний перетворювач, елемент вимірювального, сигнального, регулюючого або
- 25. Контролери АСУ ТП До параметрів контролерів, що характеризують їх здатність взаємодіяти з іншими пристроями системи управління,
- 26. Рисунок 2 - Узагальнена архітектура системи на базі контролерів GE Fanuc 3. Датчики і контролери КС
- 27. Характеристики контролерів і програмно-технічних комплексів GE Fanuc. Контролери серії 90-30, 90-70 ПЛК серії 90-30 фірми GE
- 28. 3. Датчики і контролери КС АСУ ТП
- 29. Моделі 340/341 351 351 Моделі 340/341 і 351/352 Моделі 340/341 - це ПЛК зі збільшеним об'ємом
- 30. 3. Датчики і контролери КС АСУ ТП
- 31. Контролери VersaMax Устаткування VersaMax може бути використано для побудови невеликих (до 256 точок) локальних систем управління,
- 32. Характеристика контролера VersaMax: пам'ять програм - 12К (12288 байт). швидкість виконання двійкових операцій - 1.8 мс
- 33. VersaMax Система з одним контролером VersaMax (IC200CPU001) підтримує до 256 вводів / виводів. Система VersaMax максимально
- 34. Комунікаційні можливості VersaMax CPU контролера має два послідовних програмно-конфігуруємих порти RS-232 і RS-485 (протоколи - SNP
- 35. Характеристика модуля підтримує максимум 392 біта (від 1 до 244 введення або 244 виведення); адресний простір
- 36. Контролери і модулі зв'язку серії 90-70 В ПЛК (Програмований логічний контролер) серії 90-70 використовується стандарт шини
- 37. Комунікаційні можливості серії 90-70 Мається можливість установки на відстані до 2275 метрів від контролера, а також
- 38. Модулі I/O Link I / O Link - це послідовний інтерфейс, що забезпечує високошвидкісний обмін даними
- 39. Модуль співпроцесора зв'язку Communications Coprocessor Module - ССМ. Підтримує протоколи управління зв'язком (ССМ забезпечує інтерфейси RS232
- 40. Контролер локальної мережі Ethernet Призначений для високоякісного зв'язку між контролерами і для їх інтеграції в мережі
- 41. Контролер локальної мережі Ethernet Мається 2 альтернативних протоколу зв'язку: Програмне забезпечення TCP / IP Ethernet -
- 42. Датчики АСУ ТП Історично і логічно датчики пов'язані з технікою вимірювань і вимірювальними приладами, наприклад термометри,
- 43. Класифікація датчиків Класифікація за видом вихідних величин: активні (генераторні), пасивні (параметричні). Класифікація по вимірюваному параметру: датчики
- 44. Класифікація датчиків Класифікація за рівнем : поплавкові; ємнісні; радарні; ультразвукові; Класифікація за температурою: термопара ; термометр
- 45. Класифікація датчиків Датчик кутового положення : сельсин; перетворювач кут-код; RVDT. Датчик вібрації : датчик п'єзоелектричний ;
- 46. Класифікація датчиків Класифікація за принципом дії :оптичні датчики (фотодатчики); магнітоелектричний датчик (на основі ефекту Холла); п’єзоелектричний
- 47. 4. ПРОГРАМНЕ ЗАБЕЗПЕЧЕННЯ КС АСУ ТП
- 48. Для програмування контролерів GE Fanuc зазвичай використовується мова релейно-контактної логіки. Logicmaster підтримує структуроване написання програм з
- 49. SCADA - система Cimplicity Cimplicity - один із старих HMI - продуктів на світовому ринку. Цей
- 50. Cimplicity надає можливість гарячого резервування, яка забезпечує автоматичне перемикання з первинної системи на вторинну у разі
- 51. 5. МЕРЕЖЕВА АРХІТЕКТУРА І ПРОТОКОЛИ АСУ ТП
- 52. До параметрів контролерів, що характеризують їх здатність взаємодіяти з іншими облаштуваннями системи управління, відносяться: кількість і
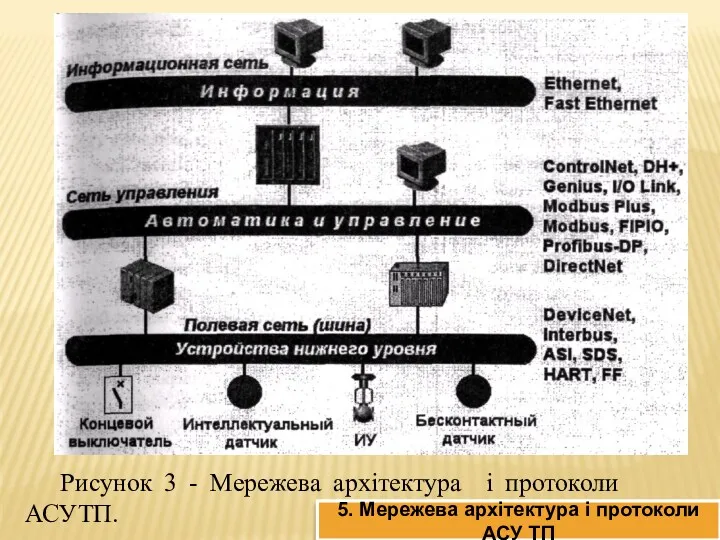
- 53. 5. Мережева архітектура і протоколи АСУ ТП Рисунок 3 - Мережева архітектура і протоколи АСУТП.
- 54. Мережі, інформаційні, що забезпечують, обмін між контролерами, датчиками і виконавчими пристроями, часто об'єднуються під загальною назвою
- 55. До комп'ютерних систем реального часу АСУ ТП пред'являються підвищені вимоги по надійності і продуктивності. Так, час
- 56. Велике число сучасних систем контролю і управління має розподілений характер і має ієрархічну структуру. Для розосереджених
- 58. Скачать презентацию
ПЛАН:
Особливості і етапи розвитку КС АСУ ТП.
2. Архітектура сучасних КС
ПЛАН:
Особливості і етапи розвитку КС АСУ ТП.
2. Архітектура сучасних КС
1. ОСОБЛИВОСТІ І ЕТАПИ РОЗВИТКУ КС АСУ ТП.
1. ОСОБЛИВОСТІ І ЕТАПИ РОЗВИТКУ КС АСУ ТП.
Особливості КС АСУ ТП
- До комп'ютерних систем реального часу АСУ ТП
Особливості КС АСУ ТП
- До комп'ютерних систем реального часу АСУ ТП
Потрібне підключення великого числа датчиків, територіальне віддалення від центру контролю і
Потрібне підключення великого числа датчиків, територіальне віддалення від центру контролю і
Підсистема зв'язку оператора-технолога
Важливу роль в системах для АСУ ТП грає
Важливу роль в системах для АСУ ТП грає

