- Визуальные алгоритмы SLAM

Содержание
- 2. О задаче SLAM
- 3. SLAM SLAM (Simultaneous Localization and Mapping) – методы одновременной локализации и построения карты.
- 4. В чём же разница SLAM и Визуальной одометрии Конечно можно сказать, что в наличие карты, но
- 5. О плотности карт Почти все визуальные алгоритмы SLAM используют точечную карты. Неплотная точечная (Sparse) карта –
- 6. Плотная точечная (Dense) карта – точки добавляются по максимуму. Есть ещё полуплотные (Semi Dense). О плотности
- 7. Прямой/косвенный метод Косвенные методы (Indirect) – Проходят в два этапа. Во-первых, происходит предварительная обработка данных для
- 8. Прямой/косвенный метод
- 9. Комбинации подходов Sparse + Indirect: (Не плотные + не прямые) – Используем ключевые точки и их
- 10. Разделение по камерам
- 11. RTAB-Map RTAB-Map (Real-Time Appearance-Based Mapping) – визуальный алгоритм SLAM на основе графа для RGB-D камер. Использует
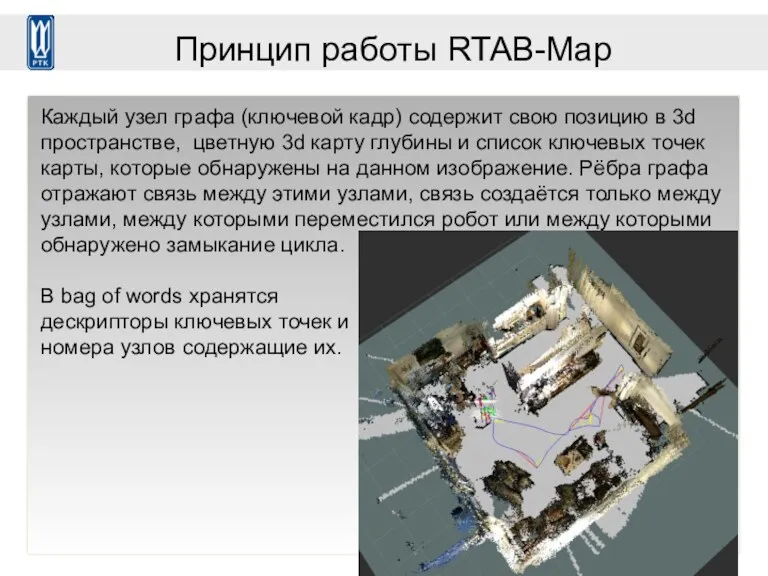
- 12. Принцип работы RTAB-Map Каждый узел графа (ключевой кадр) содержит свою позицию в 3d пространстве, цветную 3d
- 13. Принцип работы RTAB-Map 1) Первый кадр становится ключевым. Его карта глубины добавляется на 3D кадр. А
- 14. Фишки RTAB-Map 1) Большое количество дескрипторов и детекторов точек: 0=SURF 1=SIFT 2=ORB 3=FAST/FREAK 4=FAST/BRIEF 5=GFTT/FREAK 6=GFTT/BRIEF
- 15. Фишки RTAB-Map
- 16. Не забудь скачать видосик с рабочего компа Пример работы RTAB-Map
- 17. ORB-SLAM ORB-SLAM (Oriented FAST and Rotated BRIEF SLAM)– визуальный алгоритм SLAM для моно-камер использующая детектор и
- 18. Принцип работы ORB-SLAM
- 19. Принцип работы ORB-SLAM
- 20. Covisibility Graph и Essential Graph Covisibility Graph (граф взаимной видимости) - Каждый узел представляет собой ключевой
- 21. Шаг 0: Инициализация 1.1 Автоматическая инициализация карты Целью инициализации карты является вычисление относительную позицию между двумя
- 22. Шаг 0: Инициализация Ищем с помощью RANSAC по 8 точкам для фундаментальной матрицы и по 4
- 23. (4) На основе полученной модели вычисляем гипотезы движения. Для проективного преобразование триангулируем все 8 гипотез и
- 24. Bundle adjustment, чтобы не спрашивали А ещё есть страшное приложение Получается, что нам нужно подобрать внешние
- 25. Принцип работы ORB-SLAM
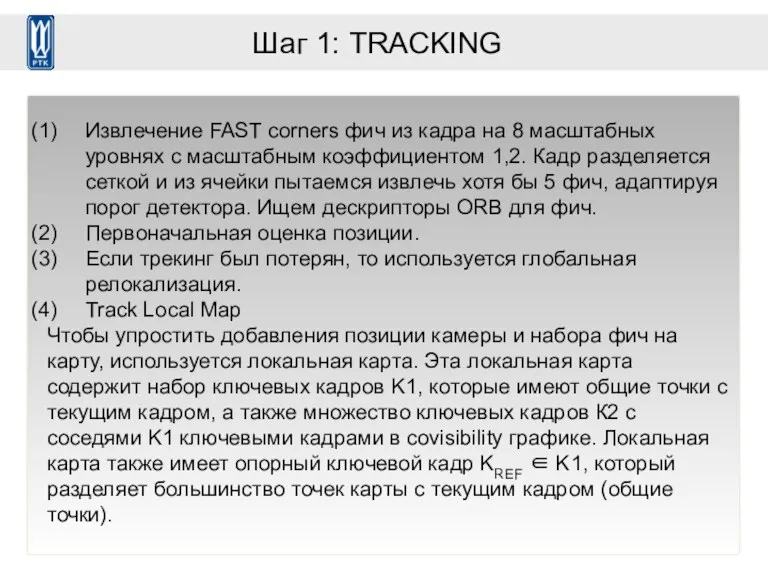
- 26. Шаг 1: TRACKING Извлечение FAST corners фич из кадра на 8 масштабных уровнях с масштабным коэффициентом
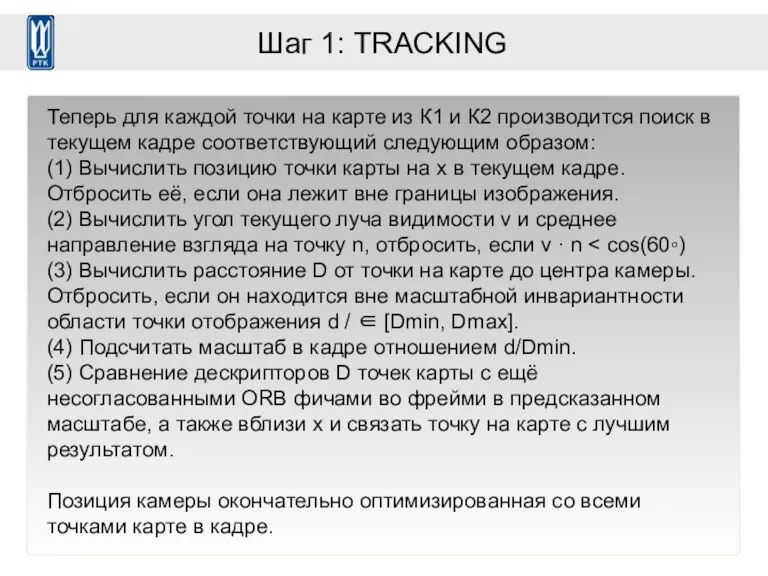
- 27. Теперь для каждой точки на карте из К1 и К2 производится поиск в текущем кадре соответствующий
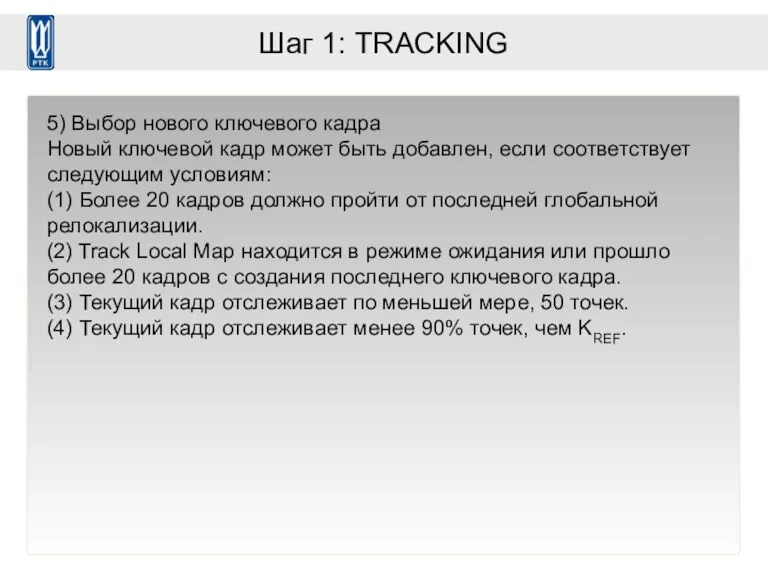
- 28. Шаг 1: TRACKING 5) Выбор нового ключевого кадра Новый ключевой кадр может быть добавлен, если соответствует
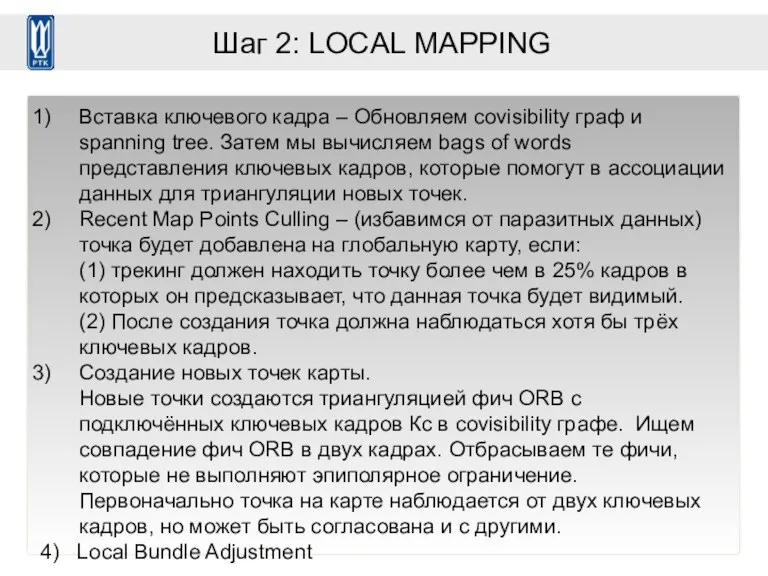
- 29. Шаг 2: LOCAL MAPPING Вставка ключевого кадра – Обновляем covisibility граф и spanning tree. Затем мы
- 30. Принцип работы ORB-SLAM
- 31. Шаг 3: LOOP CLOSING 1) Детектор кандидатов для закрытия цикла Сначала мы вычислим сходство между bag
- 32. Шаг 3: LOOP CLOSING 3) Loop Fusion Объединили повторяющиеся точки и вставили новые рёбра в covisibility
- 33. Решил не писать сюда функции оптимизации, но ежели вы хотите То можем и их посмотреть Используемые
- 34. Пример работы ORB SLAM Видосик не вставился. Свернуть и показать. Файл orb.ogv
- 35. LSD – SLAM LSD-SLAM (Large-scale direct monocular SLAM) – произошёл от метода SVO(Semi-Direct Monocular Visual Odometry).