Етапи розвитку КС АСУ ТП.
На першому етапі автоматизовані системи
Етапи розвитку КС АСУ ТП.
На першому етапі автоматизовані системи
Промислові комп'ютери в АСУ ТП
З середини 90-х років в системах
Промислові комп'ютери в АСУ ТП
З середини 90-х років в системах

Programmable Logic Controller- PLC
Поява мікропроцесорів поклала початок ери програмованих логічних контролерів
Programmable Logic Controller- PLC
Поява мікропроцесорів поклала початок ери програмованих логічних контролерів
Remote Terminal Unit
Одна зі сфер застосування PLC - системи телемеханіки.
Remote Terminal Unit
Одна зі сфер застосування PLC - системи телемеханіки.
DCS-системи
DCS-системи (Distributed Control System) - розподілені системи управління, адаптовані для
DCS-системи
DCS-системи (Distributed Control System) - розподілені системи управління, адаптовані для
PLC
У 80-і роки обидва розглянутих вище класи мікропроцесорних систем (на
PLC
У 80-і роки обидва розглянутих вище класи мікропроцесорних систем (на
2. АРХІТЕКТУРА СУЧАСНИХ КС АСУ ТП.
2. АРХІТЕКТУРА СУЧАСНИХ КС АСУ ТП.
Архітектура сучасних КС АСУ ТП.
Велике число сучасних систем контролю та
Велике число сучасних систем контролю та
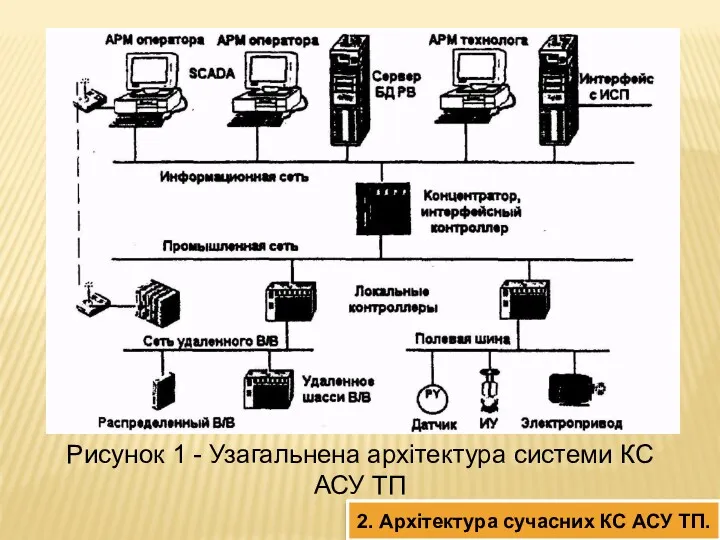
Рисунок 1 - Узагальнена архітектура системи КС АСУ ТП
2. Архітектура сучасних
Рисунок 1 - Узагальнена архітектура системи КС АСУ ТП
2. Архітектура сучасних
Нижній рівень КС АСУ ТП
Нижній рівень - рівень об'єкта (контролерний)
Нижній рівень - рівень об'єкта (контролерний)
SCADA-системи.
Для розосереджених об'єктів, таких, як нафтові і газові промисли, а
Для розосереджених об'єктів, таких, як нафтові і газові промисли, а

Збір і передача даних
Для SCADA-системи найбільш характерним завданням є:
збір і
Для SCADA-системи найбільш характерним завданням є:
збір і
Пакети програм для програмування контролерів
Розробка, налагодження та виконання програм контролерами
Розробка, налагодження та виконання програм контролерами
Апаратно-програмні засоби GE Fanuc.
Інформація з локальних контролерів може направлятися в мережу
Інформація з локальних контролерів може направлятися в мережу
Верхній рівень
Верхній рівень - диспетчерський пункт (ДП) - включає одну
Верхній рівень - диспетчерський пункт (ДП) - включає одну

Станції управління призначені для відображення ходу технологічного процесу і оперативного управління.
3. ДАТЧИКИ І КОНТРОЛЕРИ КС АСУ ТП.
3. ДАТЧИКИ І КОНТРОЛЕРИ КС АСУ ТП.
Датчик, сенсор (від англ. Sensor) - термін систем управління, первинний перетворювач,

Контролери АСУ ТП
До параметрів контролерів, що характеризують їх здатність взаємодіяти
До параметрів контролерів, що характеризують їх здатність взаємодіяти
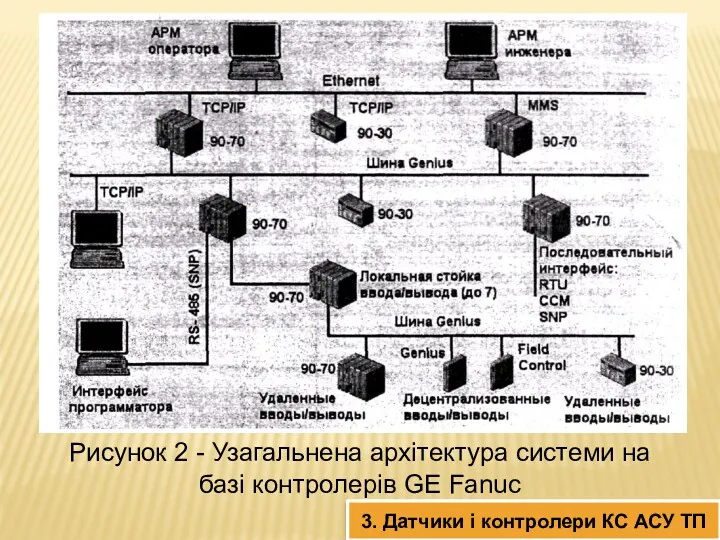
Рисунок 2 - Узагальнена архітектура системи на базі контролерів GE Fanuc
Рисунок 2 - Узагальнена архітектура системи на базі контролерів GE Fanuc
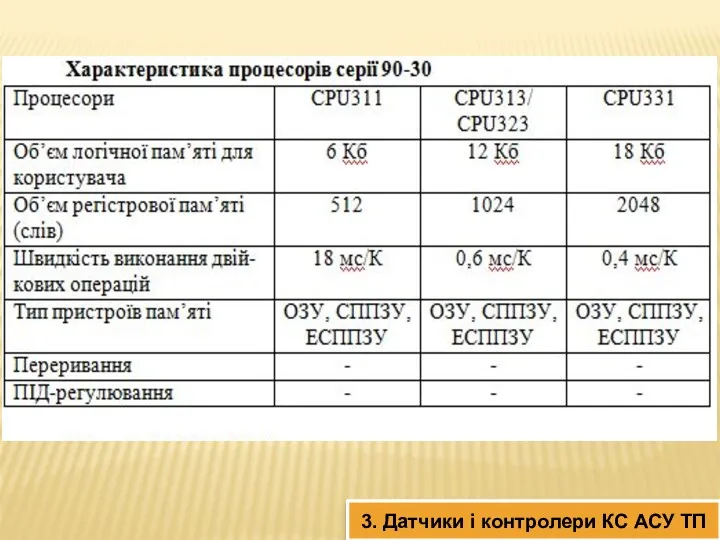
Характеристики контролерів і програмно-технічних комплексів GE Fanuc.
Контролери серії 90-30, 90-70
ПЛК
Контролери серії 90-30, 90-70
ПЛК
3. Датчики і контролери КС АСУ ТП
3. Датчики і контролери КС АСУ ТП