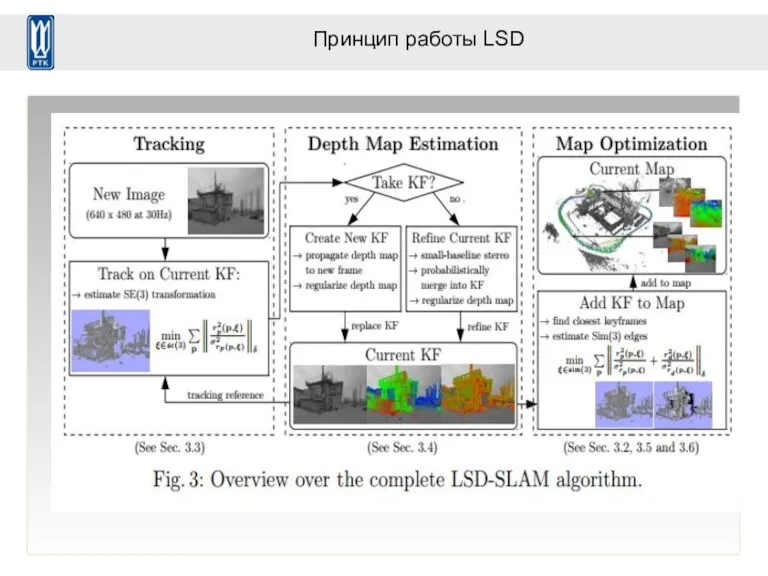
- 36. Принцип работы LSD
- 37. Немного алгебры ли и обозначений для LSD Используется алгебра Ли 1) 3D трансформация твёрдого тела G∈
- 38. Немного алгебры ли и обозначений для LSD Операция контенация двух объектов: se(3) × se(3) → se(3)
- 39. Взвешенная оптимиизация Гаусса-Ньютона на Ли многообразиях Два изображения считаются выравненными Гауссо-Ньютоновской оптимизацией по фотометрической ошибки при
- 40. где J является производной от слаженного остаточного вектора r = (r1, . . . , rn)
- 41. Чтобы избавится от выбросов возникающих, например, при преграждение видимости камеры или отражения используется взвещённая схема. В
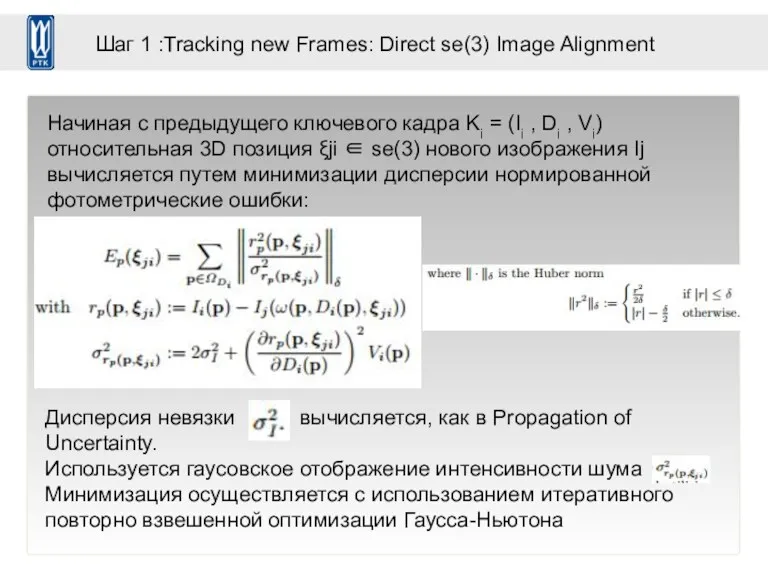
- 42. Propagation of Uncertainty Распространение неопределенности представляет собой статистический инструмент для получения неопределенности выходе функции f(X), из-за
- 43. Принцип работы LSD
- 44. Представление карты Карта представлена в виде графа позиций ключевых кадров. Каждый ключевой кадр Ki состоит из:
- 45. Шаг 0: Инициализация Достаточно инициализировать случайную карту глубины с большой дисперсией. Несколько первых ключевых кадров сведут
- 46. Шаг 1 :Tracking new Frames: Direct se(3) Image Alignment Начиная с предыдущего ключевого кадра Ki =
- 47. Шаг 2: Depth Map Estimation Выбор ключевого кадра. Если камера перемещается слишком далеко от существующей карты,
- 48. Детализация карты глубины. Отслеживаемые кадры, которые не являются ключевыми используются для уточнения текущего ключевого кадра: Большое
- 49. Принцип работы LSD
- 50. Шаг 3: Constraint Acquisition: Direct sim(3) Image Alignment Direct Image Alignment on sim(3). Для решения проблемы
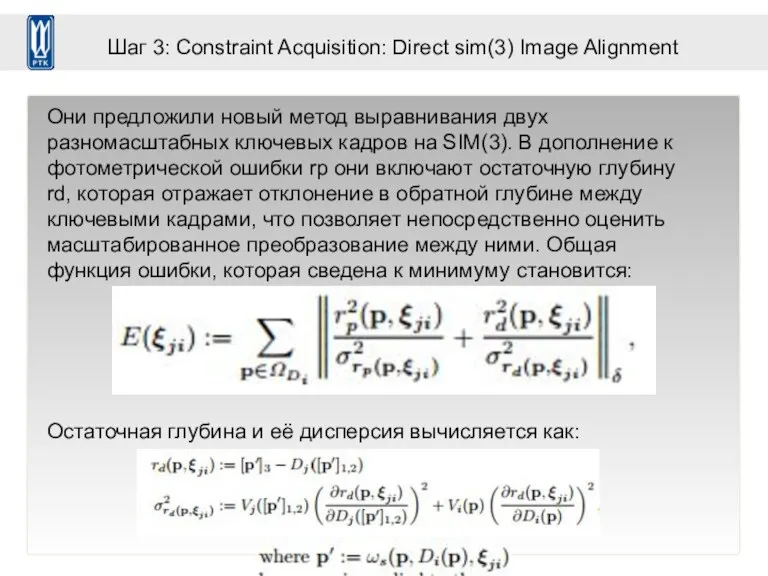
- 51. Шаг 3: Constraint Acquisition: Direct sim(3) Image Alignment Они предложили новый метод выравнивания двух разномасштабных ключевых
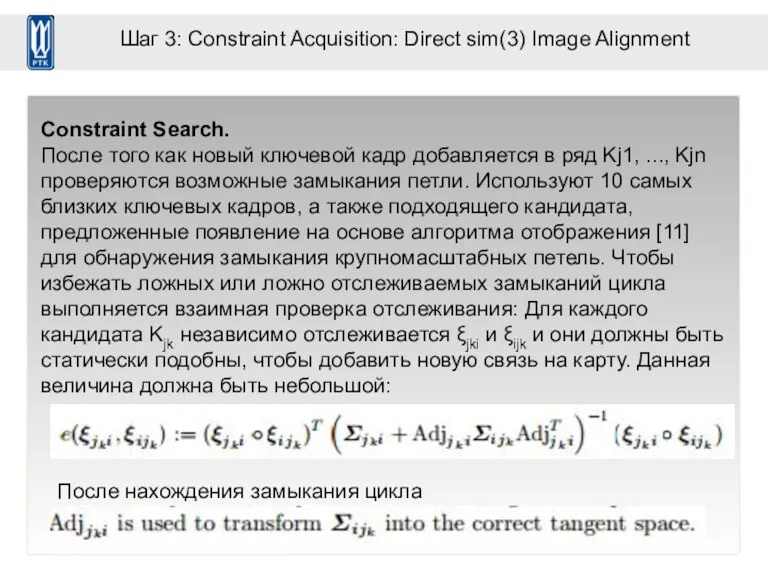
- 52. Шаг 3: Constraint Acquisition: Direct sim(3) Image Alignment Constraint Search. После того как новый ключевой кадр
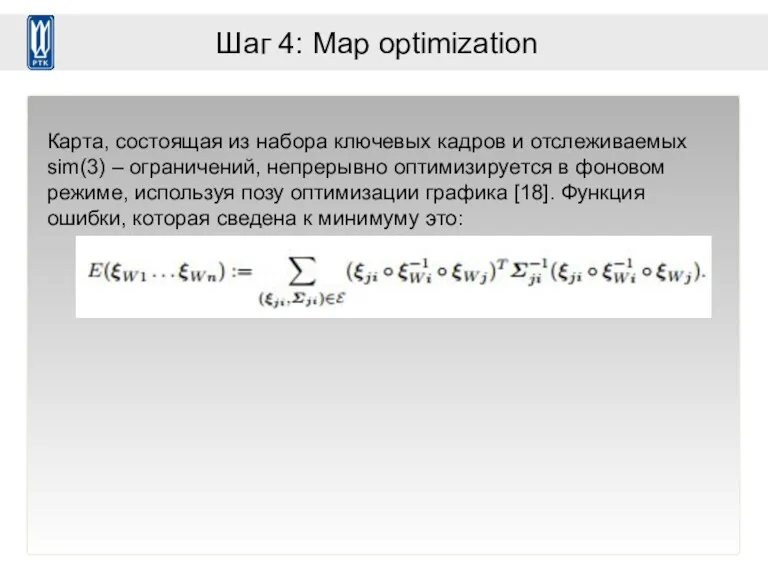
- 53. Шаг 4: Map optimization Карта, состоящая из набора ключевых кадров и отслеживаемых sim(3) – ограничений, непрерывно
- 54. Пример работы LSD Опять не тот формат видосика. Lsd.ogv
- 55. DSO DSO (Direct Sparse Odometry) – алгоритм визуальной одометрии на основе монокамеры. Использует минимизацию фотометрической шибки,
- 56. DSO Не дано мне видио вставлять в презентацию. =(
- 57. Для почитать перед сном RTAB-Map - https://introlab.github.io/rtabmap/ ORB - https://arxiv.org/pdf/1502.00956.pdf LSD - https://www.google.ru/url?sa=t&rct=j&q=&esrc=s&source=web&cd=2&ved=0ahUKEwii66yzsuXQAhWG2CwKHXLzDkoQFggjMAE&url=https%3A%2F%2Fvision.in.tum.de%2F_media%2Fspezial%2Fbib%2Fengel14eccv.pdf&usg=AFQjCNFXD8s5MGfd4IBcRFHaykkdw2TgXg&sig2=D7RQomXpGH6pY7f9o20ZrA&bvm=bv.141320020,d.bGg DSO - https://arxiv.org/pdf/1607.02565.pdf
- 59. Скачать презентацию
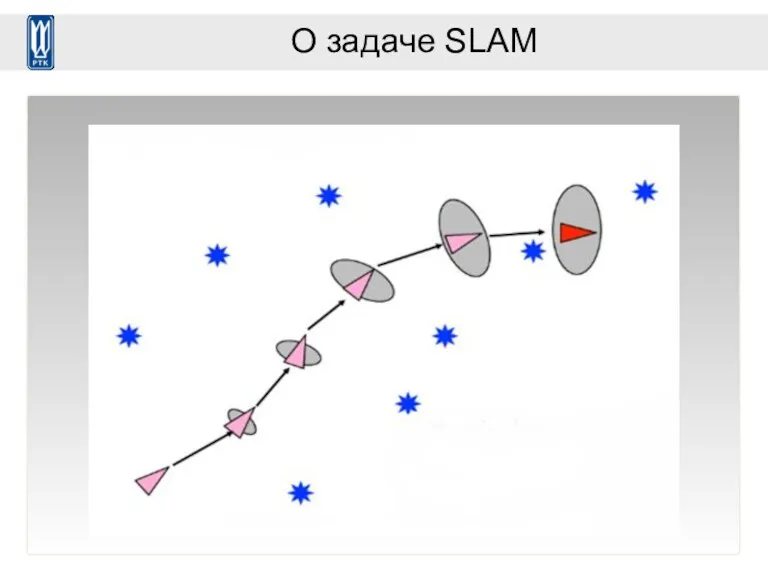
О задаче SLAM
О задаче SLAM
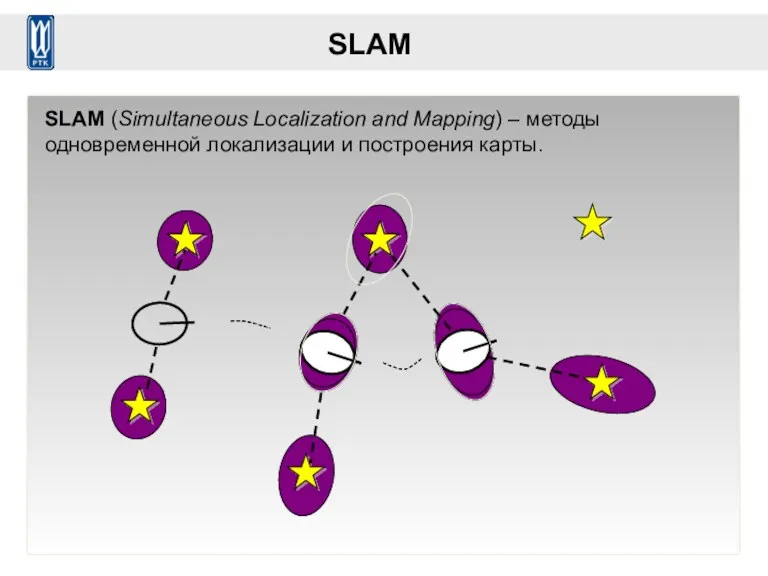
SLAM
SLAM (Simultaneous Localization and Mapping) – методы одновременной локализации и построения
SLAM
SLAM (Simultaneous Localization and Mapping) – методы одновременной локализации и построения
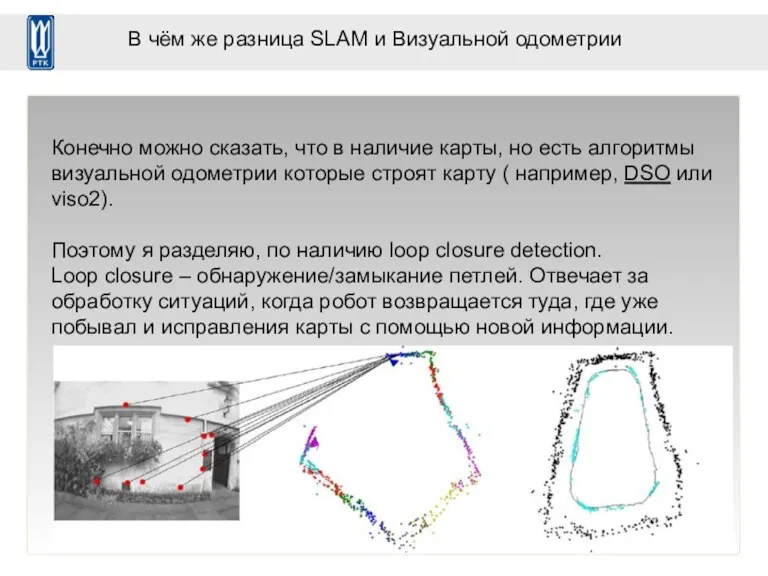
В чём же разница SLAM и Визуальной одометрии
Конечно можно сказать, что
В чём же разница SLAM и Визуальной одометрии
Конечно можно сказать, что
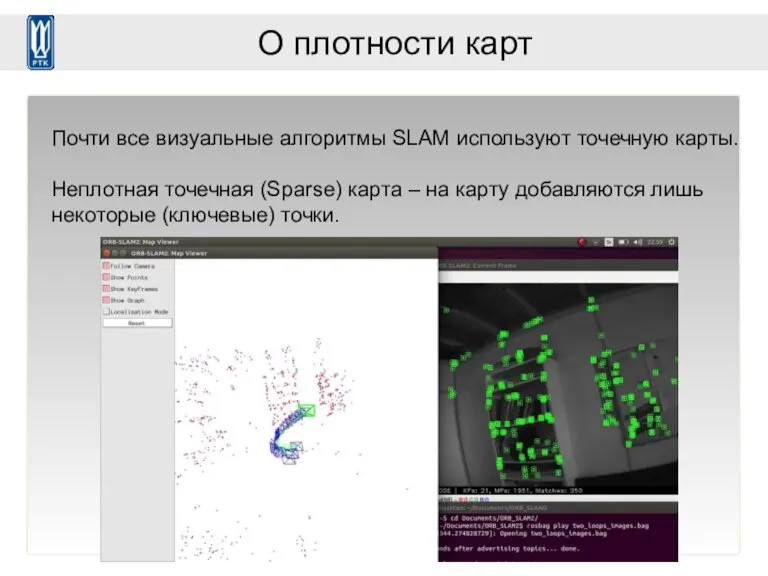
О плотности карт
Почти все визуальные алгоритмы SLAM используют точечную карты.