Моделі 340/341 351 351
Моделі 340/341 і 351/352 Моделі 340/341 - це
Моделі 340/341 і 351/352 Моделі 340/341 - це

3. Датчики і контролери КС АСУ ТП
3. Датчики і контролери КС АСУ ТП
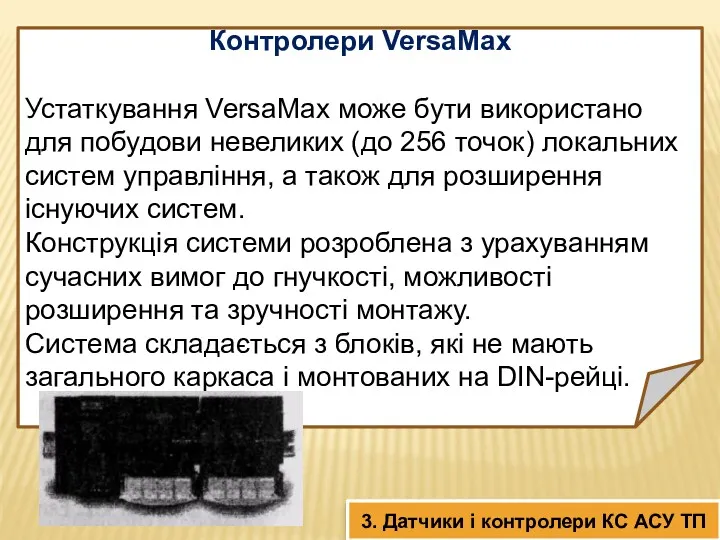
Контролери VersaMax
Устаткування VersaMax може бути використано для побудови невеликих (до
Устаткування VersaMax може бути використано для побудови невеликих (до
Характеристика контролера VersaMax:
пам'ять програм - 12К (12288 байт).
швидкість виконання двійкових
пам'ять програм - 12К (12288 байт).
швидкість виконання двійкових

VersaMax
Система з одним контролером VersaMax (IC200CPU001) підтримує до 256 вводів
Система з одним контролером VersaMax (IC200CPU001) підтримує до 256 вводів

Комунікаційні можливості VersaMax
CPU контролера має два послідовних програмно-конфігуруємих порти RS-232
CPU контролера має два послідовних програмно-конфігуруємих порти RS-232
Характеристика модуля
підтримує максимум 392 біта (від 1 до 244 введення або
підтримує максимум 392 біта (від 1 до 244 введення або
Контролери і модулі зв'язку серії 90-70
В ПЛК (Програмований логічний контролер)
В ПЛК (Програмований логічний контролер)