Неплотная точечная
О плотности карт
Почти все визуальные алгоритмы SLAM используют точечную карты.
Неплотная точечная
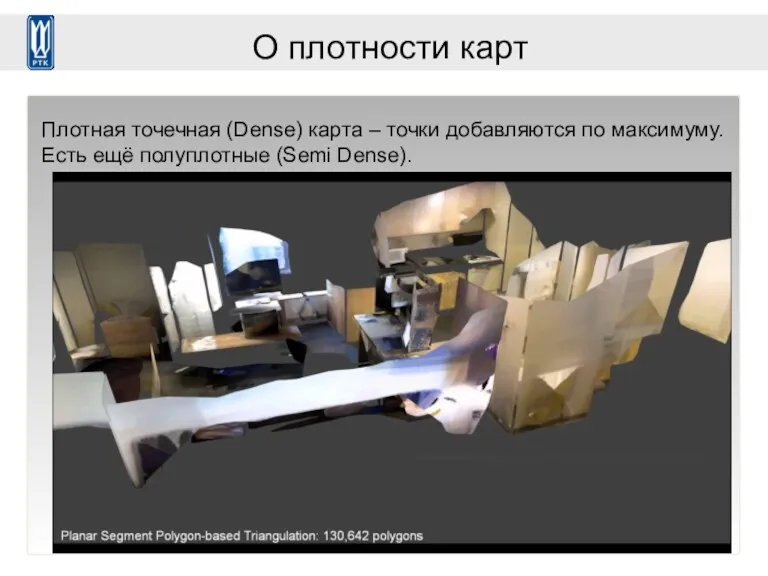
Плотная точечная (Dense) карта – точки добавляются по максимуму.
Есть ещё полуплотные
Плотная точечная (Dense) карта – точки добавляются по максимуму.
Есть ещё полуплотные
Прямой/косвенный метод
Косвенные методы (Indirect) – Проходят в два этапа. Во-первых, происходит
Прямой/косвенный метод
Косвенные методы (Indirect) – Проходят в два этапа. Во-первых, происходит
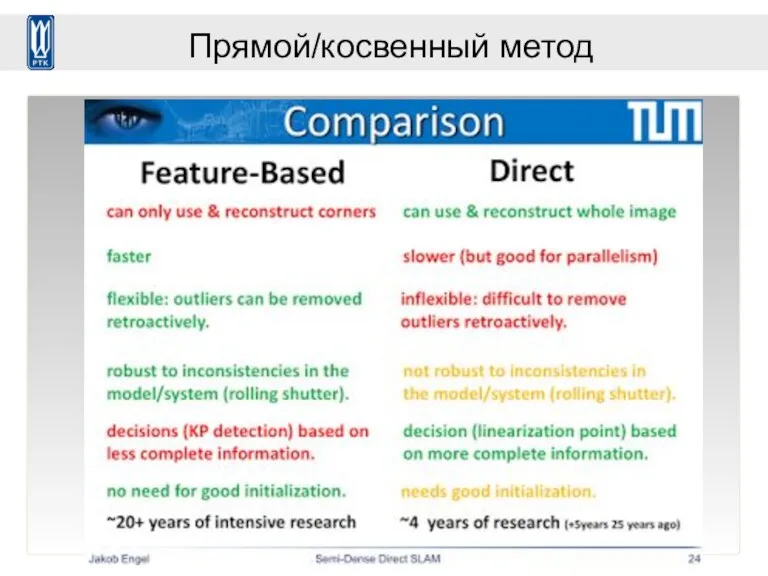
Прямой/косвенный метод
Прямой/косвенный метод
Комбинации подходов
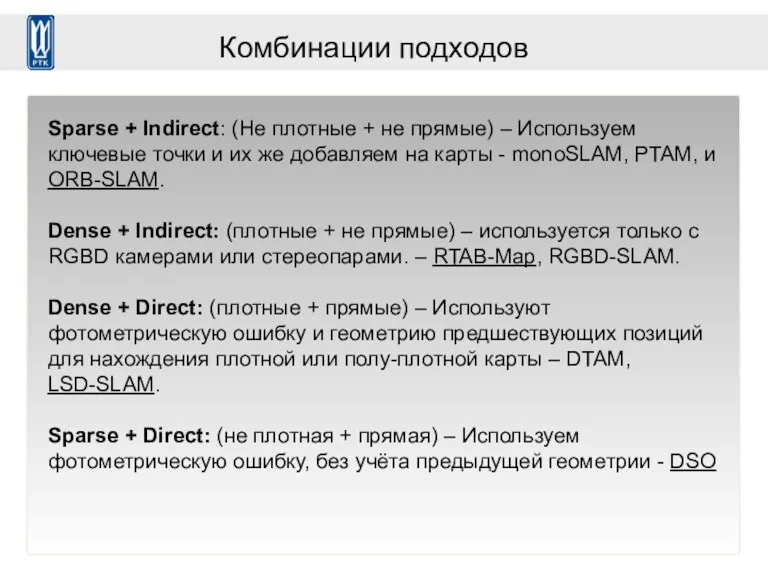
Sparse + Indirect: (Не плотные + не прямые) – Используем
Комбинации подходов
Sparse + Indirect: (Не плотные + не прямые) – Используем

Разделение по камерам
Разделение по камерам
RTAB-Map
RTAB-Map (Real-Time Appearance-Based Mapping) – визуальный алгоритм SLAM на основе графа
RTAB-Map
RTAB-Map (Real-Time Appearance-Based Mapping) – визуальный алгоритм SLAM на основе графа
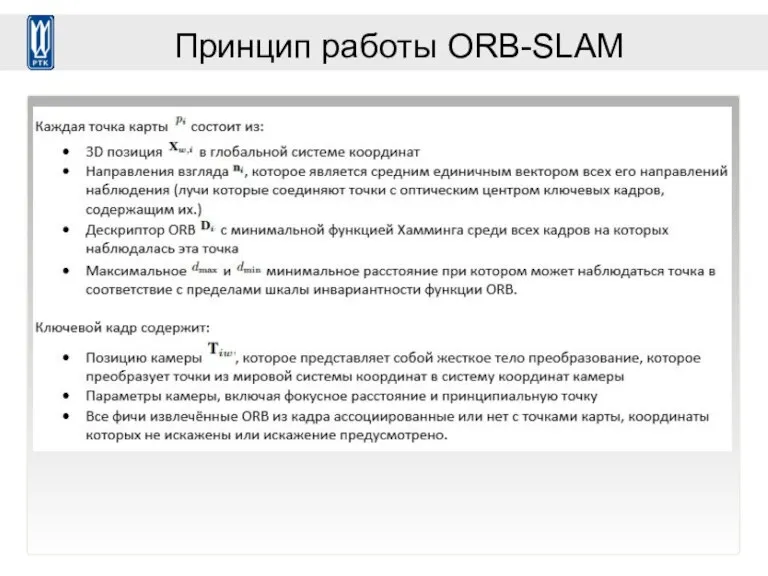
Принцип работы RTAB-Map
Каждый узел графа (ключевой кадр) содержит свою позицию в
Принцип работы RTAB-Map
Каждый узел графа (ключевой кадр) содержит свою позицию в
Принцип работы RTAB-Map
1) Первый кадр становится ключевым. Его карта глубины добавляется
Принцип работы RTAB-Map
1) Первый кадр становится ключевым. Его карта глубины добавляется
Фишки RTAB-Map
1) Большое количество дескрипторов и детекторов точек:
0=SURF 1=SIFT 2=ORB
Фишки RTAB-Map
1) Большое количество дескрипторов и детекторов точек:
0=SURF 1=SIFT 2=ORB
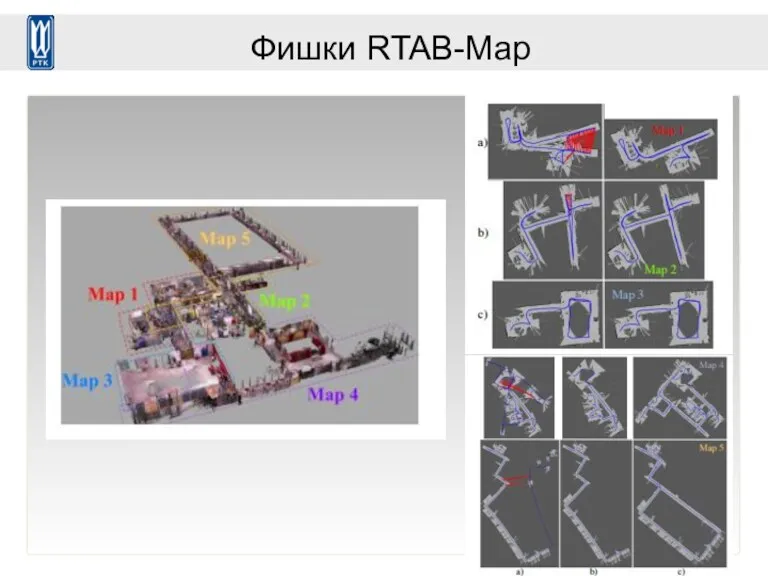
Фишки RTAB-Map
Фишки RTAB-Map

Не забудь скачать видосик с рабочего компа
Пример работы RTAB-Map
Не забудь скачать видосик с рабочего компа
Пример работы RTAB-Map
ORB-SLAM
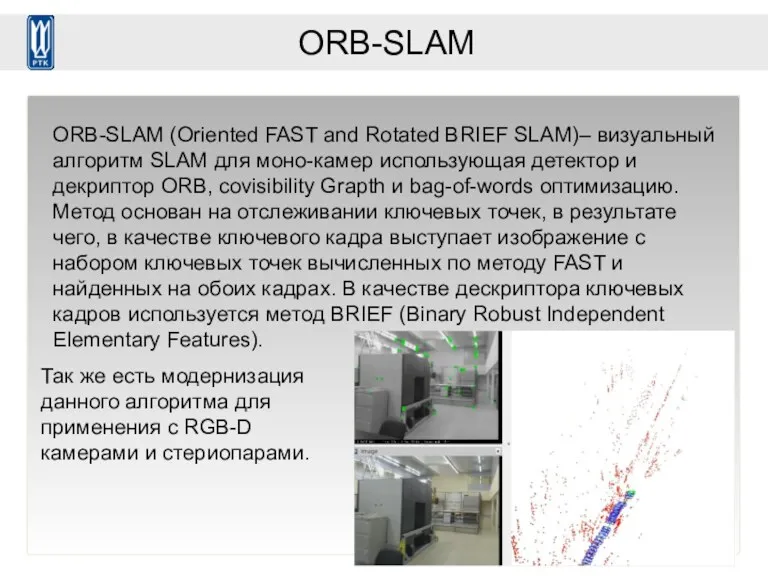
ORB-SLAM (Oriented FAST and Rotated BRIEF SLAM)– визуальный алгоритм SLAM для
ORB-SLAM
ORB-SLAM (Oriented FAST and Rotated BRIEF SLAM)– визуальный алгоритм SLAM для

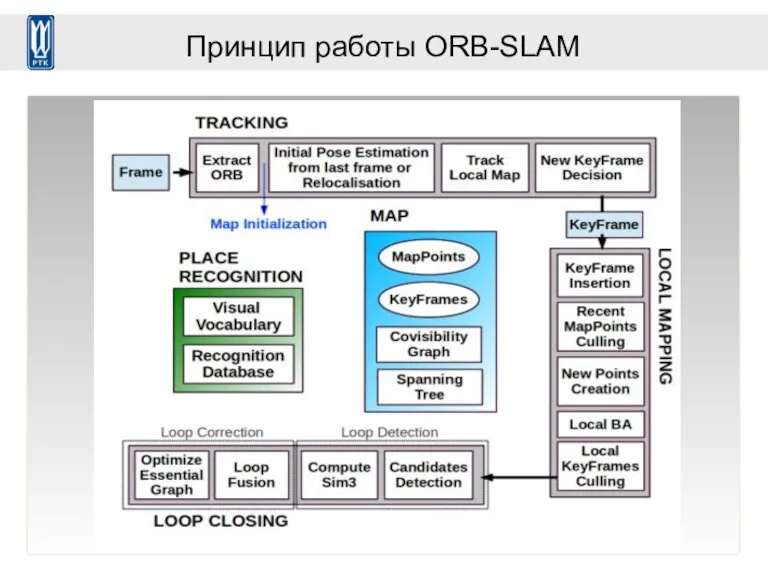
Принцип работы ORB-SLAM
Принцип работы ORB-SLAM
Принцип работы ORB-SLAM
Принцип работы ORB-SLAM
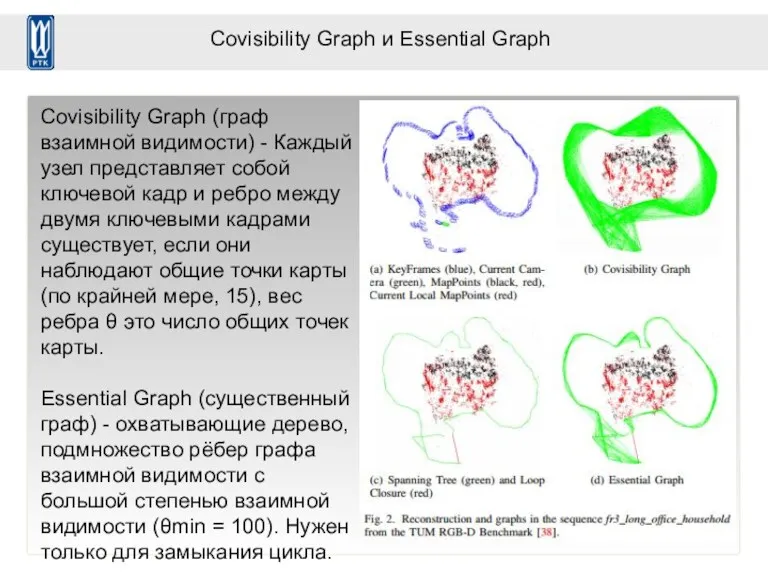
Covisibility Graph и Essential Graph
Covisibility Graph (граф взаимной видимости) -
Covisibility Graph и Essential Graph
Covisibility Graph (граф взаимной видимости) -
Шаг 0: Инициализация
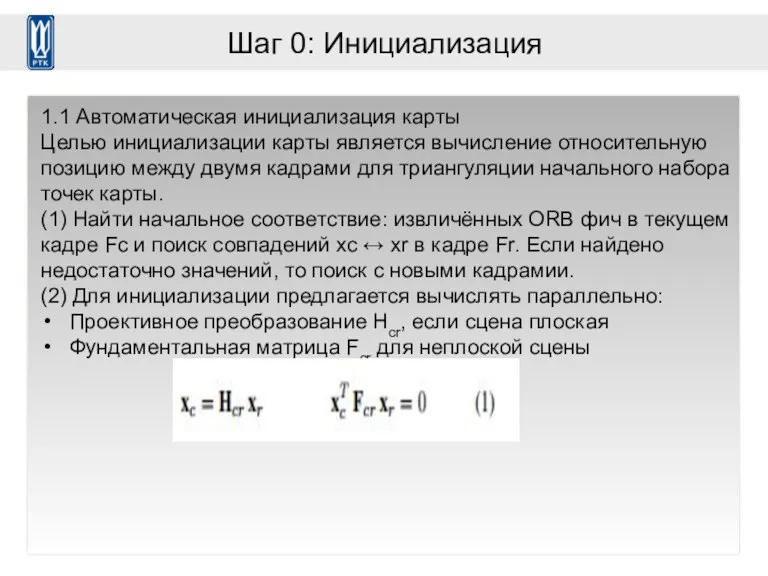
1.1 Автоматическая инициализация карты
Целью инициализации карты является вычисление относительную
Шаг 0: Инициализация
1.1 Автоматическая инициализация карты
Целью инициализации карты является вычисление относительную
Шаг 0: Инициализация
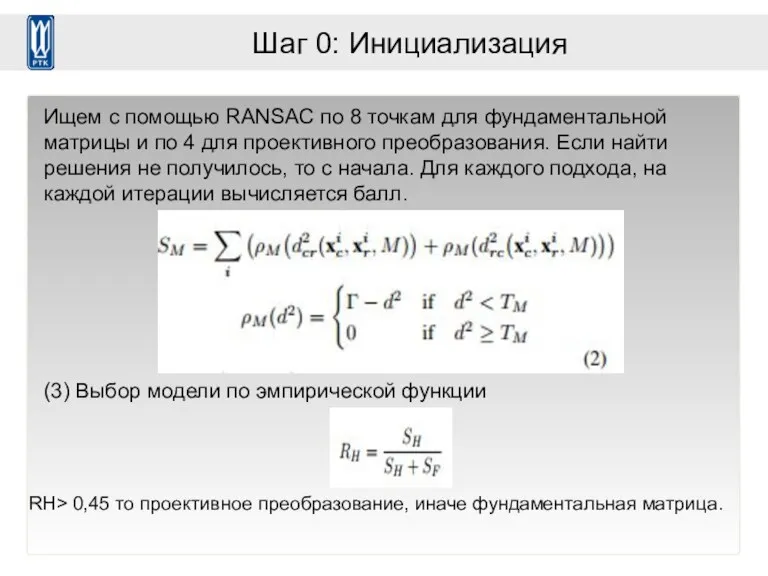
Ищем с помощью RANSAC по 8 точкам для фундаментальной
Шаг 0: Инициализация
Ищем с помощью RANSAC по 8 точкам для фундаментальной
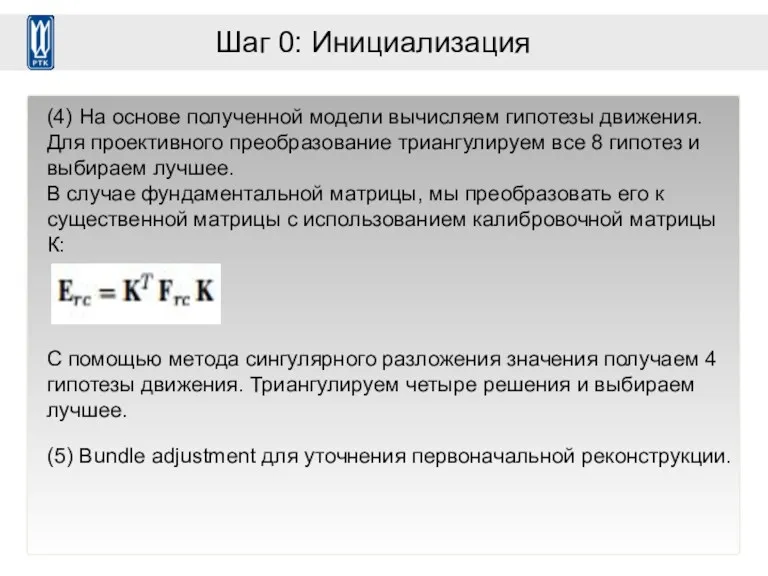
(4) На основе полученной модели вычисляем гипотезы движения. Для проективного преобразование
(4) На основе полученной модели вычисляем гипотезы движения. Для проективного преобразование
Bundle adjustment, чтобы не спрашивали
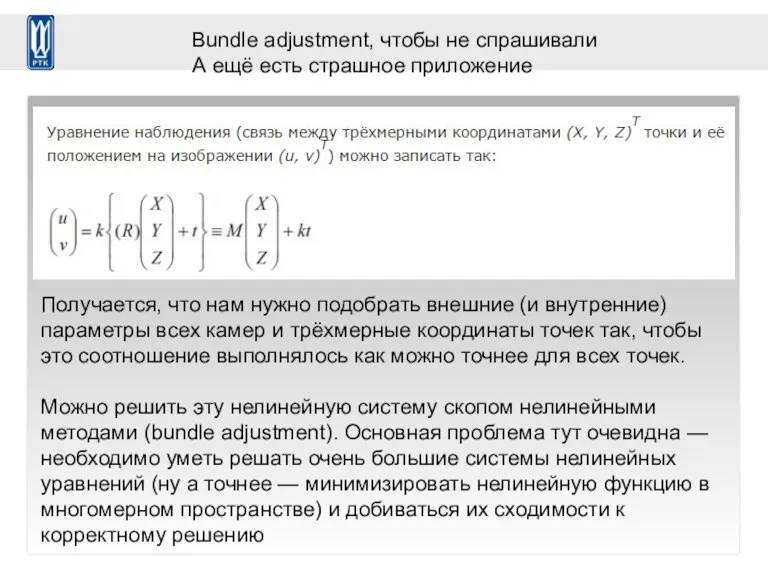
А ещё есть страшное приложение
Получается, что нам
Bundle adjustment, чтобы не спрашивали
А ещё есть страшное приложение
Получается, что нам

Принцип работы ORB-SLAM
Принцип работы ORB-SLAM
Шаг 1: TRACKING
Извлечение FAST corners фич из кадра на 8 масштабных
Шаг 1: TRACKING
Извлечение FAST corners фич из кадра на 8 масштабных
Теперь для каждой точки на карте из К1 и К2 производится
Теперь для каждой точки на карте из К1 и К2 производится
Шаг 1: TRACKING
5) Выбор нового ключевого кадра
Новый ключевой кадр может быть
Шаг 1: TRACKING
5) Выбор нового ключевого кадра
Новый ключевой кадр может быть
Шаг 2: LOCAL MAPPING
Вставка ключевого кадра – Обновляем covisibility граф и
Шаг 2: LOCAL MAPPING
Вставка ключевого кадра – Обновляем covisibility граф и
Принцип работы ORB-SLAM
Принцип работы ORB-SLAM
Шаг 3: LOOP CLOSING
1) Детектор кандидатов для закрытия цикла
Сначала мы вычислим
Шаг 3: LOOP CLOSING
1) Детектор кандидатов для закрытия цикла
Сначала мы вычислим
Шаг 3: LOOP CLOSING
3) Loop Fusion
Объединили повторяющиеся точки и вставили новые
Шаг 3: LOOP CLOSING
3) Loop Fusion
Объединили повторяющиеся точки и вставили новые
Решил не писать сюда функции оптимизации, но ежели вы хотите
То можем
Решил не писать сюда функции оптимизации, но ежели вы хотите
То можем
Пример работы ORB SLAM
Видосик не вставился. Свернуть и показать. Файл orb.ogv
Пример работы ORB SLAM
Видосик не вставился. Свернуть и показать. Файл orb.ogv
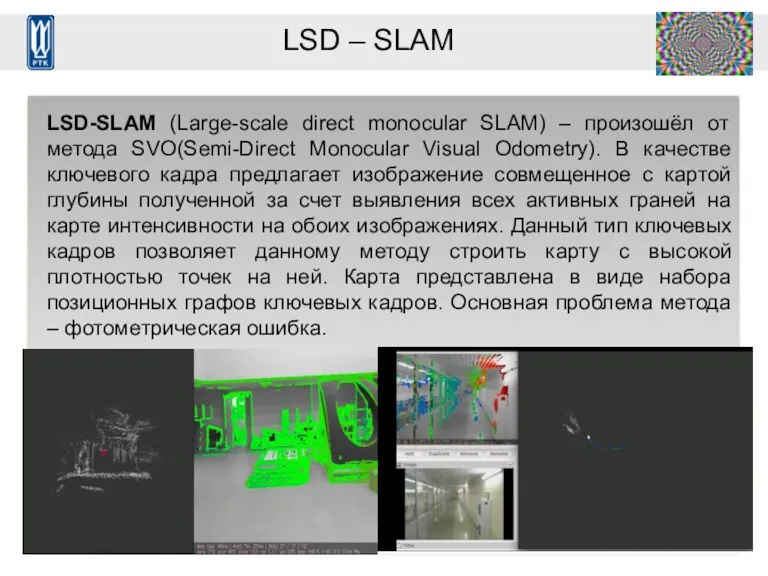
LSD – SLAM
LSD-SLAM (Large-scale direct monocular SLAM) – произошёл от метода
LSD – SLAM
LSD-SLAM (Large-scale direct monocular SLAM) – произошёл от метода