Комунікаційні можливості серії 90-70
Мається можливість установки на відстані до 2275 метрів
Мається можливість установки на відстані до 2275 метрів

Модулі I/O Link
I / O Link - це послідовний інтерфейс,
I / O Link - це послідовний інтерфейс,
Модуль співпроцесора зв'язку
Communications Coprocessor Module - ССМ. Підтримує протоколи управління
Communications Coprocessor Module - ССМ. Підтримує протоколи управління

Контролер локальної мережі Ethernet
Призначений для високоякісного зв'язку між контролерами і
Призначений для високоякісного зв'язку між контролерами і
Контролер локальної мережі Ethernet
Мається 2 альтернативних протоколу зв'язку:
Програмне забезпечення TCP
Мається 2 альтернативних протоколу зв'язку:
Програмне забезпечення TCP
Датчики АСУ ТП
Історично і логічно датчики пов'язані з технікою
Історично і логічно датчики пов'язані з технікою
Класифікація датчиків
Класифікація за видом вихідних величин: активні (генераторні), пасивні (параметричні).
Класифікація
Класифікація за видом вихідних величин: активні (генераторні), пасивні (параметричні).
Класифікація
Класифікація датчиків
Класифікація за рівнем : поплавкові; ємнісні; радарні; ультразвукові;
Класифікація за
Класифікація за рівнем : поплавкові; ємнісні; радарні; ультразвукові;
Класифікація за
Класифікація датчиків
Датчик кутового положення : сельсин; перетворювач кут-код; RVDT.
Датчик вібрації
Датчик кутового положення : сельсин; перетворювач кут-код; RVDT.
Датчик вібрації
Класифікація датчиків
Класифікація за принципом дії :оптичні датчики (фотодатчики); магнітоелектричний датчик
Класифікація за принципом дії :оптичні датчики (фотодатчики); магнітоелектричний датчик
4. ПРОГРАМНЕ ЗАБЕЗПЕЧЕННЯ
КС АСУ ТП
4. ПРОГРАМНЕ ЗАБЕЗПЕЧЕННЯ
КС АСУ ТП
Для програмування контролерів GE Fanuc зазвичай використовується мова релейно-контактної логіки. Logicmaster
SCADA - система Cimplicity
Cimplicity - один із старих HMI -
Cimplicity - один із старих HMI -
Cimplicity надає можливість гарячого резервування, яка забезпечує автоматичне перемикання з первинної