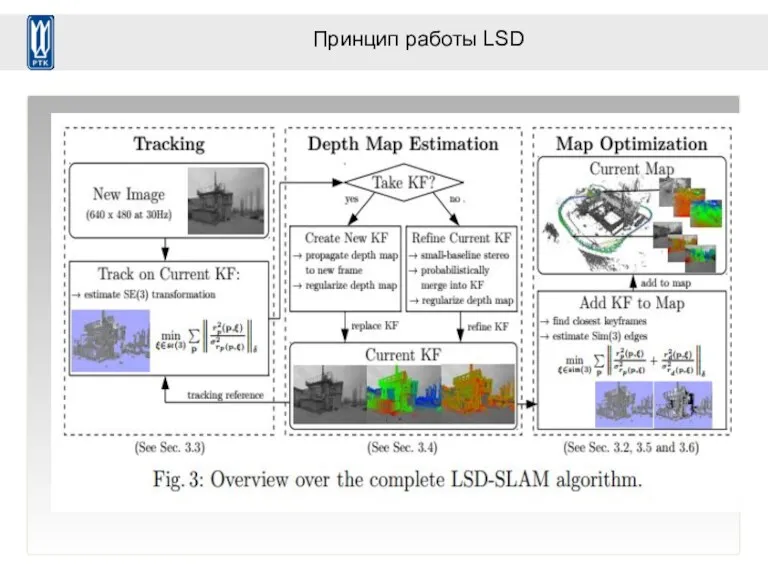
Принцип работы LSD
Принцип работы LSD
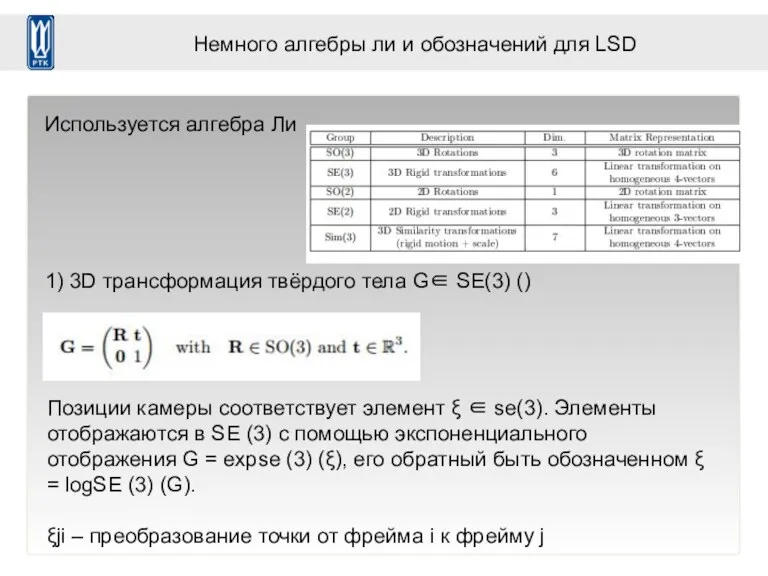
Немного алгебры ли и обозначений для LSD
Используется алгебра Ли
1) 3D
Немного алгебры ли и обозначений для LSD
Используется алгебра Ли
1) 3D
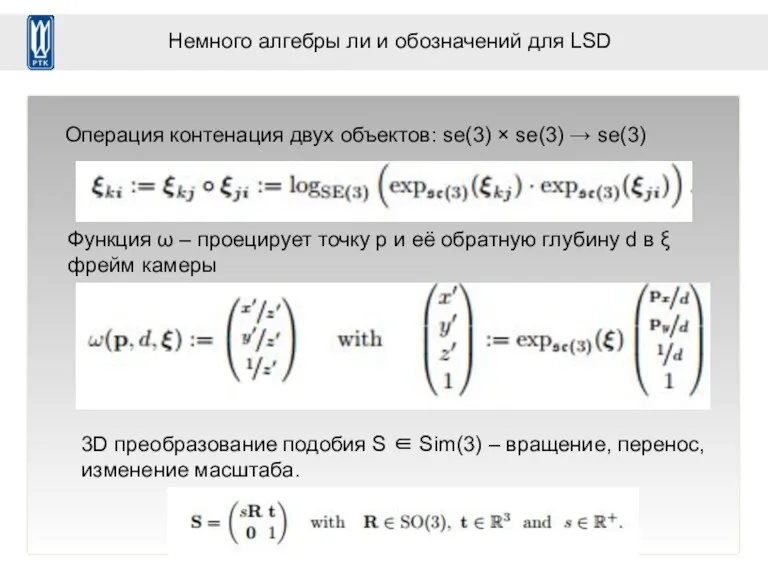
Немного алгебры ли и обозначений для LSD
Операция контенация двух объектов:
Немного алгебры ли и обозначений для LSD
Операция контенация двух объектов:
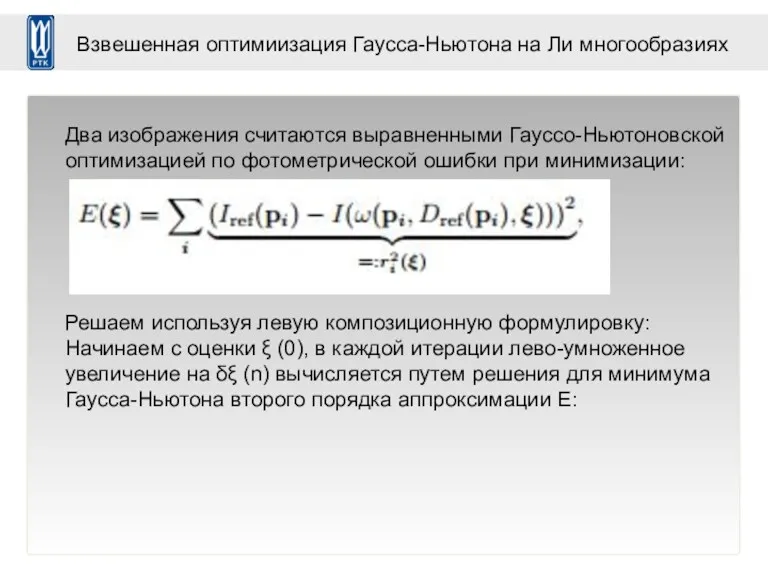
Взвешенная оптимиизация Гаусса-Ньютона на Ли многообразиях
Два изображения считаются выравненными Гауссо-Ньютоновской оптимизацией
Взвешенная оптимиизация Гаусса-Ньютона на Ли многообразиях
Два изображения считаются выравненными Гауссо-Ньютоновской оптимизацией
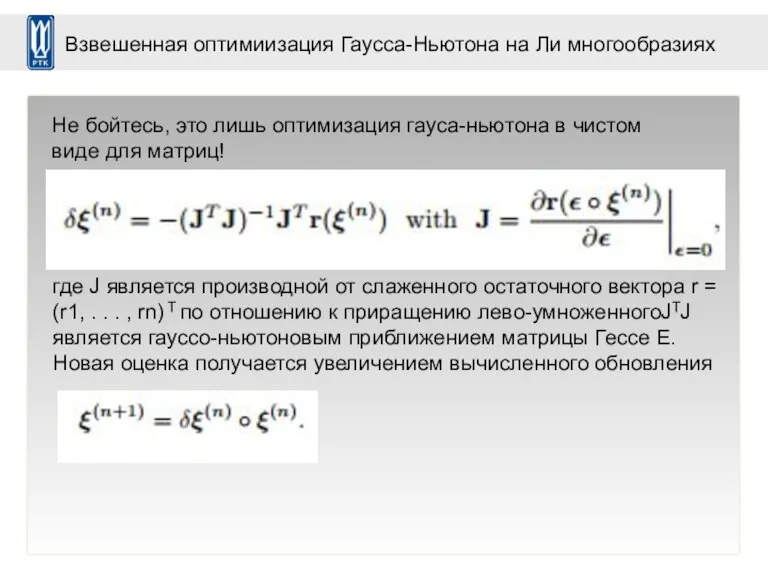
где J является производной от слаженного остаточного вектора r = (r1,
где J является производной от слаженного остаточного вектора r = (r1,
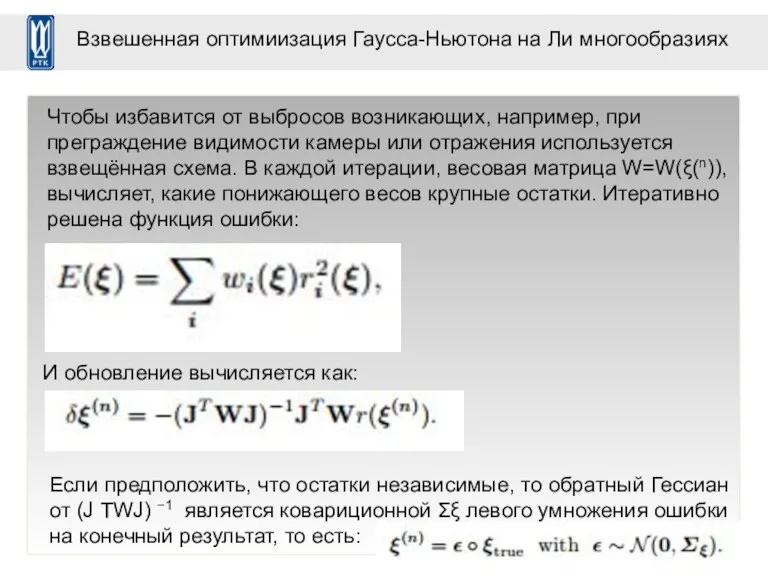
Чтобы избавится от выбросов возникающих, например, при преграждение видимости камеры или
Чтобы избавится от выбросов возникающих, например, при преграждение видимости камеры или
Propagation of Uncertainty
Распространение неопределенности представляет собой статистический инструмент для получения неопределенности
Propagation of Uncertainty
Распространение неопределенности представляет собой статистический инструмент для получения неопределенности
Принцип работы LSD
Принцип работы LSD
Представление карты
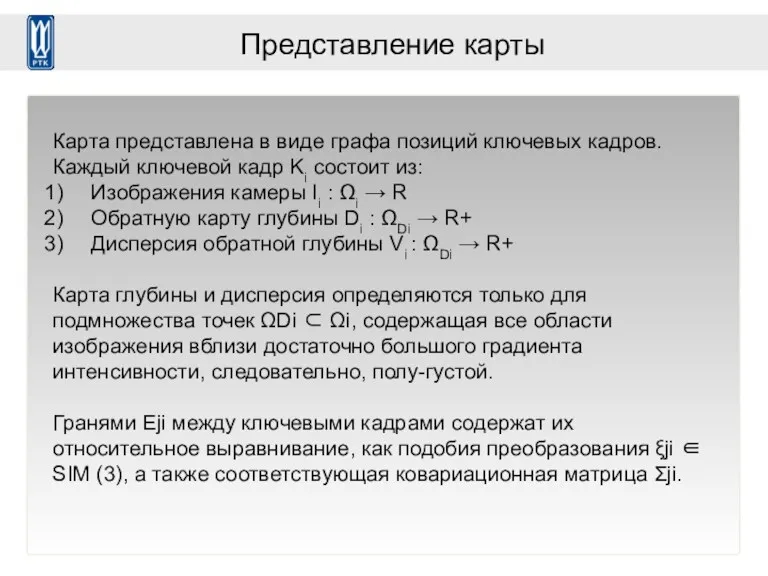
Карта представлена в виде графа позиций ключевых кадров.
Каждый ключевой кадр
Представление карты
Карта представлена в виде графа позиций ключевых кадров.
Каждый ключевой кадр
Шаг 0: Инициализация
Достаточно инициализировать случайную карту глубины с большой дисперсией. Несколько
Шаг 0: Инициализация
Достаточно инициализировать случайную карту глубины с большой дисперсией. Несколько
Шаг 1 :Tracking new Frames: Direct se(3) Image Alignment
Начиная с
Шаг 1 :Tracking new Frames: Direct se(3) Image Alignment
Начиная с
Шаг 2: Depth Map Estimation
Выбор ключевого кадра. Если камера перемещается слишком
Шаг 2: Depth Map Estimation
Выбор ключевого кадра. Если камера перемещается слишком
Детализация карты глубины. Отслеживаемые кадры, которые не являются ключевыми используются для
Детализация карты глубины. Отслеживаемые кадры, которые не являются ключевыми используются для
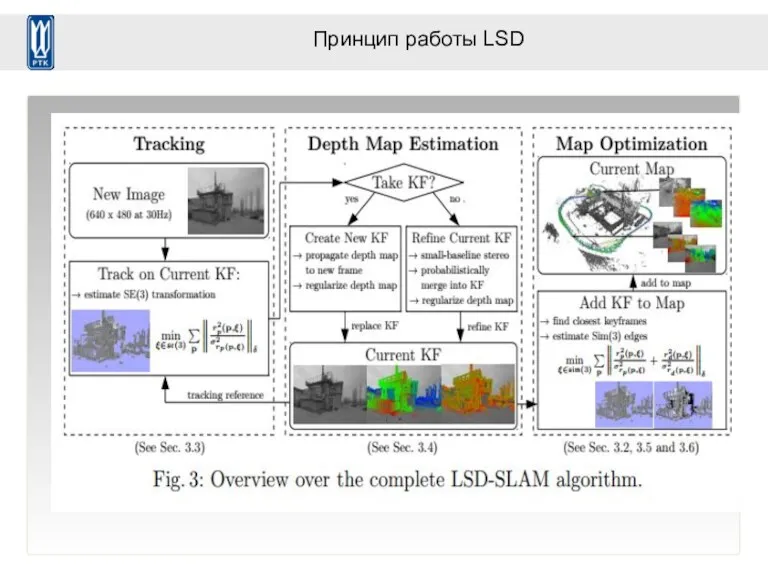
Принцип работы LSD
Принцип работы LSD
Шаг 3: Constraint Acquisition: Direct sim(3) Image Alignment
Direct Image Alignment
Шаг 3: Constraint Acquisition: Direct sim(3) Image Alignment
Direct Image Alignment
Шаг 3: Constraint Acquisition: Direct sim(3) Image Alignment
Они предложили новый
Шаг 3: Constraint Acquisition: Direct sim(3) Image Alignment
Они предложили новый
Шаг 3: Constraint Acquisition: Direct sim(3) Image Alignment
Constraint Search.
После того
Шаг 3: Constraint Acquisition: Direct sim(3) Image Alignment
Constraint Search.
После того
Шаг 4: Map optimization
Карта, состоящая из набора ключевых кадров и
Шаг 4: Map optimization
Карта, состоящая из набора ключевых кадров и
Пример работы LSD
Опять не тот формат видосика. Lsd.ogv
Пример работы LSD
Опять не тот формат видосика. Lsd.ogv
DSO
DSO (Direct Sparse Odometry) – алгоритм визуальной одометрии на основе монокамеры.
DSO
DSO (Direct Sparse Odometry) – алгоритм визуальной одометрии на основе монокамеры.
DSO
Не дано мне видио вставлять в презентацию. =(
DSO
Не дано мне видио вставлять в презентацию. =(
Для почитать перед сном
RTAB-Map - https://introlab.github.io/rtabmap/
ORB - https://arxiv.org/pdf/1502.00956.pdf
LSD - https://www.google.ru/url?sa=t&rct=j&q=&esrc=s&source=web&cd=2&ved=0ahUKEwii66yzsuXQAhWG2CwKHXLzDkoQFggjMAE&url=https%3A%2F%2Fvision.in.tum.de%2F_media%2Fspezial%2Fbib%2Fengel14eccv.pdf&usg=AFQjCNFXD8s5MGfd4IBcRFHaykkdw2TgXg&sig2=D7RQomXpGH6pY7f9o20ZrA&bvm=bv.141320020,d.bGg
DSO -
Для почитать перед сном
RTAB-Map - https://introlab.github.io/rtabmap/
ORB - https://arxiv.org/pdf/1502.00956.pdf
LSD - https://www.google.ru/url?sa=t&rct=j&q=&esrc=s&source=web&cd=2&ved=0ahUKEwii66yzsuXQAhWG2CwKHXLzDkoQFggjMAE&url=https%3A%2F%2Fvision.in.tum.de%2F_media%2Fspezial%2Fbib%2Fengel14eccv.pdf&usg=AFQjCNFXD8s5MGfd4IBcRFHaykkdw2TgXg&sig2=D7RQomXpGH6pY7f9o20ZrA&bvm=bv.141320020,d.bGg
DSO -
 Hackers
Hackers Защита персонального компьютера от вредоносных программ
Защита персонального компьютера от вредоносных программ Java SE 4. Collections. Иерархия интерфейсов
Java SE 4. Collections. Иерархия интерфейсов Определение информационной безопасности. Классификация угроз безопасности. Лекция №1
Определение информационной безопасности. Классификация угроз безопасности. Лекция №1 Графический редактор Inkscape.
Графический редактор Inkscape. Автоматизированная информационная система Молодежь России
Автоматизированная информационная система Молодежь России Электронное правительство Китая
Электронное правительство Китая Правовые и этические аспекты использования интернета
Правовые и этические аспекты использования интернета Файлы. Определение понятий
Файлы. Определение понятий Оператор цикла While. ОТП, 6 класс, урок 2
Оператор цикла While. ОТП, 6 класс, урок 2 Материалы к уроку Информационная культура
Материалы к уроку Информационная культура Конструирование объектов
Конструирование объектов Использование модели eTOM при разработке и внедрении систем OSS/BSS
Использование модели eTOM при разработке и внедрении систем OSS/BSS Интернет-журналистика
Интернет-журналистика Java-ның интегралданған орталары
Java-ның интегралданған орталары Подходы к понятию и измерению информации. Информационные объекты различных видов
Подходы к понятию и измерению информации. Информационные объекты различных видов Разработка обложки книги (журнала)
Разработка обложки книги (журнала) Системы счисления
Системы счисления Профессиональное программирование. Системно-философский подход
Профессиональное программирование. Системно-философский подход Инфокоммуникационная сеть, как большая и сложная система
Инфокоммуникационная сеть, как большая и сложная система Вирусы и антивирусные программы
Вирусы и антивирусные программы Настройки окружения, ламп и камер в Blender
Настройки окружения, ламп и камер в Blender Автоматизированные рабочие места (АРМ), области их применения, возможности. Информатика для СПО
Автоматизированные рабочие места (АРМ), области их применения, возможности. Информатика для СПО Унифицированный язык визуального моделирования UML
Унифицированный язык визуального моделирования UML Порядок назначения IP-адресов
Порядок назначения IP-адресов Защита информации в базах данных
Защита информации в базах данных Методы тестирования. Требования. Тестирование основанное на требованиях
Методы тестирования. Требования. Тестирование основанное на требованиях Дополнительные возможности SQL
Дополнительные возможности SQL