5. МЕРЕЖЕВА АРХІТЕКТУРА І ПРОТОКОЛИ АСУ ТП
5. МЕРЕЖЕВА АРХІТЕКТУРА І ПРОТОКОЛИ АСУ ТП

До параметрів контролерів, що характеризують їх здатність взаємодіяти з іншими облаштуваннями
5. Мережева архітектура і протоколи АСУ ТП
Рисунок 3 - Мережева архітектура
5. Мережева архітектура і протоколи АСУ ТП
Рисунок 3 - Мережева архітектура
Мережі, інформаційні, що забезпечують, обмін між контролерами, датчиками і виконавчими
Мережі, інформаційні, що забезпечують, обмін між контролерами, датчиками і виконавчими
До комп'ютерних систем реального часу АСУ ТП пред'являються підвищені вимоги
До комп'ютерних систем реального часу АСУ ТП пред'являються підвищені вимоги
Велике число сучасних систем контролю і управління має розподілений характер
Велике число сучасних систем контролю і управління має розподілений характер
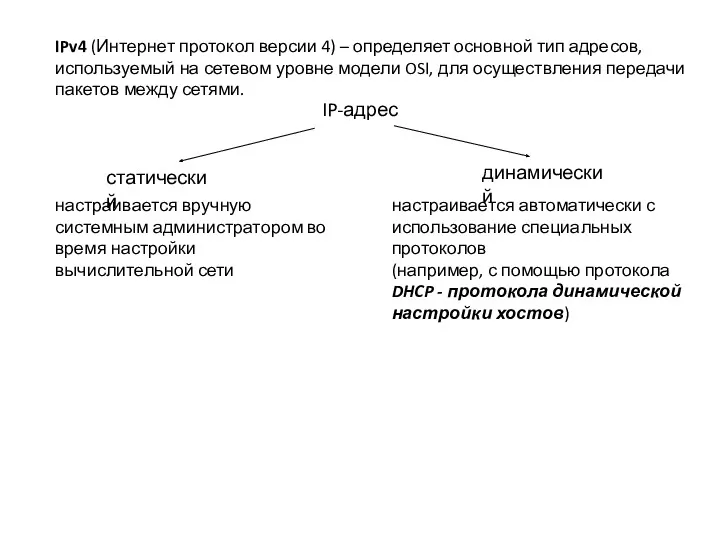 Формат пакета IP (TTL)
Формат пакета IP (TTL) Онтологии. Теория и примеры
Онтологии. Теория и примеры Планирование имитационных экспериментов
Планирование имитационных экспериментов Счастливый случай по информатике 9 класс
Счастливый случай по информатике 9 класс Виртуальные машины. Удаленные рабочие столы. Специализированное программное обеспечение, применяемое в процессе тестирования
Виртуальные машины. Удаленные рабочие столы. Специализированное программное обеспечение, применяемое в процессе тестирования Проектирование физического и канального уровней локальной вычислительной сети предприятия по проектированию и разработке ПО
Проектирование физического и канального уровней локальной вычислительной сети предприятия по проектированию и разработке ПО Исполнители вокруг нас
Исполнители вокруг нас Microsoft word-бұл құжаттарды құру, қарап шығу, өзгерту және басып шығару үшін арналған Microsoft Office
Microsoft word-бұл құжаттарды құру, қарап шығу, өзгерту және басып шығару үшін арналған Microsoft Office Преобразование логических выражений. Элементы теории множеств и алгебры логики
Преобразование логических выражений. Элементы теории множеств и алгебры логики The process model
The process model Тестирование вёрстки нового сайта ААА моторс
Тестирование вёрстки нового сайта ААА моторс Презентации по теме Архитектура ПК.
Презентации по теме Архитектура ПК. Разработка информационной системы кадастрового учета
Разработка информационной системы кадастрового учета Базовые понятия в программировании
Базовые понятия в программировании Социальные сети
Социальные сети Реляционная база данных. Bigdata. Основные понятия базы данных
Реляционная база данных. Bigdata. Основные понятия базы данных Информационная система
Информационная система Методы решения логических задач
Методы решения логических задач Петербургский научно-практический журнал Дошкольная педагогика
Петербургский научно-практический журнал Дошкольная педагогика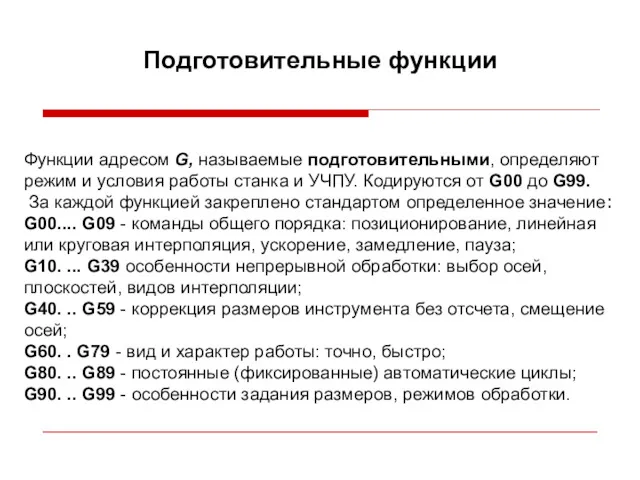 Подготовительные функции (04)
Подготовительные функции (04) Сапр AutoCAD - основные понятия и приемы работы
Сапр AutoCAD - основные понятия и приемы работы Your First Android Project!
Your First Android Project! Аутентификация при локальном доступе. Лекция 4
Аутентификация при локальном доступе. Лекция 4 Программирование на языке С++
Программирование на языке С++ Упрощенный приём РПО: приём за 30 секунд, предзаполненные и предоплаченные посылки
Упрощенный приём РПО: приём за 30 секунд, предзаполненные и предоплаченные посылки Добро пожаловать в мотивационую программу территориальных управляющих
Добро пожаловать в мотивационую программу территориальных управляющих Мобильные приложения для обучения
Мобильные приложения для обучения Информатика и информационные технологии в профессиональной деятельности. Угрозы информационной безопасности
Информатика и информационные технологии в профессиональной деятельности. Угрозы информационной безопасности